目录
- Cartographer纯定位效果
- [pbstream 地图保存](#pbstream 地图保存)
-
- [C++代码(保存pbstream 地图)](#C++代码(保存pbstream 地图))
- [launch 启动文件](#launch 启动文件)
- [nav2 导航配置](#nav2 导航配置)
- [cartographer 纯定位配置](#cartographer 纯定位配置)
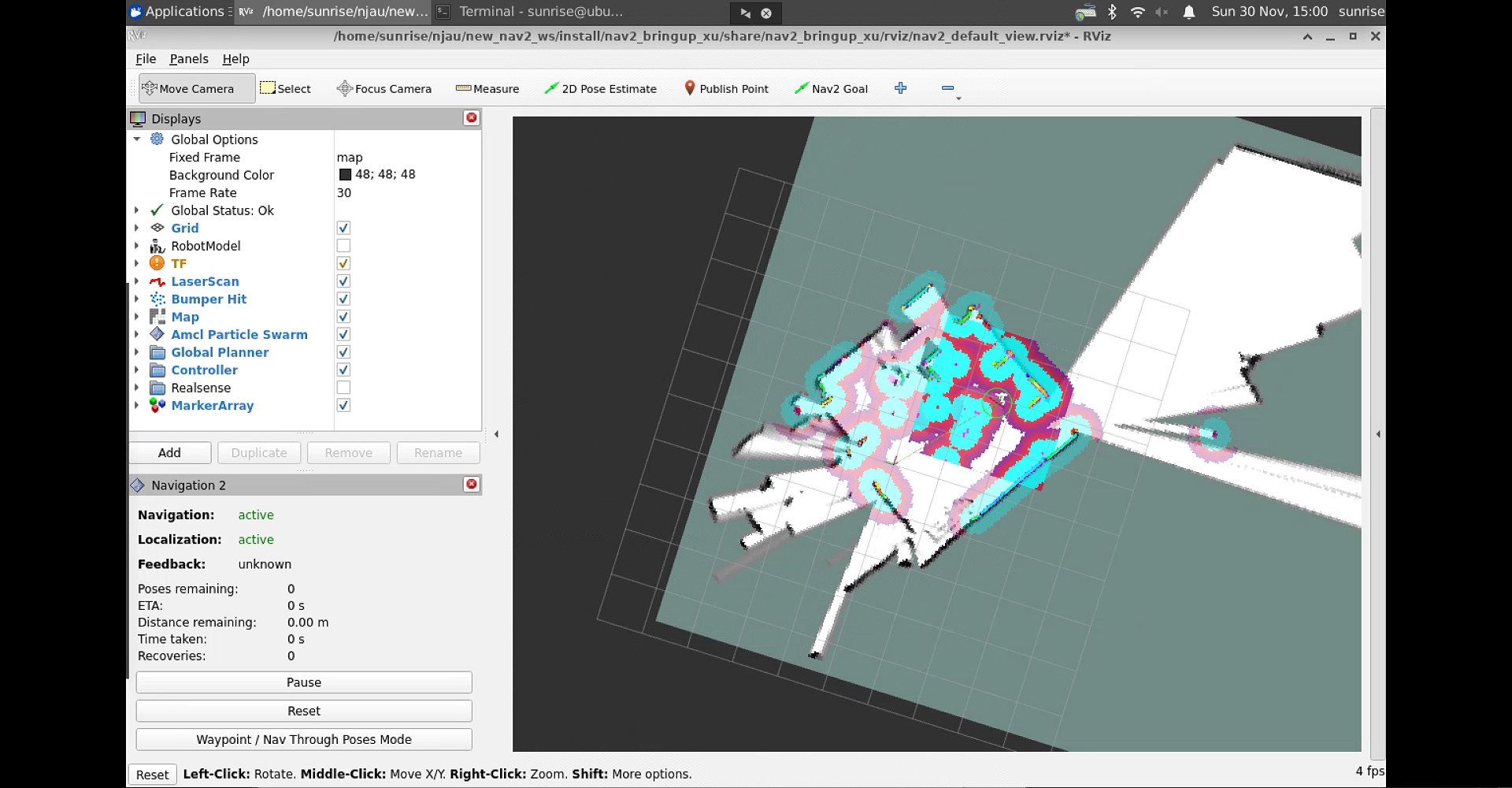
Cartographer纯定位效果
实验中发现:如果需要快速获取准确初始定位,需要对机器人进行移动;但是如果环境点云特征较为明显,等待3-4分钟,不需要移动机器人,算法也可以自动校正初始位置
pbstream 地图保存
参考文章:ros2-humble 使用cartographer建图并保存为pbstream格式
C++代码(保存pbstream 地图)
cpp
bool save_pbstream_map(const std::string& map_name, std::string& message) {
if (!mapping_running_) {
message = "建图未在运行,无法保存地图";
return false;
}
std::string map_path = map_directory_ + "/" + map_name + ".pbstream";
RCLCPP_INFO(get_logger(), "正在保存pbstream地图: %s", map_path.c_str());
// 方法1:尝试使用简单的system命令
std::string command1 = "timeout 120 ros2 service call /write_state cartographer_ros_msgs/srv/WriteState "
"\"{filename: '" + map_path + "', include_unfinished_submaps: false}\"";
RCLCPP_INFO(get_logger(), "尝试方法1: ROS服务调用");
int result1 = system(command1.c_str());
if (result1 == 0) {
if (std::filesystem::exists(map_path)) {
message = "pbstream地图保存成功(方法1)";
return true;
}
}
// 方法1失败,尝试方法2:使用Cartographer命令行工具
RCLCPP_WARN(get_logger(), "方法1失败,尝试方法2");
std::string command2 = "timeout 120 ros2 run cartographer_ros cartographer_pbstream_map_writer -f " + map_path;
int result2 = system(command2.c_str());
if (result2 == 0) {
if (std::filesystem::exists(map_path)) {
message = "pbstream地图保存成功(方法2)";
return true;
}
}
// 所有方法都失败
message = "所有保存方法都失败,请检查Cartographer是否正常运行";
RCLCPP_ERROR(get_logger(), "地图保存失败,方法1返回码: %d, 方法2返回码: %d", result1, result2);
return false;
}launch 启动文件
主要三个节点: nav2_bringup_node 、cartographer_node、cartographer_occupancy_grid_node
设置use_amcl=false,启动需要带use_sim_time:=false
特别注意artographer_node、cartographer_occupancy_grid_node的参数配置,这是必备的
python
cartographer_node = Node(
package='cartographer_ros',
executable='cartographer_node',
name='cartographer_node',
output='screen',
parameters=[{'use_sim_time': use_sim_time,
'use_amcl': use_amcl}],
arguments=['-configuration_directory', configuration_directory,
'-configuration_basename', configuration_basename,
'-load_state_filename', pbstream_path],
)
