目录
[2.1 算法原理](#2.1 算法原理)
[2.2 算法优缺点](#2.2 算法优缺点)
[2.2.1 优点](#2.2.1 优点)
[2.2.2 缺点](#2.2.2 缺点)
[3.1 ROC曲线](#3.1 ROC曲线)
[3.1.1 基本原理](#3.1.1 基本原理)
[3.1.2 计算公式](#3.1.2 计算公式)
[3.2 AUC](#3.2 AUC)
[4.1 问题导入](#4.1 问题导入)
[4.1.1 问题](#4.1.1 问题)
[4.1.2 数据集类型](#4.1.2 数据集类型)
[4.2 问题分析](#4.2 问题分析)
[4.3 实现流程](#4.3 实现流程)
[4.3.1 流程示意图](#4.3.1 流程示意图)
[4.3.2 实现步骤讲解](#4.3.2 实现步骤讲解)
[4.3.2.1 导入数据](#4.3.2.1 导入数据)
[4.3.2.2 预处理](#4.3.2.2 预处理)
[4.3.2.3 最佳K值的选择](#4.3.2.3 最佳K值的选择)
[4.3.2.4 计算FPR和TPR、AUC并可视化ROC曲线](#4.3.2.4 计算FPR和TPR、AUC并可视化ROC曲线)
[4.3.2.5 计算特征混淆矩阵并可视化热力图(可选)](#4.3.2.5 计算特征混淆矩阵并可视化热力图(可选))
[5.1 环境准备](#5.1 环境准备)
[5.1.1 环境选择和参考文献](#5.1.1 环境选择和参考文献)
[5.1.1.1 gnuplot下载](#5.1.1.1 gnuplot下载)
[5.1.1.2 matplot++下载](#5.1.1.2 matplot++下载)
[5.1.1.3 参考文献](#5.1.1.3 参考文献)
[5.1.2 VS2022环境搭建](#5.1.2 VS2022环境搭建)
[5.1.2.1 文件管理](#5.1.2.1 文件管理)
[5.1.2.2 配置调整](#5.1.2.2 配置调整)
[5.1.2.3 premake配置(可以代替5.1.2.2)](#5.1.2.3 premake配置(可以代替5.1.2.2))
[5.2 代码实现](#5.2 代码实现)
[5.2.1 使用的头文件](#5.2.1 使用的头文件)
[5.2.2 使用结构体](#5.2.2 使用结构体)
[5.2.3 导入数据](#5.2.3 导入数据)
[5.2.4 预处理](#5.2.4 预处理)
[5.2.4.1 归一化](#5.2.4.1 归一化)
[5.2.4.2 洗牌](#5.2.4.2 洗牌)
[5.2.5 选择最佳k值](#5.2.5 选择最佳k值)
[5.2.5.1 计算欧几里得距离](#5.2.5.1 计算欧几里得距离)
[5.2.5.2 获取邻居各类别的数量](#5.2.5.2 获取邻居各类别的数量)
[5.2.5.3 选择出现最多的类别作为预测结果](#5.2.5.3 选择出现最多的类别作为预测结果)
[5.2.5.4 使用k折交叉验证计算准确率和三分类混淆矩阵](#5.2.5.4 使用k折交叉验证计算准确率和三分类混淆矩阵)
[5.2.5.5 网格搜索](#5.2.5.5 网格搜索)
[5.2.6 计算FPR和TPR](#5.2.6 计算FPR和TPR)
[5.2.6.1 将多类型数量转换为概率](#5.2.6.1 将多类型数量转换为概率)
[5.2.6.2 计算某一类型作为正例时单个点的FPR和TPR](#5.2.6.2 计算某一类型作为正例时单个点的FPR和TPR)
[5.2.6.3 将某一类别所有点数据整理补全起来](#5.2.6.3 将某一类别所有点数据整理补全起来)
[5.2.7 计算AUC](#5.2.7 计算AUC)
[5.2.8 可视化](#5.2.8 可视化)
[5.2.9 mian函数调用](#5.2.9 mian函数调用)
[5.3 运行结果展示](#5.3 运行结果展示)
[6.1 环境准备](#6.1 环境准备)
[6.1.1 在虚拟环境中配置环境](#6.1.1 在虚拟环境中配置环境)
[6.1.2 配置Pycharm](#6.1.2 配置Pycharm)
[6.2 代码实现](#6.2 代码实现)
[6.3 运行效果展示](#6.3 运行效果展示)
一、前言
本系列诞生的原因是小编被学校老师布置了作业,但既然要写成博客,那就不能敷衍了事,小编花了很多时间研究如何让KNN算法的时间、空间开销降低下来,努力了快一周了,还是没有成效,不过实战的代码实现都被打磨过,还是勉强能用的。
实现环境
C++:集成开发环境------VS2022,可视化库------matplot++
python:集成开发环境------Pycharm,数学库------numpy,可视化库------matplotlib
二、KNN算法讲解
2.1 算法原理
KNN,中文全称K近邻算法 ,是监督学习 的一种算法,通过计算待测样本与已知样本之间的距离 ,选择距离最近的k个 邻居,将出现最多的类别作为预测的类别。通常用于解决分类问题 ,也可以用作解决回归问题 ,将k个邻居的数值平均值作为预测结果。总之,就是通过预测点周围的点决定这个点的性质 ,数据集本身就是一个模型。实现起来比较简单,适合刚入门机器学习的读者。
但是这样讲还是太抽象了,下面直接结合着图片讲解。
假设图中蓝点圈起来的点都是某个k下的邻居,此时,我们不难看到,圈中红叉比黑叉多 ,此时蓝点选择红叉对应的类别作为预测蓝点类别的结果。
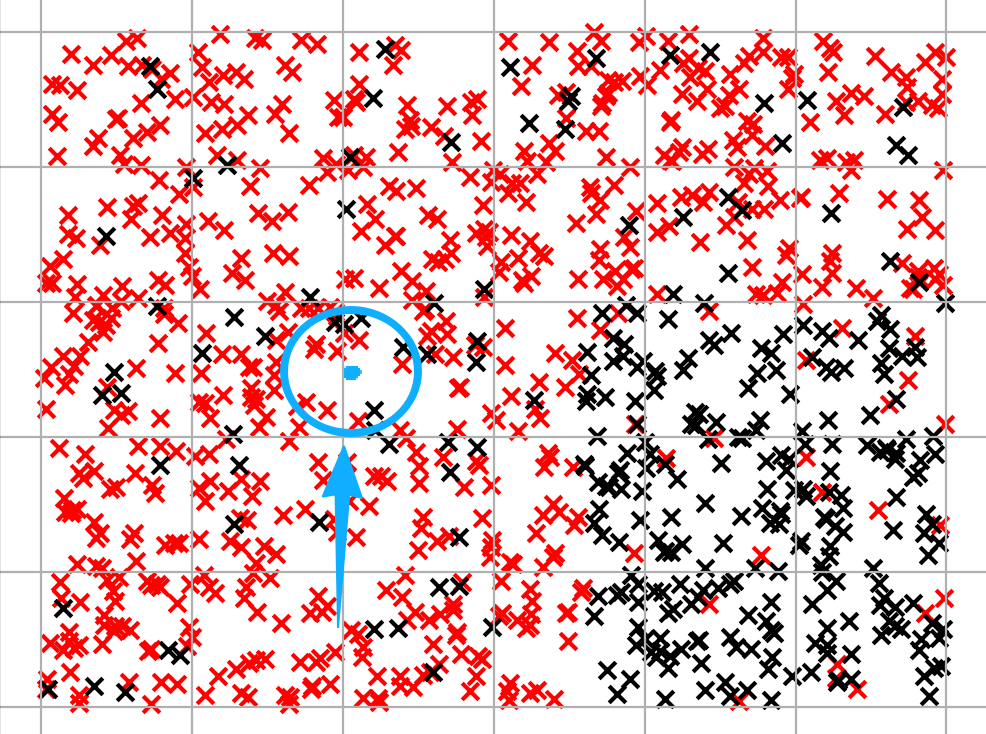
图2-1
2.2 算法优缺点
在利用机器学习解决事情时,算法的选择是必不可少的一个过程。只有选择了较为合适的算法去解决问题,才能更高效地处理问题。所以,下面介绍这个算法的优缺点,方便选择利用。
2.2.1 优点
- 这个算法是懒惰的,相较于其他的机器学习算法,不用做什么复杂的训练,不用去使用什么高深的数学公式,实现简单,逻辑上更贴近人类直觉;
- 不用像其他算法需要训练模型,耗时较小,容易得到结果;
- 既能解决回归问题,也能解决分类问题,适用性强;
- 当有新的样本进入数据集后,无需更新模型,因为数据集本身就是模型,可以直接用来预测。
2.2.2 缺点
- 每次使用时,都需要将所有数据导入内存,内存开销大;
- 预测时需要对预测点的k个邻居求距离,如果k设置的比较大,预测阶段可能会比较慢;
- 对K的设置敏感(如下图,随着K的变化,准确率不停上下波动),需要使用合适的算法确定K这个超参(在模型外人工设置的参数);
- 在多个维度,对特征敏感,有的特征在上千的数量级波动,有的特征在几十、零点几的数量级波动,这时候直接计算距离会导致上千数量级的特征影响很大,需要进行预处理。
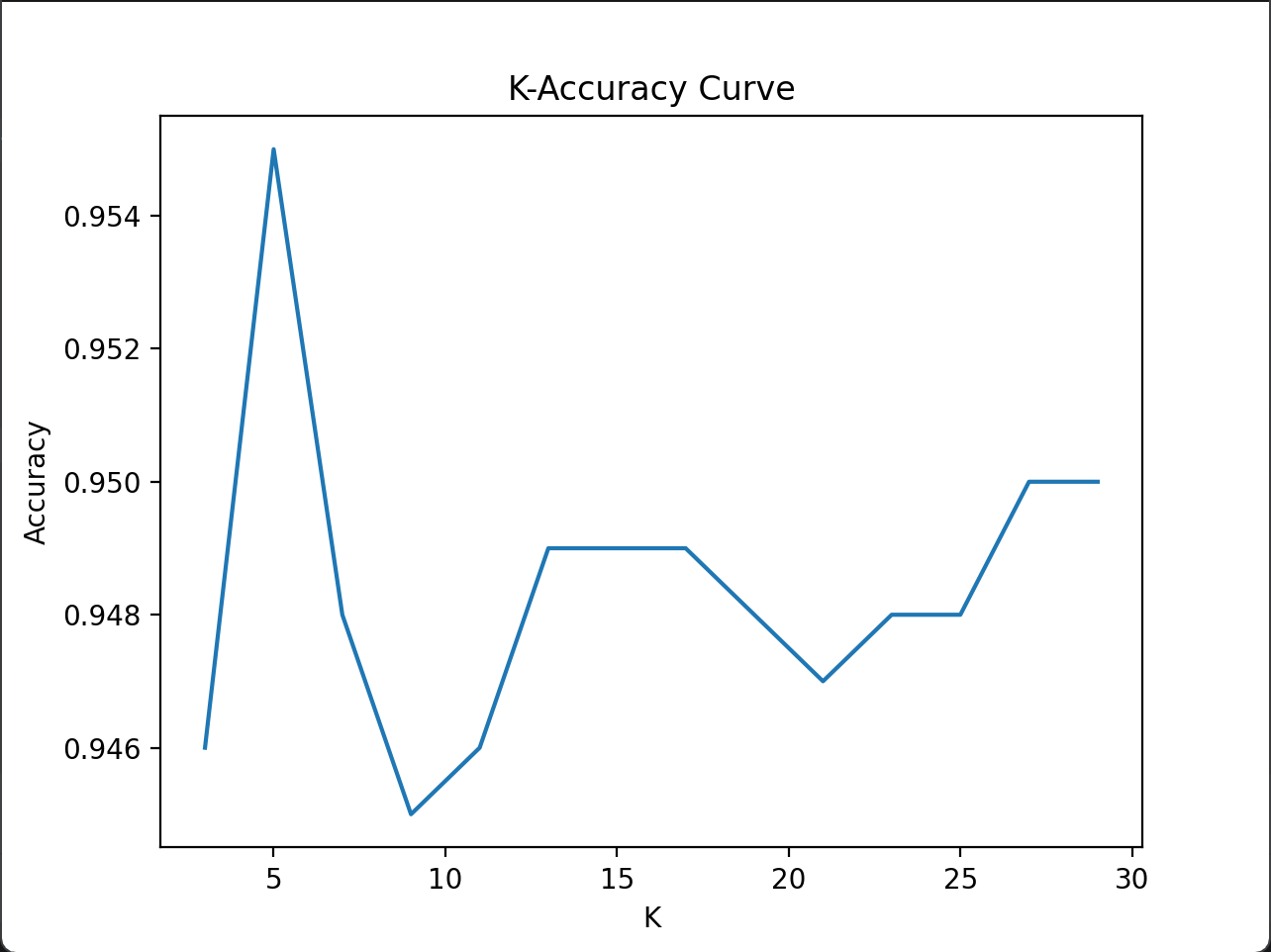
图2-2
三、评估标准介绍
本文使用的评估是ROC曲线及其对应的AUC值。
3.1 ROC曲线
ROC曲线,即受试者工作特征曲线,用于**衡量二分类模型的"区分能力"**的,就是说,ROC曲线适用于解决分类问题的模型的评估,本文的实战是个分类问题,可以使用这种评估标准评估。
3.1.1 基本原理
获取模型预估某个预测点的概率,通过连续的单向调整的置信度(从1到0或从0到1,单向是为了减少数据处理,可选 ),获得一连串FPR和TPR值。其中,FPR值是所有反例 中被错误当作正例 的比例,TPR值是所有正例 中正确识别出来 的正例 的比例,换句话说,当模型正确识别正例的能力越高、错误识别正例的能力越低 ,这个模型的分类能力就越强。
FPR和TPR的具体解释:
FPR (False Positive Rate),即假正确率,是用来描述模型中反例被误识别为正例的比例,分母就是所有反例,比例越低 ,即越难误识别,模型分类能力越强。
TPR (True Positive Rate),即真正确率,也叫召回率,是用来描述模型中正例被正确识别的比例,分母是所有正例,比例越高,即越容易区分出正例,模型分类能力越强。
3.1.2 计算公式
那么FPR和TPR怎么计算?
