2d图像可以看作3d的一个子空间
三维视觉:关注相机的位置姿态,三维场景的重构
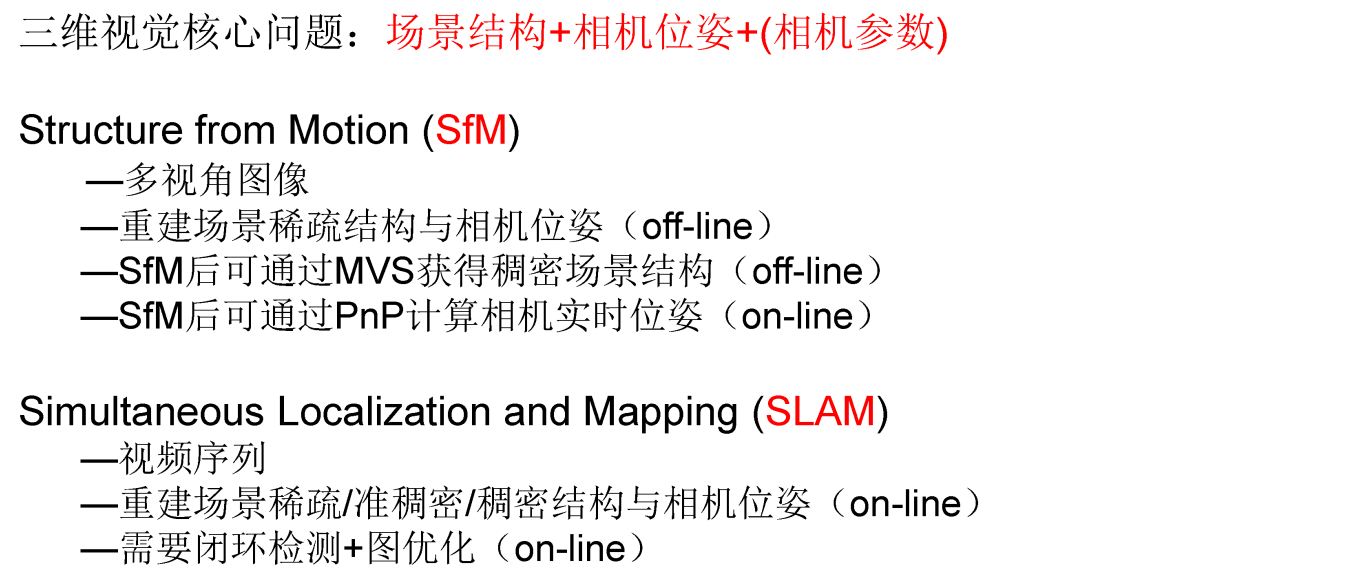
MVS = Multi-View Stereo,多视图立体重建
-
输入:多张已知相机位姿的图片(这些位姿通常由 SfM 算出来)。
-
目标:在每一个像素上估计可靠的深度,得到稠密点云/网格模型。
可以这么理解:
-
SfM :先用特征点匹配 +几何约束,只重建出稀疏的三维点(角点、特征点)和相机外参。
