考虑到宇树自身带了一块ARM开发板,因此导航可以分为两种思路:
-
额外上位机远程部署通过无线发送位姿,主要难点在于通讯频率
-
在 pc2 上直接部署,主要难点在于算法轻量化
这个笔记记一下在本体上部署的一种简单方法
基于项目:元启・鸿图HongTu
测评感觉:非常好的一个基础学习项目,由于本体硬盘带的是 ubuntu20.04 系统,所以适配度蛮好的
由于在 G1 上部署依然有很多 bug,记录一下全流程
目录
[1 环境安装与修改配置](#1 环境安装与修改配置)
[1.1 克隆仓库](#1.1 克隆仓库)
[1.2 安装 Livox SDK2](#1.2 安装 Livox SDK2)
[1.3 更改雷达ip](#1.3 更改雷达ip)
[1.4 更改地图保存路径](#1.4 更改地图保存路径)
[1.5 编译项目](#1.5 编译项目)
[1.5.1 安装相关依赖](#1.5.1 安装相关依赖)
[1.5.2 工作空间编译](#1.5.2 工作空间编译)
[1.5.3 安装依赖包](#1.5.3 安装依赖包)
[2 部署应用](#2 部署应用)
[2.1 建图及保存](#2.1 建图及保存)
[2.2 编辑地图](#2.2 编辑地图)
[2.3 开启导航](#2.3 开启导航)
[2.4 开启运控](#2.4 开启运控)
1 环境安装与修改配置
1.1 克隆仓库
bash
git clone https://github.com/yuanqizhiti/HongTu.git1.2 安装 Livox SDK2
bash
git clone https://github.com/Livox-SDK/Livox-SDK2.git
cd ./Livox-SDK2/
mkdir build
cd build
cmake .. && make -j
sudo make install1.3 更改雷达ip
bash
# 修改本机与雷达ip
cd HongTu/G1Nav2D/src/livox_ros_driver2-master/config/
gedit MID360_config.json修改逻辑和之前笔记记录的一样,主要是 ip 地址:
python
{
"lidar_summary_info" : {
"lidar_type": 8
},
"MID360": {
"lidar_net_info" : {
"cmd_data_port": 56100,
"push_msg_port": 56200,
"point_data_port": 56300,
"imu_data_port": 56400,
"log_data_port": 56500
},
"host_net_info" : {
"cmd_data_ip" : "192.168.123.164",
"cmd_data_port": 56101,
"push_msg_ip": "192.168.123.164",
"push_msg_port": 56201,
"point_data_ip": "192.168.123.164",
"point_data_port": 56301,
"imu_data_ip" : "192.168.123.164",
"imu_data_port": 56401,
"log_data_ip" : "",
"log_data_port": 56501
}
},
"lidar_configs" : [
{
"ip" : "192.168.123.120",
"pcl_data_type" : 1,
"pattern_mode" : 0,
"extrinsic_parameter" : {
"roll": 0.0,
"pitch": 0.0,
"yaw": 0.0,
"x": 0,
"y": 0,
"z": 0
}
}
]
}1.4 更改地图保存路径
bash
# 修改地图保存路径,将该文件下最底部路径改为自己的电脑
cd HongTu/G1Nav2D/src/fastlio2/src/
gedit map_builder_node.cpp
python
// 设置全局指针和保存路径
g_ground_pub_thread = &ground_pub_thread;
g_map_path = "/home/unitree/Codes/HongTu/G1Nav2D/src/fastlio2/PCD/map.pcd";
g_ground_map_path = "/home/unitree/Codes/HongTu/G1Nav2D/src/fastlio2/PCD/ground_map.pcd";
g_keyposes_path = "/home/unitree/Codes/HongTu/G1Nav2D/src/fastlio2/path/key_poses.txt";
map_builder.run();
ground_pub_worker.join();
return 0;1.5 编译项目
1.5.1 安装相关依赖
python3-empy:
bash
sudo apt-get update
sudo apt-get install python3-empytf2_sensor_msgs:
bash
sudo apt-get update
sudo apt-get install ros-noetic-tf2-sensor-msgs装完之后,重新加载下环境(或者开个新终端):
bash
source /opt/ros/noetic/setup.bash(建议加到 ~/.bashrc 里,这样每次开终端就自动 source)
==================================增值税==================================
如果之前没有修正过环境,G1 自带的环境大概率报 404 / GPG 错误,这时候进行ROS 软件源修正:
1️⃣ 删除所有旧的 ROS 软件源
bash
sudo rm /etc/apt/sources.list.d/ros-latest.list 2>/dev/null
sudo rm /etc/apt/sources.list.d/ros2-latest.list 2>/dev/null
# 彻底清理,把 sources.list 里可能残留的 ROS 源也删掉
sudo sed -i '/ros\/ubuntu/d' /etc/apt/sources.list
sudo sed -i '/ros2\/ubuntu/d' /etc/apt/sources.list2️⃣ 删除旧的 ROS GPG Key
ROS 官方之前换过 key,宇树 G1 自带的就是过期的那个,需要删除后重新导入:
bash
sudo apt-key del F42ED6FBAB17C654 2>/dev/null
# 检查一下是否还残留 key(如果为空就没问题):
apt-key list | grep -i ros3️⃣ 重新添加 ROS 官方源
创建源文件:
bash
echo "deb http://packages.ros.org/ros/ubuntu focal main" | sudo tee /etc/apt/sources.list.d/ros-latest.list4️⃣ 重新添加最新 ROS GPG key