这里涉及到四个数据:TP(真正例)、FP(假正例)、FN(假反例)、TN(真反例)
这里的真假 ,是判断预测结果是否符合实际 ,预测为正例而实际为反例,就是假;
后面的正反 ,是预测的结果
|------|---------|---------|
| | 实际正例 | 实际反例 |
| 预测正例 | TP(真正例) | FP(假正例) |
| 预测反例 | FN(假反例) | TN(真反例) |
FPR计算公式:
TPR计算公式:
然而,当出现图3-1的情况时,两条曲线很接近,我们没办法通过肉眼判断那个模型分类效果好,这时候就要使用新的依据了。看图3-2,这时候,我们会怎么判断哪条曲线的模型分类能力更好呢?根据前面说的"正确识别正例的能力越高、错误识别正例的能力越低**"** ,我们可以很快地判断出橙色的曲线模型分类效果好。我们不难发现,曲线在越左上方,效果越好 ,这一点可以使用曲线下方围成的面积来描述。
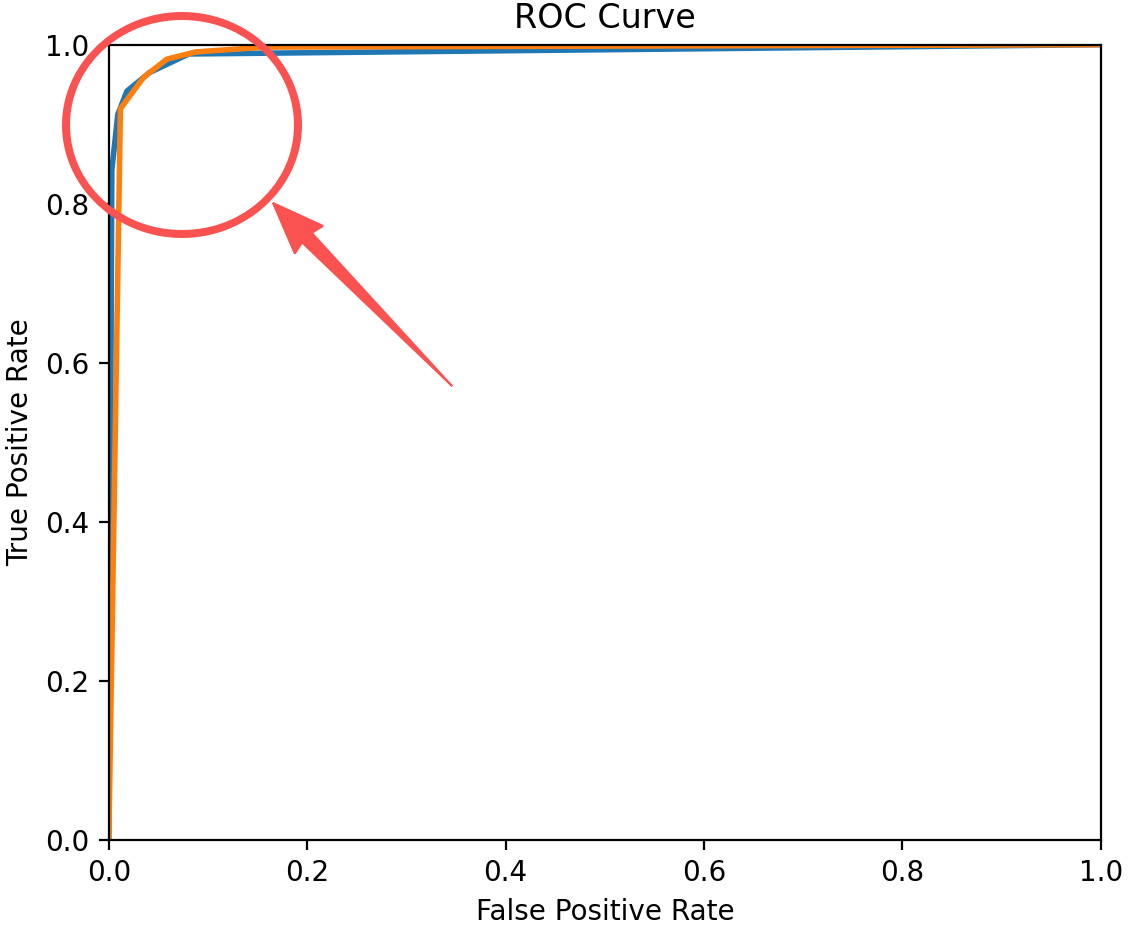
图3-1
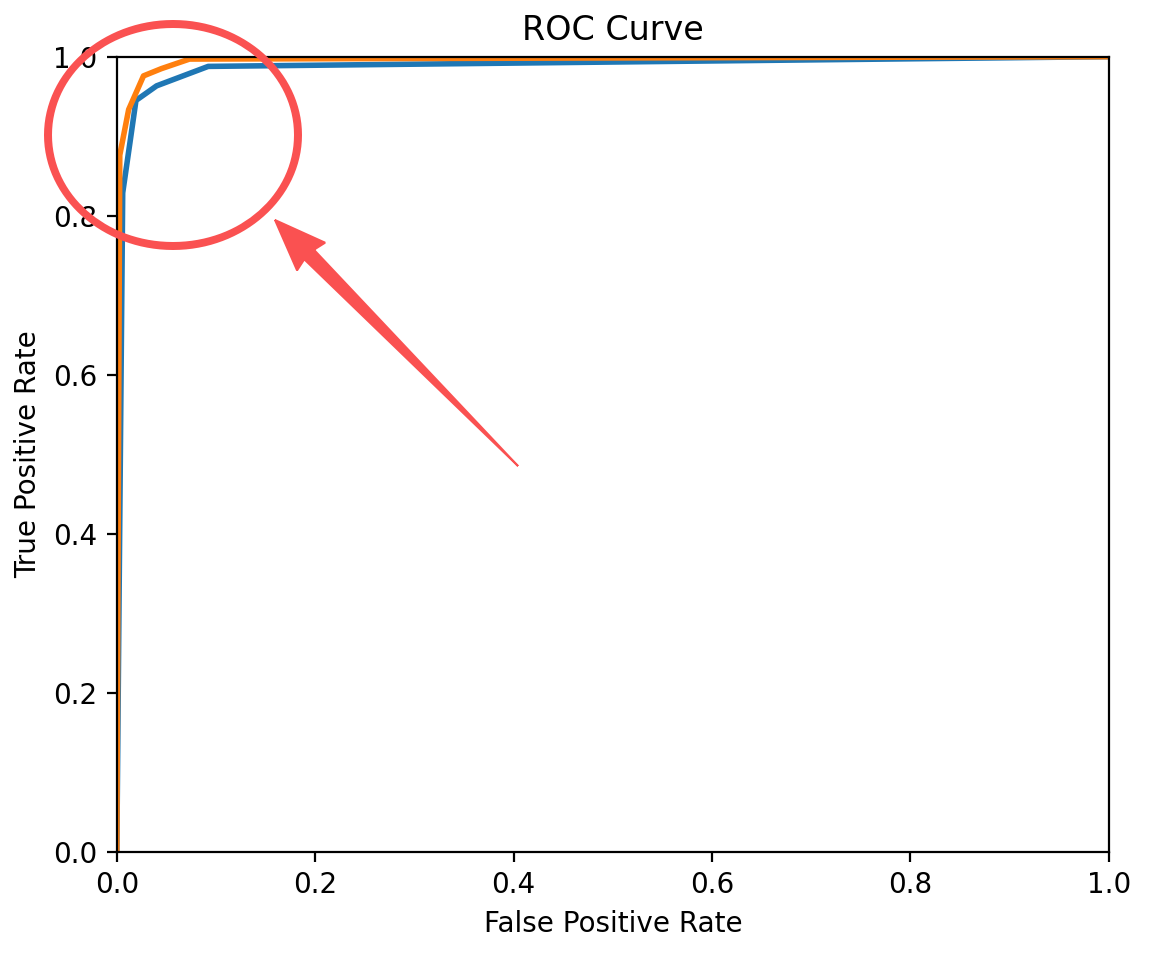
图3-2
3.2 AUC
AUC(Area Under ROC Curve),ROC曲线下方的面积。正如上面所说的,为了对模型分类能力有更标准的衡量,我们引入了AUC的概念。曲线越接近左上方,AUC围的面积就越接近1,所以,我们希望AUC的数值能越靠近1越好。
本文的特殊计算方式
本文采用梯形法计算,将每个小段的auc累加起来,对应的公式:
四、实战例题分析
4.1 问题导入
4.1.1 问题
海伦一直使用在线约会网站寻找适合自己的约会对象。她曾交往过三种类型的人:
- 不喜欢的人
- 一般喜欢的人
- 非常喜欢的人
这些人包含以下三种特征:
- 每年获得的飞行常客里程数
- 玩视频游戏所耗时间百分比
- 每周消费的冰淇淋公升数
该网站现在需要尽可能向海伦推荐她喜欢的人,需要我们设计一个分类器,根据用户的以上三种特征,识别出是否该向海伦推荐。
4.1.2 数据集类型
|---|--------------|--------------|--------------|------|
| | 每年获得的飞行常客里程数 | 玩视频游戏所耗时间百分比 | 每周消费的冰淇淋的公升数 | 样本分类 |
| 1 | 400 | 0.8 | 0.5 | 1 |
| 2 | 134000 | 12 | 0.9 | 3 |
| 3 | 20000 | 0 | 1.1 | 2 |
| 4 | 32000 | 67 | 0.1 | 2 |
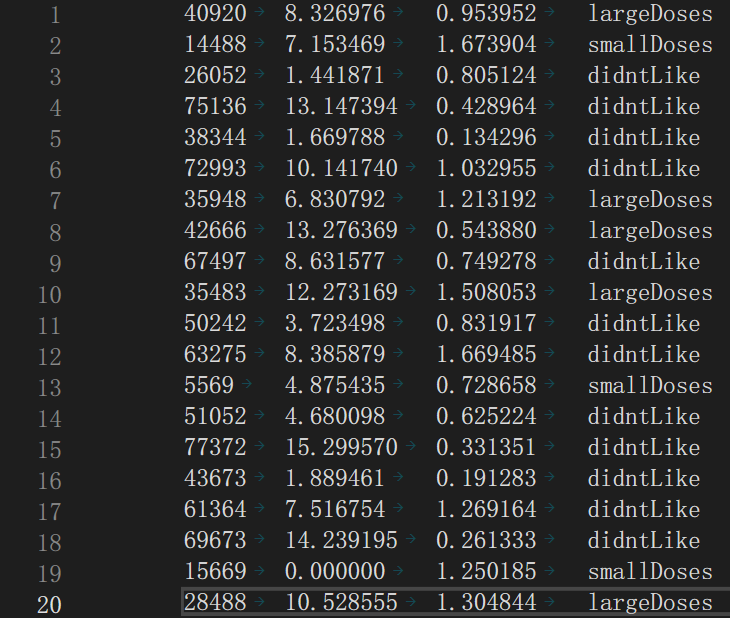
图4-1
4.2 问题分析
题目给出了三个特征维度,通过观察,我们可以发现,"每年获得的飞行常客里程数"这一特征维度的数据比另外两个大了2-3个数量级 ,我们还选择了欧几里得距离作为距离标准,所以需要对数据进行预处理 ,让每个特征维度的权重基本一致。
正如数据集类型表格给的样本分类,我们需要在导入图中数据时,将这些字符串转换为整型数据,方便使用。(largeDoses -- 0, smallDoses -- 1, didntLike -- 2,这里和表中不一样是为了方便后续处理)
4.3 实现流程
4.3.1 流程示意图
不是流程图,以为没有按流程图的标准画,"计算特征混淆矩阵"和"可视化热力图"可选
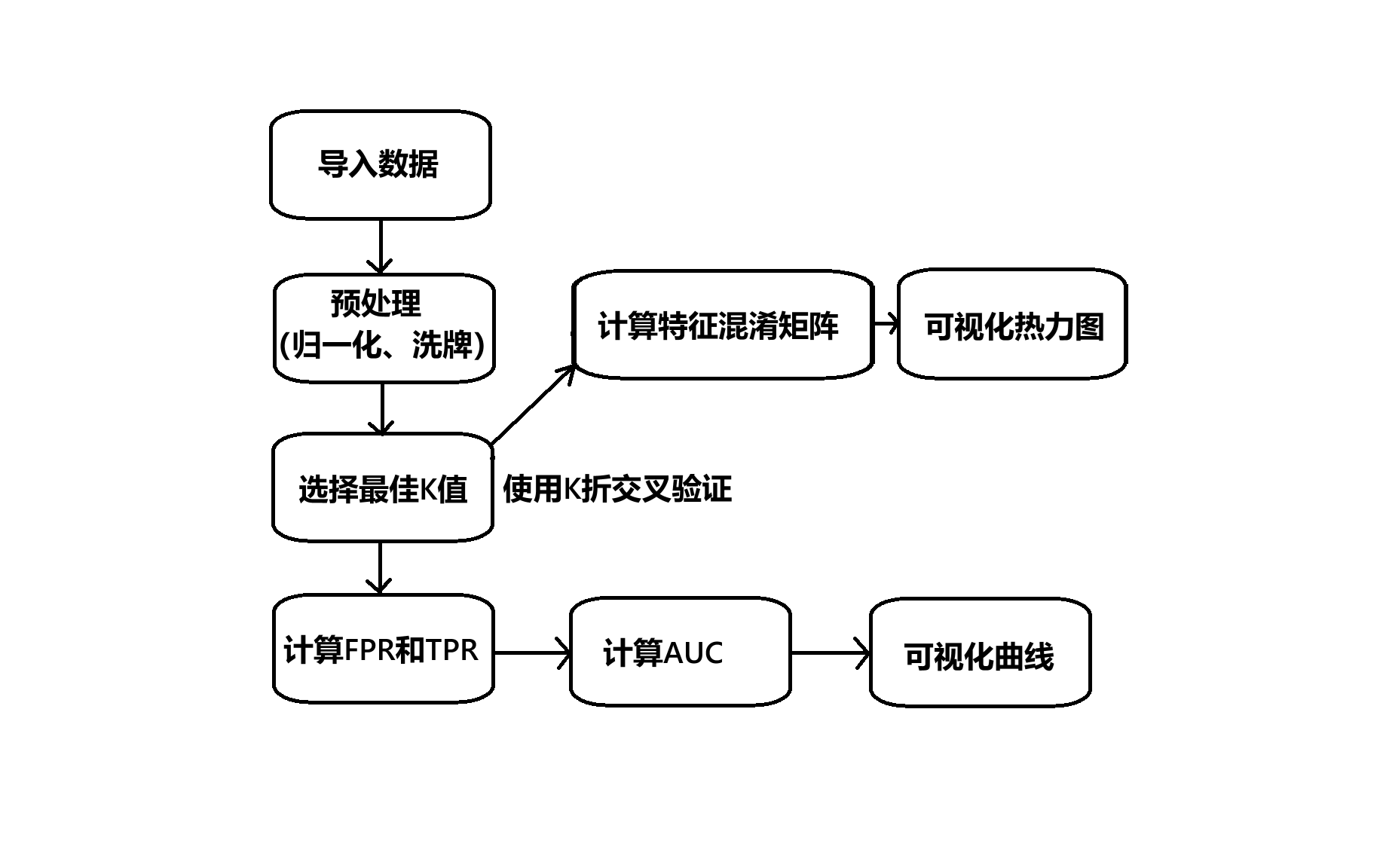
图4-2
4.3.2 实现步骤讲解
4.3.2.1 导入数据
这个是根据数据集的类型和维度数量等等决定的,前面也有具体分析了,这里就不赘述,可以看后面的代码实现部分。
4.3.2.2 预处理
归一化 :将所有数据按原范围大小,均匀压缩到0-1的范围内,如25、50、75、125,原范围25-125,对应0-1范围0、0.25、0.50、1。给出公式:
洗牌 :数据集的数据可能呈现出部分特征集中在某一特定位置,这就好比我们吃拌面时,厨师往往只负责将酱料撒在一个区域,我们需要搅拌面来让酱均匀地分布在每个地方,不然吃起来会一部分味道寡淡一部分很浓。对于数据集而言,遇到这种情况是会影响生成的模型的能力的,所以我们需要把原来的数据集打乱 ,让某些过于集中的特征分散开来,提高模型预测的准确性。
4.3.2.3 最佳K值的选择
正如前面2.2.2中说的,k的选取是很重要的,常见的选择方法有经验值法 (直接设置参数)和交叉验证法(网格搜索+交叉验证)。
网格搜索 :实际上就是穷举所有可能的情况,比较每个情况的效果(在这里是准确率),十分简单暴力,但是时间、空间开销大。
交叉验证:假设有个交叉验证是m次n折交叉验证,将数据集分成n份,从1-n份,每次一小份作为测试集,其他作为验证集,计算准确率,重复m次。
在本文的实战中,还涉及到了距离的计算,常见的距离计算有两种:欧几里得距离 和曼哈顿距离
欧几里得距离计算公式(x和y是同一特征维度的,i表示不同的特征维度):
曼哈顿距离计算公式(和上面的变量一个含义):
距离公式的选择
从公式上看,我们可以发现欧几里得距离的计算成本比较高 ,需要平方 ,而曼哈顿距离计算只有加减法和绝对值 ,而且如果我们使用欧几里得距离作为计算标准,是必须要对数据进行归一化 的;但是我们的实战数据量只有一千个多个,计算成本的影响较小 ,且我们需要全局的评估,欧几里得距离的"全局相似性"表达更好,所以选择欧几里得距离
