简介
本文从特征与角点的基础概念入手,系统解析Harris角点检测的算法逻辑------通过窗口移动分析灰度变化、构建矩阵模型、计算响应值筛选角点,并结合Python-OpenCV完成实战实现。帮助读者理解如何将"人类视觉中的角点"转化为"计算机可识别的定量特征",为图像拼接、目标跟踪等任务奠定基础。
一、背景:从"特征"到"角点"
1.1 什么是"特征"?
在数据挖掘中,特征是数据集的"本质标识" (比如用户的年龄、消费习惯);在计算机视觉中,图像特征是能描述图像局部/整体内容的"关键信息",主要分为两类:
- 区域特征:角点、边缘、斑点(与周围灰度/颜色差异明显的区域,比如地图中的一棵树、一栋房子);
- 数据特征:对图像信息的抽象表示(比如将图像像素转化为向量)。
其中,角点是最常用的区域特征之一------它是图像轮廓的交点,即使视角变化也能保持稳定。
1.2 为什么需要"特征检测"?
人类能轻松识别图像中的"角点"(比如桌子的拐角、窗户的边角),但计算机只能处理"数值"。特征检测的核心是将视觉信息转化为定量数据,让计算机"读懂"图像。
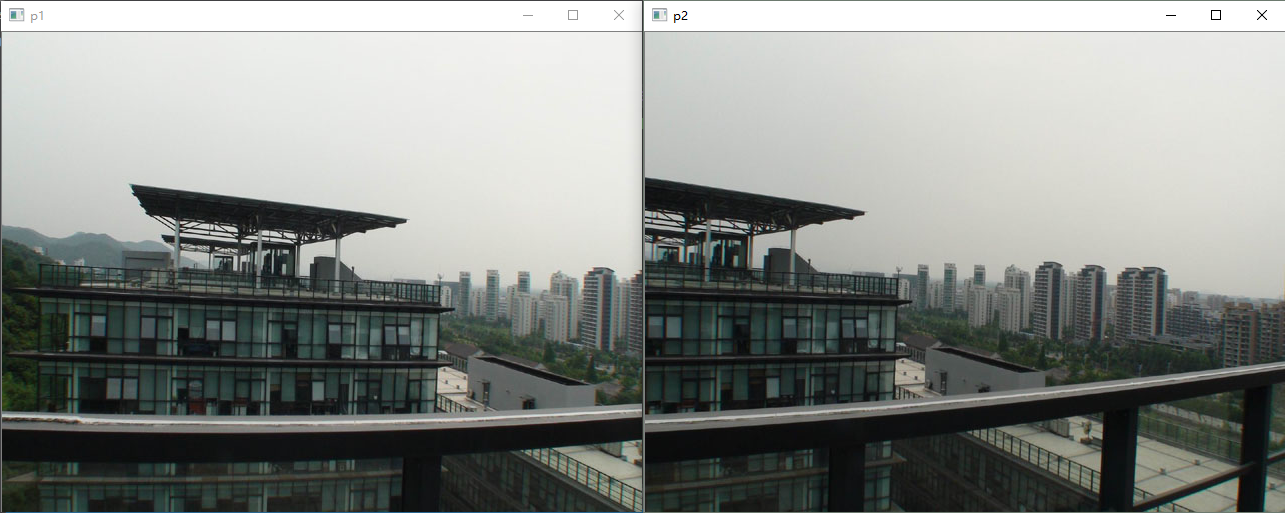
比如全景拼接 :两张拍摄同一建筑的图像,人类能通过"相同的岩石拐角"对齐,但计算机需要找到这两个"角点"的坐标,才能将图像拼接成全景图。
1.3 角点的"特殊之处"
角点相比边缘、斑点等特征,有4个显著优势:
- 局部性:属于"点特征",对遮挡(比如物体被部分挡住)有鲁棒性;
- 数量多:一张图像能检测出成百上千个角点,足够用于匹配;
- 辨识度高:不同物体的角点差异明显,容易区分;
- 速度快:提取过程计算量小,适合实时任务。
二、Harris角点检测:算法原理
Harris角点检测的核心思想是:通过窗口移动分析灰度变化------如果窗口向任意方向移动,灰度都发生显著变化,则窗口中心是角点。
2.1 灰度变化的数学描述
假设我们有一个大小为WWW的窗口,将其向(u,v)(u,v)(u,v)方向移动,窗口内的灰度变化可以用以下公式量化:
E(u,v)=∑(x,y)∈Ww(x,y)I(x+u,y+v)−I(x,y)2 E(u,v) = \sum_{(x,y) \in W} w(x,y) \left I(x+u, y+v) - I(x,y) \\right^2 E(u,v)=(x,y)∈W∑w(x,y)I(x+u,y+v)−I(x,y)2
参数解释:
- (u,v)(u,v)(u,v):窗口的偏移量(比如向右移动2像素、向下移动3像素);
- (x,y)(x,y)(x,y):窗口内的像素坐标;
- I(x,y)I(x,y)I(x,y):(x,y)(x,y)(x,y)处的灰度值;
- w(x,y)w(x,y)w(x,y):窗口加权函数(通常用高斯函数,离窗口中心越近的像素权重越大)。
2.2 公式化简:泰勒展开的妙用
直接计算E(u,v)E(u,v)E(u,v)的计算量很大,我们可以用泰勒展开简化:
对于二维函数I(x+u,y+v)I(x+u, y+v)I(x+u,y+v),泰勒展开近似为:I(x+u,y+v)≈I(x,y)+uIx+vIy I(x+u, y+v) \approx I(x,y) + u I_x + v I_y I(x+u,y+v)≈I(x,y)+uIx+vIy
其中,Ix=∂I∂xI_x = \frac{\partial I}{\partial x}Ix=∂x∂I(xxx方向梯度,反映水平方向的灰度变化),Iy=∂I∂yI_y = \frac{\partial I}{\partial y}Iy=∂y∂I(yyy方向梯度,反映垂直方向的灰度变化)。
将泰勒展开代入E(u,v)E(u,v)E(u,v),化简后得到:E(u,v)≈uvMuv E(u,v) \approx \begin{bmatrix} u & v \end{bmatrix} M \begin{bmatrix} u \\ v \end{bmatrix} E(u,v)≈uvMuv
其中,矩阵MMM是灰度变化的协方差矩阵 ,由梯度的加权和构成:M=ABBC,A=∑w(x,y)Ix2,B=∑w(x,y)IxIy,C=∑w(x,y)Iy2 M = \begin{bmatrix} A & B \\ B & C \end{bmatrix}, \quad \begin{aligned} A &= \sum w(x,y) I_x^2, \\ B &= \sum w(x,y) I_x I_y, \\ C &= \sum w(x,y) I_y^2 \end{aligned} M=ABBC,ABC=∑w(x,y)Ix2,=∑w(x,y)IxIy,=∑w(x,y)Iy2
2.3 角点的"判断标准":响应函数RRR
矩阵MMM的特征值 (λ1,λ2\lambda_1, \lambda_2λ1,λ2)能反映窗口内的灰度变化特性:
- 平坦区域:λ1≈0,λ2≈0\lambda_1 \approx 0, \lambda_2 \approx 0λ1≈0,λ2≈0(灰度几乎不变);
- 边缘区域:一个特征值很大,另一个很小(仅垂直边缘方向有变化);
- 角点区域:两个特征值都很大(任意方向都有变化)。
为了量化这一特性,Harris提出了响应函数 RRR:R=det(M)−k⋅trace(M)2 R = \det(M) - k \cdot \text{trace}(M)^2 R=det(M)−k⋅trace(M)2
其中:
- det(M)=A⋅C−B2\det(M) = A \cdot C - B^2det(M)=A⋅C−B2(矩阵的行列式);
- trace(M)=A+C\text{trace}(M) = A + Ctrace(M)=A+C(矩阵的迹);
- kkk:经验常数(通常取0.04~0.06)。
2.4 算法流程总结
Harris角点检测的完整步骤:
- 计算梯度 :用Sobel算子计算图像的IxI_xIx和IyI_yIy;
- 构建矩阵MMM :计算Ix2,Iy2,IxIyI_x^2, I_y^2, I_x I_yIx2,Iy2,IxIy的高斯加权和,得到A,B,CA, B, CA,B,C;
- 计算响应值RRR :对每个像素计算RRR;
- 阈值处理 :保留R>thresholdR > \text{threshold}R>threshold的像素;
- 非极大值抑制 :在局部区域(比如3×3窗口)中保留RRR最大的像素,得到最终角点。
三、Python-OpenCV实现Harris角点检测
OpenCV提供了cv2.cornerHarris函数,可以快速实现Harris角点检测。以下是完整步骤:
3.1 准备工作:安装依赖
首先安装OpenCV和NumPy:
bash
pip install opencv-python numpy matplotlib3.2 OpenCV API实现
以下代码演示如何用cv2.cornerHarris检测角点:
python
import cv2
import numpy as np
import matplotlib.pyplot as plt
# 1. 读取图像(转为灰度图)
img = cv2.imread('test_image.jpg')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
gray = np.float32(gray) # cornerHarris要求输入为float32
# 2. 计算Harris响应值
# 参数说明:
# - src:灰度图(float32)
# - blockSize:窗口大小(比如2表示2×2窗口)
# - ksize:Sobel算子的大小(比如3表示3×3 Sobel)
# - k:响应函数的系数(0.04~0.06)
harris_response = cv2.cornerHarris(gray, blockSize=2, ksize=3, k=0.04)
# 3. 阈值处理:保留响应值大的像素
# 将响应值放大(便于可视化),并标记角点为红色
harris_response = cv2.dilate(harris_response, None)
img[harris_response > 0.01 * harris_response.max()] = [0, 0, 255] # 红色标记角点
# 4. 显示结果
plt.figure(figsize=(10, 8))
plt.imshow(cv2.cvtColor(img, cv2.COLOR_BGR2RGB))
plt.title('Harris Corner Detection')
plt.axis('off')
plt.show()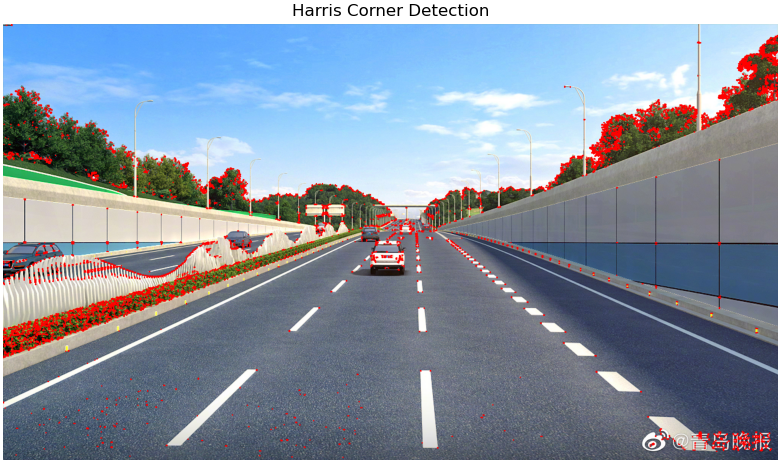
3.3 手动实现:理解底层逻辑
为了更深入理解,我们可以手动实现Harris角点检测的核心步骤:
python
import cv2
import numpy as np
from scipy.ndimage import gaussian_filter
import matplotlib.pyplot as plt
def manual_harris(gray_img, block_size=2, k=0.04, sigma=1.0):
# 1. 计算梯度(Sobel算子)
grad_x = cv2.Sobel(gray_img, cv2.CV_64F, 1, 0, ksize=3)
grad_y = cv2.Sobel(gray_img, cv2.CV_64F, 0, 1, ksize=3)
# 2. 计算梯度的平方和乘积
grad_x2 = gaussian_filter(grad_x**2, sigma=sigma)
grad_y2 = gaussian_filter(grad_y**2, sigma=sigma)
grad_xy = gaussian_filter(grad_x * grad_y, sigma=sigma)
# 3. 计算响应值R
det_M = grad_x2 * grad_y2 - grad_xy**2
trace_M = grad_x2 + grad_y2
R = det_M - k * (trace_M)**2
# 4. 非极大值抑制(保留局部最大值)
kernel = np.ones((block_size, block_size), np.uint8)
local_max = cv2.dilate(R, kernel) == R
R[~local_max] = 0
return R
# 测试手动实现
gray = cv2.cvtColor(cv2.imread('test_image.jpg'), cv2.COLOR_BGR2GRAY)
R = manual_harris(gray)
# 阈值处理并显示
img = cv2.imread('test_image.jpg')
img[R > 0.01 * R.max()] = [0, 0, 255]
plt.imshow(cv2.cvtColor(img, cv2.COLOR_BGR2RGB))
plt.show()
四、总结与扩展
Harris角点检测是计算机视觉中最经典的点特征提取算法,它的优势是计算速度快、对旋转和光照变化鲁棒,但也有局限性(比如对尺度变化不敏感)。
如果需要处理尺度变化的场景,可以学习SIFT (尺度不变特征变换)或ORB(更快的替代方案)。而Harris算法作为基础,是理解这些高级算法的关键。