bash
sudo apt-get install curl gnupg2 lsb-release -y
# 导入最新密钥
curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -
# 成功时应该输出:OK5️⃣ 更新 apt
python
sudo apt-get update
# ⚠️ 这一步必须不再出现 GPG 错误,否则说明前面没清干净
# 如果看到以下内容那就成功了:
# Get: ... focal InRelease
# Hit: ...
# Reading package lists... Done6️⃣ 再次安装 tf2_sensor_msgs
python
sudo apt-get install ros-noetic-tf2-sensor-msgs==================================增值税==================================
1.5.2 工作空间编译
如果直接编译,会发现多个报错,接下来先逐个解决避免,最后再编译
1️⃣ 如果直接编译,会报错:
bash
fatal error: livox_ros_driver2/CustomMsg.h: No such file or directory这是因为 livox_ros_driver2 的自定义消息 CustomMsg 的头文件没被找到
因此,先单独把 livox_ros_driver2 编译一遍,让它把消息生成出来,然后再编整个工作空间
bash
# 根据自己项目路径修改
cd ~/Codes/HongTu/G1Nav2D
# 确保是 ROS1 环境
source /opt/ros/noetic/setup.bash
# 单独编译 livox_ros_driver2(注意带上 ROS_EDITION=ROS1)
catkin_make -DROS_EDITION=ROS1 --pkg livox_ros_driver2这一步的目标就是生成 CustomMsg.h 等相关文件,编完之后可以确认一下:
bash
ls devel/include/livox_ros_driver2
# 如果里面能看到 CustomMsg.h,就说明这一关 OK 了2️⃣ livox_ros_driver2 的头文件已经有了,但依然会报新的错误:
bash
fatal error: fastlio/SlamReLoc.h: No such file or directory
fatal error: fastlio/SaveMap.h: No such file or directory这说明 fastlio 包里通过 srv 生成的头文件都还没生成
因此,先单独编 fastlio,在工作空间里依次执行:
bash
cd ~/Codes/HongTu/G1Nav2D
source /opt/ros/noetic/setup.bash
catkin_make -DROS_EDITION=ROS1 --pkg fastlio确认头文件已经生成:
bash
cd ~/Codes/HongTu/G1Nav2D
ls devel/include/fastlio
# 应该能看到类似:MapConvert.h SaveMap.h SlamHold.h SlamReLoc.h SlamRelocCheck.h SlamStart.h ...3️⃣ livox_ros_driver2
这个问题其实是最早出现的,但是由于需要解决掉前两个,这个才能没问题,因此按照安装顺序进行了优化
livox_ros_driver2 默认按照 ROS2 的方式在编译(用 ament_cmake_auto),而 G1 的工作空间是 ROS1(Noetic + catkin),所以会报错
livox_ros_driver2 这个仓库本身是"同时兼容 ROS1 和 ROS2"的,它在 CMakeLists.txt 里用一个变量 ROS_EDITION 来区分走 ROS1 还是 ROS2 分支。因此,按照官方 README 的推荐编译方式,在 G1Nav2D 工作空间里,加上 ROS_EDITION 选项:
bash
cd ~/Codes/HongTu/G1Nav2D
# 如果之前安装过,则需要清理然后按照全部的流程安装一遍
# 如果是按照正确流程,先编译了头文件,则不要清理!!!否则需要编译安装头文件
# 1. 清理之前的 build / devel(非常重要,避免旧的 CMake 缓存)
# rm -rf build devel
# 2. 确保当前终端加载的是 ROS1 Noetic
source /opt/ros/noetic/setup.bash
# 3. 重新用字符串形式指定 ROS_EDITION 为 ROS1
catkin_make -DROS_EDITION=ROS1解释一下这一步:
-
-DROS_EDITION=1 相当于手动做了一次 ./build.sh ROS1 里的核心操作
-
这样 CMakeLists.txt 里判断 ROS1 / ROS2 的逻辑就会进 ROS1 分支,不再调用 find_package(ament_cmake_auto ...)
最后显示:
bash
[100%] Built target ros_map_edit
[100%] Built target body2map_pointcloud这一段输出就说明:整个工程已经编译成功了 ✅
没有再出现 Error、undefined reference、Invoking "make ... failed" 之类的字样
→ 说明 catkin_make -DROS_EDITION=ROS1 已经完整通过了,包括之前卡住的 fastlio、livox_ros_driver2、ikd-Tree 那些问题都已经解决
4️⃣ 最后,进行环境设置(每次用前)
在工作空间根目录执行:
bash
cd ~/Codes/HongTu/G1Nav2D
source devel/setup.bash可以把这一行加进 ~/.bashrc,以后开终端自动生效:
bash
echo "source ~/Codes/HongTu/G1Nav2D/devel/setup.bash" >> ~/.bashrc1.5.3 安装依赖包
此处由于项目是 ROS1(Noetic),做了防 bug 优化:
bash
sudo apt update
sudo apt install ros-noetic-teb-local-planner ros-noetic-global-planner ros-noetic-costmap-2d单独安装:
bash
sudo apt-get install ros-noetic-octomap-server此外还可以安装 move_base(常用于 2D 导航):
bash
sudo apt install ros-noetic-move-base2 部署应用
2.1 建图及保存
终端1建图:
bash
# 建图
cd HongTu/G1Nav2D/
source devel/setup.bash
roslaunch fastlio mapping.launch终端2保存:
bash
# 打开新终端
cd HongTu/G1Nav2D/
source devel/setup.bash
# 保存地图,自定义路径及地图名称
rosrun map_server map_saver map:=/projected_map -f /home/nvidia/mymap简单分析一下这个指令:
-
map_server 是 ROS 包名
-
map_saver 是这个包中的可执行文件,用于保存栅格地图(PGM + YAML),运行后会将订阅到的 map 数据写入磁盘
-
map:=/projected_map 是一条 topic 重映射(topic remap),默认 map_saver 会订阅 /map 话题,通过 map:=/projected_map 让它订阅 /projected_map。也就是说:告诉 map_saver:去 /projected_map 获取栅格地图
-
-f /home/nvidia/mymap:-f 表示输出文件(file prefix),不包含扩展名,map_saver 会自动生成:将保存两个文件:/home/nvidia/mymap.pgm 和 /home/nvidia/mymap.yaml,如果路径不存在,会保存失败
-
综上,这条命令的含义:从 /projected_map 话题获取 2D 栅格地图,并保存为 /home/nvidia/mymap.yaml 和 /home/nvidia/mymap.pgm
2.2 编辑地图
bash
# 打开地图,利用Map Eraser Tool修改地图,ctrl+加号或减号可修改画笔大小,保存地图
source devel/setup.bash
roslaunch ros_map_edit map_edit.launch也可以使用 GIMP 编辑:
bash
gimp ~/Desktop/Codes/SLAM/g1_map/mymap.pgm此处简单记录几个小技巧:
- 墙体可通过画笔/铅笔绘制,Shift 自动画直线
- 油漆桶填充工具 -> 改变前景色/背景色 -> 滴管取色 -> 矩形选择工具选择后可以大范围变色
- 矩形选择工具选择后 delete 变为可行区域
- 不能导出 PNG/JPG!必须导出 PGM!文件 → 导出为...(Export As),文件类型请选择:*.pgm,弹出 PGM 参数设置:保持默认(ASCII/RAW 都可以),不要修改分辨率、DPI
- 最麻烦的是裁剪,裁剪完需要对应修改 map.yaml,根据裁剪的像素进行修改,为了简化流程写了个脚本自动编写 yaml,基本原理就是 OpenCV 的模板匹配方法,因此要先处理完保存,再裁剪输出 yaml
github(以后各脚本更新升级都会放在此项目中):https://github.com/YemuRiven/unitree-g1-scripts/tree/main/SLAM/ros-map-tools
python
python auto_update_map_yaml.py \
dataset/orig_map.yaml \
dataset/orig_map.pgm \
dataset/cropped_map.pgm \
dataset/new_map.yaml2.3 开启导航
修改地图路径(源项目中位置写错了):
bash
cd HongTu/G1Nav2D/src/fastlio2/launch/
# 可以 ls 看一下文件
# unitree@ubuntu:~/Codes/HongTu/G1Nav2D/src/fastlio2/launch$ ls
# gridmap_load.launch mapping.launch navigation.launch octomap_server.launch
gedit gridmap_load.launch修改为自己的地图路径:
python
<!-- 设置地图的配置文件 -->
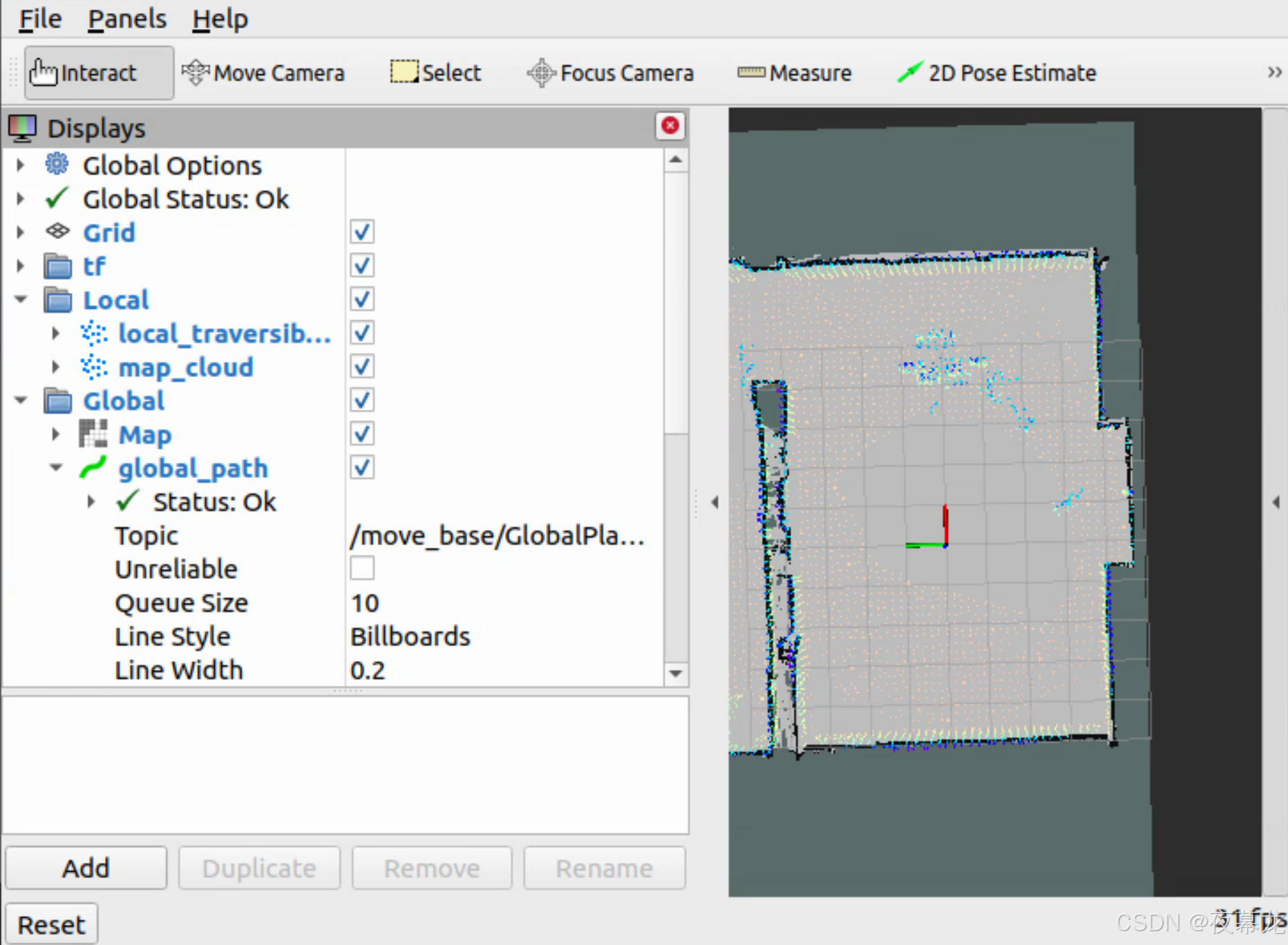
<arg name="2dmap_file" default="/home/unitree/Codes/HongTu/map/mymap.yaml" />终端1启动导航:
bash
# 启动导航,启动导航后需自行按照雷达位置重定位
cd HongTu/G1Nav2D/
source devel/setup.bash
roslaunch fastlio navigation.launch2.4 开启运控
安装 unitree_sdk2_python 参考宇树官方文档
或者之前的笔记:G1部署(八)
终端2 G1 控制(此处新建了环境 unitree_sdk2py):
python
# 打开新终端,网口可通过ifconfig命令查询自行更改
cd HongTu/unitree_sdk2_python/example/g1/high_level/
python3 g1_control.py eth0在 rviz 中发布目标点即可自主导航: