文章目录
- 引言
- 一、环形链表
-
- [1.1 思路解答 + 作图演示](#1.1 思路解答 + 作图演示)
- [1.2 算法验证](#1.2 算法验证)
- 二、环形链表Ⅱ
-
- [2.1 算法解答 + 作图演示](#2.1 算法解答 + 作图演示)
- [2.2 算法验证](#2.2 算法验证)
- 总结
引言
在链表的算法世界里,「环形」结构是一个经典且有趣的谜题。当链表的尾指针并非指向空,而是指向链表中某个先前的节点时,一个环便悄然形成。
本期,我们将聚焦于环形链表的两大核心问题:如何判断链表中是否存在环?以及,如果存在环,如何准确地找到环的起点?
一、环形链表
题目链接:141.环形链表(LeetCode)
- 题目描述:
给你一个链表的头节点 head ,判断链表中是否有环。
如果链表中有某个节点,可以通过连续跟踪 next 指针再次到达,则链表中存在环。
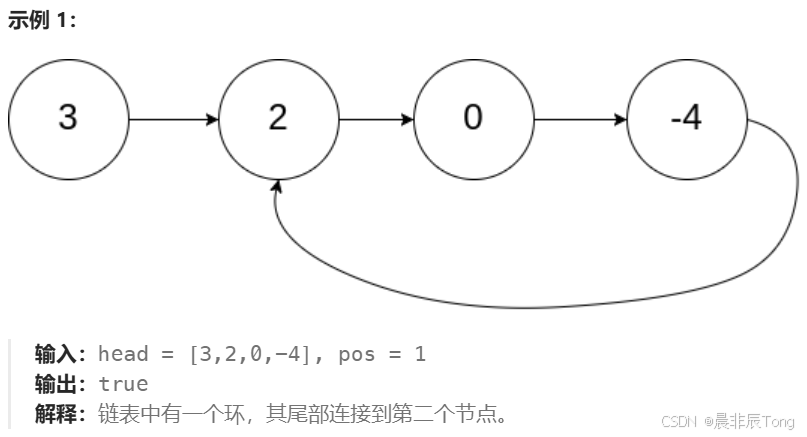
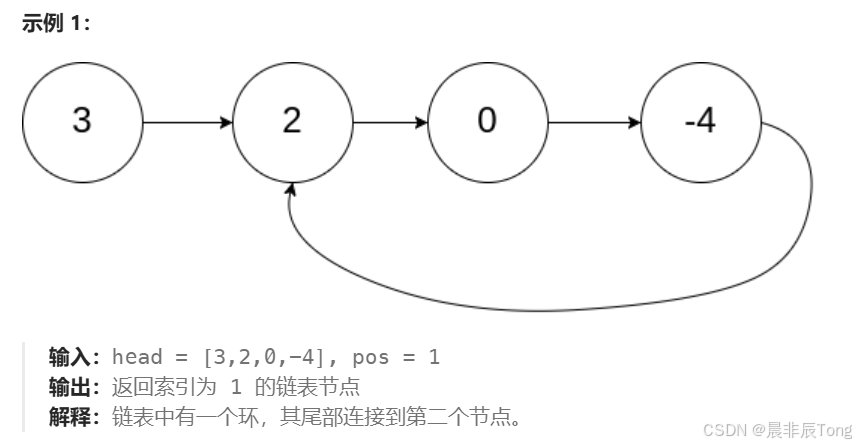
(为了表示给定链表中的环,评测系统内部使用整数 pos 来表示链表尾连接到链表中的位置(索引从 0 开始)。注意:pos 不作为参数进行传递 。仅仅是为了标识链表的实际情况。)
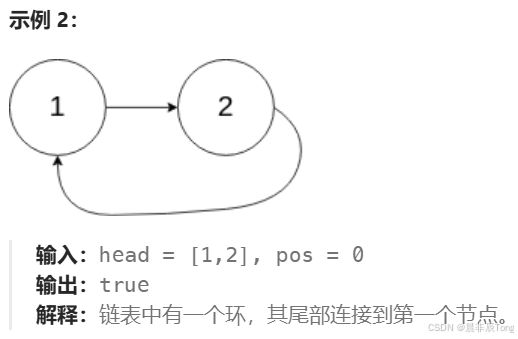
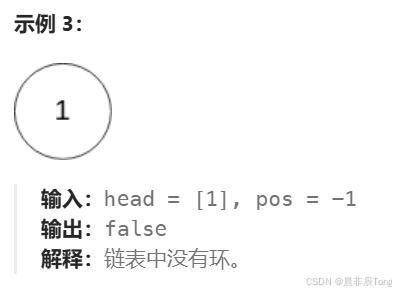
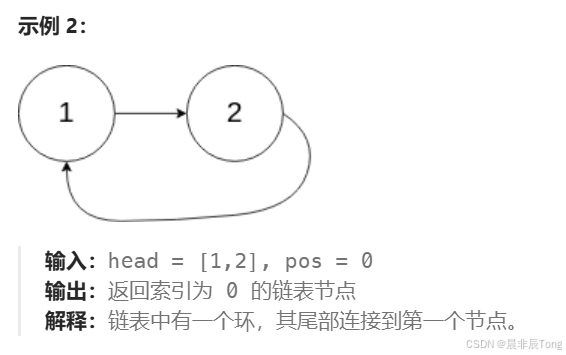
- 实现示例:
1.1 思路解答 + 作图演示
- 算法思路:
简单来看,就是判断链表的尾节点不为空(NULL)。那么该如何操作呢?
-
上一篇博客提到的方法,将链表转换为数组,再进行操作。对于这个算法题来说,转换为数组后在数组内部遍历比较。(有条件限制,废弃)
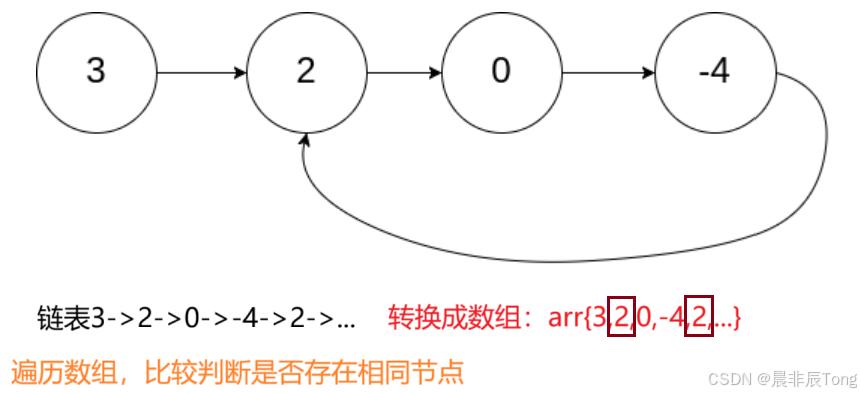
经过作图,此方法将链表转换为数组后再判断确实可以。但是别忘了一个重要的前提,题目要给出链表的最大长度!! (上一篇博客中提到:回文链表)
可惜,看完题目要求,没有给出相关条件,那么不能用这个方法!
