博主介绍:✌全网粉丝50W+,前互联网大厂软件研发、集结硕博英豪成立软件开发工作室,专注于计算机相关专业项目实战6年之久,累计开发项目作品上万套。凭借丰富的经验与专业实力,已帮助成千上万的学生顺利毕业,选择我们,就是选择放心、选择安心毕业✌
> 🍅想要获取完整文章或者源码,或者代做,拉到文章底部即可与我联系了。🍅
2、大数据、计算机专业选题(Python/Java/大数据/深度学习/机器学习)(建议收藏)✅
1、项目介绍
技术栈:Python语言、opencv、mediapipe、基于MediaPipe的改进SSD算法(深度学习)、pyqt库
2、项目界面
(1)功能界面

(2)摄像头实时检测识别-- 多目标检测识别

(3)摄像头实时检测识别-- 多目标检测识别

(4)摄像头实时检测识别-- 多目标检测识别

(5)上传图片实时检测识别-- 多目标检测识别
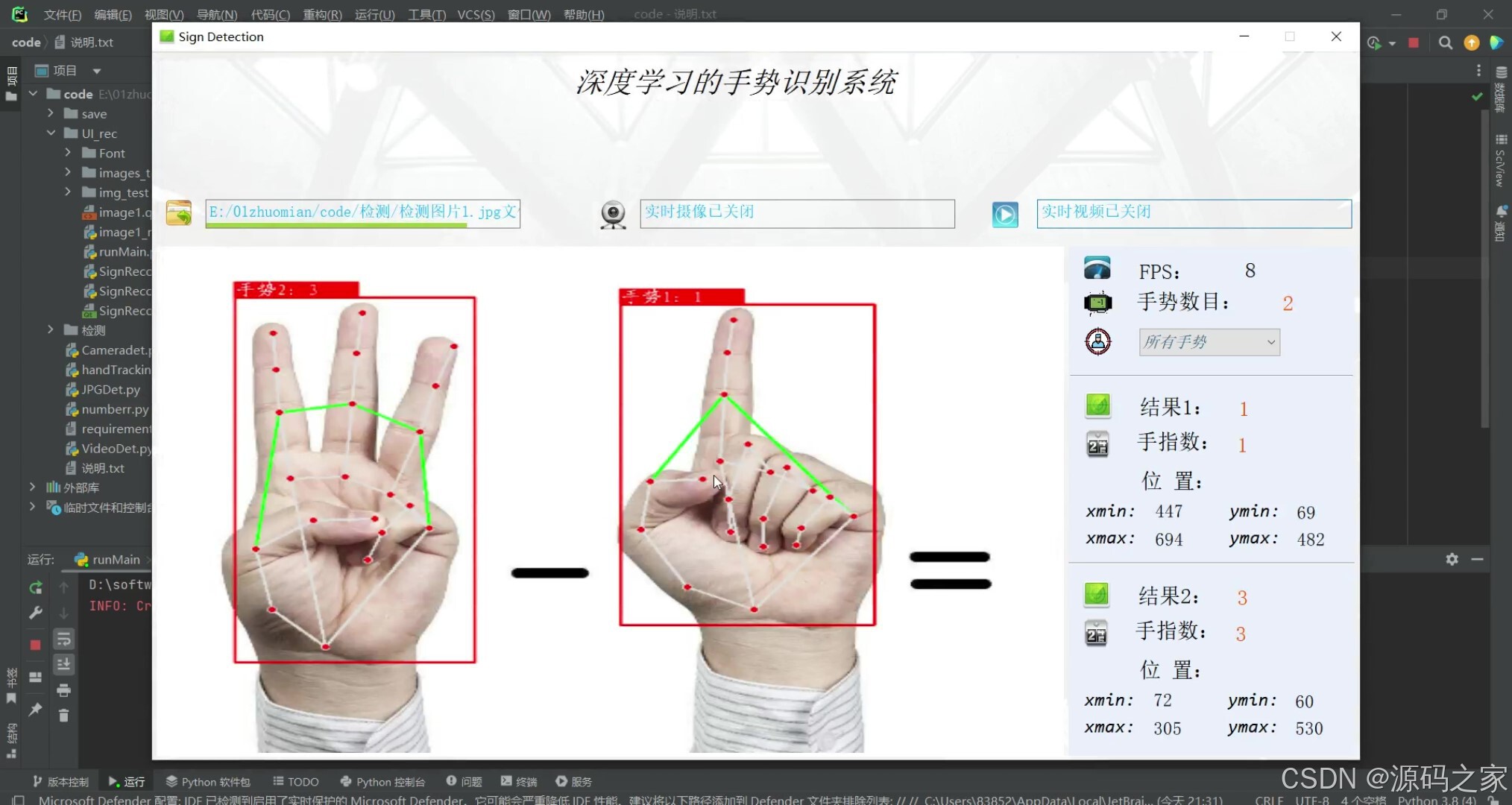
3、项目说明
手势识别采用了基于MediaPipe的改进SSD算法,进行手掌检测后对手部关节坐标进行关键点定位;在系统界面中可以选择手势图片、视频进行检测识别,也可通过电脑连接的摄像头设备进行实时识别手势;可对图像中存在的多个手势进行姿势识别,可选择任意一个手势显示结果并标注,实时检测速度快、识别精度较高。
1、识别手势数字: 0、1、2、3、4、5、6、7、8、9
2、提示:一次只能识别1-2个手势
MediaPipe的改进SSD算法是基于深度学习的。SSD是一种用于目标检测的深度学习算法,它能够在一次前向传播中同时进行目标的定位和分类。MediaPipe对SSD算法进行了改进,以提高目标检测的准确性和效率。改进的过程通常涉及使用更强大的网络结构、优化训练过程、增加数据增强方法等等。因此,MediaPipe的改进SSD算法仍然属于深度学习的范畴。
使用python调用MediaPipe实现手势识别。
主要从三个方面来写这个脚本:
第一个如果识别静态照片的手势;
第二个如何识别视频流中的手势;
第三个如果实时识别摄像头图像。
4、核心代码
python
# -*- coding: utf-8 -*-
import mediapipe as mp
import cv2
import time
import math
cap = cv2.VideoCapture(0) # 0代表电脑自带摄像头
mp_drawing = mp.solutions.drawing_utils # 点和线的样式
mp_drawing_styles = mp.solutions.drawing_styles # 点和线的风格
mp_hands = mp.solutions.hands # 手势识别的API
'''
def __init__(self,
static_image_mode=False,
max_num_hands=2,
model_complexity=1, # 将其设置为更高的值可以增加解决方案的健壮性,
但代价是延迟更长。如果static_image_mode为true则被忽略
min_detection_confidence=0.5,
min_tracking_confidence=0.5):
'''
gesture = [0, 1, 2, 3, 4, 5] # 预设数字
def ges(hand_landmarks):
flag = 0
p0_x = hand_landmarks.landmark[0].x # 获取关键点0的x坐标
p0_y = hand_landmarks.landmark[0].y # 获取关键点0的x坐标
p5_x = hand_landmarks.landmark[5].x # 获取食指底部关键点5的x坐标
p5_y = hand_landmarks.landmark[5].y # 获取食指底部关键点5的y坐标
