
🏠 个人主页: EXtreme35
📚 个人专栏:
| 专栏名称 | 专栏主题简述 |
|---|---|
| 《C语言》 | C语言基础、语法解析与实战应用 |
| 《数据结构》 | 线性表、树、图等核心数据结构详解 |
| 《题解思维》 | 算法思路、解题技巧与高效编程实践 |

目录
- 第一部分:判断链表是否有环
-
- [1. 问题描述](#1. 问题描述)
- [2. 核心思路:快慢指针法](#2. 核心思路:快慢指针法)
- [3. 数学证明(重点)](#3. 数学证明(重点))
-
- [Q1: 为什么快指针走2步,慢指针走1步,两者一定会相遇?](#Q1: 为什么快指针走2步,慢指针走1步,两者一定会相遇?)
- [Q2: 如果不按照当前设定走呢?还能保证相遇吗?](#Q2: 如果不按照当前设定走呢?还能保证相遇吗?)
- 第二部分:寻找环的入口
-
- [1. 问题描述](#1. 问题描述)
- [2. 核心思路:双指针二次相遇](#2. 核心思路:双指针二次相遇)
- [3. 数学推导(图解逻辑)](#3. 数学推导(图解逻辑))
- 第三部分:复杂度
在链表数据结构中,"环"是一个经典且考察频率极高的话题。这类问题通常分为两个阶段:
- 判断是否有环 (LeetCode 141. 环形链表)。
- 如果有环,找出环的入口 (LeetCode 142. 环形链表 II)。
第一部分:判断链表是否有环
1. 问题描述
给你一个链表的头节点 head ,判断链表中是否有环。
如果链表中有某个节点,可以通过连续跟踪 next 指针再次到达,则链表中存在环。 为了表示给定链表中的环,评测系统内部使用整数 pos 来表示链表尾连接到链表中的位置(索引从 0 开始)。注意:pos 不作为参数进行传递 。仅仅是为了标识链表的实际情况。
如果链表中存在环 ,则返回 true 。 否则,返回 false 。

2. 核心思路:快慢指针法
我们定义两个指针:
- 慢指针 (
slow):一次走 1 步。 - 快指针 (
fast):一次走 2 步。
算法流程:
- 初始化
slow和fast都指向头节点head。 - 只要
fast和fast->next不为空,循环执行:slow前进 1 步。fast前进 2 步。- 如果
fast == slow,说明相遇,链表存在环。
- 如果循环结束(
fast遇到 NULL),说明无环。
代码实现 (C语言)
c
/**
* Definition for singly-linked list.
* struct ListNode {
* int val;
* struct ListNode *next;
* };
*/
bool hasCycle(struct ListNode *head)
{
if (head == NULL || head->next == NULL)
return false;
//快慢指针
struct ListNode *slow = head;
struct ListNode *fast = head;
while (fast != NULL && fast->next != NULL)
{
slow = slow->next; // 慢走1步
fast = fast->next->next; // 快走2步
if (slow == fast)
return true; // 相遇,有环
}
return false; // 走到尽头,无环
}3. 数学证明(重点)
Q1: 为什么快指针走2步,慢指针走1步,两者一定会相遇?
证明(相对速度法):
我们假设在慢指针刚刚进入环 的那一时刻,快指针开始追,这时候不知道快指针已经走多少圈了,就假设在此时我图中标记的位置。
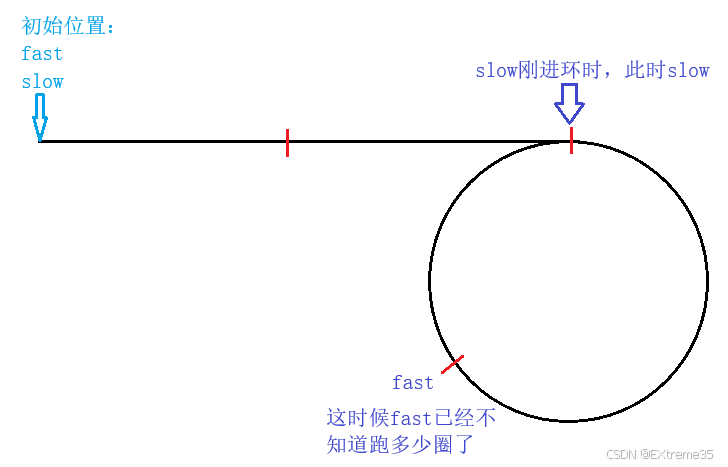
下来我们为了证明是否一定能追上,定义几个距离,看看最后是否能推出一个数学表达式。
- 假设从初始位置到刚进入环的距离是
L。 - 假设
slow进入环时,fast追上slow的距离为 N N N(沿链表运行方向)。 - 假设链表环长度为
C。
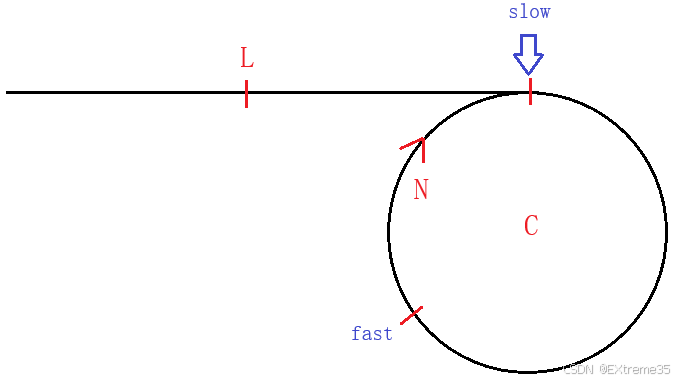
现在fast速度是slow的两倍,也就是每次多走1 ,也就是在N这个距离中,每次距离会少1 ,直至为0,一定会追上。
N → N − 1 → N − 2 → . . . → 1 → 0 N \rightarrow N-1 \rightarrow N-2 \rightarrow ... \rightarrow 1 \rightarrow 0 N→N−1→N−2→...→1→0
证明总结:
- 当
slow进入环之后,fast已经在环内了。 - 假设
slow进入环时,fast领先slow的距离为 N N N(沿链表运行方向)。 - 我们将
slow看作静止,那么fast相对于slow的移动速度是 2 − 1 = 1 2 - 1 = 1 2−1=1 步/次。 - 每一次迭代,
fast都会把它和slow之间的距离缩短 1。 - 距离变化过程: N , N − 1 , N − 2 , . . . , 1 , 0 N, N-1, N-2, ..., 1, 0 N,N−1,N−2,...,1,0。
结论:因为距离每次减 1,必然会减到 0(相遇),绝对不会跳过去。
Q2: 如果不按照当前设定走呢?还能保证相遇吗?
这是一个非常好的进阶面试题。
分析:
- 在刚才的分析中,我们是找到了相对速度,每次会少一步。
- 如果快指针走 3 步,慢指针走 1 步,相对速度 是 3 − 1 = 2 3 - 1 = 2 3−1=2。
- 如果快指针走 4 步,慢指针走 1 步,相对速度 是 4 − 1 = 3 4 - 1 = 3 4−1=3。
- 这意味着
fast每次把距离缩短一个相对速度的距离。 - 还是按照上面的假设进行推演,得到每次相距的距离。
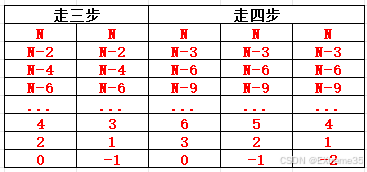
这里为什么有这么多情况呢?因为不知道N到底有多大,它有可能是奇数、偶数、0,都有可能。
所以需要对每一个结果进行讨论,当最后距离为0的时候,显然已经追上了,那么-1代表什么意思呢?很显然,代表这时候已经进入下一轮追击了,且快指针就在慢指针前面一个位置。那个-2也是一样的道理。
那我们之前设的圆环长度还一直没用呢,这时候就派上用场了。-1、-2,那这时候相对距离就是C-1、C-2。
走三步的情况下:
- N为偶数,第一轮追上。
- N为奇数,第一轮错过,看环长度。
- C − 1 C-1 C−1 为奇数,那么永远追不上。
- C − 1 C-1 C−1为偶数,那么下一轮就追上了。
走四步的情况:
走四步就不能看奇偶了,而是是不是三的倍数,因为每次距离会少三,所以三的倍数一定会追上。
N % 3 = 0,首轮就追上。N % 3 = 1,首轮错过,看环长。(C-1) % 3 = 0,下一轮追上。(C-1) % 3 = 1,永远追不上。(C-1) % 3 = 2,看下述情况。
N % 3 = 2`,首轮错过,看环长。(C-1) % 3 = 0,下一轮追上。(C-1) % 3 = 1,看上述情况。(C-1) % 3 = 2,永远追不上。
那么有没有一个稍微通用的结论呢?尝试一下
- 设慢指针
slow进环时,快指针fast与slow的距离为 N - 设
slow进环前走的距离为:L fast在slow进环前已经绕环转了 x 圈
距离关系分析
fast走的总距离为:L + x*C + (C - N)。slow走的距离为: L。
这时候就算是有个半成品的等式了,现在只需要带入速度关系就可,以3倍为例:
- 3L = L + (x+1)*C - N
- 化简后:2L = (x+1)*C - N,这时候就可以用奇偶关系判断了。
关键分析: 如果同时存在以下两个条件:N 是奇数 、C 是偶数。
那么根据公式: 偶数 = (x+1)*偶数 - 奇数
逻辑矛盾推导
(x+1)*偶数的结果一定是偶数- 只有 奇数 - 奇数 = 偶数 才成立
- 但等式中是 偶数 - 奇数,这在整数范围内不可能成立,故一定追不上。
结论: 如果步同时存在 N 是奇数 且 C 是偶数 的情况,永远追不上的条件不成立,因此快慢指针一定能相遇。
相遇情况总结
- 当 N 是偶数:第一轮追击就能相遇
- 当 N 是奇数 、C 是偶数,一定追不上。
- 其他情况都会在后面几轮追上。
第二部分:寻找环的入口
1. 问题描述
给定一个链表的头节点 head ,返回链表开始入环的第一个节点。 如果链表无环,则返回 null。