-
使用快慢指针,慢指针走1步,快指针走2步,看是否指针会相遇。
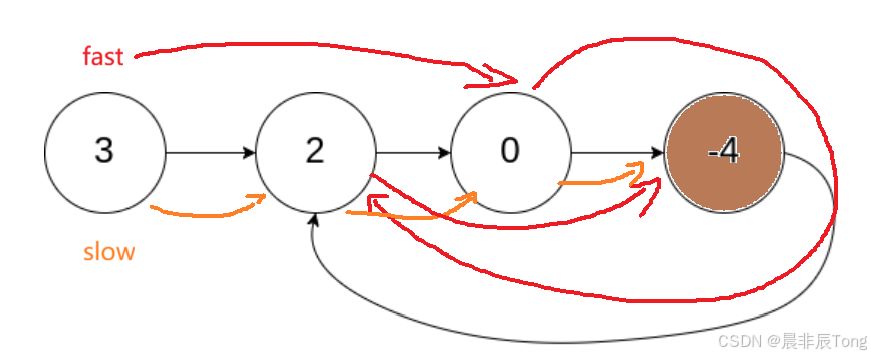
经过作图,最终快慢指针在节点数值为4的地方相遇,表示链表为环形链表。
1.2 算法验证
- 验证思路2:使用快慢指针,观察指针是否会相遇。
c
/**
* Definition for singly-linked list.
* struct ListNode {
* int val;
* struct ListNode *next;
* };
*/
typedef struct ListNode ListNode;
bool hasCycle(struct ListNode *head)
{
//定义快慢指针
ListNode* fast = head;
ListNode* slow = head;
//循环,开始追赶
while(fast && fast->next)
{
//慢走1步,快走2步
slow = slow->next;
fast = fast->next->next;
if(fast == slow)
{
return true;
}
}
//循环外,没有相遇
return false;
}
- 验证思路合理性
- 证明1:在环形链表中,慢指针走1步,快指针走2步,最终一定会相遇?为什么?
先说答案:一定会相遇!
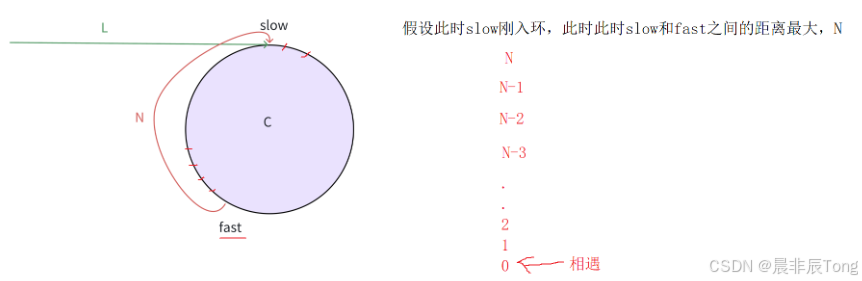
要明确:快指针比慢指针先进入环形部分 。假设两个指针之间的距离差值为N,那么移动后就是N+1-2 = N-1,反复进行,也就是说每次距离差值缩小1位。这就好说了,不管N有多大,只要-1-1-1......最终都会归0,也就是相遇。
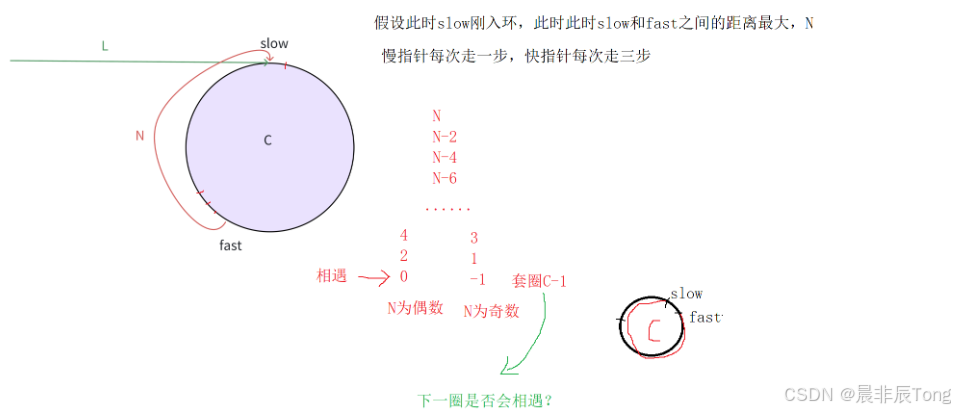
- 证明2:在环形链表中,慢指针走1步,快指针走2、3、4......步,还会相遇吗?
那可就不一定相遇了!!
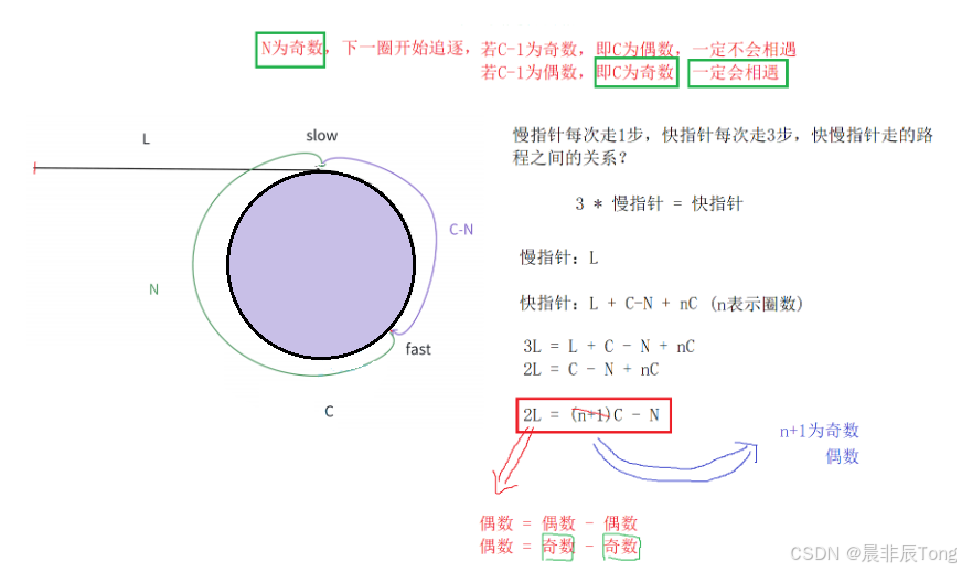
经过上面的一系列证明,得出:在以后的算法使用快慢指针时,还是慢指针走1步、快指针走2步比较稳妥!
二、环形链表Ⅱ
题目链接:142.环形链表Ⅱ(LeetCode)
- 题目描述:
给定一个链表的头节点 head ,返回链表开始入环的第一个节点 。 如果链表无环,则返回 null。
如果链表中有某个节点,可以通过连续跟踪 next 指针再次到达,则链表中存在环。
(为了表示给定链表中的环,评测系统内部使用整数 pos 来表示链表尾连接到链表中的位置(索引从 0 开始)。如果 pos 是 -1,则在该链表中没有环。注意:pos 不作为参数进行传递,仅仅是为了标识链表的实际情况。不能改变链表结构!)
- 实现示例:
- 题目提示:
- 链表中节点的数目范围在范围 0, 10^4^ 内;
-105 <= Node,val <= 105;pos的值为 -1 或者链表中的一个有效索引;
2.1 算法解答 + 作图演示
- 算法思路:
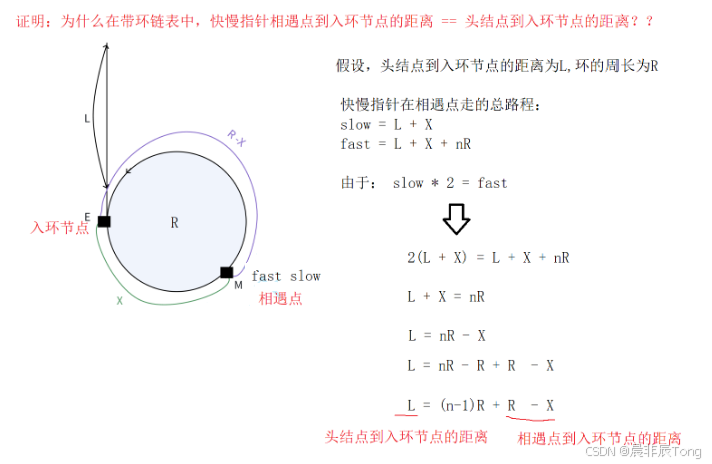
- 先利用快慢指针找出相遇的节点,再根据"头节点到入环节点的具体 = 相遇节点到入环节点的距离 ",定义一个节点从头节点开始移动,慢指针/快指针从相遇节点移动,等到新节点和慢指针相遇,所处位置就是入环节点的位置。
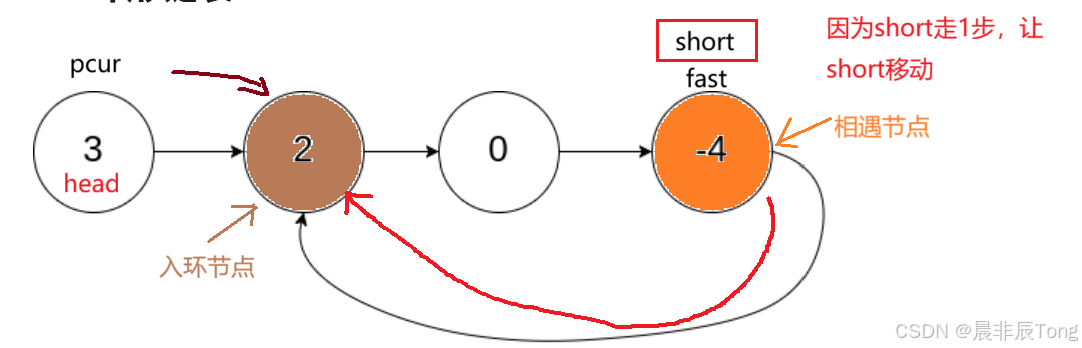
借用上一题的思路,找到相遇节点(-4)后,再新定义新节点pcur指向头节点,依据距离关系的推理(后面有验证),让pcur,short同步移动直到二者相遇,此为入环节点(2)。
2.2 算法验证
c
/**
* Definition for singly-linked list.
* struct ListNode {
* int val;
* struct ListNode *next;
* };
*/
typedef struct ListNode ListNode;
struct ListNode* detectCycle(struct ListNode* head)
{
//创建快慢指针
ListNode* slow = head;
ListNode* fast = head;
while (fast && fast->next)
{
slow = slow->next;
fast = fast->next->next;
if (slow == fast)
{
//相遇节点--找入环节点
ListNode* pcur = head;
while (pcur != slow)
{
pcur = pcur->next;
slow = slow->next;
}
return pcur;
}
}
return NULL;
}- 验证思路合理性:
总结
html
🍓 我是晨非辰Tong!若这篇技术干货帮你打通了学习中的卡点:
👀 【关注】跟我一起深耕技术领域,从基础到进阶,见证每一次成长
❤️ 【点赞】让优质内容被更多人看见,让知识传递更有力量
⭐ 【收藏】把核心知识点、实战技巧存好,需要时直接查、随时用
💬 【评论】分享你的经验或疑问(比如曾踩过的技术坑?),一起交流避坑
🗳️ 【投票】用你的选择助力社区内容方向,告诉大家哪个技术点最该重点拆解
技术之路难免有困惑,但同行的人会让前进更有方向~愿我们都能在自己专注的领域里,一步步靠近心中的技术目标!结语:
环检测:快指针(步长2)与慢指针(步长1)若相遇,则证明链表存在环。该方法时间复杂度为O(n),空间复杂度为O(1),实现最优效率。
入口定位: 基于"头节点到入口距离等于相遇点到入口距离"的原理,分别从头部和相遇点出发同步移动,相遇处即为环入口。
算法价值: 快慢指针法提供了解决环形链表的完整方案,从检测到定位形成系统方法论,是处理链表问题的核心技巧。
