一、原理介绍
传统二阶LESO用于永磁同步电机在坐标系下两相反电动势的观测,由于其具有低通特性会存在明显的相位滞后,结合高阶LESO的思想设计三阶HLESO用于反电动输出观测。通过频域分析和伯德图分析可知,三阶的HLESO的带宽明显增加,相位滞后明显减小。下面仿真结果表明三阶HLESO对反电动正弦信号波形观测的正弦度更高,相位滞后更小
二、仿真模型
在MATLAB/simulink里面验证所提算法,搭建仿真。采用和实验中一致的控制周期1e-4,电机部分计算周期为1e-6。仿真模型如下所示:
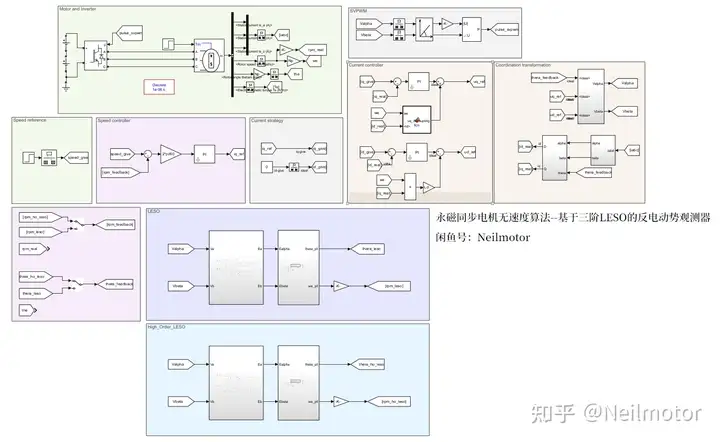