distance_0_5 = math.sqrt(pow(p0_x - p5_x, 2) ** 2 + pow(p0_y - p5_y, 2) ** 2) # 计算两个观点的距离
base = distance_0_5 / 0.6 # 人工经验将距离缩小0.6倍作为基础值
p4_x = hand_landmarks.landmark[4].x # 获取大拇指顶部关键点4的x坐标
p4_y = hand_landmarks.landmark[4].y # 获取大拇指顶部关键点4的y坐标
distance_5_4 = math.sqrt(pow(p5_x - p4_x, 2) ** 2 + pow(p5_y - p4_y, 2) ** 2) # 计算关键点4到关键点5的距离,判断大拇指是否处于张开状态
p8_x = hand_landmarks.landmark[8].x # 获取食指顶部关键字8的x坐标
p8_y = hand_landmarks.landmark[8].y # 获取食指顶部关键字8的y坐标
distance_0_8 = math.sqrt(pow(p0_x - p8_x, 2) ** 2 + pow(p0_y - p8_y, 2) ** 2) # 计算关键点0到关键点8的距离,判断食指是否处于张开状态
p12_x = hand_landmarks.landmark[12].x # 获取中指顶部关键点12的x坐标
p12_y = hand_landmarks.landmark[12].y # 获取中指顶部关键点12的y坐标
distance_0_12 = math.sqrt(pow(p0_x - p12_x, 2) ** 2 + pow(p0_y - p12_y, 2) ** 2) # 计算关键点0到关键点12的距离,判断中指是否处于张开状态
p16_x = hand_landmarks.landmark[16].x # 获取无名指关键点16的x坐标
p16_y = hand_landmarks.landmark[16].y # 获取无名指关键点16的y坐标
distance_0_16 = math.sqrt(pow(p0_x - p16_x, 2) ** 2 + pow(p0_y - p16_y, 2) ** 2) # 计算关键点0到关键点16的距离,判断无名指是否处于张开状态
p20_x = hand_landmarks.landmark[20].x # 获取小拇指关键点20的x坐标
p20_y = hand_landmarks.landmark[20].y # 获取小拇指关键点20的y坐标
distance_0_20 = math.sqrt(pow(p0_x - p20_x, 2) ** 2 + pow(p0_y - p20_y, 2) ** 2) # 计算关键点0到关键点20的距离,判断小拇指是否处于张开状态
'''
判断有几根手指处于张开状态
'''
if distance_0_8 > base:
flag += 1
if distance_0_12 > base:
flag += 1
if distance_0_16 > base:
flag += 1
if distance_0_20 > base:
flag += 1
if distance_5_4 > base * 0.2: # 调低大拇指伸直阈值
flag += 1
return gesture[flag] # 通过索引值返回数字
with mp_hands.Hands(
static_image_mode=False, # False表示为视频流检测
max_num_hands=2, # 最大可检测到两只手掌
model_complexity=0, # 可设为0或者1,主要跟模型复杂度有关
min_detection_confidence=0.5, # 最大检测阈值
min_tracking_confidence=0.5 # 最小追踪阈值
) as hands:
while cap.isOpened(): # 判断相机是否打开
success, image = cap.read() # 返回两个值:一个表示状态,一个是图像矩阵
if not success:
print('无效相机流')
continue
image.flags.writeable = False # 将图像矩阵修改为仅读模式
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
t0 = time.time()
results = hands.process(image) # 使用API处理图像图像
'''
results.multi_handedness
包括label和score,label是字符串"Left"或"Right",score是置信度
results.multi_hand_landmarks
results.multi_hand_landmrks:被检测/跟踪的手的集合
其中每只手被表示为21个手部地标的列表,每个地标由x、y和z组成。
x和y分别由图像的宽度和高度归一化为[0.0,1.0]。Z表示地标深度
以手腕深度为原点,值越小,地标离相机越近。
z的大小与x的大小大致相同。
'''
t1 = time.time()
fps = 1 / (t1 - t0) # 实时帧率
# print('++++++++++++++fps',fps)
image.flags.writeable = True # 将图像矩阵修改为读写模式
image = cv2.cvtColor(image, cv2.COLOR_RGB2BGR) # 将图像变回BGR形式
dict_handnumber = {} # 创建一个字典。保存左右手的手势情况
if results.multi_handedness: # 判断是否检测到手掌
if len(results.multi_handedness) == 2: # 如果检测到两只手
for i in range(len(results.multi_handedness)):
label = results.multi_handedness[i].classification[0].label # 获得Label判断是哪几手
index = results.multi_handedness[i].classification[0].index # 获取左右手的索引号
hand_landmarks = results.multi_hand_landmarks[index] # 根据相应的索引号获取xyz值
mp_drawing.draw_landmarks(
image,
hand_landmarks,
mp_hands.HAND_CONNECTIONS, # 用于指定地标如何在图中连接。
mp_drawing_styles.get_default_hand_landmarks_style(), # 如果设置为None.则不会在图上标出关键点
mp_drawing_styles.get_default_hand_connections_style()) # 关键点的连接风格
gesresult = ges(hand_landmarks) # 传入21个关键点集合,返回数字
dict_handnumber[label] = gesresult # 与对应的手进行保存为字典
else: # 如果仅检测到一只手
label = results.multi_handedness[0].classification[0].label # 获得Label判断是哪几手
hand_landmarks = results.multi_hand_landmarks[0]
mp_drawing.draw_landmarks(
image,