cartographer_occupancy_grid_node = Node(
package='cartographer_ros',
executable='cartographer_occupancy_grid_node',
name='cartographer_occupancy_grid_node',
output='screen',
parameters=[{'use_sim_time': use_sim_time,
'use_amcl': use_amcl}],
arguments=['-resolution', resolution,
'-publish_period_sec', publish_period_sec],
)autopatrol_cartographer.launch.py
python
import os
import launch
import launch_ros
from launch import LaunchDescription
from launch.substitutions import LaunchConfiguration
from launch_ros.actions import Node
from launch_ros.substitutions import FindPackageShare
from ament_index_python.packages import get_package_share_directory
from launch.launch_description_sources import PythonLaunchDescriptionSource
from launch_ros.actions import Node
from launch.actions import DeclareLaunchArgument, IncludeLaunchDescription, TimerAction
def generate_launch_description():
# 获取与拼接默认路径
autopatrol_robot_dir = get_package_share_directory('autopatrol_robot')
nav2_bringup_dir = get_package_share_directory('nav2_bringup_xu')
rviz_config_dir = os.path.join( nav2_bringup_dir, 'rviz', 'nav2_default_view.rviz')
lidar_dir = get_package_share_directory('bluesea2')
lidar_launch_dir = os.path.join(lidar_dir, 'launch')
patrol_config_path = os.path.join( autopatrol_robot_dir, 'config', 'patrol_config.yaml')
# 配置文件夹路径
pkg_share = FindPackageShare(package='fishbot_cartographer').find('fishbot_cartographer')
configuration_directory = LaunchConfiguration('configuration_directory',
default= os.path.join(pkg_share, 'config') )
# 配置文件
configuration_basename = LaunchConfiguration('configuration_basename', default='pure_locate.lua')
# 地图的分辨率
resolution = LaunchConfiguration('resolution', default='0.05')
# 地图的发布周期
publish_period_sec = LaunchConfiguration('publish_period_sec', default='2.0')###10
# 创建 Launch 配置
use_sim_time = launch.substitutions.LaunchConfiguration('use_sim_time', default='false')
use_amcl = LaunchConfiguration('use_amcl', default='false')#
pbstream_path = LaunchConfiguration(
'load_state_filename',
default='/home/sunrise/njau/maps/vision.pbstream' # ← 你根据实际位置修改
)
nav2_param_path = launch.substitutions.LaunchConfiguration(
'params_file', default=os.path.join(autopatrol_robot_dir, 'config', 'nav2_params_carto.yaml'))
# 声明新的 Launch 参数
use_time_de = DeclareLaunchArgument('use_sim_time', default_value=use_sim_time,
description='Use simulation (Gazebo) clock if true')
pbstream_map_de = DeclareLaunchArgument('load_state_filename', default_value=pbstream_path)
params_de = DeclareLaunchArgument('params_file', default_value=nav2_param_path,
description='Full path to param file to load')
# lidar_node = IncludeLaunchDescription(
# PythonLaunchDescriptionSource(os.path.join(lidar_launch_dir, 'uart_lidar.launch')),
# )
nav2_bringup_node = IncludeLaunchDescription(
PythonLaunchDescriptionSource(
[nav2_bringup_dir, '/launch', '/bringup_launch.py']),
# 使用 Launch 参数替换原有参数
launch_arguments={
'map': '',
'use_sim_time': use_sim_time,
'params_file': nav2_param_path}.items(),
)
# print( f"\n ============== map_yaml_path: {map_dir} ====================\n\n")
cartographer_node = Node(
package='cartographer_ros',
executable='cartographer_node',
name='cartographer_node',
output='screen',
parameters=[{'use_sim_time': use_sim_time,
'use_amcl': use_amcl}],
arguments=['-configuration_directory', configuration_directory,
'-configuration_basename', configuration_basename,
'-load_state_filename', pbstream_path],
)
cartographer_occupancy_grid_node = Node(
package='cartographer_ros',
executable='cartographer_occupancy_grid_node',
name='cartographer_occupancy_grid_node',
output='screen',
parameters=[{'use_sim_time': use_sim_time,
'use_amcl': use_amcl}],
arguments=['-resolution', resolution,
'-publish_period_sec', publish_period_sec],
)
nav2_rviz2_node = Node(
package='rviz2',
executable='rviz2',
name='rviz2',
arguments=['-d', rviz_config_dir],
parameters=[{'use_sim_time': use_sim_time}],
output='screen')
action_node_turtle_control = Node(
package='autopatrol_robot',
executable='patrol_node',
# parameters=[patrol_config_path]
)
# action_node_patrol_client = launch_ros.actions.Node(
# package='autopatrol_robot',
# executable='speaker',
# )
return launch.LaunchDescription([
use_time_de,
pbstream_map_de,
params_de,
# lidar_node,
# mipi_cam_node,
nav2_bringup_node,
cartographer_node,
cartographer_occupancy_grid_node,
nav2_rviz2_node,
