目录
一、前言
(1)前言
本次项目使用YOLO11对目标进行检测,具体实现了模型加载、图像加载、ONNX Runtime环境初始化、图像预处理和后处理、检测框的绘制、图像显示等功能。代码注释详细。
模型使用python中训练成pt,然后转为onnx模型,标注工具使用ISAT进行标注。本次项目还提供了测试模型和测试图像,请仅作学习使用。
模型只有一个功能,检测电容负极标识和非负极标识,如果使用自己的模型,替换即可。
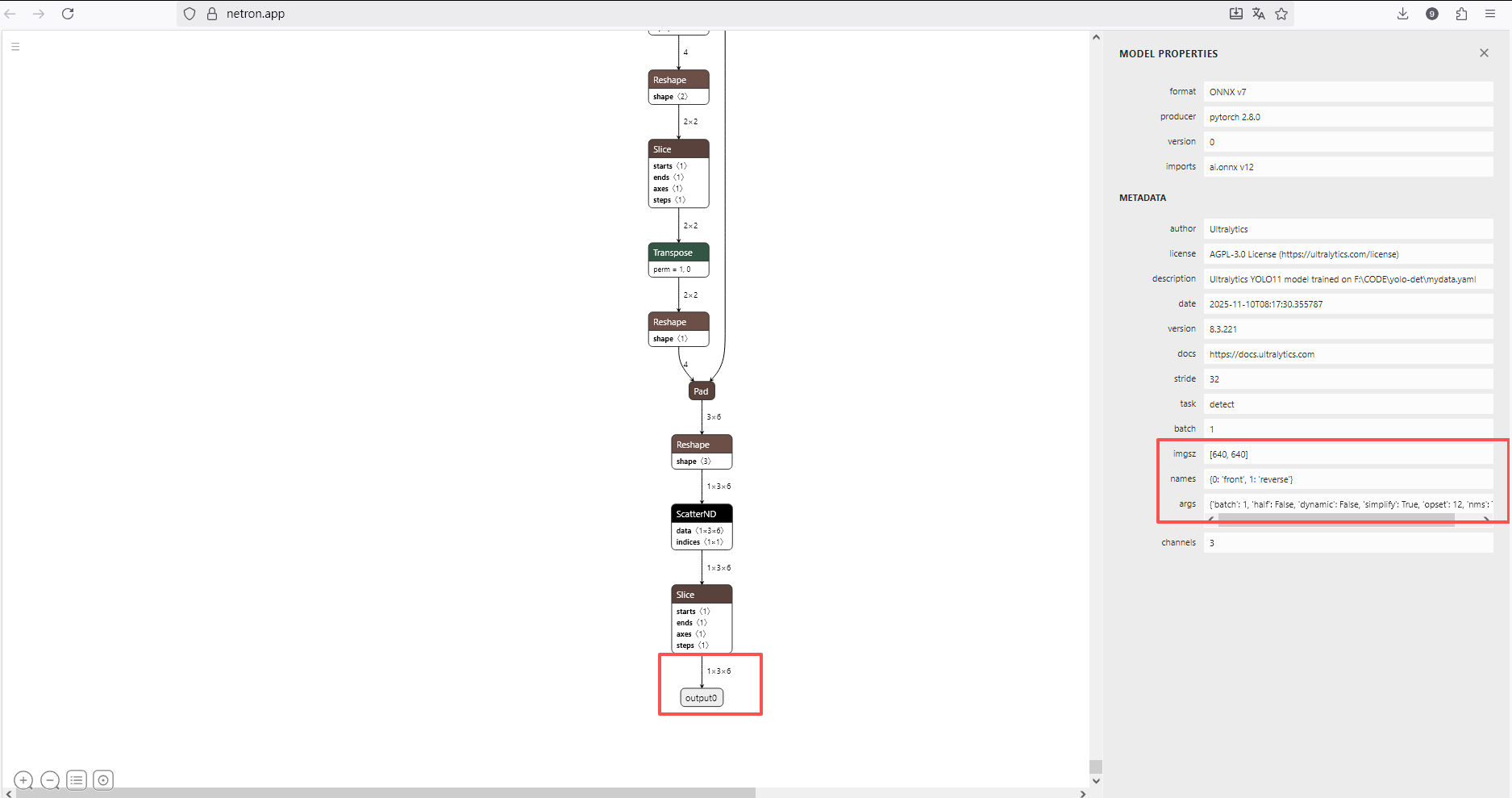
模型的具体参数可以使用:netron.app 进行查看
本次使用的 1106_YOLO11_ONNX_FP32.onnx 模型具体信息如下:
输入大小:640x640
类别:{0: 'front', 1: 'reverse'}
参数:batch': 1, 'half': False, 'dynamic': False, 'simplify': True, 'opset': 12, 'nms': True
输出张量:1 ,3,6
如果使用自己的模型:比如你的输出向量为1 ,300,6,请在代码中修改以适配。
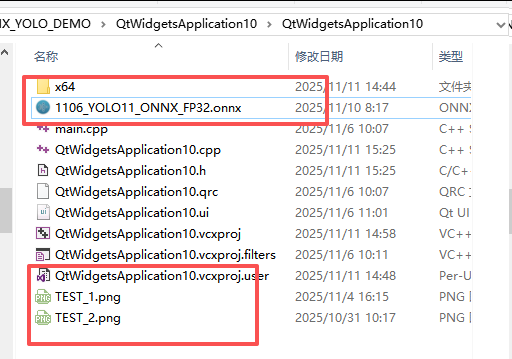
模型和测试图像在打包的根目录中查看
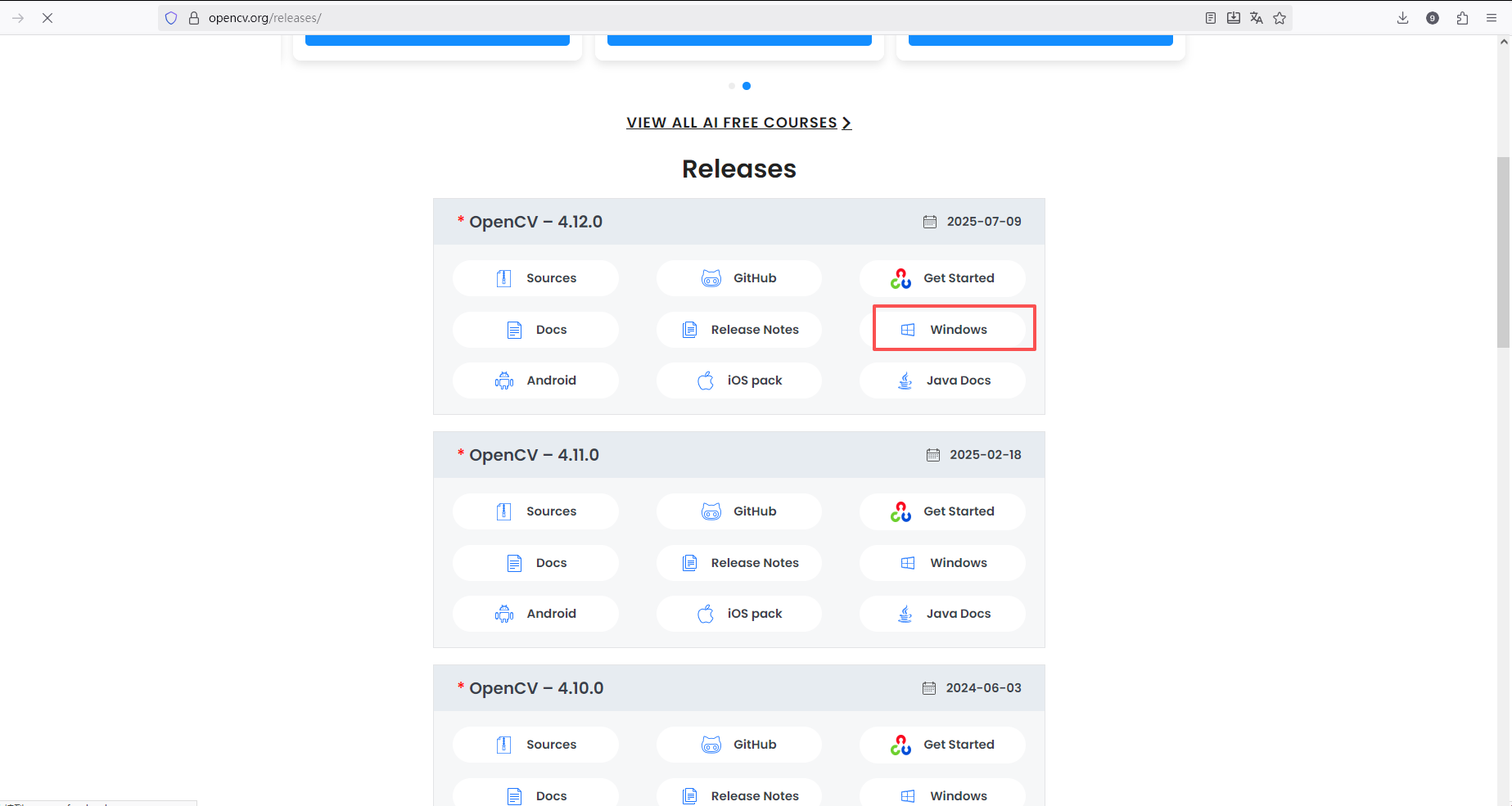
(2)项目准备工作
下载并安装opencv 4.12.0:opencv官网
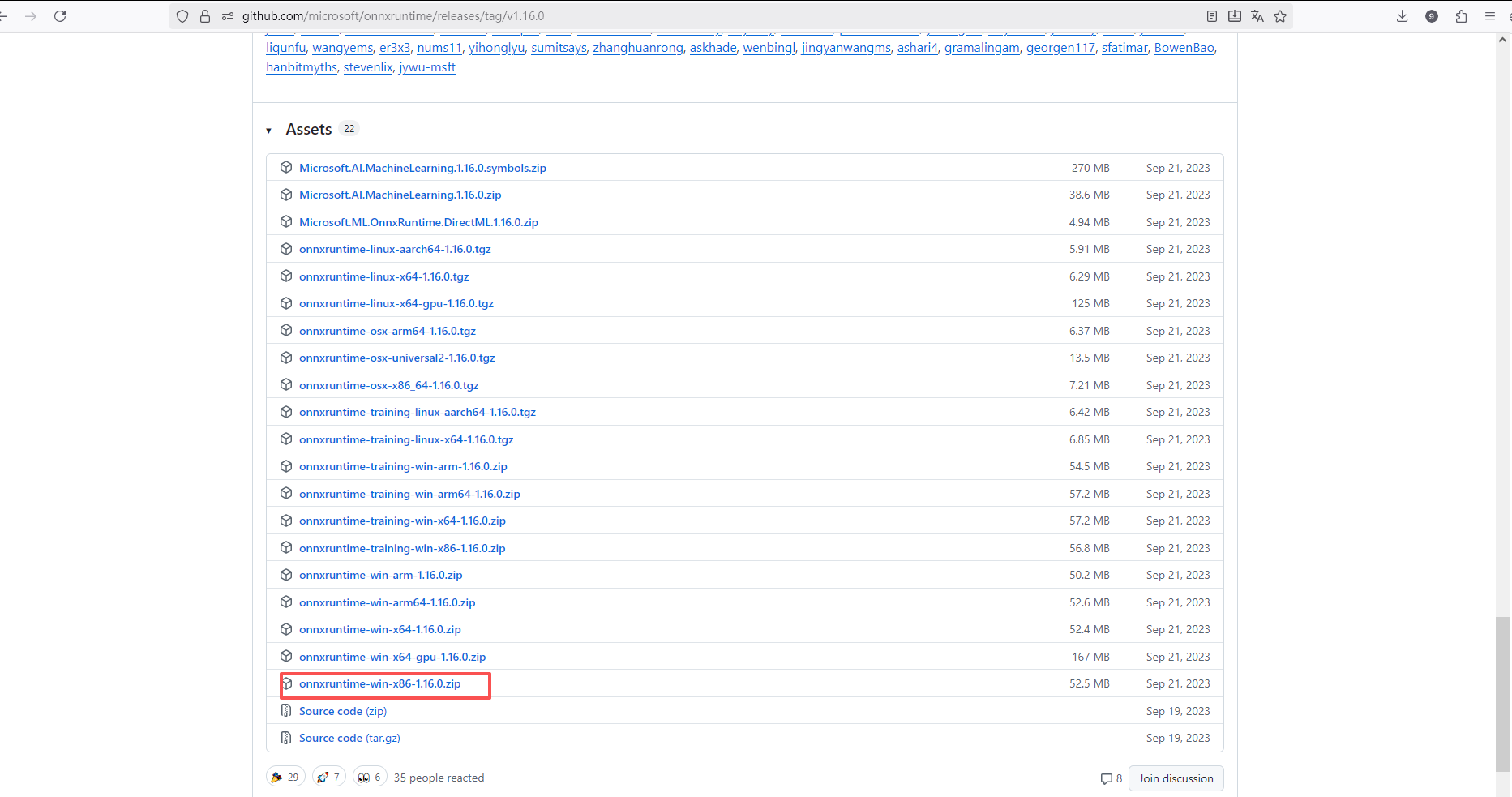
下载onnxruntime-win-x64-1.16.0库:onnxruntime-win-x64-1.16.0 (CPU版本兼容性挺好,最新的1.23.1应该也是可以用的,如果有库了可以先试试不同版本的)
(2)项目中添加头文件和静态库lib和动态库dll
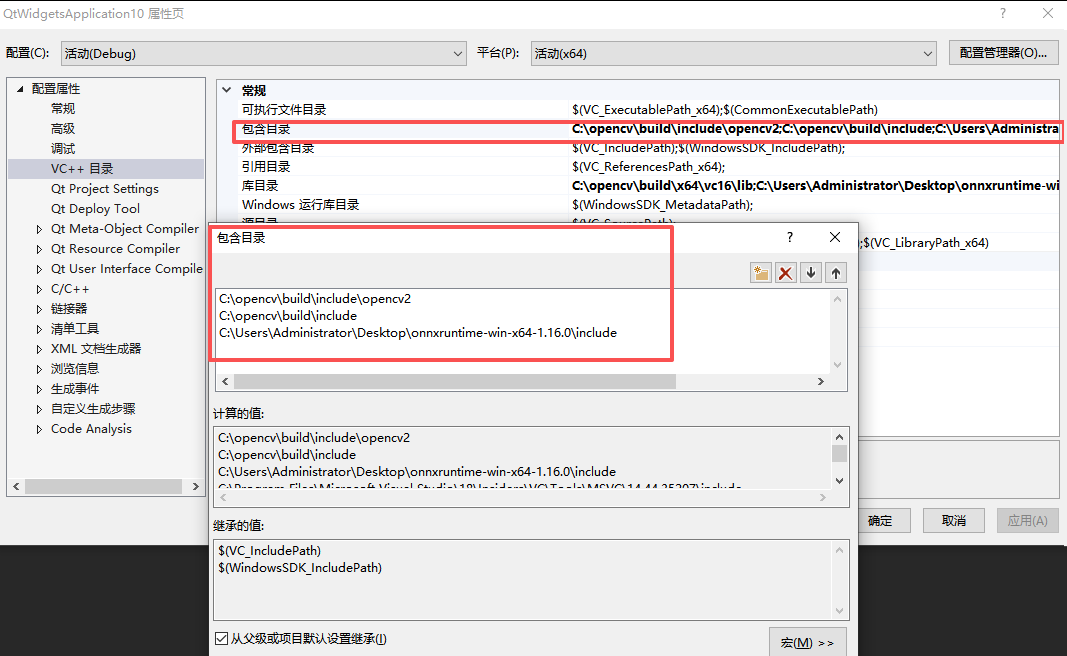
包含目录中添加:
C:\opencv\build\include\opencv2
C:\opencv\build\include
C:\Users\Administrator\Desktop\onnxruntime-win-x64-1.16.0\include
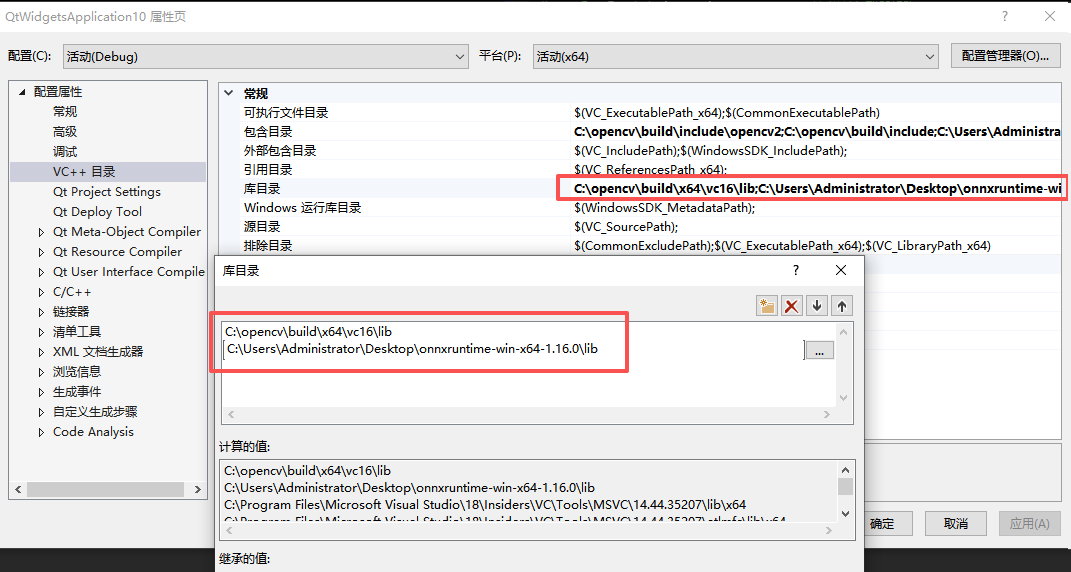
库目录中添加:
C:\opencv\build\x64\vc16\lib
C:\Users\Administrator\Desktop\onnxruntime-win-x64-1.16.0\lib
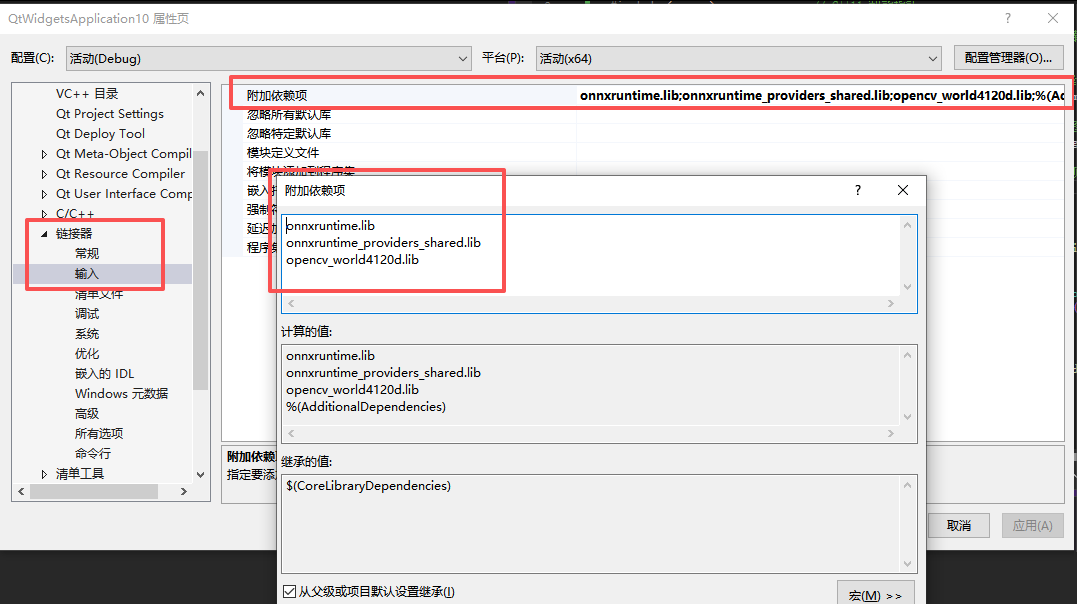
链接器中输入:
onnxruntime.lib
onnxruntime_providers_shared.lib
opencv_world4120d.lib
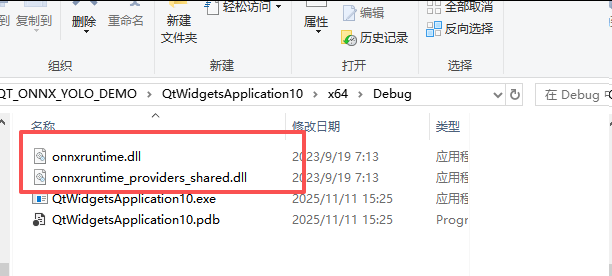
项目的x64->Debug中要添加这两个dll动态库,不然会报0xc000007b应用程序无法启动的错误
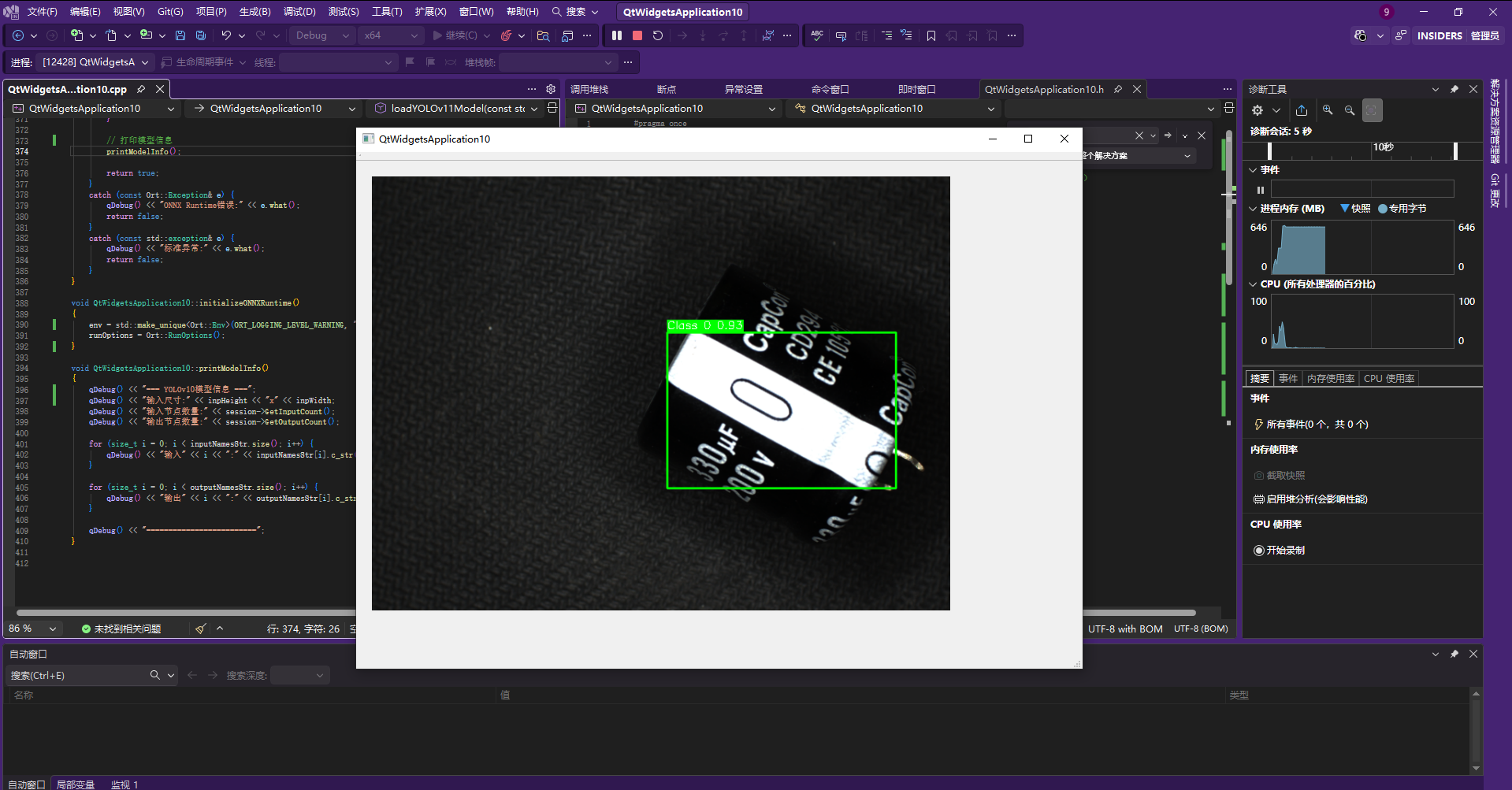
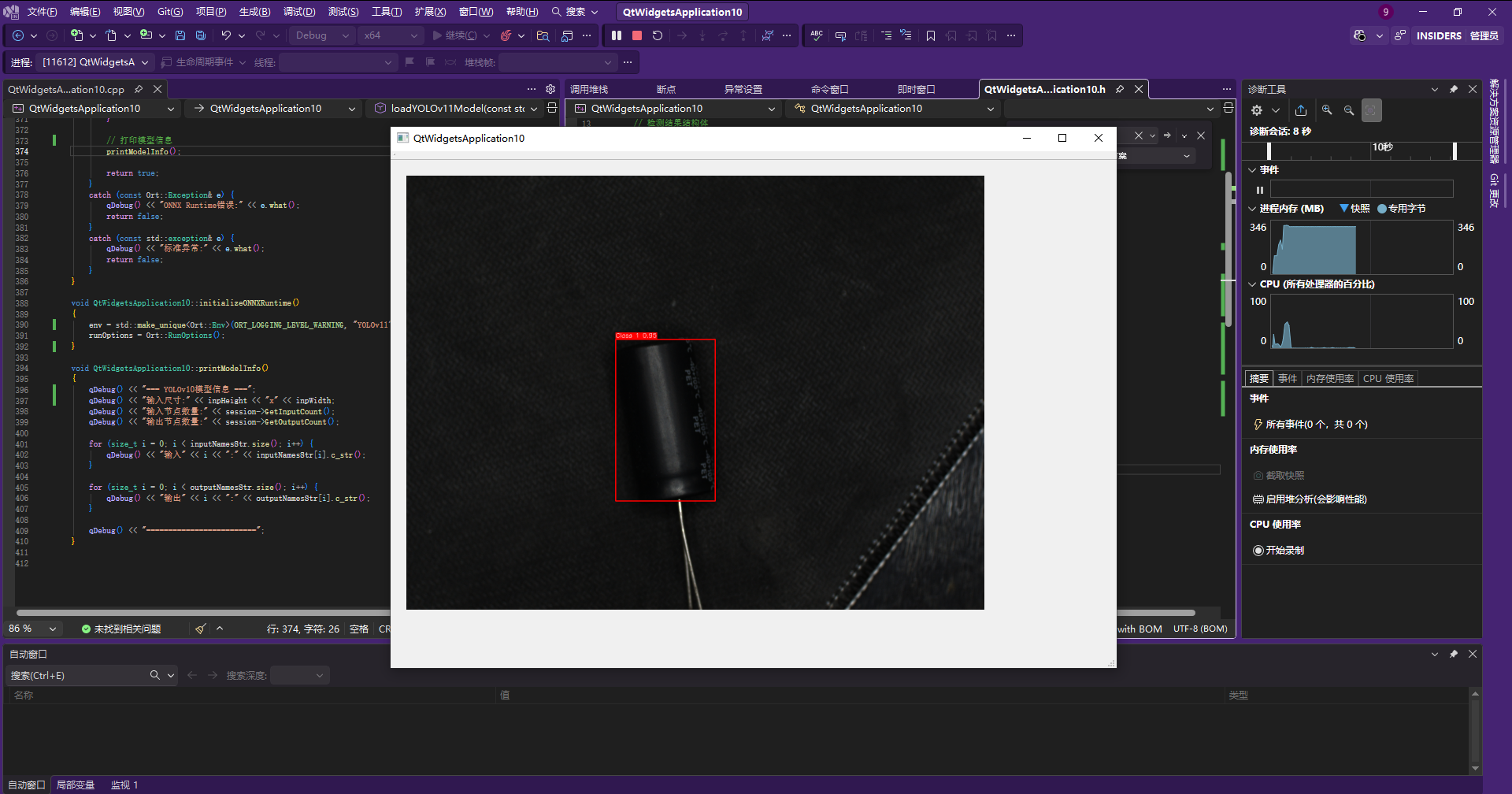
(3)YOLO11目标检测运行效果
二、代码详解
QtWidgetsApplication10.h
cpp
#pragma once
#include <QtWidgets/QMainWindow>
#include "ui_QtWidgetsApplication10.h"
#include <opencv2/opencv.hpp> // OPENCV 头文件(版本号:4.12.0)
#include <onnxruntime_cxx_api.h> // ONNX Runtime 头文件(CPU版本)(版本号:onnxruntime-win-x64-1.16.0)
#include <vector> // C++11 容器库
#include <string> // C++11 字符串库