-
MVS :在 SfM 结果的基础上,利用多张图像之间的视差,把"空白区域"也补上,变成稠密三维结构(深度图、稠密点云、三角网格)
PnP = Perspective-n-Point 问题
-
已知:
-
一些三维点的坐标(世界坐标系里,通常是地图中的点);
-
它们在当前图像上的2D 像素位置;
-
相机内参(焦距、主点等)。
-
-
求:
- 当前相机相对于世界坐标系的位姿(R、t)------也就是"在什么位置、朝哪儿看"。
常见变体有 P3P、EPnP 等,通常会配合 RANSAC 使用来去除误匹配点。
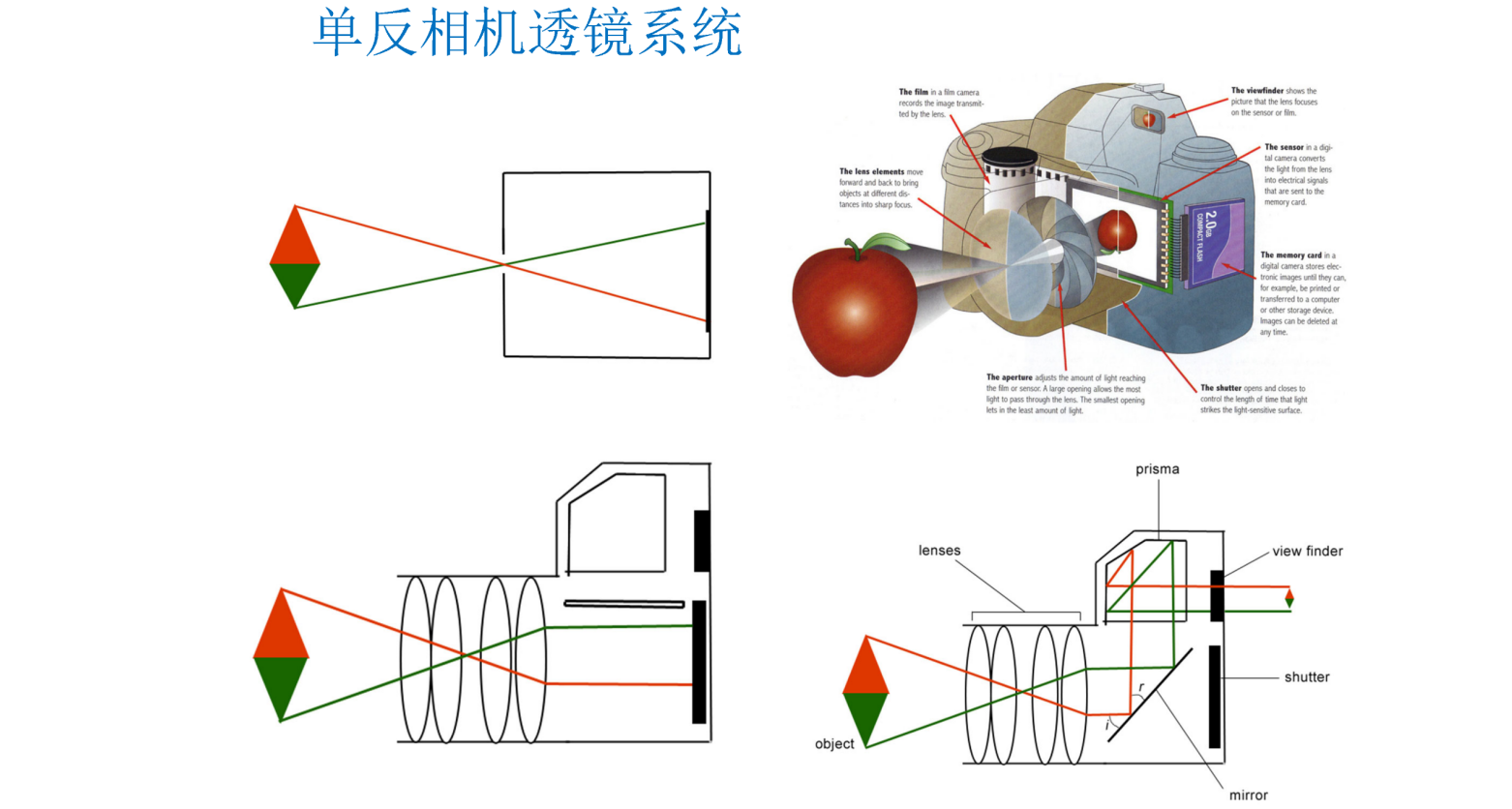
光圈过小可能产生衍射现象
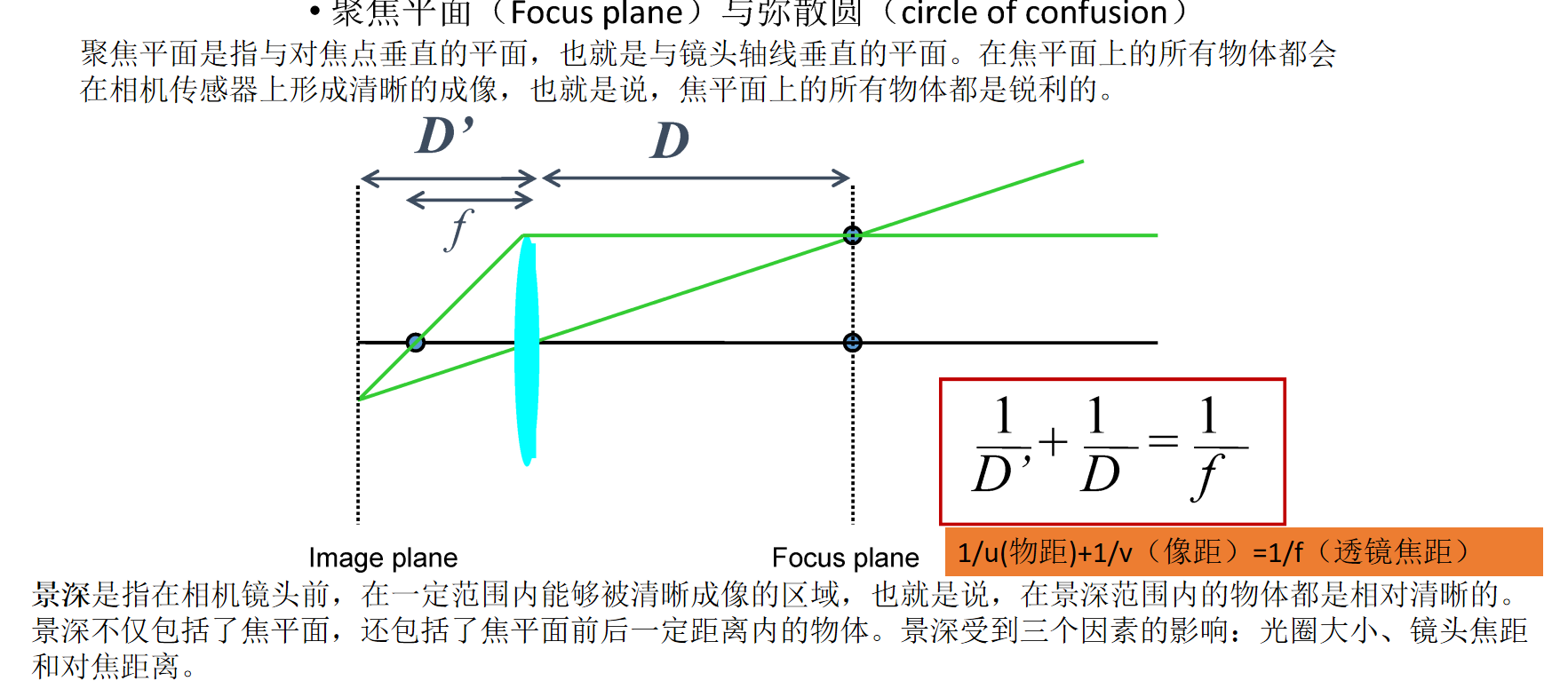
D'为相距,D为物距
公式非常重要!!!
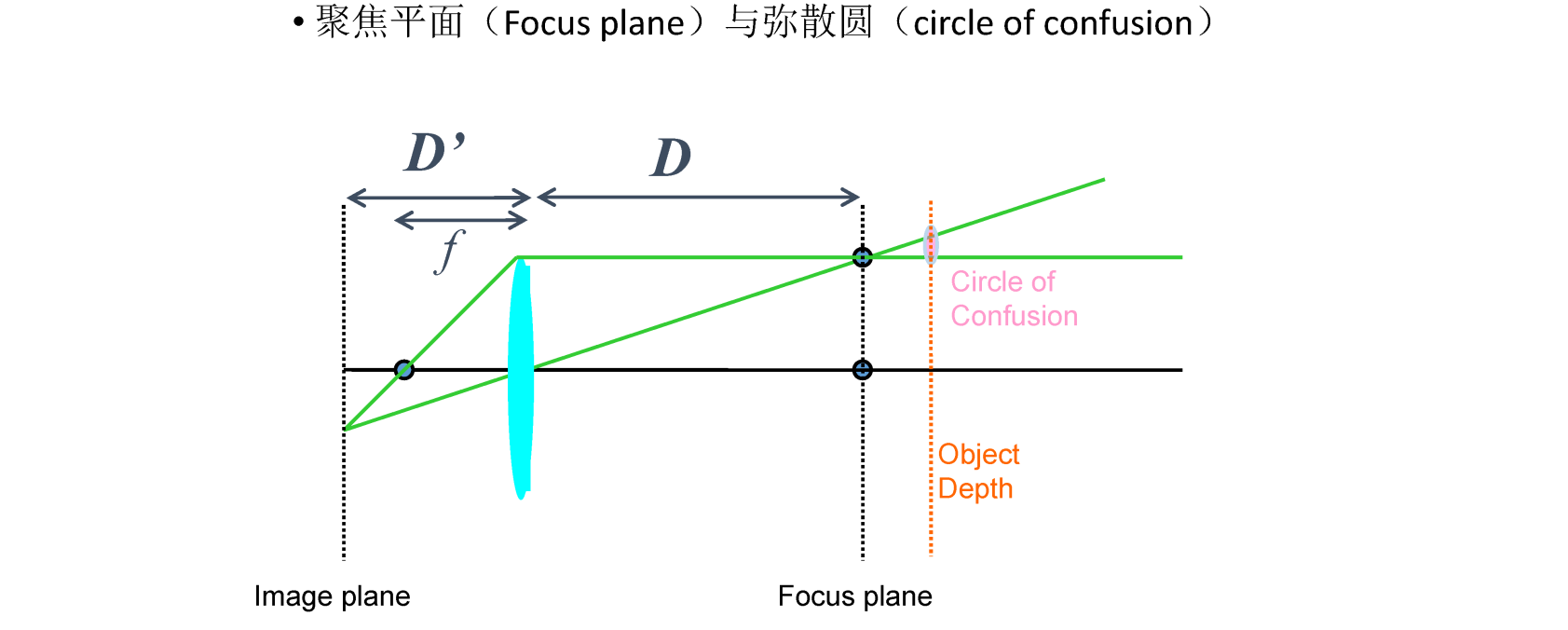
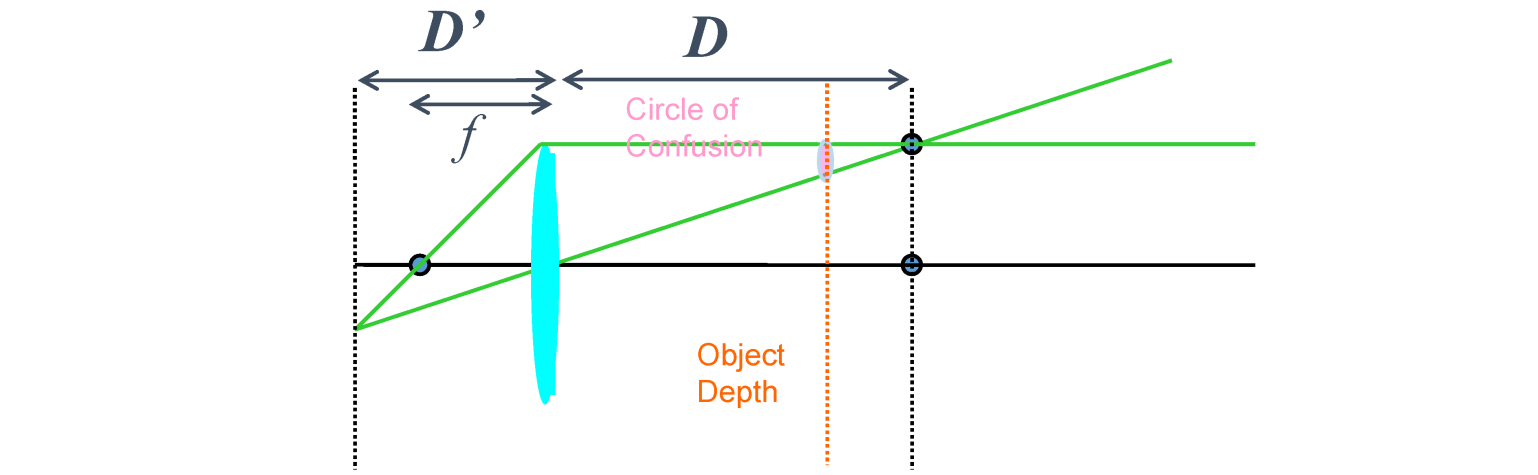