4.3.2.4 计算FPR和TPR、AUC并可视化ROC曲线
前面提到过,这里就不展开了。
4.3.2.5 计算特征混淆矩阵并可视化热力图(可选)
这一步主要是查看我们的分类器模型分类的结果,使用热力图直观地查看结果,方便我们优化程序。特征混淆矩阵,是基于特征预测的类别和实际类别进行分类。就像下面的这张表
|----------------|----------------|----------------|---------------|
| | largeDoses(实际) | smallDoses(实际) | didntLike(实际) |
| largeDoses(预测) | | | |
| smallDoses(预测) | | | |
| didntLike(预测) | | | |
五、C++实现
5.1 环境准备
我们只需要一个额外的第三方库,C++社区有很多可视化第三方库,这里我们选择matplot++
5.1.1 环境选择和参考文献
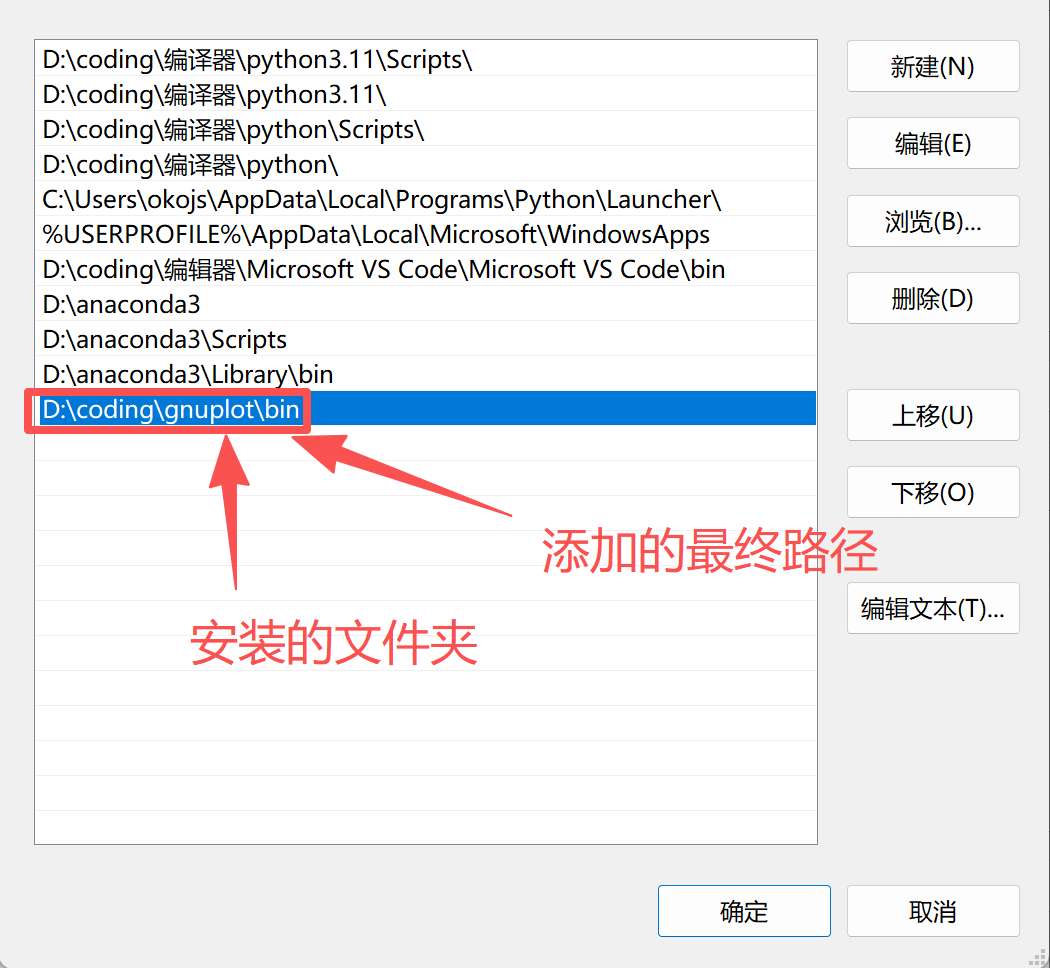
5.1.1.1 gnuplot下载
官方链接:我选择的是5.4.6版本的,和我版本不一样可能有些代码会报错
需要添加环境变量,上一篇文章有提到过,这里不赘述了,添加下图圈起来的那行就可以了,不要直接抄,除非你和我安的地方一样。添加这一行是为了能正常使用matplot++
验证:在终端输入gnuplot,出现下面的情况就添加成功了
bash
gnuplot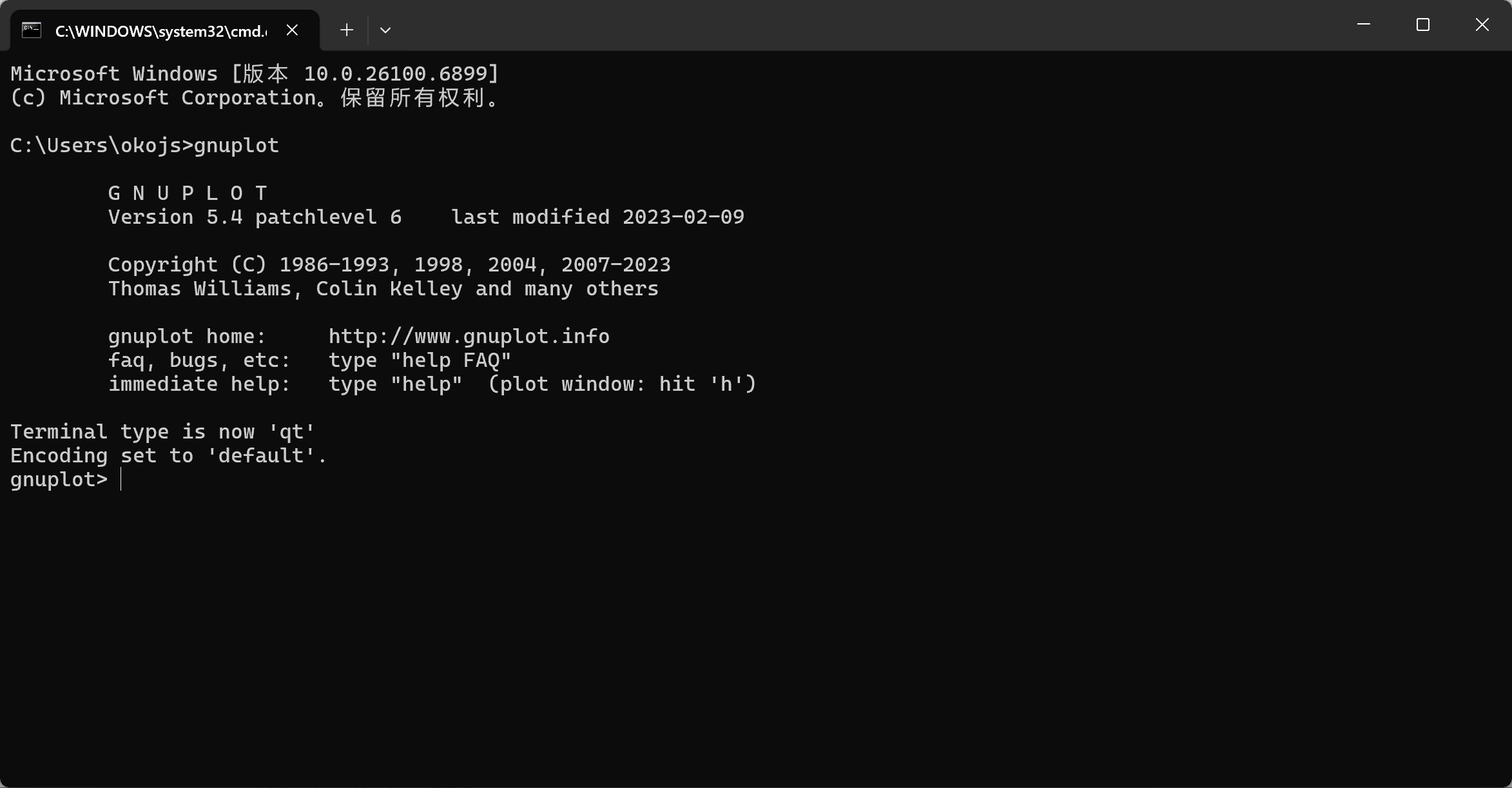
5.1.1.2 matplot++下载
官方链接:matplot++发行版,由于下面的两个参考文献是直接引用发行版的静态库的,所以我只能选择1.2.0版本的,gnup也降到发行这个版本之前的版本
5.1.1.3 参考文献
5.1.2 VS2022环境搭建
5.1.2.1 文件管理
我把matplot++放到了我建立的解决方案的其中一个项目的目录下
E:\code\CML\KNN_Project1\KNN_Project1\vendor\Matplot++ 1.2.0
5.1.2.2 配置调整
下面直接放我的配置,tips:一定要把配置改成release,不然会报错
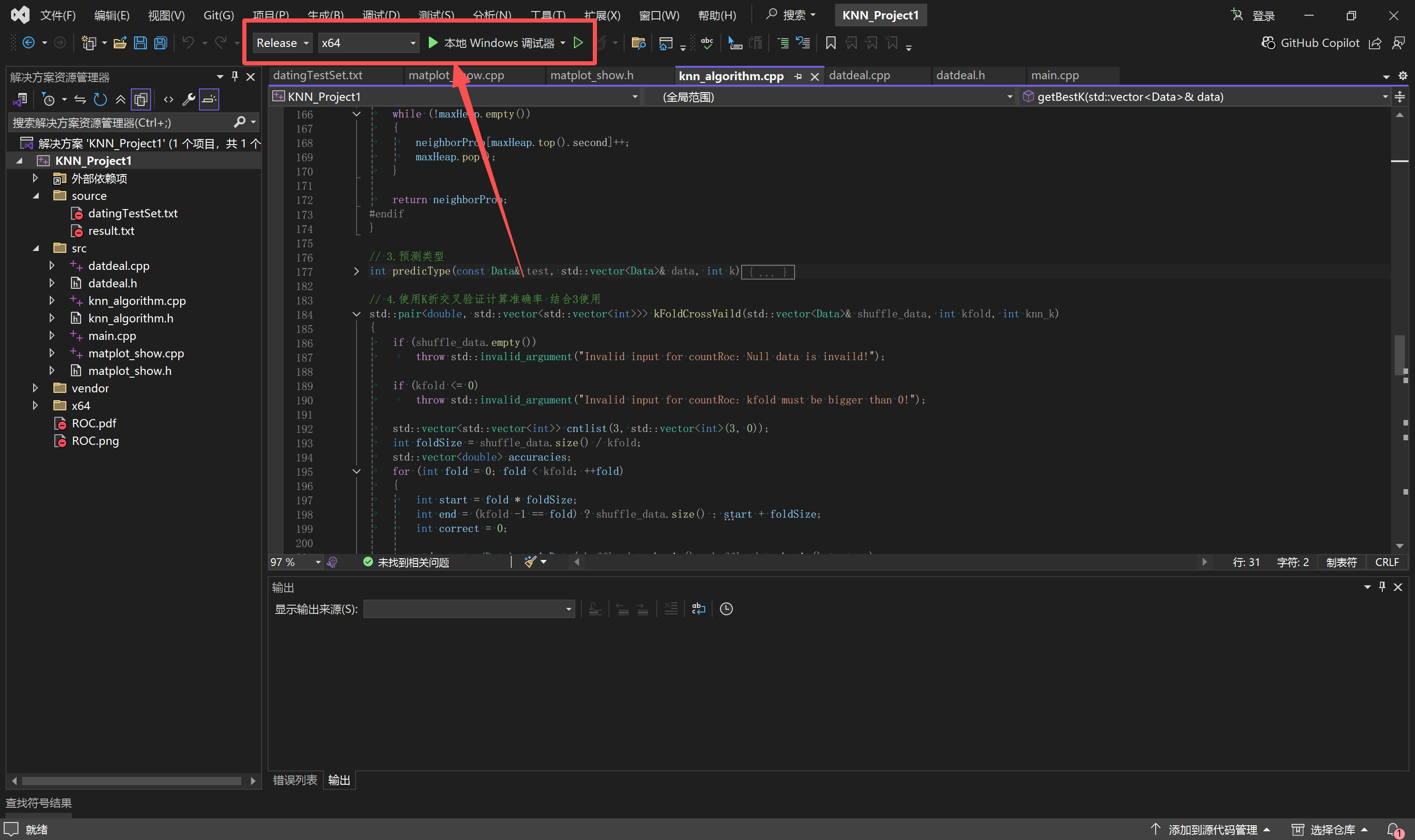
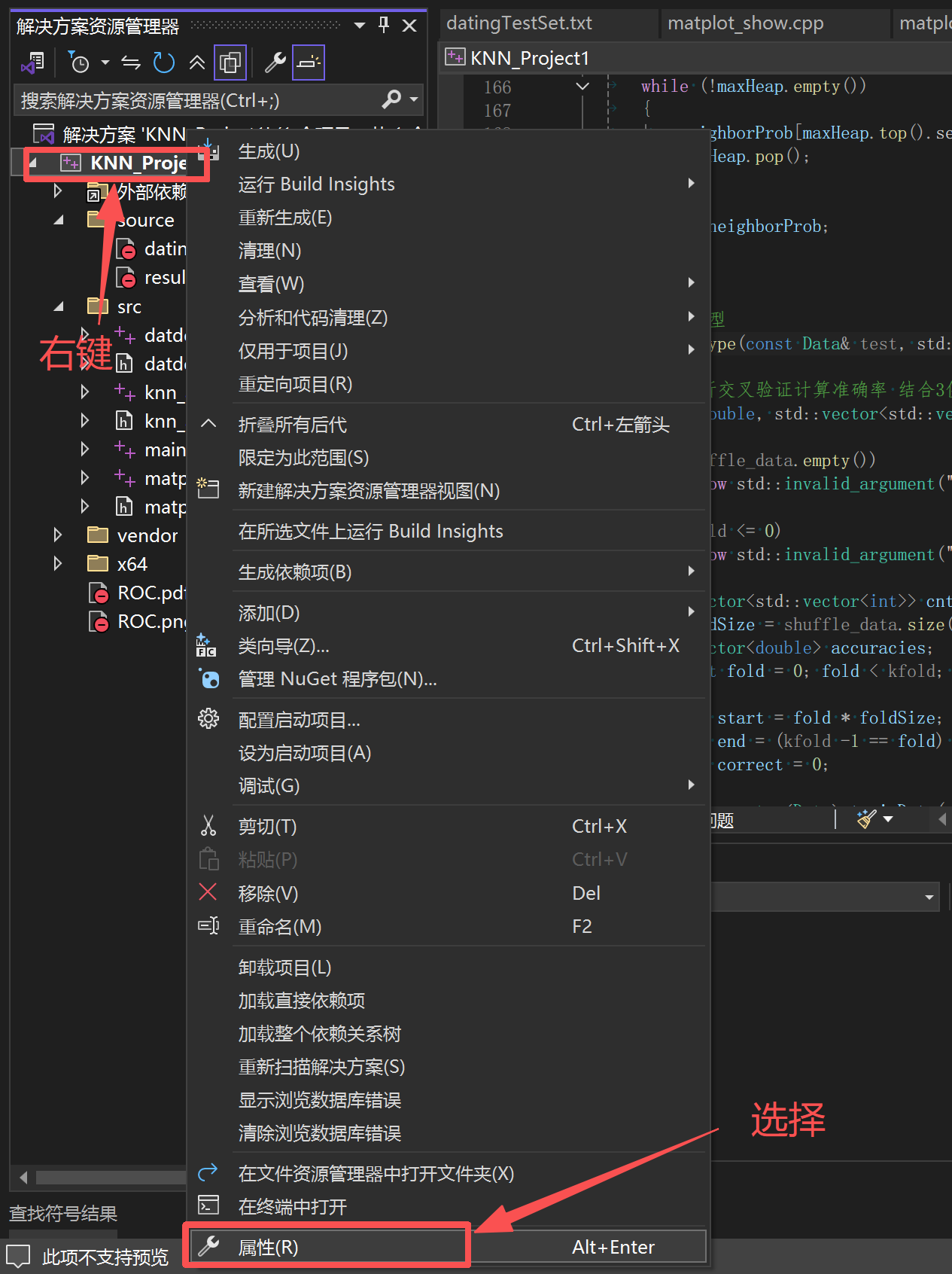