hand_landmarks,
mp_hands.HAND_CONNECTIONS, # 用于指定地标如何在图中连接。
mp_drawing_styles.get_default_hand_landmarks_style(), # 如果设置为None.则不会在图上标出关键点
mp_drawing_styles.get_default_hand_connections_style()) # 关键点的连接风格
gesresult = ges(hand_landmarks) # 传入21个关键点集合,返回数字
dict_handnumber[label] = gesresult # 与对应的手进行保存为字典
if len(dict_handnumber) == 2: # 如果有两只手,则进入
# print(dict_handnumber)
leftnumber = dict_handnumber['Right']
rightnumber = dict_handnumber['Left']
'''
显示实时帧率,右手值,左手值,相加值
'''
s = 'FPS:{0}\nRighthand Value:{1}\nLefthand Value:{2}\nAdd is:{3}'.format(int(fps), rightnumber, leftnumber,
str(leftnumber + rightnumber)) # 图像上的文字内容
elif len(dict_handnumber) == 1: # 如果仅有一只手则进入
labelvalue = list(dict_handnumber.keys())[0] # 判断检测到的是哪只手
if labelvalue == 'Left': # 左手,不知为何,模型总是将左右手搞反,则引入人工代码纠正
number = list(dict_handnumber.values())[0]
s = 'FPS:{0}\nRighthand Value:{1}\nLefthand Value:0\nAdd is:{2}'.format(int(fps), number, number)
else: # 右手
number = list(dict_handnumber.values())[0]
s = 'FPS:{0}\nLefthand Value:{1}\nRighthand Value:0\nAdd is:{2}'.format(int(fps), number, number)
else: # 如果没有检测到则只显示帧率
s = 'FPS:{0}\n'.format(int(fps))
y0, dy = 50, 25 # 文字放置初始坐标
image = cv2.flip(image, 1) # 反转图像
for i, txt in enumerate(s.split('\n')): # 根据\n来竖向排列文字
y = y0 + i * dy
cv2.putText(image, txt, (50, y), cv2.FONT_HERSHEY_SIMPLEX, 1, (255, 0, 0), 3)
cv2.imshow('MediaPipe Gesture Recognition', image) # 显示图像
# cv2.imwrite('save/{0}.jpg'.format(t1),image)
if cv2.waitKey(5) & 0xFF == 27:
break
cap.release()🍅✌感兴趣的可以先收藏起来,点赞关注不迷路,想学习更多项目可以查看主页,大家在毕设选题,项目编程以及论文编写等相关问题都可以给我留言咨询,希望可以帮助同学们顺利毕业!🍅✌
5、源码获取方式
🍅由于篇幅限制,获取完整文章或源码、代做项目的,拉到文章底部即可看到个人联系方式。🍅
点赞、收藏、关注,不迷路,下方查看 👇🏻获取联系方式👇🏻