#include <memory> // C++11 智能指针
#include <chrono> // C++11 高精度的时间库
#include <algorithm> // C++11 操作容器中的元素
// 检测结果结构体
struct Detection {
cv::Rect box;
float conf;
int classId;
};
class QtWidgetsApplication10 : public QMainWindow
{
Q_OBJECT
public:
QtWidgetsApplication10(QWidget* parent = nullptr);
~QtWidgetsApplication10();
private:
// ONNX Runtime 相关成员变量
std::unique_ptr<Ort::Env> env;
std::unique_ptr<Ort::Session> session;
Ort::SessionOptions sessionOptions;
Ort::RunOptions runOptions;
// 模型输入输出信息
std::vector<std::string> inputNamesStr;
std::vector<std::string> outputNamesStr;
std::vector<const char*> inputNames;
std::vector<const char*> outputNames;
std::vector<std::vector<int64_t>> inputNodeDims;
std::vector<std::vector<int64_t>> outputNodeDims;
// 模型配置
std::string modelPath = "1106_YOLO11_ONNX_FP32.onnx";
std::string imagePath = "TEST_2.png";
int inpHeight = 640;
int inpWidth = 640;
// 预定义类别颜色或从配置文件中获取
std::vector<cv::Scalar> colors = {
cv::Scalar(0, 255, 0), // 绿色
cv::Scalar(0, 0, 255), // 红色
};
// 图像和检测结果
cv::Mat currentImage;
cv::Mat displayImage;
std::vector<Detection> currentDetections;
// 模型加载
bool loadYOLOv11Model(const std::string& model_path);
void initializeONNXRuntime(); // 初始化ONNX Runtime环境
void printModelInfo(); // 打印模型信息
// 图像加载
bool loadImage(const std::string& imagePath);
// 图像预处理
cv::Mat preprocessImage(const cv::Mat& image);
// 图像后处理
std::vector<Detection> postprocessResults(const std::vector<Ort::Value>& outputTensors,
const cv::Size& originalSize,
float confThreshold = 0.25f,
float iouThreshold = 0.45f);
// 目标检测
std::vector<Detection> detectObjects(const cv::Mat& image);
// 绘制检测结果
void drawDetections(cv::Mat& image, const std::vector<Detection>& detections);
void updateDisplay(); // 更新显示在label中
void autoDetect(); // 检测函数
private:
Ui::QtWidgetsApplication10Class ui;
