卷积神经网络(CNN)入门:看图识物不再难!
作者:南方的狮子先生
日期:2025-10
GitHub仓库地址:https://github.com/TZ-WYmail/SUSTech-CS312-DeepLearning(包含课件内容,发财小手点点star)
关键词:CNN、卷积、池化、参数共享、稀疏连接、图像识别、初学者
个人感觉课件内容不如动手深度学习的内容详细(课件实在是太抽象了)
1. 为什么图像不适合全连接网络?(参数数量太多,直接爆炸)
想象把一张 1920×1080 的 RGB 照片 直接拉平:
1920 \\times 1080 \\times 3 = 6,220,800 \\text{ 个像素}
再接一层 100 个神经元 的全连接:
6,220,800 \\times 100 = 622,080,000 \\text{ 个参数!}
→ 6 亿参数 ,内存爆炸,还容易过拟合。
更糟的是:把图像右移 1 像素 ,输入向量完全变了,网络又得重新学------毫无平移鲁棒性。
2. CNN 的核心思想(一句话记住)
"用滑动窗口扫描图片,同一组参数反复使用!"
这样就把 6 亿参数 压到 几万 ,而且天生不怕图像平移。
3. CNN 四大法宝
| 法宝 | 作用 | 生活比喻 |
|---|---|---|
| 卷积 | 提取局部特征(边缘、纹理) | 放大镜逐格看 |
| 参数共享 | 同一个"放大镜"全图用 | 全世界共用一把尺子 |
| 稀疏连接 | 每个输出只依赖一小片输入 | 只问邻居,不找全小区 |
| 池化 | 下采样、降维、抗小扰动 | 把 4 张照片压成 1 张最显眼 |
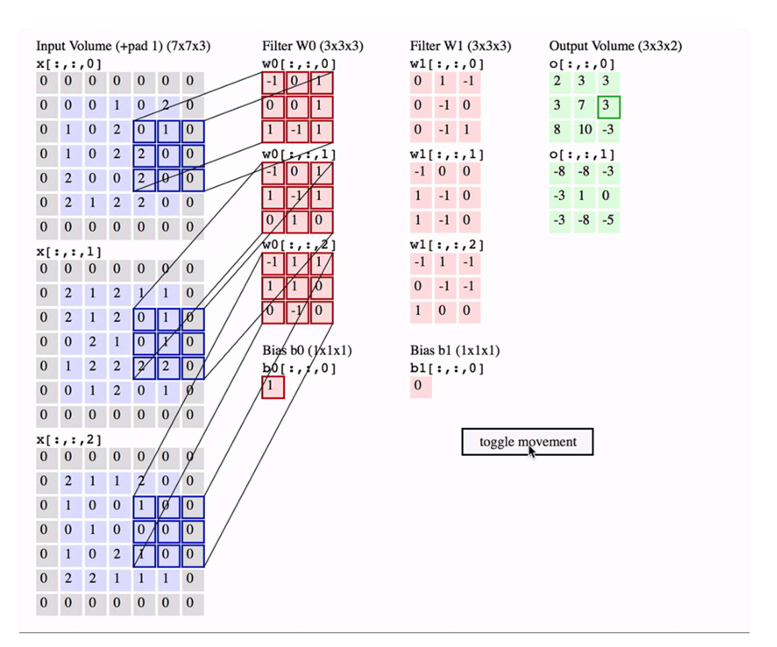
4. 卷积到底在算什么?
4.1 二维卷积动图(文字版)
输入 5×5 核 3×3 输出 3×3
┌──────┐ ┌──────┐ ┌──────┐
│1 2 3│ │a b c│ │ a·1+b·2+c·3 │
│4 5 6│ * │d e f│ = │ +d·4+e·5+f·6 │ ← 把 9 个乘加结果写进一个格子
│7 8 9│ │g h i│ │ = 单点输出 │
└──────┘ └──────┘ └─────────────┘→ 核(kernel)像"特征探测器 ",滑完整张图就得到一张特征图 (feature map)。
公式:
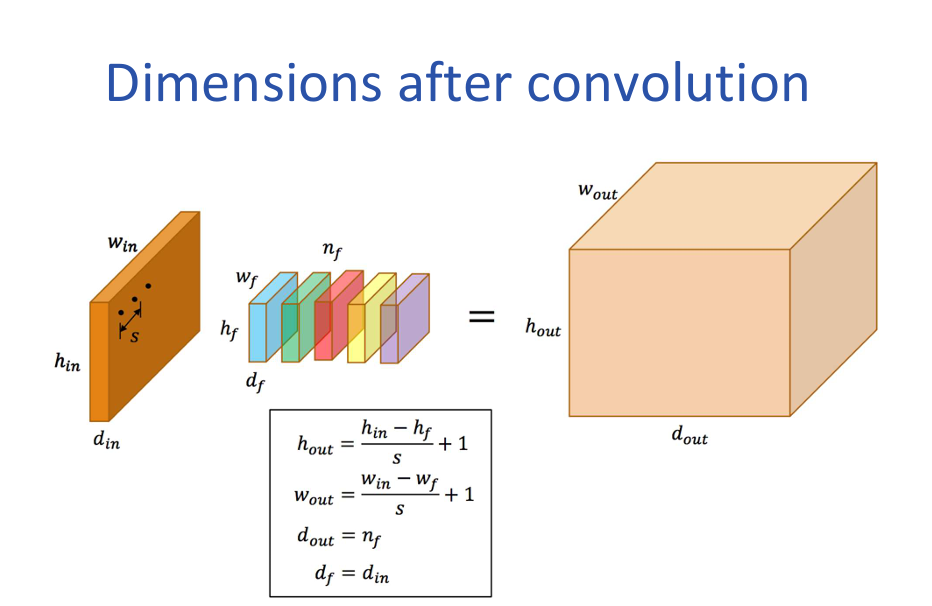
S:stride (步幅)
H_out(高度方向上面的(shape【0】))=(H_in-K+P)/S+1 或者 floor((H_in-K+P+S)/S)
4.2 代码一行的样子
python
import torch.nn as nn
conv = nn.Conv2d(in_channels=3, out_channels=16, kernel_size=3, stride=1, padding=1)5. 池化:把"不重要"的信息扔掉
| 类型 | 做法 | 效果 |
|---|---|---|
| Max Pooling | 取 2×2 窗口里最大值 | 保留最显著特征,抗微小位移 |
| Average Pooling | 取 2×2 窗口平均值 | 平滑降噪,但不如 Max 常用 |
python
pool = nn.MaxPool2d(kernel_size=2, stride=2) # 宽高各减半6. 零填充(Padding)------控制输出尺寸
- Valid padding:不补 0,输出越来越小。
- Same padding :补 0,输出与输入同尺寸(方便堆叠)。
公式(不含 padding):
H_{\\text{out}} = \\left\\lfloor \\frac{H_{\\text{in}} - H_{\\text{kernel}}}{\\text{stride}} \\right\\rfloor + 1
想保持尺寸?把 padding 设为:
\\text{padding} = \\left\\lfloor \\frac{\\text{kernel_size}}{2} \\right\\rfloor
7. 参数共享 vs 局部连接
| 模式 | 参数量 | 说明 |
|---|---|---|
| 全连接 | H×W×C×NH \times W \times C \times NH×W×C×N | 每个输出神经元连所有输入,参数爆炸 |
| 局部连接 | 降维但仍位置专用参数 | 核不一样,参数量仍大 |
| 卷积(参数共享) | 核大小×输入通道×输出通道 | 同一核全图滑,参数暴降 |
8. 真实滤镜长啥样?
这是 ImageNet 上学到的 96 个 11×11 彩色滤镜(Krizhevsky 等):
RGB 11×11 → 边缘、颜色 blob、纹理→ 网络自己学会边缘检测 (类似 Sobel)、颜色斑点,无需手工设计!
9. 完整 CNN 玩具例子(PyTorch)
python
import torch.nn as nn
class TinyCNN(nn.Module):
def __init__(self):
super().__init__()
self.features = nn.Sequential(
nn.Conv2d(3, 16, 3, padding=1), # 32×32×3 → 32×32×16
nn.ReLU(),
nn.MaxPool2d(2), # 32×32×16 → 16×16×16
nn.Conv2d(16, 32, 3, padding=1), # 16×16×16 → 16×16×32
nn.ReLU(),
nn.MaxPool2d(2) # 16×16×32 → 8×8×32
)
self.classifier = nn.Sequential(
nn.Flatten(), # 8×8×32 = 2048
nn.Linear(2048, 10) # 10 分类
)
def forward(self, x):
x = self.features(x)
return self.classifier(x)10. 常见坑 & 小贴士
| 现象 | 可能原因 | 快速修 |
|---|---|---|
| 输出尺寸太小 | 没 padding / 池化太多 | 加 padding 或减 stride |
| 参数还是多 | 卷积核太大 | 把 5×5 拆成两个 3×3(相同感受野,参数↓) |
| 过拟合 | 模型太大 | 加 Dropout、数据增强、减小通道数 |
11. 总结脑图(文字版)
图像输入
│
├─→ 卷积层:滑窗提取特征(参数共享)
├─→ 激活层:ReLU 等非线性
├─→ 池化层:下采样、抗平移
├─→ 重复 N 次(越往后通道越多、尺寸越小)
│
├─→ 展平 → 全连接 → Softmax
│
↓
类别概率12. 下一步学什么?
- 经典架构:LeNet → AlexNet → VGG → ResNet(下周详解)
- 进阶技巧:1×1 卷积、残差连接、分组卷积、空洞卷积
- 实战项目 :用 CNN 做 CIFAR-10 分类 或 Kaggle 猫狗大战