第八章:开放协议(Open Protocol)
在第七章:链路器中,我们了解到链路器是连接应用与DJI无人机的关键信使
但信使需要一种特定的"语言"来沟通------这就是开放协议(Open Protocol) ,它是链路器与无人机飞控通信的标准化语言。
什么是开放协议?(无人机的母语)
将DJI无人机视为使用独特语言的智能机器
开放协议就是这种飞控系统的原生语言,定义了信息打包与交换的精确规则:
为什么需要开放协议?
可靠的通信协议至关重要:
- 准确性:确保无人机正确解析每条指令
- 可靠性:提供错误检测与重传机制
- 安全性:支持加密防止未授权访问
- 模块化:标准化通信层使各模块无需了解彼此实现细节
协议数据包核心结构
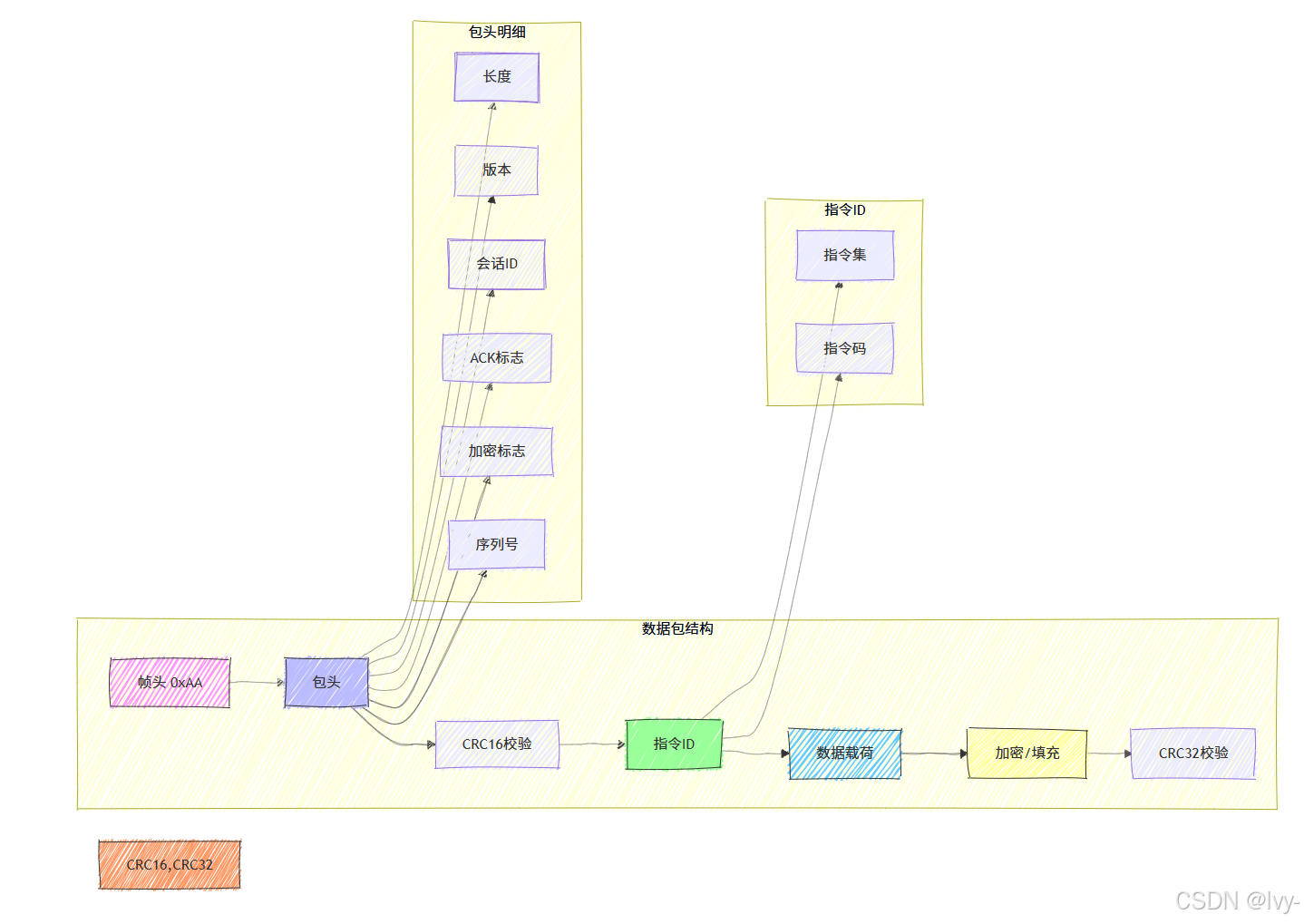
每个开放协议数据包都遵循严格格式:
| 组件 | 描述 |
|---|---|
| 帧头(SOF) | 固定字节0xAA标记数据包起始 |
| 包头(Header) | 包含数据包长度、协议版本、会话ID、ACK标志、加密标志和序列号等元数据 |
| CRC16校验 | 包头校验码,用于验证传输完整性 |
| 指令ID | 由指令集(如飞行控制)和具体指令(如起飞)组成的双字节编码 |
| 数据载荷 | 指令相关参数,如起飞高度或航点坐标 |
| 加密/填充 | 加密后的数据可能添加填充字节以满足加密块大小要求 |
| CRC32校验 | 完整数据载荷的校验码 |
相关设计-前文传送:Linux网络实验_lvy-的博客 这部分专栏下有讲到过许多协议的设计
& ProtoBuf | Json_lvy-的博客 这部分专栏 对于数据流协议的使用
如何使用开放协议(间接调用)
开发者通常无需直接操作协议层,SDK已封装所有底层细节。例如:
cpp
// 来自第二章:飞行控制
vehicle->flightController->startTakeoffSync(functionTimeout);
// 来自第六章:数据订阅
auto gpsData = subscribe->getValue<DJI::OSDK::Telemetry::TOPIC_GPS_FUSED>();高层API调用会被自动转换为开放协议数据包,经由链路器发送至无人机,响应数据也会被自动解析。
底层原理:协议工作流程
通信流程示例(起飞指令)
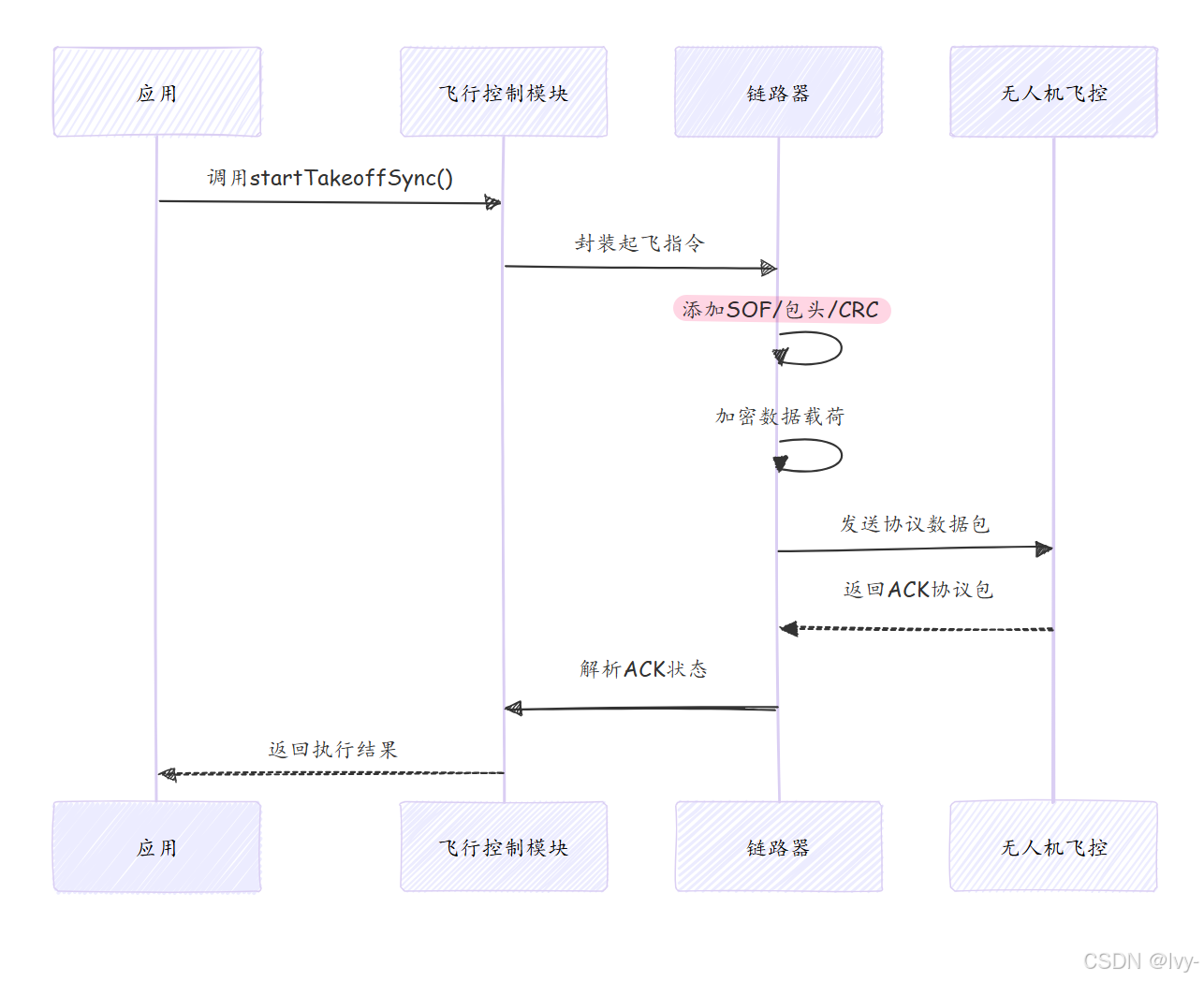
核心代码
协议包构造(简化自dji_open_protocol.cpp)
cpp
uint16_t OpenProtocol::encrypt(uint8_t* pdest, const uint8_t* psrc, uint16_t w_len) {
OpenHeader* p_head = (OpenHeader*)pdest;
p_head->sof = OpenProtocol::SOF; // 设置帧头
p_head->length = data_len; // 设置包长度
p_head->enc = is_enc ? 1 : 0; // 设置加密标志
memcpy(pdest + sizeof(OpenHeader), psrc, w_len); // 填充数据载荷
encodeData(p_head, aes256_encrypt_ecb); // 加密数据
calculateCRC(pdest); // 计算校验码
return data_len;
}数据包验证(简化自dji_open_protocol.cpp)
cpp
bool OpenProtocol::verifyData() {
OpenHeader* p_head = (OpenHeader*)(p_filter->recvBuf);
if (crcTailCheck((uint8_t*)p_head, p_head->length) == 0) {
encodeData(p_head, aes256_decrypt_ecb); // 解密数据
return callApp(); // 调用应用层处理
} else {
reuseDataStream(); // 数据损坏时尝试恢复
}
return false;
}结论
开放协议是Onboard-SDK与无人机通信的基石,虽然开发者无需直接操作协议层,但理解其帧结构、加密机制和校验流程有助于深入掌握SDK工作原理。
这种标准化协议确保了指令传输的可靠性与安全性。
接下来我们将探索SDK如何高效管理协议数据包的内存使用