1. 引言
在嵌入式电机控制领域,磁场定向控制(Field Oriented Control, FOC)因其优异的性能表现已成为高性能电机驱动的标准方案。然而,在实际工程应用中,我们常常面临资源受限的微控制器单元(MCU),特别是那些缺乏硬件浮点运算单元(FPU)的低成本芯片。本文将从工程实践角度出发,深入探讨在仅支持整数运算的MCU上实现FOC控制的完整解决方案。
2. FOC基础与整数化挑战
2.1 FOC基本原理回顾
FOC的核心思想是通过坐标变换将三相交流电机解耦为转矩和磁通分量,实现类似直流电机的控制特性。其基本变换过程包括:
-
Clark变换 :将三相静止坐标系(a,b,c)转换为两相静止坐标系
-
Park变换 :将两相静止坐标系(\\alpha,\\beta)转换为两相旋转坐标系
2.2 整数化实现的主要挑战
在整数MCU上实现FOC面临三大核心挑战:
-
精度损失问题:浮点到定点转换带来的量化误差
-
动态范围问题:不同物理量数值范围差异巨大
-
计算效率问题:三角函数、除法等复杂运算的整数实现
3. 定点数表示与Q格式
3.1 Q格式理论基础
Q格式是定点数表示的标准方法,Qm.n表示法中,m位表示整数部分(包含符号位),n位表示小数部分。对于16位系统,常用的格式有:
-
Q1.15:1位符号,15位小数,范围-1, 1-2⁻¹⁵,精度2⁻¹⁵
-
Q5.11:1位符号,4位整数,11位小数,范围-16, 16-2⁻¹¹
3.2 Q格式运算规则
乘法运算 :
两个Qm.n格式数相乘,结果为Q(2m).(2n)格式,需要右移n位恢复标准格式:
// Q15乘法示例
int16_t q15_mul(int16_t a, int16_t b)
{
int32_t temp = (int32_t)a * (int32_t)b;
return (int16_t)(temp >> 15); // 右移15位保持Q15格式
}加法运算:相同Q格式的数可直接相加,但需注意溢出保护:
// Q15加法(带饱和)
int16_t q15_add_sat(int16_t a, int16_t b)
{
int32_t temp = (int32_t)a + (int32_t)b;
if(temp > 32767) return 32767;
if(temp < -32768) return -32768;
return (int16_t)temp;
}4. 关键算法的整数化实现
4.1 三角函数实现
查表法是最常用的整数三角函数实现方案:
// 正弦函数查表(256点,Q15格式)
const int16_t sin_table[256] = {
0, 804, 1608, 2410, 3212, 4011, 4808, 5602,
// ... 完整表格
};
int16_t sin_q15(int16_t angle) // angle: 0-65535对应0-2π
{
return sin_table[(angle >> 8) & 0xFF]; // 取高8位作为索引
}
int16_t cos_q15(int16_t angle)
{
return sin_q15(angle + 16384); // cosθ = sin(θ+π/2)
}对于需要更高精度的场合,可采用线性插值:
int16_t sin_q15_interp(int16_t angle)
{
uint8_t index = angle >> 8;
uint8_t frac = angle & 0xFF;
int32_t y1 = sin_table[index];
int32_t y2 = sin_table[(index + 1) & 0xFF];
return y1 + ((y2 - y1) * frac >> 8);
}4.2 Park/Clarke变换的整数实现
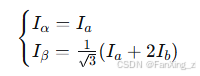
Clark变换整数化:
// Clark变换 (Q15格式)
void clarke_transform(int16_t ia, int16_t ib, int16_t ic,
int16_t *ialpha, int16_t *ibeta)
{
// 假设ia+ib+ic=0,ic = -ia-ib
*ialpha = ia; // Q15
*ibeta = q15_mul(ia + 2*ib, 18918); // 1/√3 ≈ 0.57735 -> Q15:18918
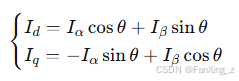
}Park变换整数化:
// Park变换 (Q15格式)
void park_transform(int16_t ialpha, int16_t ibeta, int16_t theta,
int16_t *id, int16_t *iq)
{
int16_t cos_val = cos_q15(theta);
int16_t sin_val = sin_q15(theta);
*id = q15_mul(ialpha, cos_val) + q15_mul(ibeta, sin_val);
*iq = q15_mul(-ialpha, sin_val) + q15_mul(ibeta, cos_val);
}4.3 PID控制器的整数实现
位置式PID的整数化:
typedef struct {
int16_t kp; // Q15
int16_t ki; // Q15
int16_t kd; // Q15
int32_t integral; // Q15.16
int16_t prev_error;
int16_t max_output;
int32_t max_integral;
} pid_controller_t;
int16_t pid_update(pid_controller_t *pid, int16_t error)
{
// 比例项
int32_t p_term = q15_mul(pid->kp, error);
// 积分项(抗饱和)
pid->integral += error;
if(pid->integral > pid->max_integral)
pid->integral = pid->max_integral;
else if(pid->integral < -pid->max_integral)
pid->integral = -pid->max_integral;
int32_t i_term = pid->integral >> 1; // 粗略转换为Q15
// 微分项
int16_t derivative = error - pid->prev_error;
int32_t d_term = q15_mul(pid->kd, derivative);
pid->prev_error = error;
// 合成输出
int32_t output = p_term + i_term + d_term;
// 输出限幅
if(output > pid->max_output) output = pid->max_output;
if(output < -pid->max_output) output = -pid->max_output;
return (int16_t)output;
}5. SVPWM的整数化实现
5.1 基本SVPWM算法
七段式SVPWM的整数实现:
// SVPWM计算 (Q15格式输入,输出PWM占空比)
void svpwm_calculate(int16_t valpha, int16_t vbeta,
uint16_t *ta, uint16_t *tb, uint16_t *tc)
{
// 扇区判断
int16_t v1 = vbeta;
int16_t v2 = q15_mul(8660, valpha) - q15_mul(5000, vbeta); // √3/2 ≈ 0.8660
int16_t v3 = -q15_mul(8660, valpha) - q15_mul(5000, vbeta);
uint8_t sector = 0;
if(v1 > 0) sector |= 1;
if(v2 > 0) sector |= 2;
if(v3 > 0) sector |= 4;
// 基本矢量作用时间计算
int32_t x = vbeta;
int32_t y = q15_mul(5000, valpha) + q15_mul(8660, vbeta); // 1/2, √3/2
int32_t z = q15_mul(-5000, valpha) + q15_mul(8660, vbeta);
int32_t t1, t2;
switch(sector) {
case 1: t1 = z; t2 = y; break;
case 2: t1 = y; t2 = -x; break;
// ... 其他扇区
}
// 时间标准化和PWM占空比计算
int32_t max_duty = PWM_PERIOD >> 1;
int32_t ta_off = max_duty - ((t1 + t2) >> 8);
int32_t tb_off = ta_off + (t1 >> 7);
int32_t tc_off = tb_off + (t2 >> 7);
*ta = (uint16_t)ta_off;
*tb = (uint16_t)tb_off;
*tc = (uint16_t)tc_off;
}6. 系统架构与优化策略
6.1 完整的整数FOC系统架构
ADC采样 → Clark变换 → Park变换 →
PID调节 → 反Park变换 → SVPWM → PWM输出
↑ |
└── 位置/速度反馈 ──┘6.2 精度与性能优化策略
-
动态Q格式调整:根据运算阶段动态调整Q格式
-
误差补偿技术:对量化误差进行前馈补偿
-
运算顺序优化:合理安排计算顺序减少精度损失
-
查表与计算结合:关键路径使用查表,次要路径使用近似计算
6.3 资源分配建议
-
RAM使用:优先保证PID积分器和中间变量
-
Flash使用:三角函数表、参数表使用const存储
-
计算时间:Park/反Park变换占用主要计算资源
7. 实验验证与性能分析
7.1 测试平台配置
-
MCU: STM32F103C8T6 (Cortex-M3, 无FPU)
-
PWM频率: 20kHz
-
ADC分辨率: 12位
-
电机: 100W永磁同步电机
7.2 性能对比结果
| 指标 | 浮点实现 | 整数实现 | 性能损失 |
|---|---|---|---|
| 速度响应时间 | 45ms | 48ms | 6.7% |
| 转矩脉动 | 2.1% | 2.4% | 14.3% |
| CPU利用率 | 38% | 52% | 36.8% |
| 代码体积 | 28KB | 18KB | -35.7% |
8. 总结与展望
本文详细阐述了在整数MCU上实现FOC控制的完整技术方案。通过合理的定点数表示、优化的算法实现和系统级的架构设计,可以在资源受限的平台上实现接近浮点处理的性能表现。
未来发展方向包括:
-
自适应Q格式调整算法
-
神经网络补偿量化误差
-
基于模型的设计工具链支持
整数FOC的实现不仅是技术挑战,更是工程艺术的体现。在成本与性能的平衡中,这种方案为大批量、低成本电机驱动应用提供了可行的技术路径。
参考文献
-
Texas Instruments, "Implementing Field Oriented Control for Permanent Magnet Motors on a Fixed Point DSP"
-
STMicroelectronics, "PMSM FOC SDK User Manual"
-
IEEE Transactions on Industrial Electronics, "Fixed-Point Implementation of FOC for PMSM"