};QtWidgetsApplication10.cpp
cpp
#include "QtWidgetsApplication10.h"
#include <QMessageBox>
#include <QDebug>
#include <QFile>
QtWidgetsApplication10::QtWidgetsApplication10(QWidget* parent)
: QMainWindow(parent)
{
ui.setupUi(this);
// 初始化ONNX Runtime并加载模型
try {
// 修改为你的YOLO模型绝对路径
if (loadYOLOv11Model(modelPath)) {
// 修改为你的测试图像绝对路径
if (loadImage(imagePath)) {
// 执行目标检测
autoDetect();
}
}
else {
QMessageBox::critical(this, "错误", "YOLOv11模型加载失败!");
}
}
catch (const std::exception& e) {
QMessageBox::critical(this, "异常", QString("模型加载异常: %1").arg(e.what()));
}
}
QtWidgetsApplication10::~QtWidgetsApplication10()
{
session.reset();
env.reset();
}
// 自动检测函数
void QtWidgetsApplication10::autoDetect()
{
if (currentImage.empty() || !session) {
return;
}
// 执行目标检测
auto start = std::chrono::high_resolution_clock::now(); // 开始计时
currentDetections = detectObjects(currentImage); // 执行目标检测
auto end = std::chrono::high_resolution_clock::now(); // 结束计时
auto duration = std::chrono::duration_cast<std::chrono::milliseconds>(end - start); // 计算耗时
// 绘制检测结果
displayImage = currentImage.clone();
drawDetections(displayImage, currentDetections);
updateDisplay();
// 更新状态
qDebug() << "检测完成,发现" << currentDetections.size() << "个目标,耗时:" << duration.count() << "ms";
}
// 加载图像
bool QtWidgetsApplication10::loadImage(const std::string& imagePath)
{
currentImage = cv::imread(imagePath);
if (currentImage.empty()) {
qDebug() << "无法加载图像文件:" << imagePath.c_str();
return false;
}
currentDetections.clear();
// 创建显示副本
displayImage = currentImage.clone();
updateDisplay();
qDebug() << "图像加载成功,尺寸:" << currentImage.cols << "x" << currentImage.rows;
return true;
}
// 目标检测
std::vector<Detection> QtWidgetsApplication10::detectObjects(const cv::Mat& image)
{
if (!session) {
qDebug() << "模型未加载!";