如果链表中有某个节点,可以通过连续跟踪 next 指针再次到达,则链表中存在环。 为了表示给定链表中的环,评测系统内部使用整数 pos 来表示链表尾连接到链表中的位置(索引从 0 开始 )。如果 pos 是 -1,则在该链表中没有环。注意:pos 不作为参数进行传递 ,仅仅是为了标识链表的实际情况。
不允许修改 链表。
2. 核心思路:双指针二次相遇
- 第一次相遇:使用快慢指针判断是否有环,若有环,记录相遇点。
- 寻找入口 :
- 让一个指针从 头节点 (Head) 出发。
- 让另一个指针从 相遇点 (Meeting Node) 出发。
- 两个指针都每次走 1 步。
- 它们最终会在 环入口 (Entry Node) 相遇。
代码实现 (C语言)
c
struct ListNode *detectCycle(struct ListNode *head)
{
struct ListNode *slow = head;
struct ListNode *fast = head;
// 步骤一:判断是否有环
while (fast != NULL && fast->next != NULL) {
slow = slow->next;
fast = fast->next->next;
if (slow == fast)
{
// 步骤二:发现环,寻找入口
// 1. 定义两个指针,index1在头,index2在相遇点
struct ListNode *index1 = head;
struct ListNode *index2 = slow;
// 2. 两人每次都走一步,直到相遇
while (index1 != index2)
{
index1 = index1->next;
index2 = index2->next;
}
// 3. 相遇点即为环入口
return index1;
}
}
return NULL;
}3. 数学推导(图解逻辑)
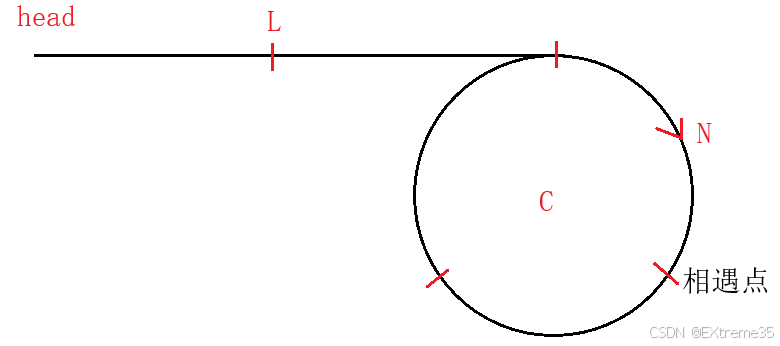
设:
- L L L = 头节点到环入口的距离。
- C C C = 环的长度。
- N N N = 环入口到相遇点的距离(沿运行方向)。
- 相遇时,慢指针在环内走了 N N N 的距离。
推导过程:
-
慢指针
slow走的距离 : S s l o w = L + N S_{slow} = L + N Sslow=L+N
(注意:通常慢指针在入环第一圈内就会被追上) -
快指针
fast走的距离 : S f a s t = L + N + n C S_{fast} = L + N + nC Sfast=L+N+nC
( n n n 是快指针在环内绕的圈数,且 n ≥ 1 n \ge 1 n≥1) -
速度关系 :快指针速度是慢指针的 2 倍。
2 × ( L + N ) = L + N + n C 2 \times (L + N) = L + N + nC 2×(L+N)=L+N+nC -
化简公式 :
2 L + 2 N = L + N + n C 2L + 2N = L + N + nC 2L+2N=L+N+nC
L + N = n C L + N = nC L+N=nC
L = n C − N L = nC - N L=nC−N -
关键变换 :
为了直观理解,我们将 n C nC nC 拆解为 ( n − 1 ) C + C (n-1)C + C (n−1)C+C:
L = ( n − 1 ) C + ( C − N ) L = (n-1)C + (C - N) L=(n−1)C+(C−N)
公式含义解析:
- L L L 是从头走到入口的距离。
- ( C − N ) (C - N) (C−N) 恰好是从相遇点继续往前走,回到环入口的距离。
- ( n − 1 ) C (n-1)C (n−1)C 表示在环里转了 n − 1 n-1 n−1 圈(这对最终位置没有影响)。
结论 :从头节点出发走 L L L 步,和从相遇点出发走 L L L 步(实际上是转几圈后走了 C − N C-N C−N),会同时到达环入口。
第三部分:复杂度
- 时间复杂度 : O ( N ) O(N) O(N)。
- 判断有环时,快慢指针在环内移动次数不会超过环的长度,总步数与节点数 N N N 线性相关。
- 寻找入口时,同样是线性遍历。
- 空间复杂度 : O ( 1 ) O(1) O(1)。
- 只使用了
slow,fast等几个指针变量,没有使用额外的数据结构。
- 只使用了