# action_node_turtle_control,
# action_node_patrol_client,
])nav2 导航配置
启动文件是 bringup.launch.py
同时注意修改nav2配置文件 params_filed 对应的 yaml 文件中 robot_base_frame 和 frame_id 等,保证 tf 合理
cartographer 纯定位配置
激光雷达 直接链接 地图
pure_locate.lua(核心配置文件)
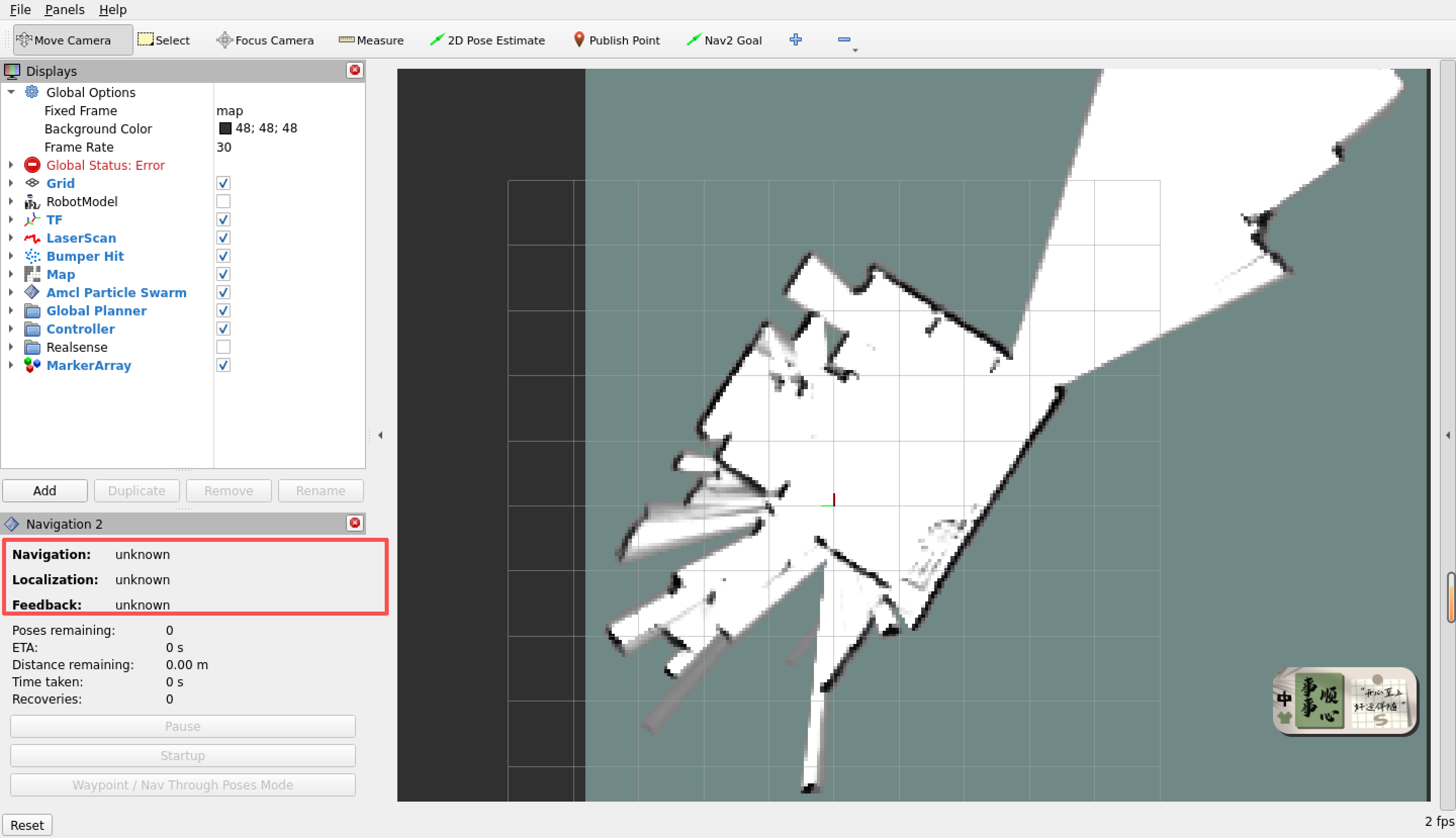
我遇到的问题是地图虽然在rviz2上显示了地图,但是 地图map 无法与 激光雷达frame_id 连接,nav2也失败,膨胀地图和激光点云数据都无法显示,原因是.lua配置文件缺少 TRAJECTORY_BUILDER_2D.min_range = 0.15 等配置。这里提供的 pure_locate.lua 已经测试过可根据要求使用。
lua
include "map_builder.lua"
include "trajectory_builder.lua"
options = {
map_builder = MAP_BUILDER,
trajectory_builder = TRAJECTORY_BUILDER,
-- 帧配置
map_frame = "map",
tracking_frame = "base_scan",
published_frame = "base_scan",
odom_frame = "odom",
provide_odom_frame = false, --true,
-- 传感器配置
use_odometry = false,
use_nav_sat = false,
use_landmarks = false,
num_laser_scans = 1,
num_multi_echo_laser_scans = 0,
num_subdivisions_per_laser_scan = 1,
num_point_clouds = 0,
publish_frame_projected_to_2d = true,
-- 必要参数配置
lookup_transform_timeout_sec = 0.2,
submap_publish_period_sec = 0.3,
pose_publish_period_sec = 5e-3,
trajectory_publish_period_sec = 30e-3,
rangefinder_sampling_ratio = 1.,
odometry_sampling_ratio = 1.,
fixed_frame_pose_sampling_ratio = 1.,
imu_sampling_ratio = 1.,
landmarks_sampling_ratio = 1.,
}
-- 配置轨迹构建器为 2D
MAP_BUILDER.use_trajectory_builder_2d = true
TRAJECTORY_BUILDER_2D.submaps.num_range_data = 50
-- 0改成0.10,比机器人半径小的都忽略
TRAJECTORY_BUILDER_2D.min_range = 0.15
-- 30改成3.5,限制在雷达最大扫描范围内,越小一般越精确些
TRAJECTORY_BUILDER_2D.max_range = 16.0
-- 5改成3,传感器数据超出有效范围最大值
TRAJECTORY_BUILDER_2D.missing_data_ray_length = 10.0
-- true改成false,不使用IMU数据,大家可以开启,然后对比下效果
TRAJECTORY_BUILDER_2D.use_imu_data = false
-- false改成true,使用实时回环检测来进行前端的扫描匹配
TRAJECTORY_BUILDER_2D.use_online_correlative_scan_matching = true
-- 1.0改成0.1,提高对运动的敏感度
TRAJECTORY_BUILDER_2D.motion_filter.max_angle_radians = math.rad(0.1)
-- 0.55改成0.65,Fast csm的最低分数,高于此分数才进行优化。
POSE_GRAPH.constraint_builder.min_score = 0.65
--0.6改成0.7,全局定位最小分数,低于此分数则认为目前全局定位不准确
POSE_GRAPH.constraint_builder.global_localization_min_score = 0.7
TRAJECTORY_BUILDER.pure_localization_trimmer = {
max_submaps_to_keep = 3,
}
POSE_GRAPH.optimize_every_n_nodes = 20
return options