仿真工况:电机空载零速启动,0s阶跃给定转速1000rpm,0.5s施加额定负载并且给定转速阶跃至1500rpm。采用带宽法配置LESO和三阶LESO参数,保持两种观测器带宽相同。
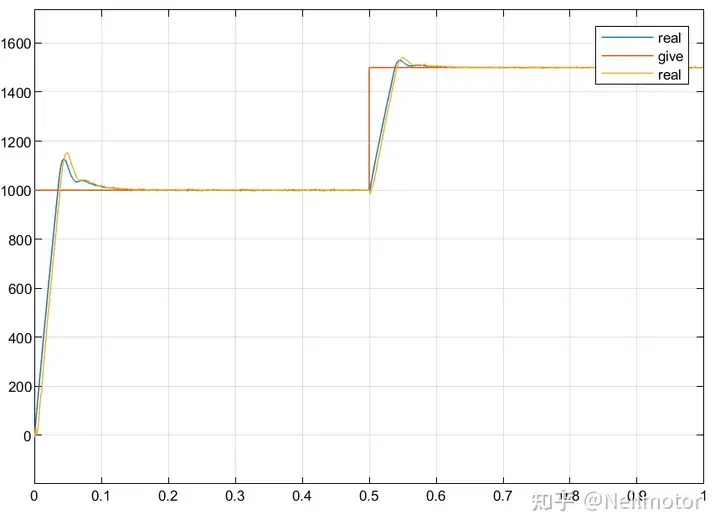
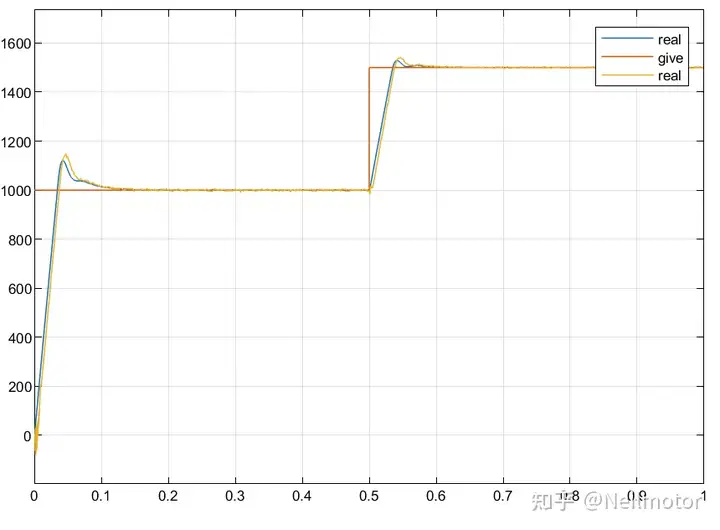
下面分别给出传统LESO和三阶LESO的仿真波形。
2.1给定转速、实际转速和估计转速
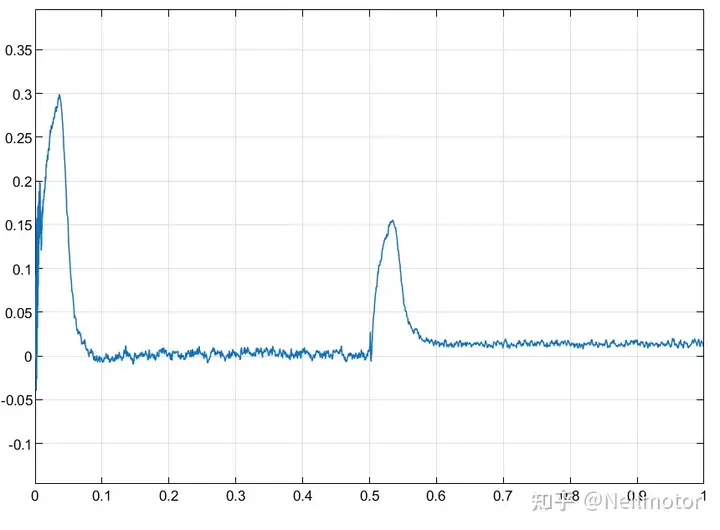
2.2估计转速与实际转速误差
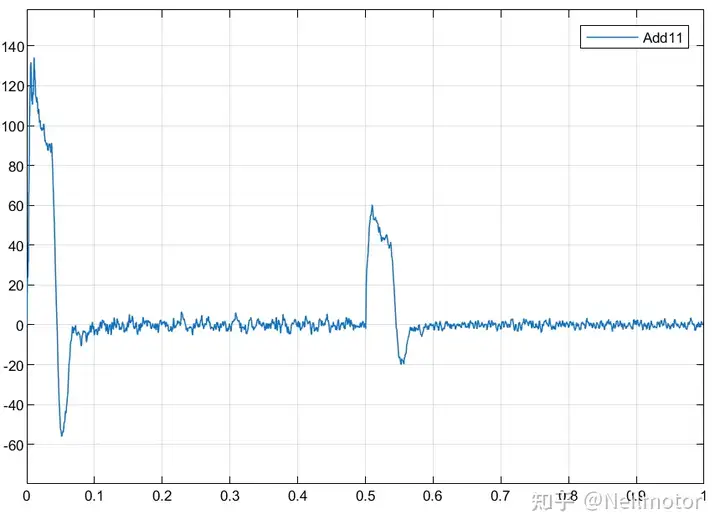
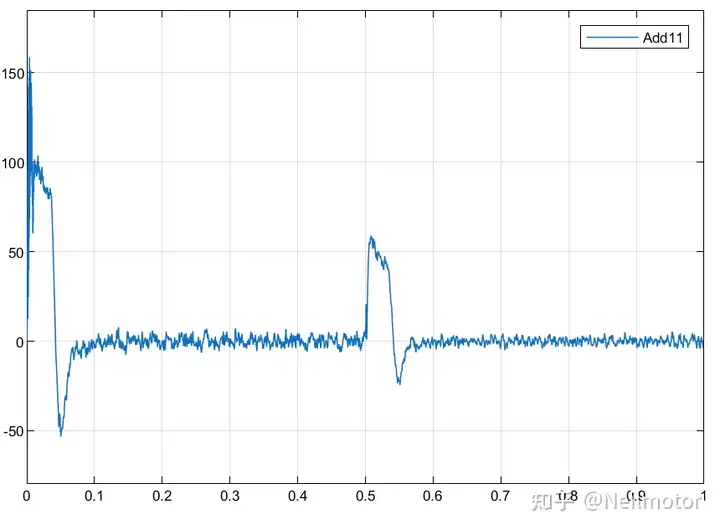
可以看出高阶LESO在启动阶段会存在毕竟明显的抖动,这是由于观测器引入了微分。优点是在转速变化和加载时的动态误差更小。
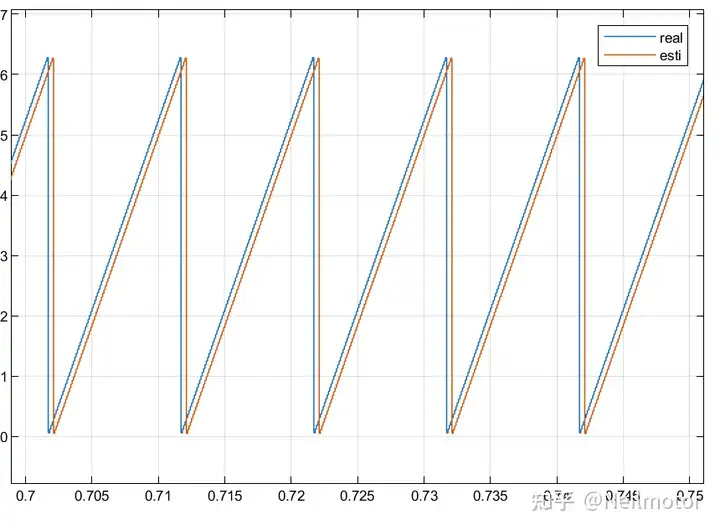
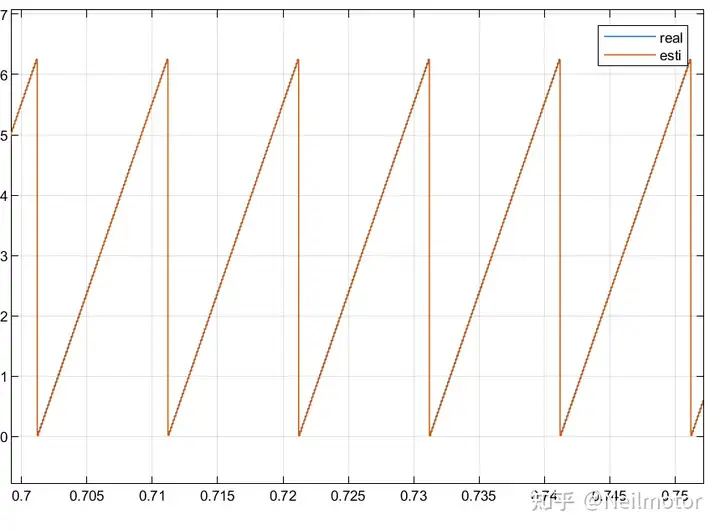
2.3估计转角与实际转角
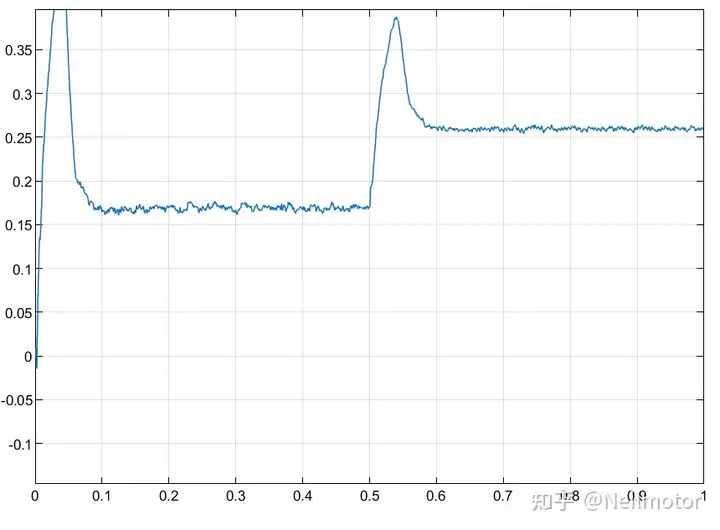
2.4估计转角与实际转角误差
2.5估计反电动势
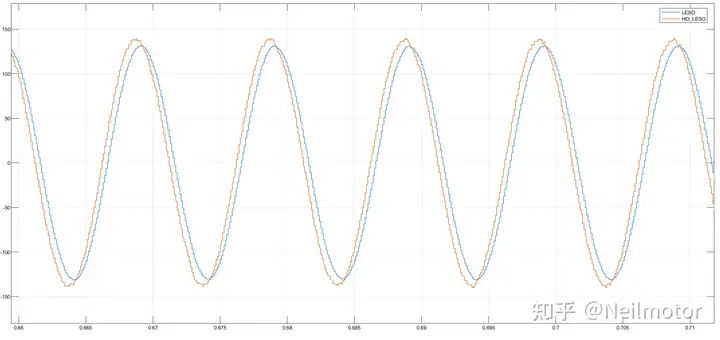
HLESO对反电动势观测值的滞后性更小,观测精度更高,结合归一化锁相环能准确估计出转子的位置信息。