超出景深范围,有弥散圆,太远太近都不行
弥散圆:指的是物点成像时,由于像差,其成像光束不能会聚于一点,在像平面上形成一个扩散的圆形投影。弥散圆在焦点前后,光线开始聚集和扩散,点的影象变成模糊的,形成一个扩大的圆。
景深是个范围,受到光圈等影响

光圈是一个用来控制光线通进入镜头的装置,它通常是在镜头内,对于已经制造好的镜头,我们不可以随意的改变镜头的镜头,但是可以通过在镜头内部加入多边形或者圆形,并且面积可变的孔径光栅来达到控制镜头通光量。
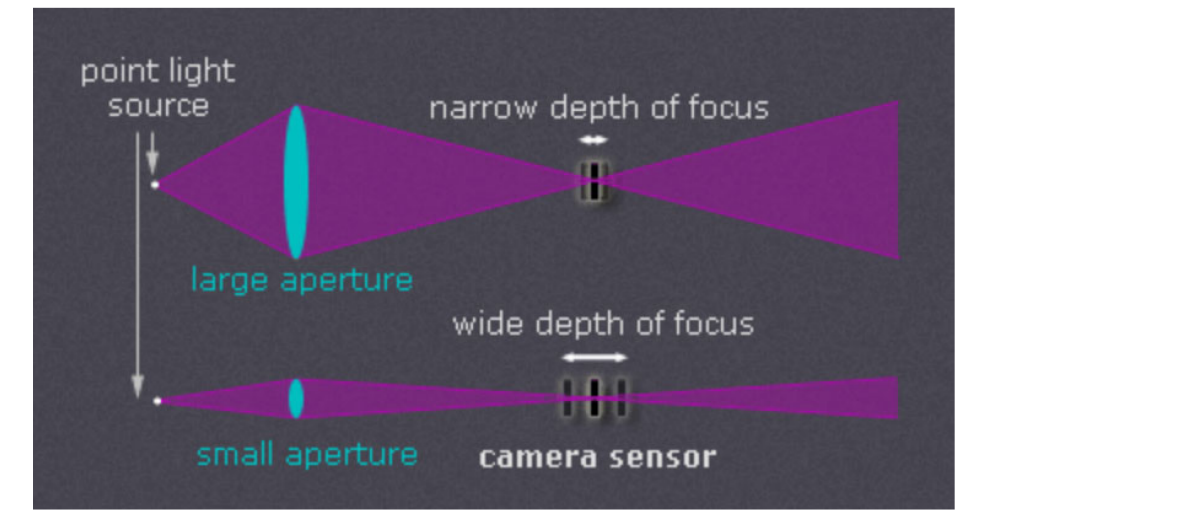
光圈越大景深越浅,光圈越小景深越深
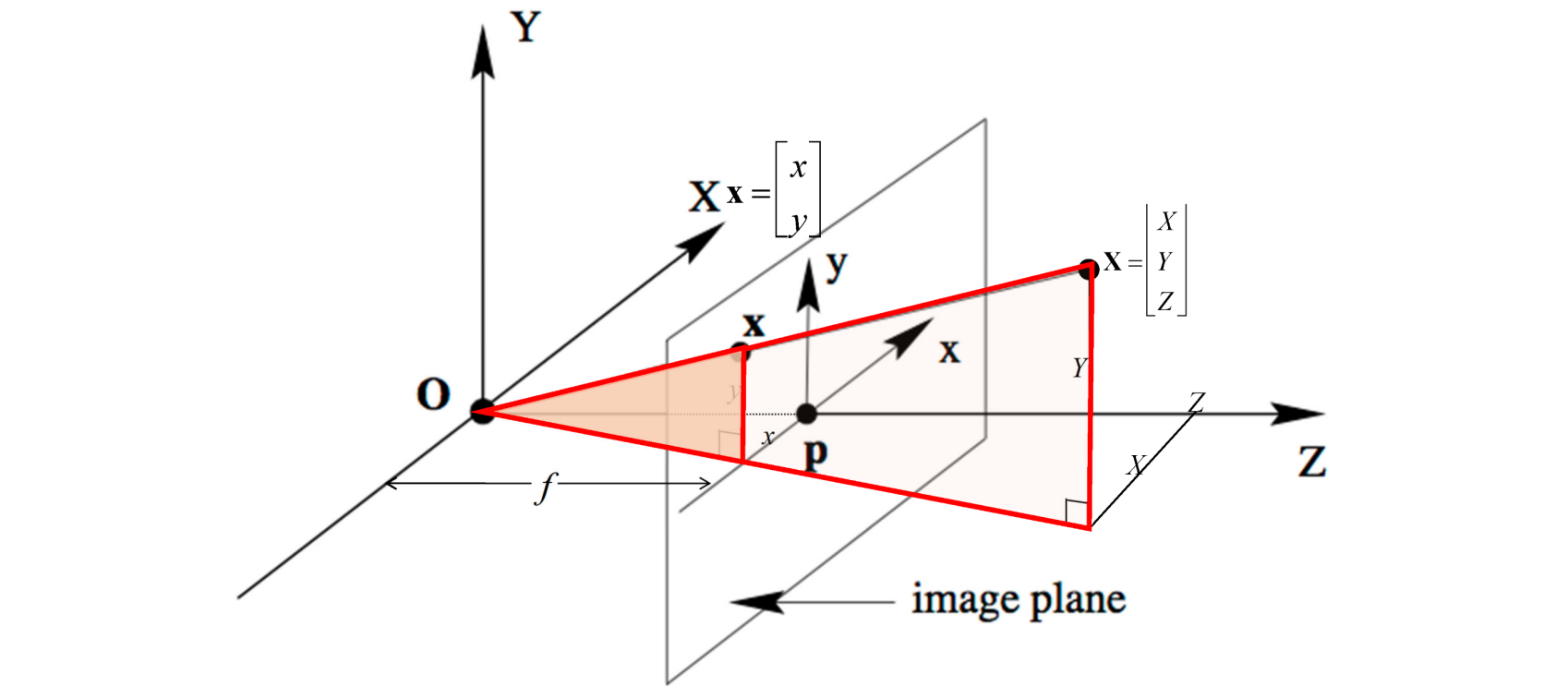
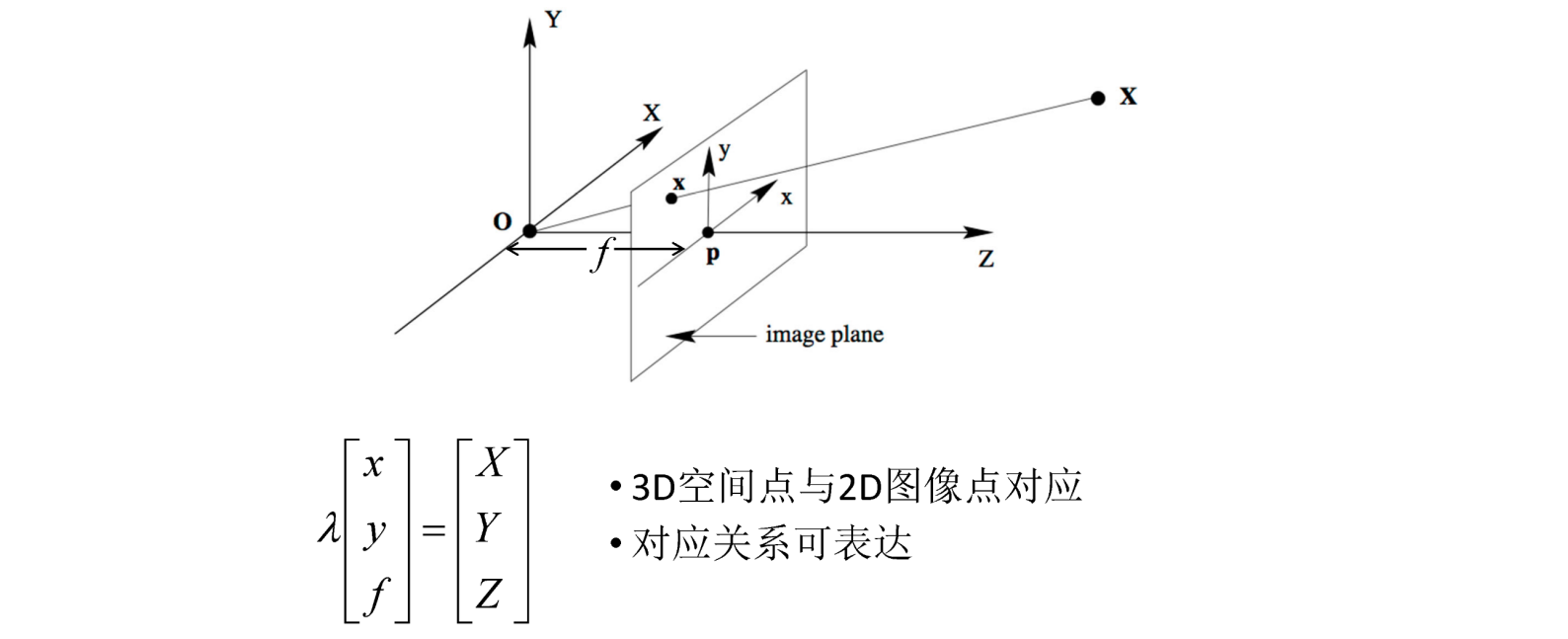
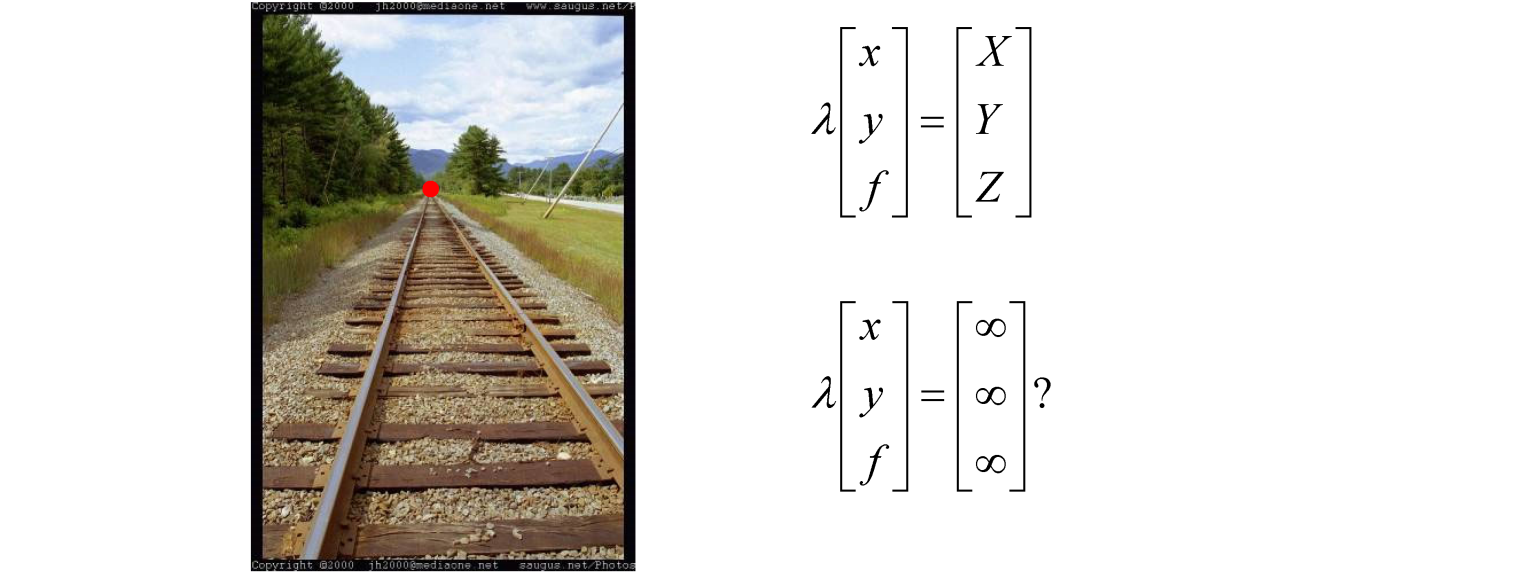
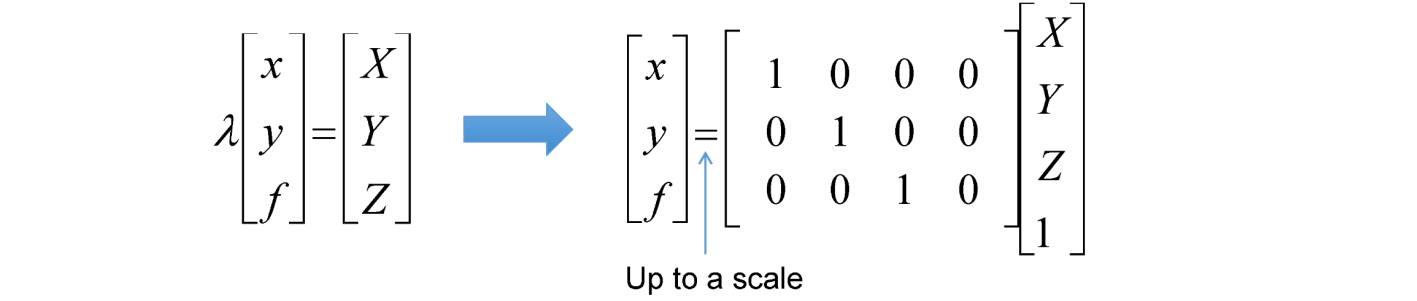
欧式空间到摄影空间的转化,从3d到2d,丢失了一定的信息
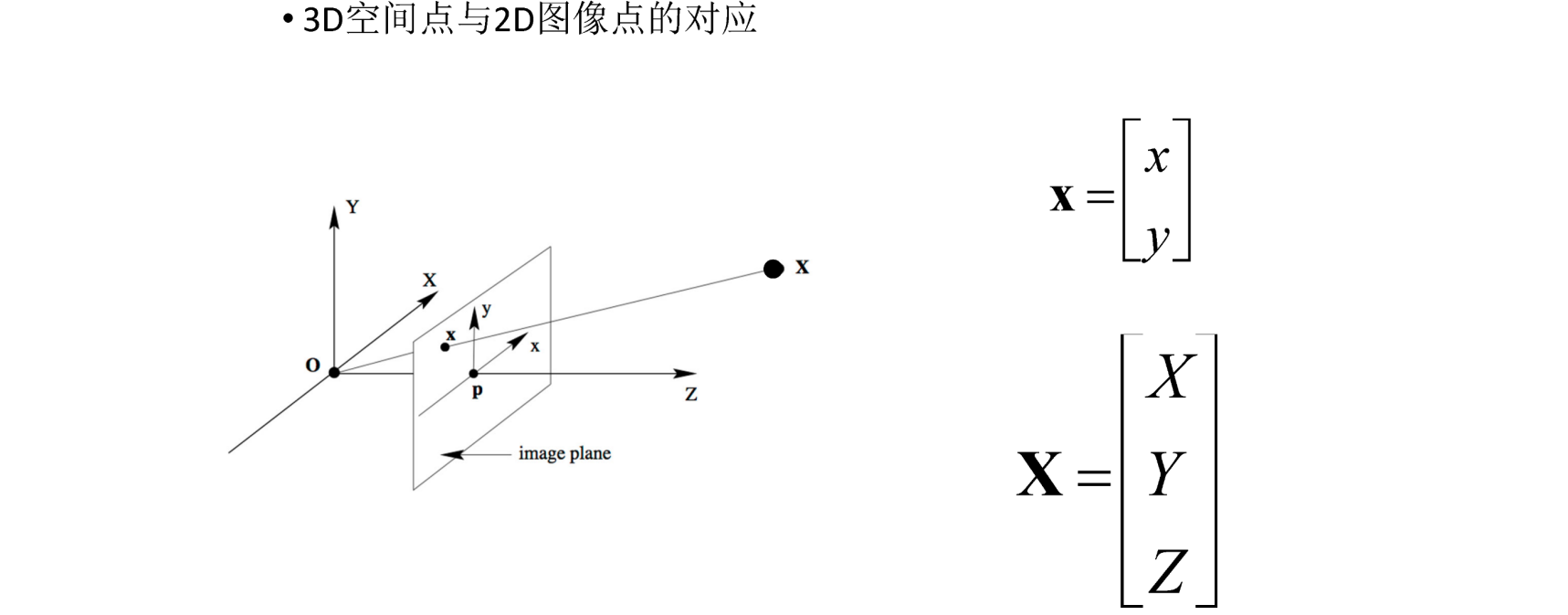
分别建立两个坐标系,图中有一定的约束关系
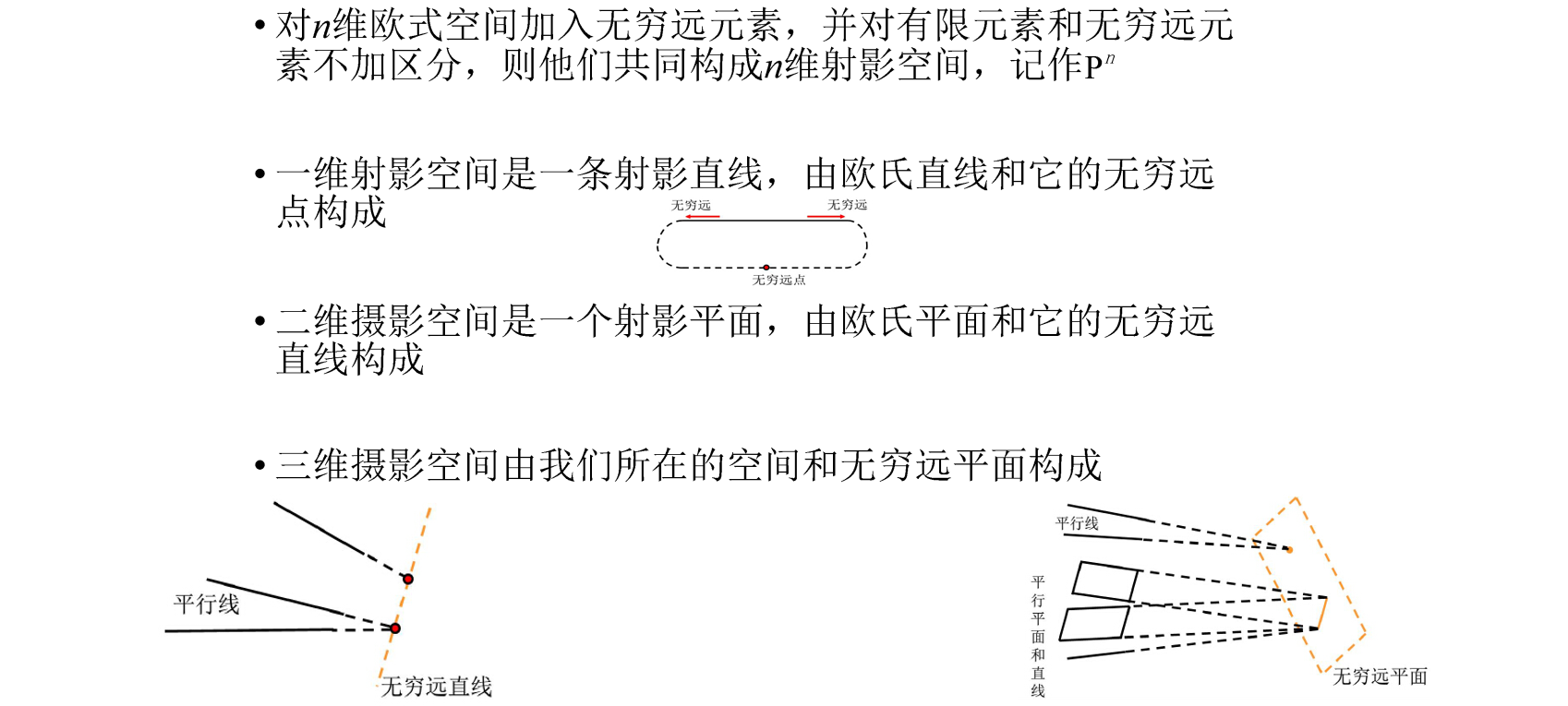
问题
- 在一条直线上只有唯一一个无穷远点
- 在一个平面上,所有的无穷远点组成一条直线,称为该平面的无穷远直线
- 三维空间中的所有无穷远点组成的一个平面,称为这个空间的无穷远平面
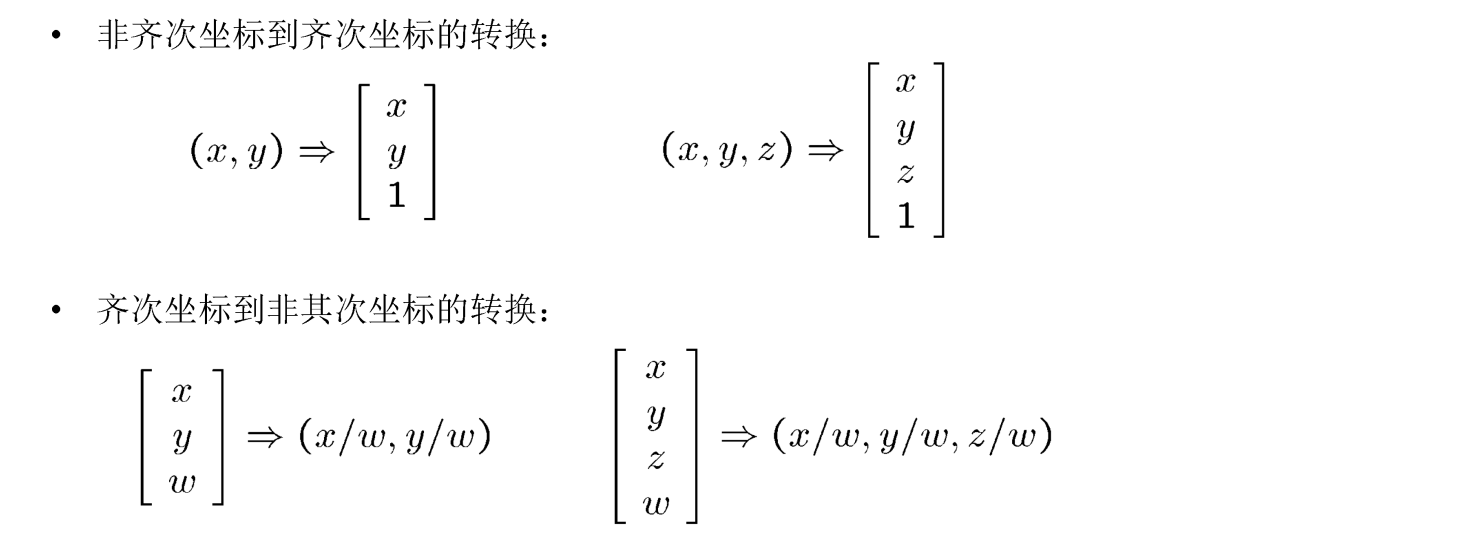
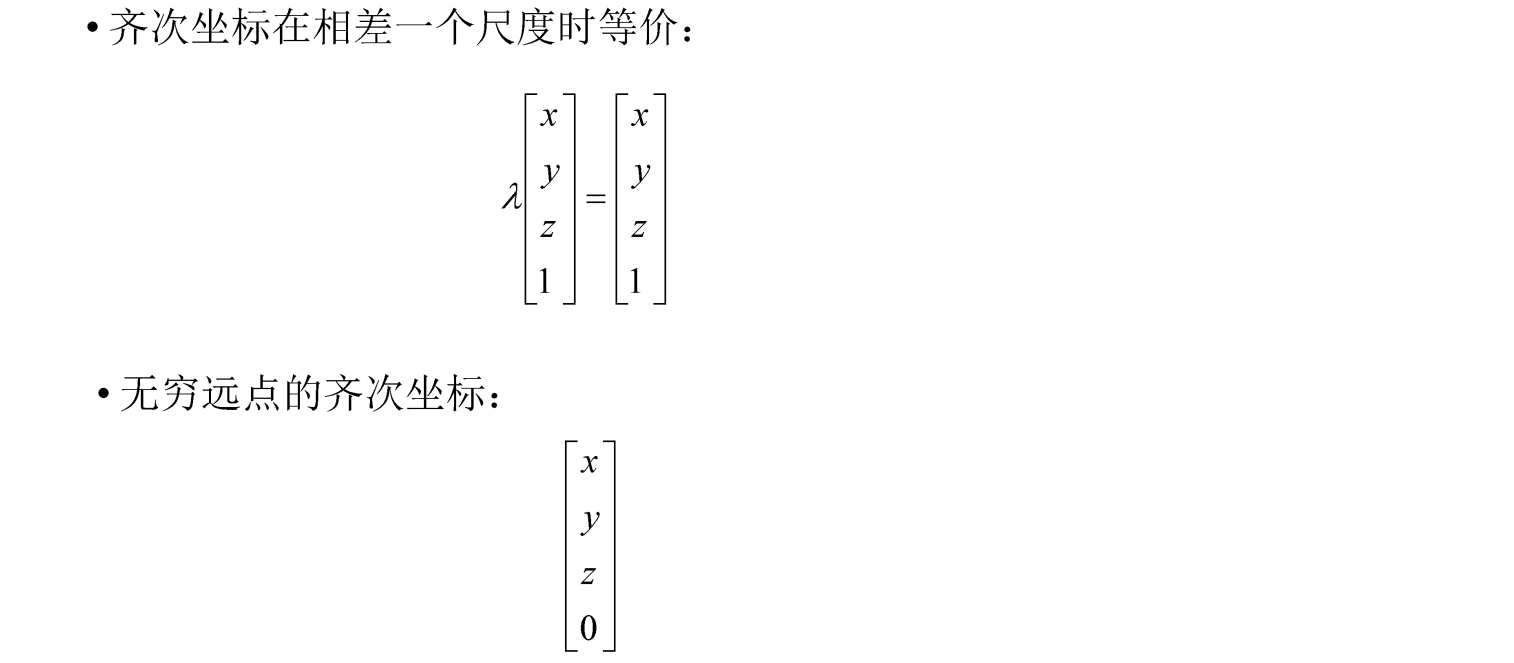
再加入齐次坐标(统一维度)
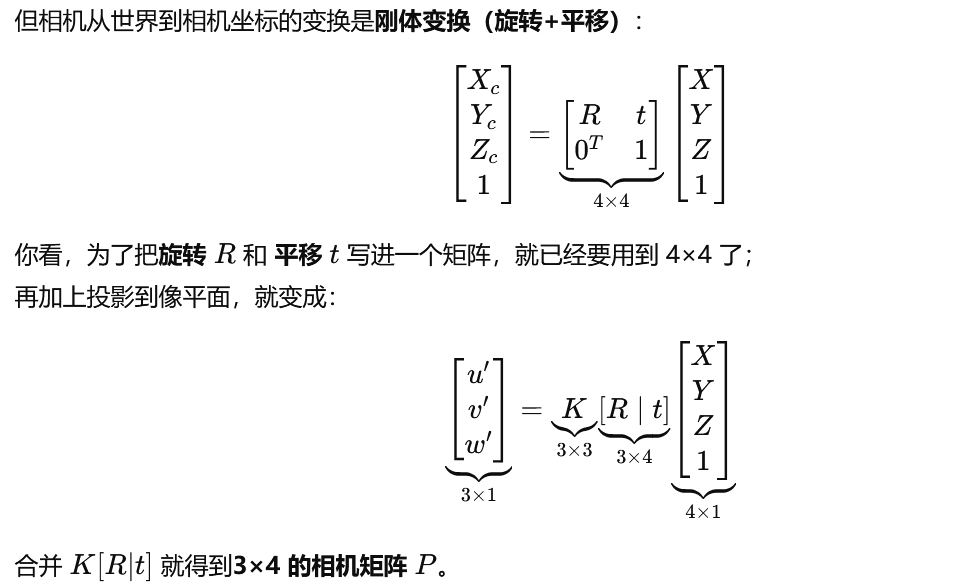
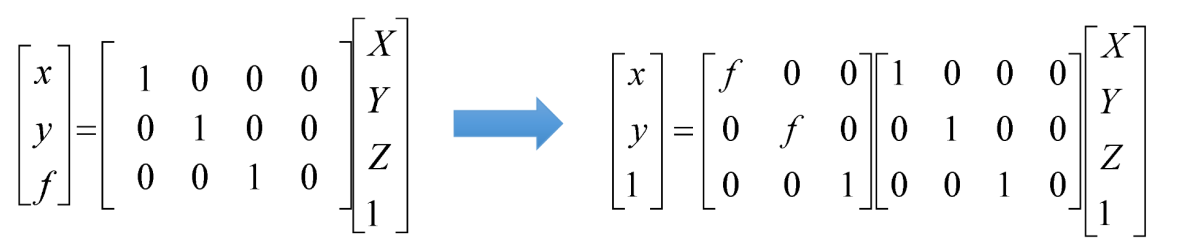
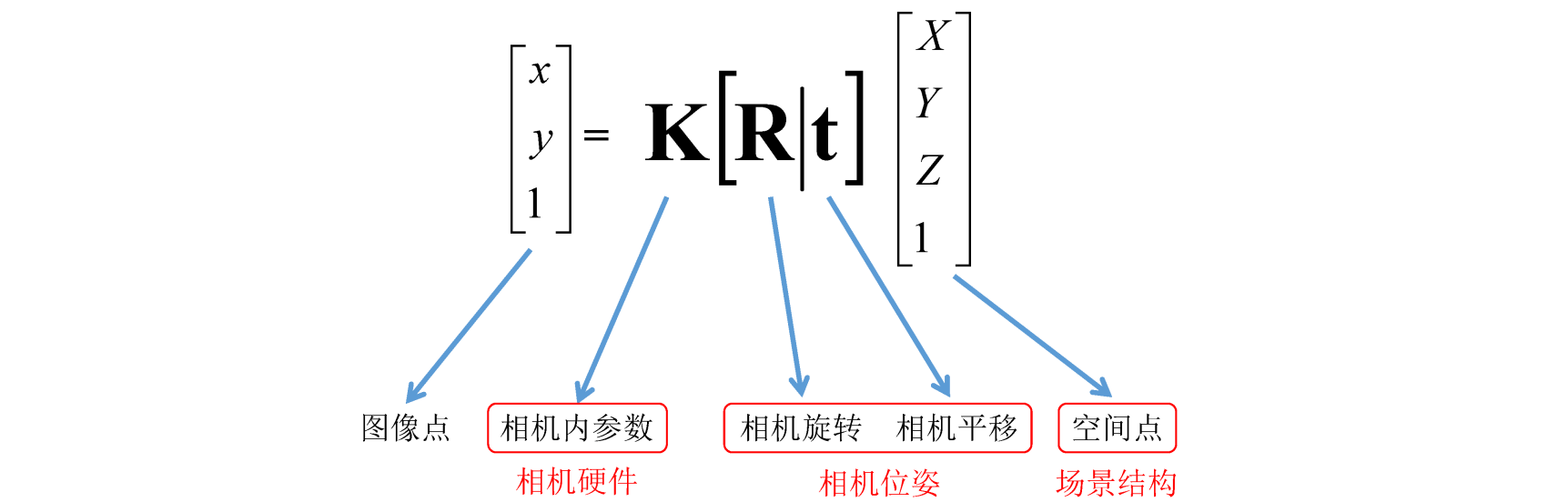
相机模型(重要!!!)
注意:f的单位改为像素
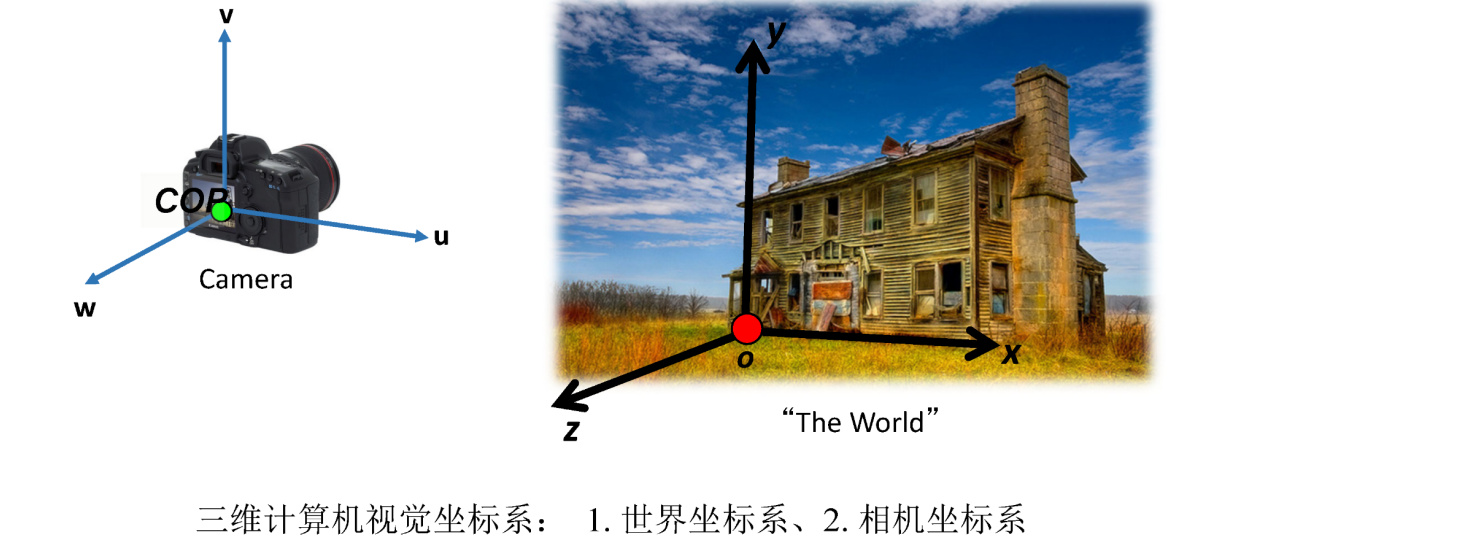
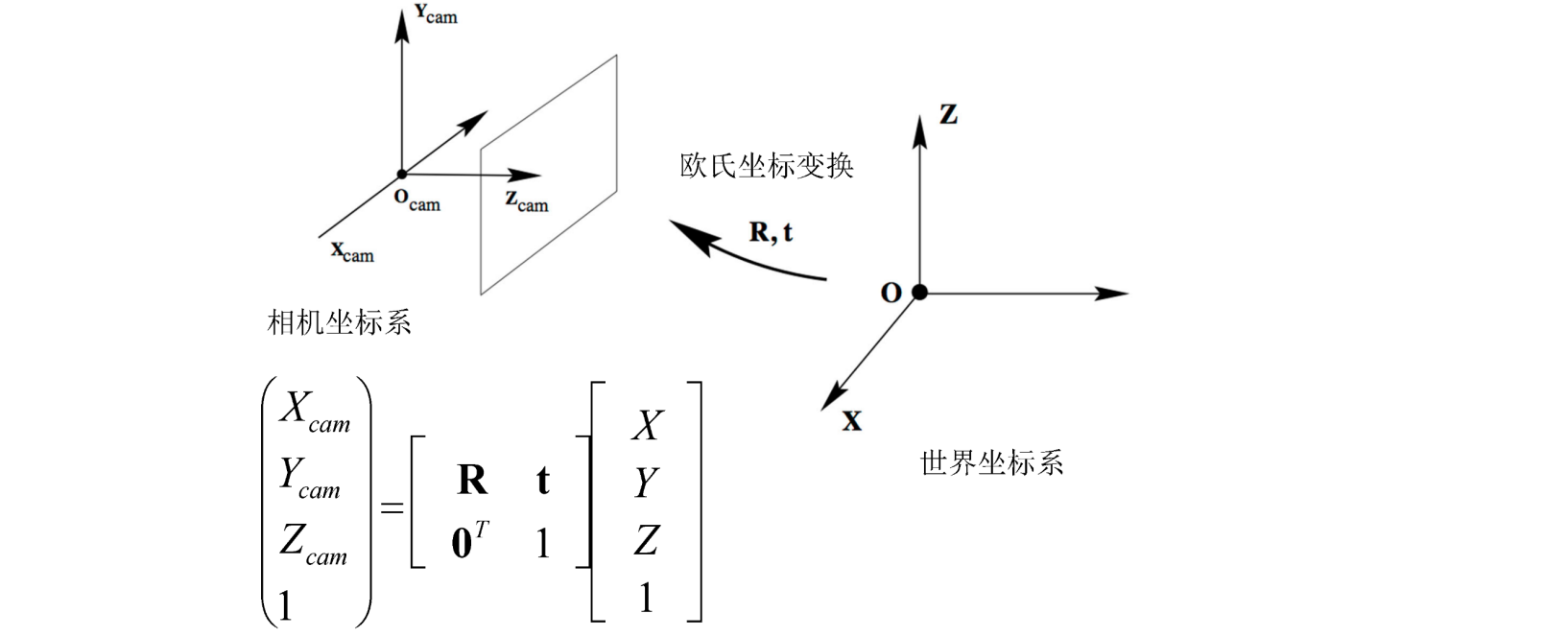
两个坐标系变化只有旋转、平移
最后得到投影与真实坐标之间的关系
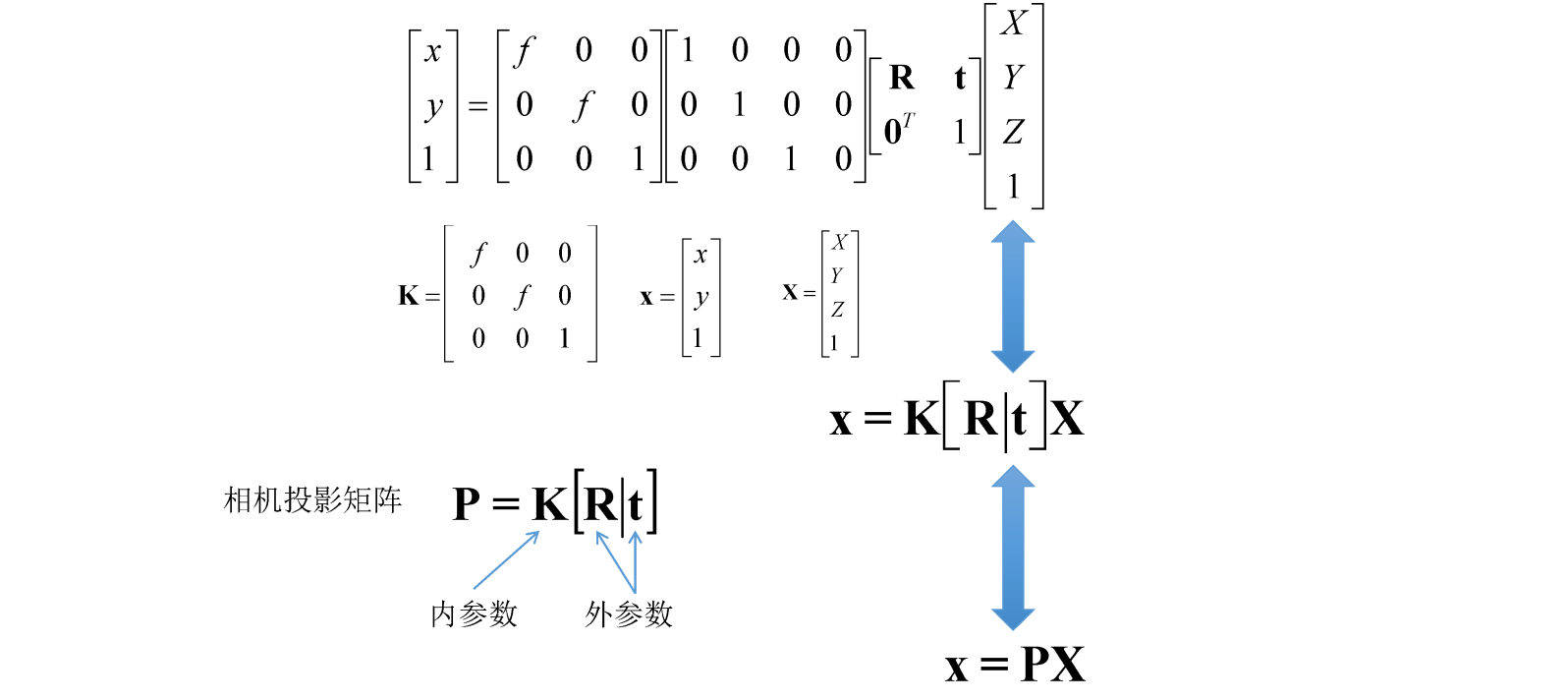
K为焦距的部分
R由于相机的姿态造成的旋转与平移(相对于世界坐标系而言)
公式非常重要!!!
对于矩阵的维度