return {};
}
try {
// 保存原始图像尺寸
cv::Size originalSize = image.size();
// 预处理图像
cv::Mat processedImage = preprocessImage(image);
// 创建输入Tensor
size_t inputTensorSize = processedImage.total() * processedImage.channels();
std::vector<float> inputTensorValues(inputTensorSize);
// 将图像数据复制到inputTensorValues中(HWC -> CHW)
std::vector<cv::Mat> channels(3);
cv::split(processedImage, channels);
size_t channelSize = processedImage.rows * processedImage.cols;
for (int i = 0; i < 3; ++i) {
std::memcpy(inputTensorValues.data() + i * channelSize,
channels[i].data, channelSize * sizeof(float));
}
Ort::MemoryInfo memoryInfo = Ort::MemoryInfo::CreateCpu(
OrtAllocatorType::OrtArenaAllocator, OrtMemType::OrtMemTypeDefault);
std::vector<Ort::Value> inputTensors;
inputTensors.push_back(Ort::Value::CreateTensor<float>(
memoryInfo,
inputTensorValues.data(),
inputTensorValues.size(),
inputNodeDims[0].data(),
inputNodeDims[0].size()
));
// 执行推理
auto start = std::chrono::high_resolution_clock::now();
std::vector<Ort::Value> outputTensors = session->Run(
runOptions,
inputNames.data(),
inputTensors.data(),
inputTensors.size(),
outputNames.data(),
outputNames.size()
);
auto end = std::chrono::high_resolution_clock::now();
auto duration = std::chrono::duration_cast<std::chrono::milliseconds>(end - start);
qDebug() << "推理时间:" << duration.count() << "ms";
// 后处理结果
return postprocessResults(outputTensors, originalSize);
}
catch (const std::exception& e) {
qDebug() << "推理错误:" << e.what();
return {};
}
}
// 图像预处理
cv::Mat QtWidgetsApplication10::preprocessImage(const cv::Mat& image)
{
cv::Mat resized, floatImage;
// 调整图像尺寸
cv::resize(image, resized, cv::Size(inpWidth, inpHeight));
// 转换颜色空间 BGR -> RGB
cv::cvtColor(resized, resized, cv::COLOR_BGR2RGB);
// 归一化到 [0,1] 并转换为float