右键项目,选择"属性"
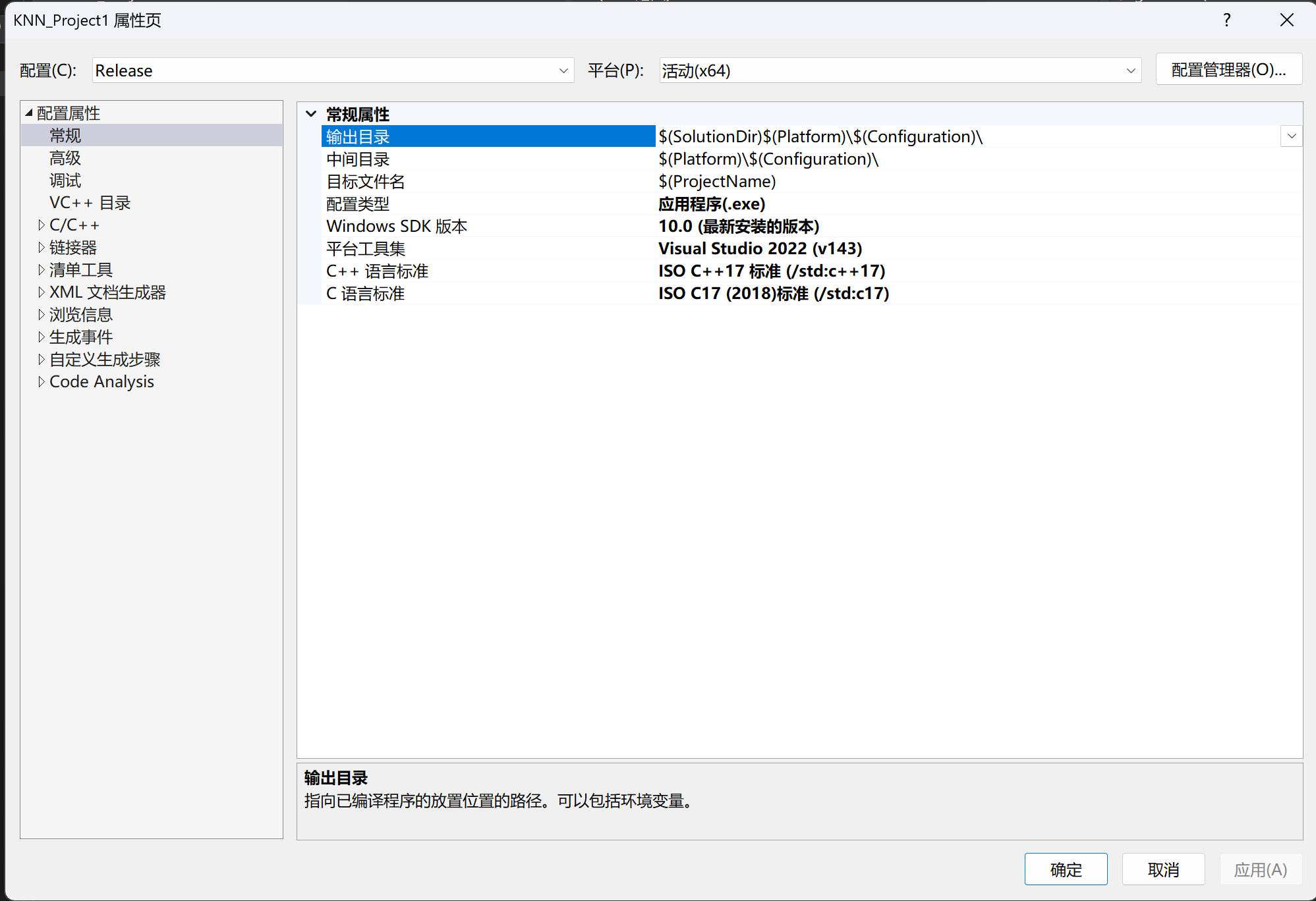
接下来一系列的配置图片,路径是跟着解决方案的,只要把本文上的项目修改你自己命名的项目名即可使用
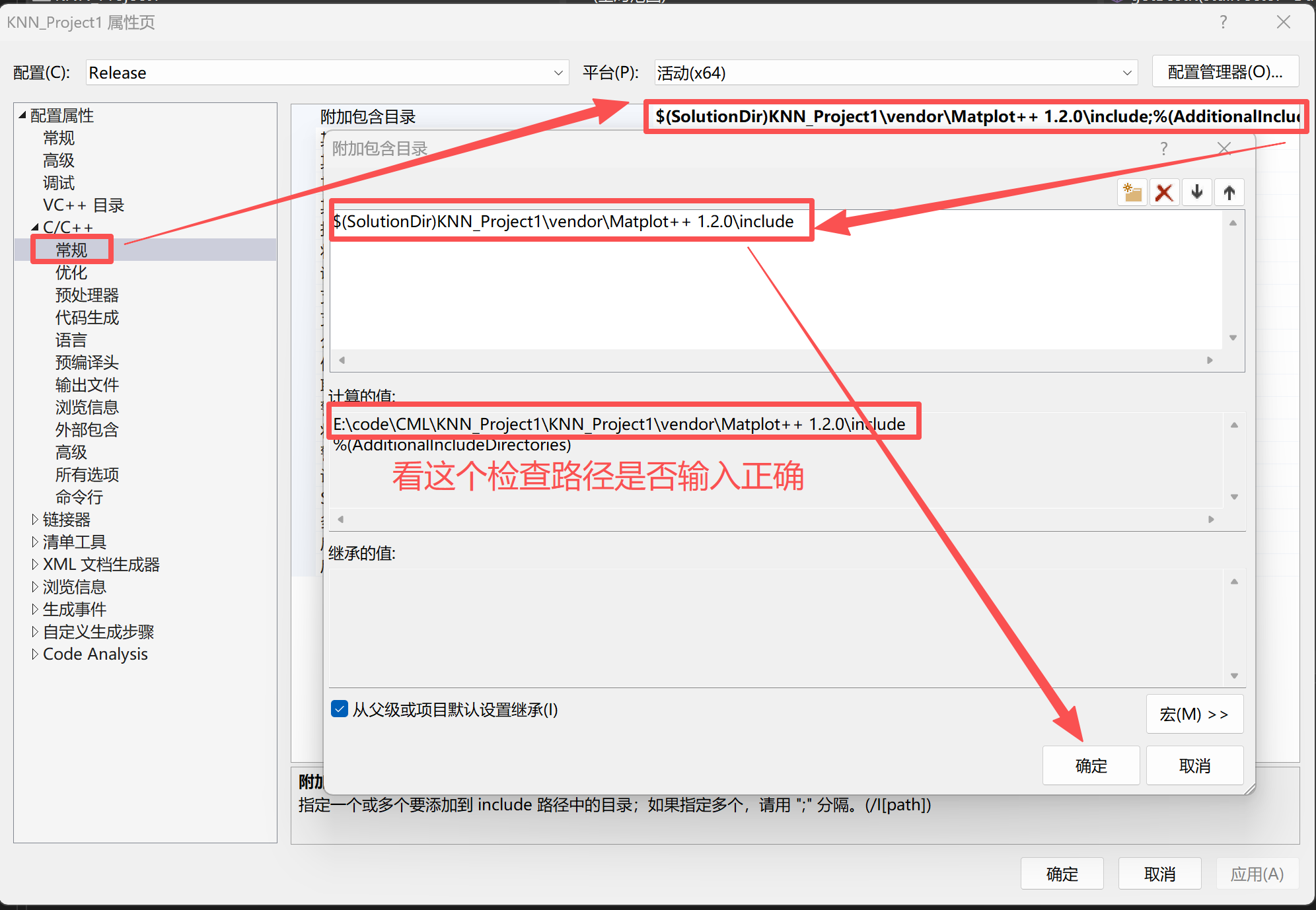
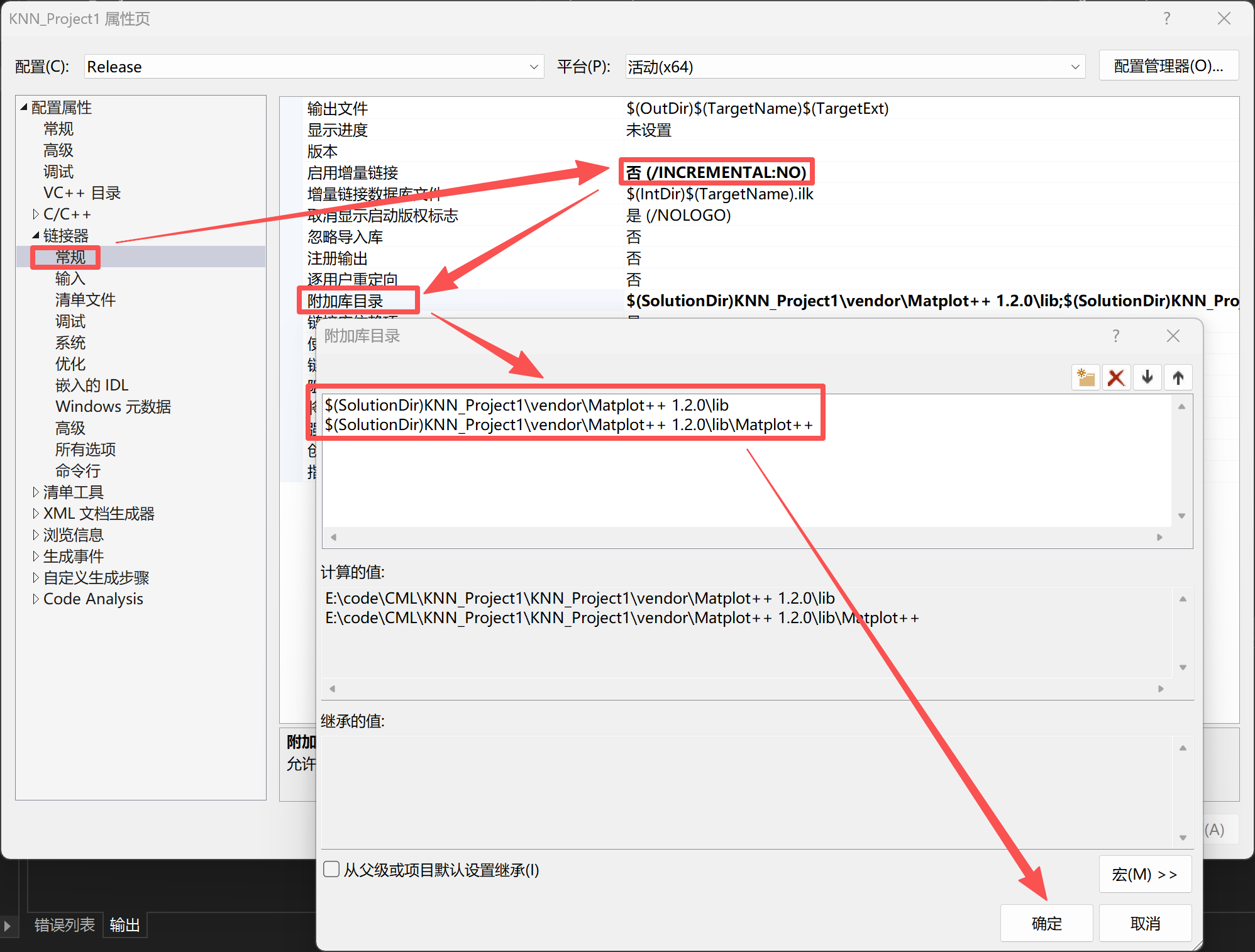
附加包含目录有个选框,选择"编辑"就得到最上层的这个窗口,记得点击确认保存,下面出现这样的图片同理
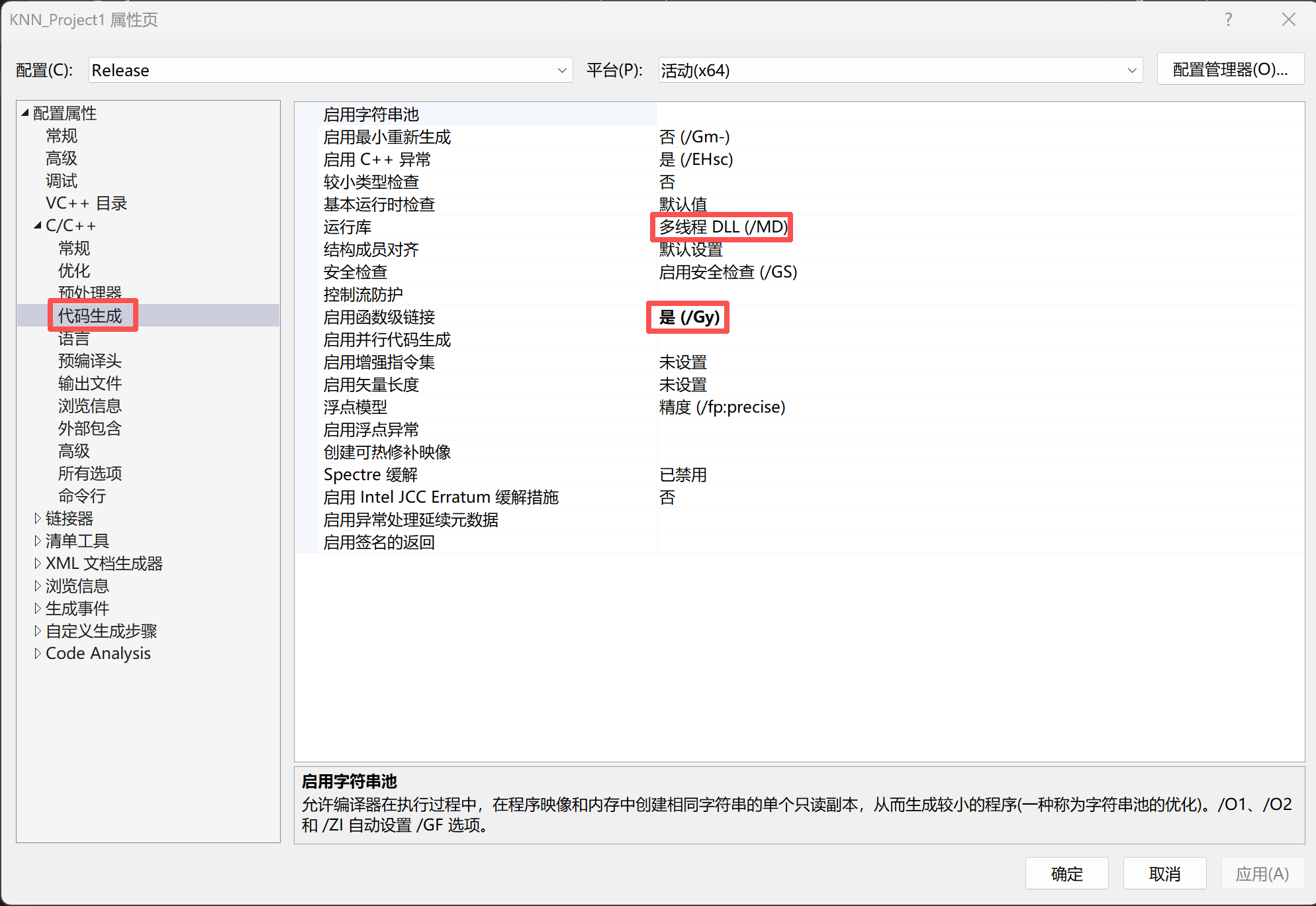
matplot++的两个静态库,可根据实际位置调整,一般都是一个在lib里,一个在lib\Matplot++里。在链接器中链接:
nodesoup.lib
matplot.lib
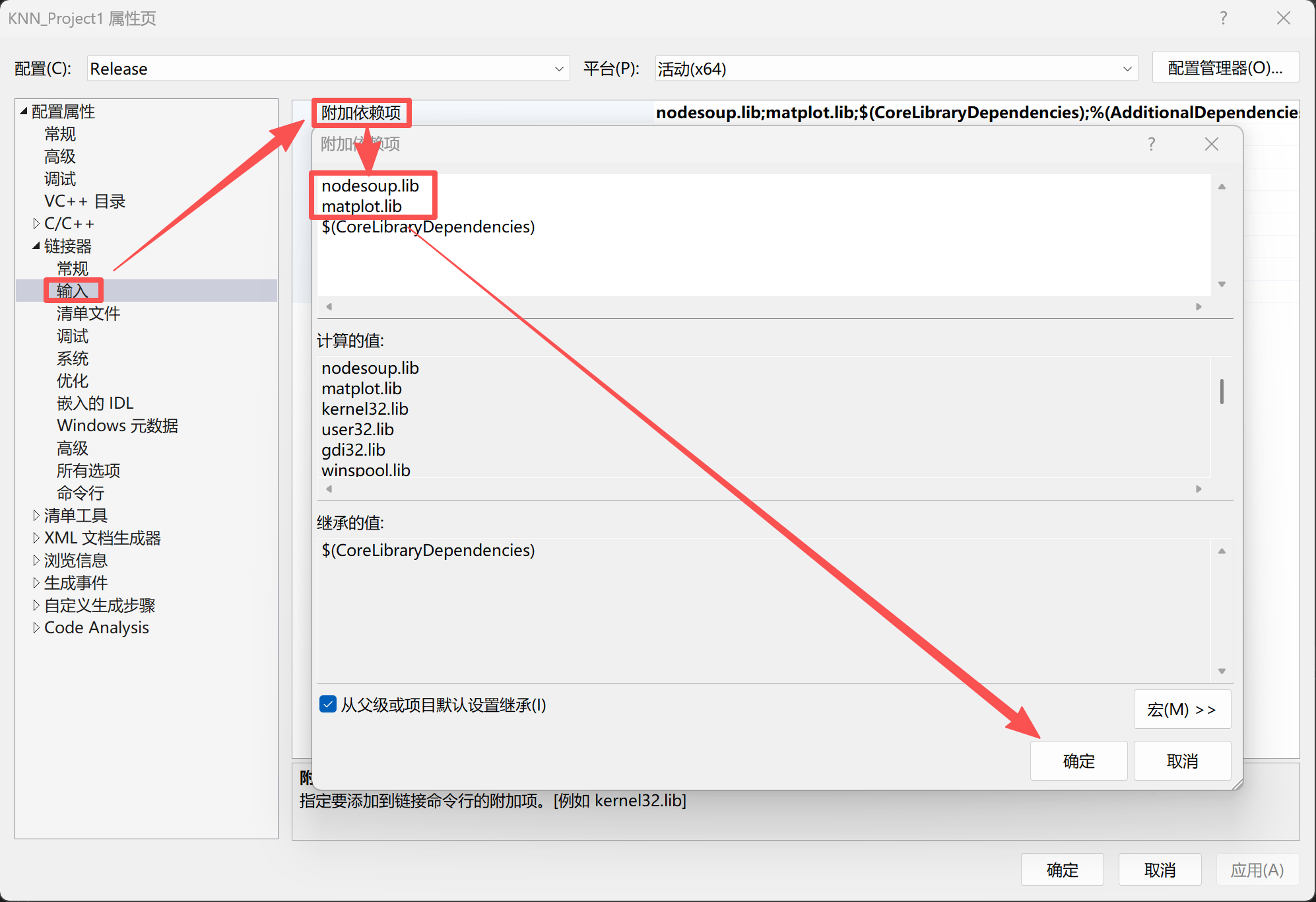
到这里配置完毕
5.1.2.3 premake配置(可以代替5.1.2.2)
可以使用别人写好的premake5.exe文件执行lua文件,帮助我们快速稳定的配置,内容比较多,这里就不展开讲了,有兴趣的读者可以自己去研究一下。
5.2 代码实现
5.2.1 使用的头文件
cpp
#include <iostream>
#include <fstream>
#include <vector>
#include <memory>
#include <functional>
#include <algorithm>
#include <unordered_map>
#include <random>
#include <numeric>
#include <queue>
#include <matplot/matplot.h>tips:不要使用using namespace std; ,因为matplot.h里面也有std作用域,会起冲突。
5.2.2 使用结构体
C++里面也有类,但是这个项目太小了,而且因为C语言太底层了,所以被迫使用C++来写,用STL来加速实现,更主要的是,它是从汇编层面优化的速度,就算小编把C语言和数据结构、算法利用到极限,也很难比拟,所以只能使用C++了。
cpp
struct Data
{
// 为什么不用vector<double>,KNN算法需要频繁访问内存的,使用vector管理反而更慢
double length;
double game_time;
double ice_crime_eating;
int type;
};Data结构体的前三个成员均为double类型,为什么不用vector管理呢?
vector是将数据分散存储到堆区,类似链表结构体,到时候我们需要频繁地访问这些数据 ,需要不停使用指针访问内存,会让访问效率下降。
5.2.3 导入数据
cpp
std::vector<Data> loadData(const std::string& filepath)
{
std::ifstream ifs;
ifs.open(filepath, std::ios::in);
if (!ifs.is_open())
throw std::invalid_argument("Failed to open file: " + filepath);
std::vector<Data> datalist;
double trail, game, eating;
std::string tag;
std::vector<std::string> searchlist =
{
"largeDoses",
"smallDoses",
"didntLike"
};
while (ifs >> trail >> game >> eating >> tag)
{
int type = -1;
for (int i = 0; i < searchlist.size(); ++i)
{
if (searchlist[i] == tag)
{
type = i;
break;
}
}
datalist.push_back({ trail, game, eating, type });
}
ifs.close();
return datalist;
}上文说过,匹配类别对应的字符串,转换成整型数据管理。
5.2.4 预处理
5.2.4.1 归一化
cpp
// 更新归一化数据
void calculate(std::vector<double>& feature)
{
double max = *max_element(feature.begin(), feature.end());
double min = *min_element(feature.begin(), feature.end());
double range = max - min;
for (double& val : feature)
val = (val - min) / range;
}
// 归一化
void normalized(std::vector<Data>& data)
{
if (data.empty())
{
std::cout << "nullptr doesn't normalized!" << std::endl;
__debugbreak();
return;
}
std::vector<std::pair<
std::function<double(const Data&)>,
std::function<void(Data&, double)>
>> field =
{
{
[](const Data& d) {return d.game_time; },
[](Data& d, double val) {d.game_time = val; }
},
{
[](const Data& d) {return d.ice_crime_eating; },
[](Data& d, double val) {d.ice_crime_eating = val; }
},
{
[](const Data& d) {return d.length; },
[](Data& d, double val) {d.length = val; }
}
};
for (auto& f : field)
{
auto& getVal = f.first;
auto& setVal = f.second;
std::vector<double> values;
for (const auto& d : data)
values.push_back(getVal(d));
calculate(values);
for (int i = 0; i < data.size(); ++i)
setVal(data[i], values[i]);
}
}这里是使用了lamda来简化三个特征维度的归一化实现。
5.2.4.2 洗牌
cpp
// 打乱数据
std::vector<Data> shuffleData(std::vector<Data>& data)
{
auto shuffle_data = std::vector<Data>(data.begin(), data.end());
std::random_device rd;
std::mt19937 g(rd());
std::shuffle(shuffle_data.begin(), shuffle_data.end(), g);
return shuffle_data;
}随机生成伪随机数种子,使用shuffle洗牌。
5.2.5 选择最佳k值
5.2.5.1 计算欧几里得距离
cpp
// 计算欧几里得距离
double eucliDistance(Data x, Data y)
{
double trail = x.length - y.length;
double play = x.game_time - y.game_time;
double eating = x.ice_crime_eating - y.ice_crime_eating;
return trail * trail + play * play + eating * eating;
}5.2.5.2 获取邻居各类别的数量
cpp
std::vector<int> getKNeighborProb(const Data& test, const std::vector<Data>& trains, int k)
{
if (trains.empty() || k <= 0)
throw std::invalid_argument("Invalid input for getNeighborProb!");
std::priority_queue<std::pair<double, int>> maxHeap; // 使用最大堆存储
for (const auto& d : trains)
{
double dist = eucliDistance(test, d);
if (maxHeap.size() < k)
maxHeap.emplace(dist, d.type);
else if (maxHeap.top().first > dist)
{
maxHeap.pop();
maxHeap.emplace(dist, d.type);
}
}
std::vector<int> neighborProb(3, 0);
while (!maxHeap.empty())
{
neighborProb[maxHeap.top().second]++;
maxHeap.pop();
}
return neighborProb;
}由于最大的k个邻居与他们的位置无关 ,我们只需要使用最大堆 把最大的k个邻居和它们的类别存起来,统计最大堆前k个最大邻居出现的类别的数量即可。这里的neighborProb的下标还藏着类别的信息,所以直接算对应下标对应的数量,就能达到目的。
5.2.5.3 选择出现最多的类别作为预测结果
cpp
// 预测类型
int predicType(const Data& test, std::vector<Data>& data, int k)
{
auto vote = getKNeighborProb(test, data, k);
return max_element(vote.begin(), vote.end()) - vote.begin();
}找到最大值的下标,减去最小的下标算出偏移量
5.2.5.4 使用k折交叉验证计算准确率和三分类混淆矩阵
cpp
// 使用K折交叉验证计算准确率
std::pair<double, std::vector<std::vector<int>>> kFoldCrossVaild(std::vector<Data>& shuffle_data, int kfold, int knn_k)
{
if (shuffle_data.empty())
throw std::invalid_argument("Invalid input for countRoc: Null data is invaild!");
if (kfold <= 0)
throw std::invalid_argument("Invalid input for countRoc: kfold must be bigger than 0!");
std::vector<std::vector<int>> cntlist(3, std::vector<int>(3, 0));
int foldSize = shuffle_data.size() / kfold;
std::vector<double> accuracies;
for (int fold = 0; fold < kfold; ++fold)
{
int start = fold * foldSize;
int end = (kfold -1 == fold) ? shuffle_data.size() : start + foldSize;
int correct = 0;
std::vector<Data> trainData(shuffle_data.begin(), shuffle_data.begin() + start);
trainData.insert(trainData.end(), shuffle_data.begin() + end, shuffle_data.end());
for(int i = start; i < end; ++i)
{
auto t = shuffle_data[i];
int res = predicType(t, trainData, knn_k);
cntlist[t.type][res]++;
correct += (res == t.type);
}
double accuracy = static_cast<double>(correct) / foldSize;
accuracies.push_back(accuracy);
}
return std::make_pair(std::accumulate(accuracies.begin(), accuracies.end(), 0.0) / kfold , cntlist);
}统计正确被预测的测试集数量,除以总量获得准确率
5.2.5.5 网格搜索
cpp
// 获取最佳的K值
std::pair<int, std::vector<std::vector<int>>> getBestK(std::vector<Data>& data)
{
if (data.empty())
throw std::invalid_argument("Invalid input for getBestK: data is null");
std::vector<double> k;
std::vector<std::vector<std::vector<int>>> lst;
for (int i = 3; i < sqrt(data.size()); i += 2)
{
auto [res, list] = kFoldCrossVaild(data, 10, i);
k.push_back(res);
lst.push_back(list);
}
int offset = max_element(k.begin(), k.end()) - k.begin();
int knn_k = offset * 2 + 3;
std::cout << "k = " << knn_k << " accuracy = " << k[offset] << std::endl;
return std::make_pair(knn_k, lst[offset]);
}从3开始,跳过偶数,偶数可能会平票,所以步长为2,取数据集总量的开方,减少不必要的计算成本。将得到的准确率和混淆矩阵存起来(被迫的空间开销),跑完网格搜素后寻找最大的准确率,换算k值,返回k和混淆矩阵。
5.2.6 计算FPR和TPR
5.2.6.1 将多类型数量转换为概率
cpp
// 计算测试集在训练集上的多类型概率
std::vector<double> predicProb(const Data& test, std::vector<Data>& data, int k)
{
auto vote = getKNeighborProb(test, data, k);
std::vector<double> appearance(3, 0);
for (int i = 0; i < appearance.size(); ++i)
appearance[i] = static_cast<double>(vote[i]) / k;
return appearance;
}遍历vector容器,将所有数据除以k
5.2.6.2 计算某一类型作为正例时单个点的FPR和TPR
cpp
// 使用K折交叉验证,计算ROC图数据
std::pair<double, double> countRoc(std::vector<Data>& shuffle_data, int kfold, int knn_k, double confd, int genre)
{
if (shuffle_data.empty())
throw std::invalid_argument("Invalid input for countRoc: Null data is invaild!");
if (kfold <= 0)
throw std::invalid_argument("Invalid input for countRoc: kfold must be bigger than 0!");
int foldSize = shuffle_data.size() / kfold;
int TP = 0, FP = 0, FN = 0, TN = 0;
for (int fold = 0; fold < kfold; ++fold)
{
int start = fold * foldSize;
int end = (kfold - 1 == fold) ? shuffle_data.size() : start + foldSize;
int correct = 0;
std::vector<Data> trainData;
trainData.reserve(shuffle_data.size() - foldSize);
trainData.assign(shuffle_data.begin(), shuffle_data.begin() + start);
trainData.insert(trainData.end(), shuffle_data.begin() + end, shuffle_data.end());
for (int i = start; i < end; ++i)
{
auto t = shuffle_data[i];
std::vector<double> res = predicProb(t, trainData, knn_k);
bool isPred = (res[genre] >= confd);
bool isTrue = (genre == t.type);
TP += isPred && isTrue;
FP += isPred && (!isTrue);
FN += (!isPred) && isTrue;
TN += (!isPred) && (!isTrue);
}
}
double TPR = ( TP+FN == 0 ? 0.0 : static_cast<double>(TP) / (TP + FN));
double FPR = ( FP+TN == 0 ? 0.0 : static_cast<double>(FP) / (FP + TN));
return { TPR, FPR };
}5.2.6.3 将某一类别所有点数据整理补全起来
cpp
// 组织ROC图数据并补全
std::pair<std::vector<double>, std::vector<double>> getROC(std::vector<Data>& data, int kfold, int knn_k, int genre)
{
std::vector<double> tprlist;
std::vector<double> fprlist;
for (double confd = 1.0; confd > 0; confd -= 0.05)
{
auto [tpr, fpr] = countRoc(data, kfold, knn_k, confd, genre);
tprlist.push_back(tpr);
fprlist.push_back(fpr);
}
if (!(tprlist.front() == 0 && fprlist.front() == 0))
{
tprlist.insert(tprlist.begin(), 0);
fprlist.insert(fprlist.begin(), 0);
}
if (!(tprlist.back() == 1 && fprlist.back() == 1))
{
tprlist.push_back(1);
fprlist.push_back(1);
}
return { fprlist, tprlist };
}为什么需要补全?
可能出现FPR不为0和不为1的情况,这样面积就可能会少算一部分(最小FPR的左边区域和最大FPR的右边区域)。
5.2.7 计算AUC
cpp
// 累加AUC得到最终值 结合8使用 data十分有序,无需处理即可使用
double getAUC(std::pair<std::vector<double>, std::vector<double>>& data)
{
double auc = 0.0;
auto& fprs = data.first;
auto& tprs = data.second;
for (int i = 0; i < fprs.size()-1; ++i)
{
auc += (fprs[i + 1] - fprs[i]) * (tprs[i + 1] + tprs[i]) / 2;
}
std::cout << auc << std::endl;
return auc;
}由于我们的getROC函数输入了一连串单向降低的置信度,所以得到的点集是有序的,无需担心不是FPR轴相近的两个点算AUC,且置信度从1到0的过程中,FPR和TPR都是单调递增的,公式不用取绝对值。
5.2.8 可视化
cpp
void plotEvalution(std::vector<std::pair<std::vector<double>, std::vector<double>>> data, std::vector<double> aucs, std::vector<std::vector<int>>& list)
{
using namespace matplot;
std::vector<std::string> colorList({ "blue", "yellow", "green", "red" });
std::vector<std::string> tagName({ "largeDoses", "smallDoses", "didntLike", "Random Guess" });
auto fig = figure(true); // 设置为true是能正常使用figure的关键
fig->size(2560, 1000);
subplot(1, 2, 1);
hold(on);
for (int i = 0; i < data.size(); ++i)
{
plot(data[i].first, data[i].second)->line_width(2).line_style("-").color(colorList[i]);
}
plot(std::vector{ 0,1 }, std::vector{ 0,1 })->line_width(1).line_style("--").color(colorList[3]);
hold(off);
xlabel("False Positive Rate");
ylabel("True Positive Rate");
title("ROC");
xlim({ 0, 1 });
ylim({ 0, 1 });
for (int i = 0; i < aucs.size(); ++i)
text(0.02, 0.1 - i * 0.025, tagName[i] + " AUC: " + std::to_string(aucs[i]))->font_size(8);
auto l = ::matplot::legend(tagName);
l->location(legend::general_alignment::bottomright);
l->num_rows(2);
l->font_size(5);
subplot(1, 2, 2);
heatmap(list)->normalization(matrix::color_normalization::columns);
title("Three distribution");
auto ax = gca();
ax->x_axis().ticklabels({ "largeDoses", "smallDoses" , "didntLike" });
ax->y_axis().ticklabels({ "largeDoses", "smallDoses" , "didntLike" });
ax->x_axis().label_font_size(5);
ax->y_axis().label_font_size(5);
//save("ROC.png");
show();
}suplot(1, 2, 1)下面的是ROC曲线可视化
suplot(1, 2, 2)下面的是热力图可视化
我就不详细讲解matplot++函数的使用了。可参考官网
5.2.9 mian函数调用
cpp
int main()
{
auto data = loadData("source\\datingTestSet.txt");
normalized(data);
auto shuffle_Data = shuffleData(data);
auto [best_k, list] = getBestK(data);
std::vector<std::pair<std::vector<double>, std::vector<double>>> results;
std::vector<double> AUCs;
for (int i = 0; i < 3; ++i)
{
auto res = getROC(shuffle_Data, 10, best_k, i);
auto auc = getAUC(res);
results.push_back(res);
AUCs.push_back(auc);
}
plotEvalution(results, AUCs, list);
return 0;
}这里有三个类别,也就是可以有三个模型,需要使用循环生成评估数据。
5.3 运行结果展示

六、Python实现
Python的可视化明显比C++第三方库好用多了,我没一两个小时就研究出来怎么可视化了
而且配置环境也简单很多
6.1 环境准备
6.1.1 在虚拟环境中配置环境
在你的新的虚拟环境中,安装numpy和matplotlib
bash
conda install numpy
conda install matplotlib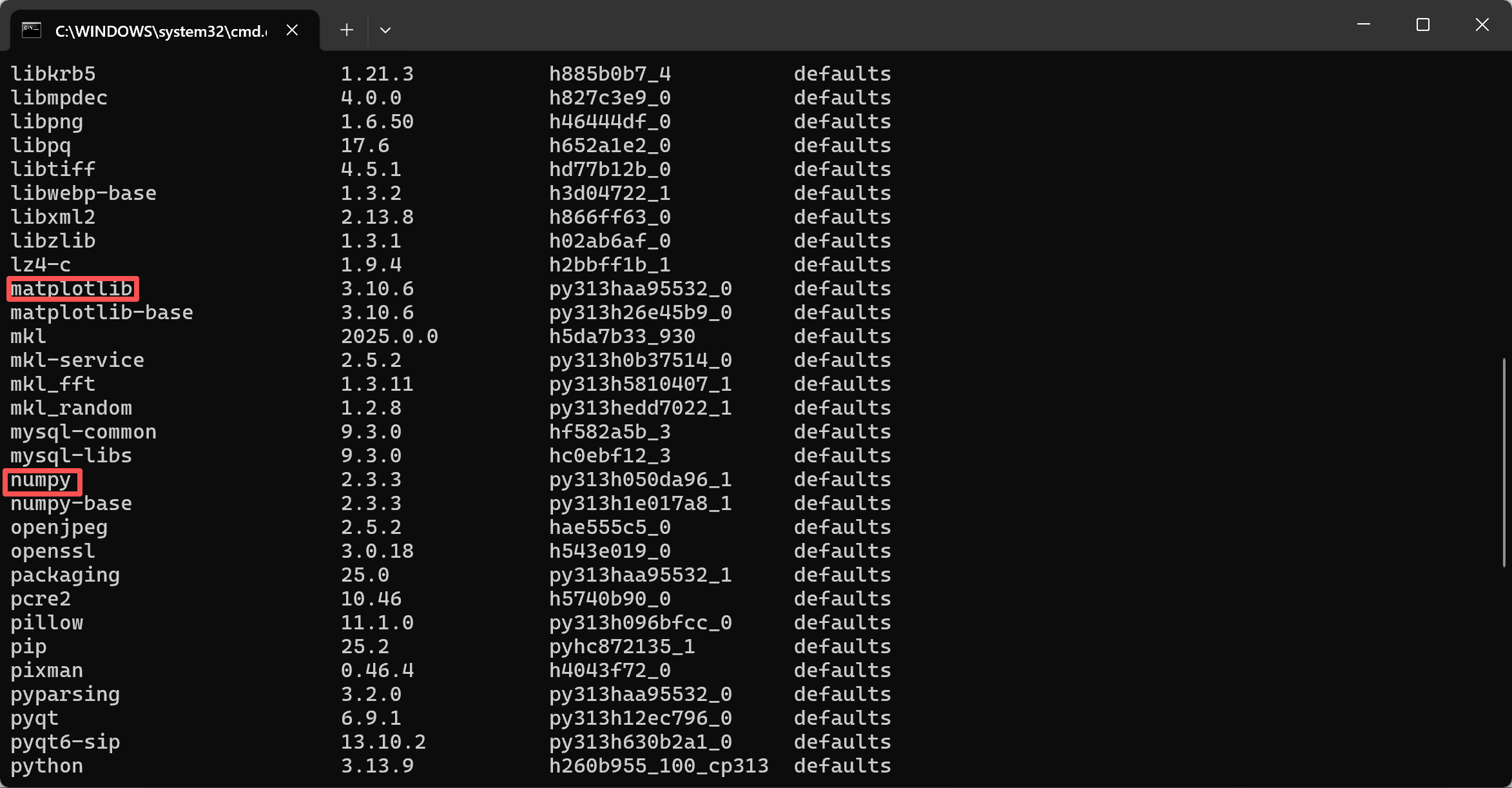
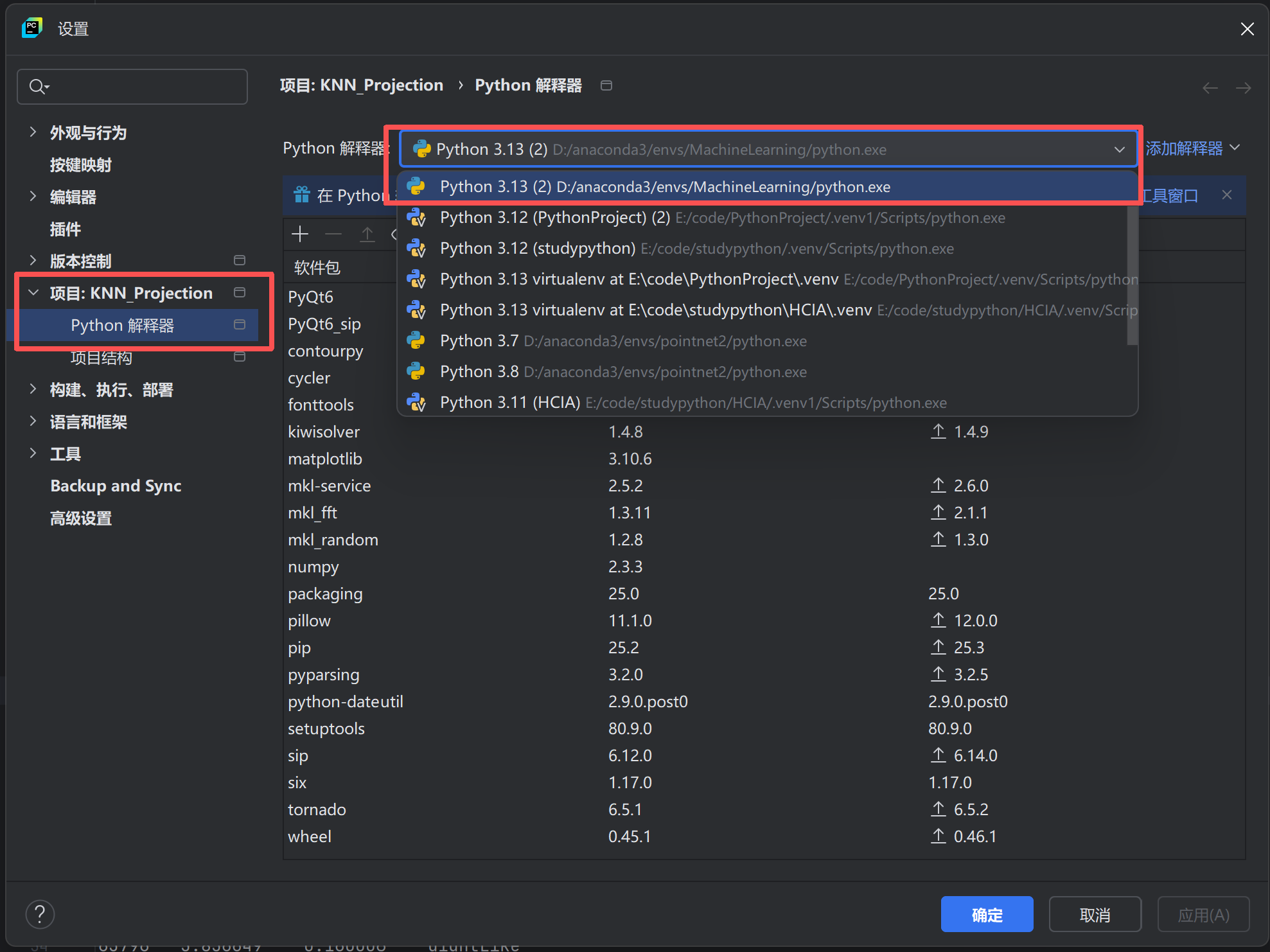
6.1.2 配置Pycharm
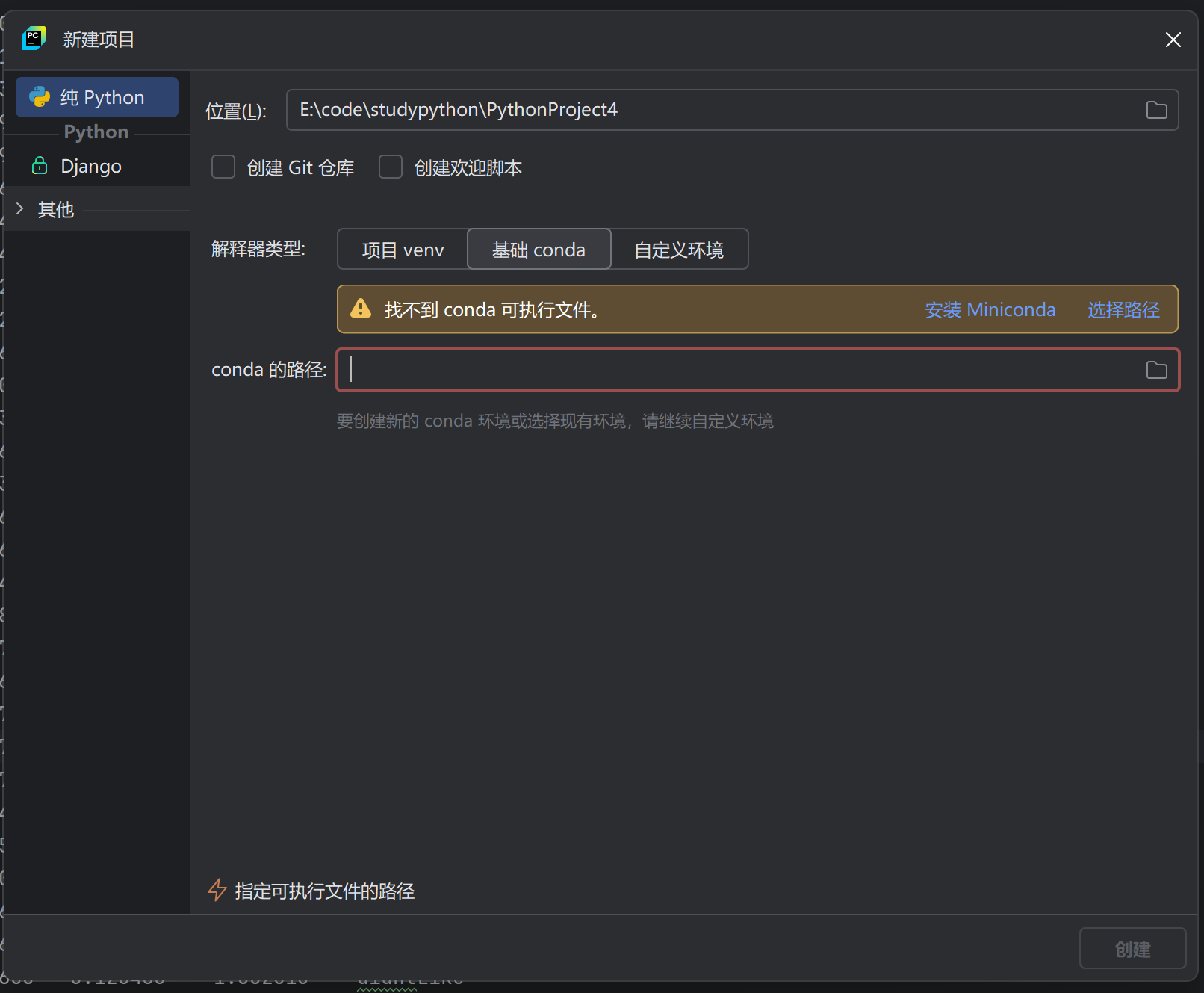
创建时选择conda环境,到你的anaconda的文件夹中找到虚拟环境对应的python.exe
6.2 代码实现
python
import numpy as np
import matplotlib.pyplot as plt
tag_map = {
"largeDoses": 0,
"smallDoses": 1,
"didntLike": 2
}
# 导入数据
def load_data(filepath):
# 读取数据
data = []
with open(filepath, 'r', encoding="utf-8") as f:
for line in f:
line = line.strip()
if not line:
continue
parts = line.split('\t')
if len(parts) != 4:
print(f"特征数据无法转换:{line}")
continue
tag = parts[3]
data.append({
"feature": [parts[0], parts[1], parts[2]],
"tag": tag_map[tag]
})
return data
# 归一化 利用numpy的广播机制
def normalized(features: np.ndarray):
# 获取每一列的最大值和最小值
max_val = features.max(axis=0)
min_val = features.min(axis=0)
ranges = max_val-min_val
ranges[ranges < 1e-9] = 1.0 # 比较每个列的相减结果,排除0的情况
return (features-min_val)/ranges
# 计算欧式距离
def euclidean_dist(test, train):
return np.sum((test - train) ** 2, axis=1)
# 计算各类标签的概率
def predict_prob(test, train_data, k):
train_features = train_data[:,:3]
dist = euclidean_dist(test, train_features)
k_indices = np.argpartition(dist, k)[:k] # 完成一次快速排序
k_tags = train_data[k_indices, 3].astype(int)
prob = np.bincount(k_tags, minlength=3) / k
return prob
# 选择最大概率作为当前测试样本的预测类型
def predict_type(test, train_data, k):
return max(enumerate(predict_prob(test, train_data, k)), key=lambda x:x[1])[0]
# 使用k折交叉验证,计算准确率和三分类特征混淆矩阵
def k_folds_cross_valid_acc(features: np.ndarray, k, k_fold):
# 计算每一折的大小
fold_size = int(len(features)/k_fold)
fold_accuracies = 0.0
confusion_mat = np.zeros([3,3], dtype=np.int32)
for i in range(k_fold):
start = i*fold_size
# 防止最后一折不够一折的大小
end = start+fold_size if i != k_fold-1 else len(features)
train_data = np.concatenate([features[:start], features[end:]])
correct = 0
test_data = features[start:end]
for t in test_data:
pred_type = predict_type(t[:3], train_data, k)
if pred_type == t[3]:
correct += 1
confusion_mat[int(t[3])][pred_type] += 1
fold_accuracies += correct/fold_size
return fold_accuracies/k_fold, confusion_mat
# 计算模型roc曲线的单个点
def count_roc(features: np.ndarray, k_fold, k_neighbor, confidence, genre):
fold_size = int(len(features)/k_fold)
tp, tn, fp, fn = 0, 0, 0, 0
for i in range(k_fold):
start = i*fold_size
end = start+fold_size if i != k_fold-1 else len(features)
train_data = np.concatenate([features[:start], features[end:]])
test_data = features[start:end]
for t in test_data:
prob = predict_prob(t[:3], train_data, k_neighbor)
if genre == t[3] and prob[genre] >= confidence:
tp += 1
elif genre != t[3] and prob[genre] < confidence:
tn += 1
elif genre != t[3] and prob[genre] >= confidence:
fp += 1
elif genre == t[3] and prob[genre] < confidence:
fn += 1
tpr = tp / (tp+fn) if (tp+fn) else 0.0
fpr = fp / (fp+tn) if (fp+tn) else 0.0
return fpr, tpr
# 整理并补全roc曲线的两个点集
def get_roc(features: np.ndarray, k_fold, k_neighbor, genre):
# 生成1到0步长为-0.05的列表
confidence = np.arange(1.0, 0, -0.05)
fpr_list = list()
tpr_list = list()
for conf in confidence:
fpr, tpr = count_roc(features, k_fold, k_neighbor, conf, genre)
fpr_list.append(fpr)
tpr_list.append(tpr)
if fpr_list[0] != 0.0:
fpr_list.insert(0, 0.0)
tpr_list.insert(0, 0.0)
if fpr_list[len(fpr_list)-1] != 1.0:
fpr_list.append(1.0)
tpr_list.append(1.0)
return [fpr_list, tpr_list]
# 获取AUC
def get_auc(result):
auc = 0.0
fpr_list, tpr_list = result
if len(fpr_list) < 2:
return 0.0
for i in range(len(fpr_list)-1):
# 梯形法算AUC面积
auc += (fpr_list[i+1]-fpr_list[i])*(tpr_list[i]+tpr_list[i+1])/2
return auc
# 通过值寻找键列表
def get_value(dictionary: dict, target_value: int):
return [key for key, value in dictionary.items() if value == target_value]
# 绘制roc曲线
def plot_roc(results, ax):
class_names = list(tag_map.keys())
for i in range(len(results)):
ax.plot(results[i][0], results[i][1], linewidth=2, label=f"{class_names[i]} AUC: {results[i][2]:0.5f}")
ax.plot((0, 1), (0, 1), "--", linewidth=1, label="predicted line")
ax.legend(loc="lower right")
ax.set_title("ROC Curve")
ax.set_xlabel("False Positive Rate")
ax.set_ylabel("True Positive Rate")
ax.set_xlim(0,1)
ax.set_ylim(0,1)
# 绘制热力图
def plot_heatmap(heat_conf, ax):
class_names = list(tag_map.keys())
im = ax.imshow(heat_conf)
ax.set_xticks(range(len(class_names)))
ax.set_xticklabels(labels=tag_map.keys(), rotation=45, ha="right", rotation_mode="anchor")
ax.set_yticks(range(len(class_names)))
ax.set_yticklabels(labels=tag_map.keys())
ax.set_title("Three Distribution")
for i in range(len(tag_map)):
for j in range(len(tag_map)):
value = heat_conf[i, j]
# 提高可视化观感
text_color = "black" if im.norm(value) > 0.5 else "white"
ax.text(j, i, value, ha="center", va="center", color=text_color, fontweight="bold")
cbar = plt.colorbar(im, ax=ax)
cbar.set_label("Sample Count")
if __name__ == "__main__":
# 导入数据
dataset = load_data("datingTestSet.txt")
# 检查数据是否导入
if not dataset:
print("没有有效数据")
exit()
# 创建numpy数组
feature_list = np.array([d["feature"] for d in dataset], dtype=np.float64)
tag_list = np.array([d["tag"] for d in dataset], dtype=np.int32)
# 归一化数组
normalized_feature = normalized(feature_list)
# 将特征和标签拼接
tag_list = tag_list.reshape(-1, 1) # 将numpy数组转置
feature_tag = np.hstack((normalized_feature, tag_list))
# 洗牌
np.random.seed(42)
np.random.shuffle(feature_tag)
# 选择最大准确率,选择最佳k值,并计算出最佳k值下的三分类特征混淆矩阵
best_k = 0
best_acc = 0
best_confusion = np.zeros([3, 3], dtype=np.int32)
for i in range(3, int(np.sqrt(len(feature_tag))), 2):
acc, confusion = k_folds_cross_valid_acc(feature_tag, i, 10)
if best_acc < acc:
best_k = i
best_acc = acc
best_confusion = confusion
print(f"十折交叉验证的最佳k值为:{best_k},对应的准确率为:{best_acc:0.5f}")
# 评估模型:获取ROC曲线和AUC值
results = list()
for i in range(3):
res = get_roc(feature_tag, 10, best_k, i)
auc = get_auc(res)
results.append([*res, auc])
# 评估数据可视化
fig, (ax1, ax2) = plt.subplots(1, 2, figsize=(12, 5))
plot_roc(results, ax1)
plot_heatmap(best_confusion, ax2)
plt.tight_layout()
plt.show()由于算法实现和C++版的类似,且小编给出的代码注释清晰,在一些函数边上也有注释使用原因,所以不再赘述。
6.3 运行效果展示
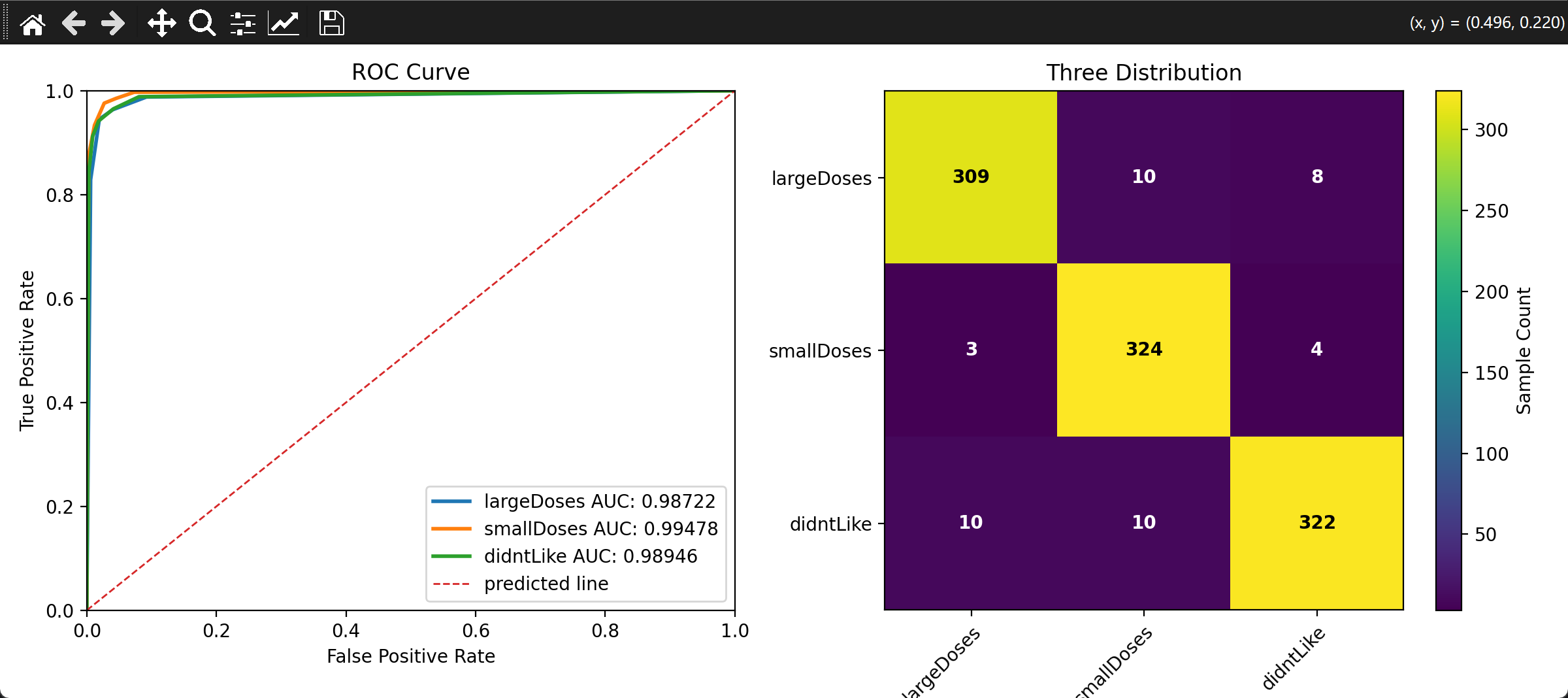
七、总结
通过实现C++,我们可以更加深刻的了解KNN算法的原理;
通过实现Python,我们可以更明白为什么Python更适合做与人工智能相关的工作;
通过实现本文的内容,我对C++配置文件的理解更加深刻了;
相信读者也能从这么一篇详细的博客学到点东西。