resized.convertTo(floatImage, CV_32FC3, 1.0 / 255.0);
return floatImage;
}
// 图像后处理
std::vector<Detection> QtWidgetsApplication10::postprocessResults(
const std::vector<Ort::Value>& outputTensors, const cv::Size& originalSize,
float confThreshold, float iouThreshold)
{
std::vector<Detection> detections;
if (outputTensors.empty()) {
qDebug() << "输出张量为空";
return detections;
}
// 获取输出数据
const float* outputData = outputTensors[0].GetTensorData<float>();
auto outputShape = outputTensors[0].GetTensorTypeAndShapeInfo().GetShape();
// 输出形状: [1, 3, 6] - [batch, num_detections, (x, y, w, h, conf, class)]
int numDetections = static_cast<int>(outputShape[1]);
int detectionSize = static_cast<int>(outputShape[2]);
qDebug() << "=== 后处理信息 ===";
qDebug() << "输出形状: [" << outputShape[0] << ", " << outputShape[1] << ", " << outputShape[2] << "]";
qDebug() << "检测数量:" << numDetections; //3
qDebug() << "检测维度:" << detectionSize; //6
qDebug() << "原始图像尺寸:" << originalSize.width << "x" << originalSize.height;
qDebug() << "模型输入尺寸:" << inpWidth << "x" << inpHeight;
// 计算缩放比例
float scaleX = static_cast<float>(originalSize.width) / inpWidth;
float scaleY = static_cast<float>(originalSize.height) / inpHeight;
qDebug() << "缩放比例 - X:" << scaleX << " Y:" << scaleY;
int validDetections = 0;
for (int i = 0; i < numDetections; ++i) {
const float* detection = outputData + i * detectionSize;
float conf = detection[4];
// 跳过低置信度的检测
if (conf < confThreshold) continue;
validDetections++;
// 直接使用原始坐标点
float x1 = detection[0];
float y1 = detection[1];
float x2 = detection[2];
float y2 = detection[3];
int classId = static_cast<int>(detection[5]);
// 输出原始坐标信息
qDebug() << "检测" << validDetections << " - 原始坐标: ("
<< x1 << ", " << y1 << ", " << x2 << ", " << y2
<< ") 置信度: " << conf << " 类别: " << classId;
// 如果需要将坐标映射回原始图像尺寸
float orig_x1 = x1 * scaleX;
float orig_y1 = y1 * scaleY;
float orig_x2 = x2 * scaleX;
float orig_y2 = y2 * scaleY;
qDebug() << "检测" << validDetections << " - 映射后坐标: ("
<< orig_x1 << ", " << orig_y1 << ", " << orig_x2 << ", " << orig_y2 << ")";
// 确保坐标在图像范围内
orig_x1 = std::max(0.0f, std::min(orig_x1, static_cast<float>(originalSize.width)));
orig_y1 = std::max(0.0f, std::min(orig_y1, static_cast<float>(originalSize.height)));
orig_x2 = std::max(0.0f, std::min(orig_x2, static_cast<float>(originalSize.width)));
orig_y2 = std::max(0.0f, std::min(orig_y2, static_cast<float>(originalSize.height)));
Detection det;
det.box = cv::Rect(static_cast<int>(orig_x1), static_cast<int>(orig_y1),
static_cast<int>(orig_x2 - orig_x1), static_cast<int>(orig_y2 - orig_y1));
det.conf = conf;
det.classId = classId;
detections.push_back(det);
qDebug() << "检测" << validDetections << " - 最终边界框: ("
<< det.box.x << ", " << det.box.y << ", "
<< det.box.width << ", " << det.box.height << ")";
}
qDebug() << "有效检测数量:" << detections.size();
qDebug() << "=== 后处理完成 ===";
return detections;
}
// 绘制检测结果
void QtWidgetsApplication10::drawDetections(cv::Mat& image, const std::vector<Detection>& detections)
{
for (const auto& detection : detections) {
// 选择颜色(基于类别ID)
cv::Scalar color = colors[detection.classId % colors.size()];
// 绘制边界框
cv::rectangle(image, detection.box, color, 2);
// 创建标签
std::string label = "Class " + std::to_string(detection.classId);
label += " " + std::to_string(detection.conf).substr(0, 4);
// 计算标签背景尺寸
int baseLine;
cv::Size labelSize = cv::getTextSize(label, cv::FONT_HERSHEY_SIMPLEX, 0.5, 1, &baseLine);
// 绘制标签背景
cv::rectangle(image,
cv::Point(detection.box.x, detection.box.y - labelSize.height - baseLine),
cv::Point(detection.box.x + labelSize.width, detection.box.y),
color, cv::FILLED);
// 绘制标签文本
cv::putText(image, label,
cv::Point(detection.box.x, detection.box.y - baseLine),
cv::FONT_HERSHEY_SIMPLEX, 0.5, cv::Scalar(255, 255, 255), 1);
}
}
// 更新显示
void QtWidgetsApplication10::updateDisplay()
{
if (displayImage.empty()) return;
// 将OpenCV图像转换为Qt图像
cv::Mat rgbImage;
cv::cvtColor(displayImage, rgbImage, cv::COLOR_BGR2RGB);
QImage qimg(rgbImage.data, rgbImage.cols, rgbImage.rows,
rgbImage.step, QImage::Format_RGB888);
QPixmap pixmap = QPixmap::fromImage(qimg);
// 在QLabel中显示图像
ui.label->setPixmap(pixmap.scaled(ui.label->width(),
ui.label->height(),
Qt::KeepAspectRatio, Qt::SmoothTransformation));
}
// 模型加载函数
bool QtWidgetsApplication10::loadYOLOv11Model(const std::string& model_path)
{
try {
// 初始化ONNX Runtime环境
initializeONNXRuntime();
// 使用QString进行路径转换
QString qModelPath = QString::fromStdString(model_path);
std::wstring wideModelPath = qModelPath.toStdWString();
// 创建会话
session = std::make_unique<Ort::Session>(*env, wideModelPath.c_str(), sessionOptions);
// 获取模型输入输出信息
Ort::AllocatorWithDefaultOptions allocator;
// 清空之前的存储
inputNamesStr.clear();
inputNames.clear();
inputNodeDims.clear();
outputNamesStr.clear();
outputNames.clear();
outputNodeDims.clear();
// 获取输入信息
size_t numInputNodes = session->GetInputCount();
for (size_t i = 0; i < numInputNodes; i++) {
auto inputName = session->GetInputNameAllocated(i, allocator);
inputNamesStr.push_back(std::string(inputName.get()));
inputNames.push_back(inputNamesStr.back().c_str());
Ort::TypeInfo inputTypeInfo = session->GetInputTypeInfo(i);
auto inputTensorInfo = inputTypeInfo.GetTensorTypeAndShapeInfo();
auto inputDims = inputTensorInfo.GetShape();
inputNodeDims.push_back(inputDims);
qDebug() << "输入名称:" << inputNamesStr.back().c_str();
qDebug() << "输入维度:";
for (auto dim : inputDims) {
qDebug() << dim;
}
}
// 获取输出信息
size_t numOutputNodes = session->GetOutputCount();
for (size_t i = 0; i < numOutputNodes; i++) {
auto outputName = session->GetOutputNameAllocated(i, allocator);
outputNamesStr.push_back(std::string(outputName.get()));
outputNames.push_back(outputNamesStr.back().c_str());
Ort::TypeInfo outputTypeInfo = session->GetOutputTypeInfo(i);
auto outputTensorInfo = outputTypeInfo.GetTensorTypeAndShapeInfo();
auto outputDims = outputTensorInfo.GetShape();
outputNodeDims.push_back(outputDims);
qDebug() << "输出名称:" << outputNamesStr.back().c_str();
qDebug() << "输出维度:";
for (auto dim : outputDims) {
qDebug() << dim;
}
}
// 从输入维度中获取实际的输入高度和宽度
if (!inputNodeDims.empty() && inputNodeDims[0].size() == 4) {
inpHeight = static_cast<int>(inputNodeDims[0][2]);
inpWidth = static_cast<int>(inputNodeDims[0][3]);
qDebug() << "模型输入尺寸:" << inpHeight << "x" << inpWidth;
}
// 打印模型信息
printModelInfo();
return true;
}
catch (const Ort::Exception& e) {
qDebug() << "ONNX Runtime错误:" << e.what();
return false;
}
catch (const std::exception& e) {
qDebug() << "标准异常:" << e.what();
return false;
}
}
void QtWidgetsApplication10::initializeONNXRuntime()
{
env = std::make_unique<Ort::Env>(ORT_LOGGING_LEVEL_WARNING, "YOLOv11");
runOptions = Ort::RunOptions();
}
void QtWidgetsApplication10::printModelInfo()
{
qDebug() << "=== YOLOv10模型信息 ===";
qDebug() << "输入尺寸:" << inpHeight << "x" << inpWidth;
qDebug() << "输入节点数量:" << session->GetInputCount();
qDebug() << "输出节点数量:" << session->GetOutputCount();
for (size_t i = 0; i < inputNamesStr.size(); i++) {
qDebug() << "输入" << i << ":" << inputNamesStr[i].c_str();
}
for (size_t i = 0; i < outputNamesStr.size(); i++) {
qDebug() << "输出" << i << ":" << outputNamesStr[i].c_str();
}
qDebug() << "=========================";
}三、完整项目下载
通过网盘分享的知识: