🔥作者简介: 一个平凡而乐于分享的小比特,中南民族大学通信工程专业研究生,研究方向无线联邦学习
🎬擅长领域:驱动开发,嵌入式软件开发,BSP开发
❄️作者主页:一个平凡而乐于分享的小比特的个人主页
✨收录专栏:通信协议,本专栏为记录项目中用到的知识点,以及一些硬件常识总结
欢迎大家点赞 👍 收藏 ⭐ 加关注哦!💖💖
I2C、SPI、CAN、串口通信详细对比
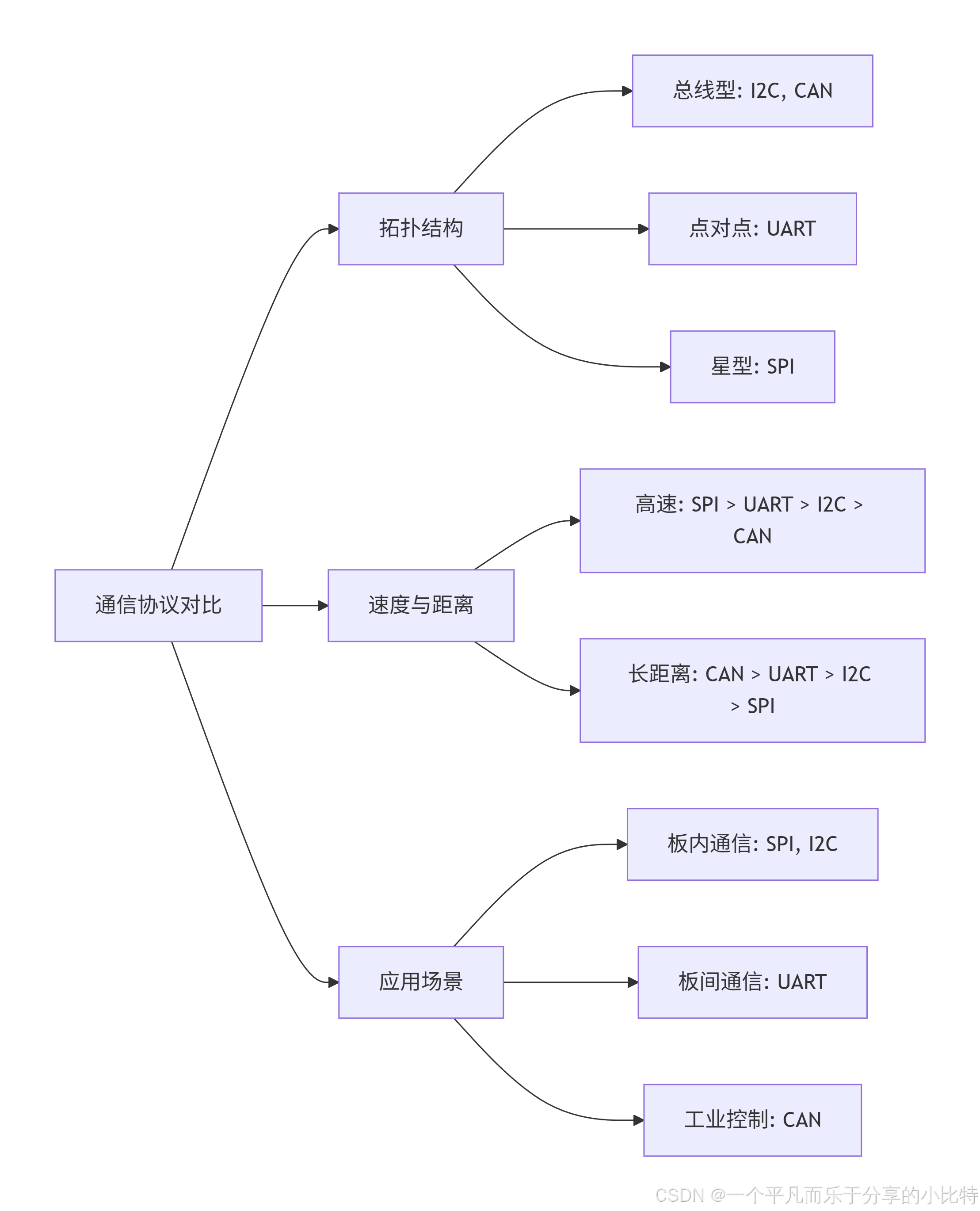
一、核心特性对比图
二、详细对比表格
| 特性 | I2C | SPI | CAN | 串口(UART) |
|---|---|---|---|---|
| 通信方式 | 半双工,串行 | 全双工,串行 | 半双工,串行 | 全双工,串行 |
| 线路数量 | 2线(SCL+SDA) | 3-4线(MOSI+MISO+SCLK+CS) | 2线(CAN_H+CAN_L) | 2-3线(TX+RX+GND) |
| 拓扑结构 | 多主多从,总线型 | 一主多从,星型 | 多主多从,总线型 | 点对点 |
| 最大设备数 | 理论127(7位地址-全0广播地址) | 通过CS引脚扩展 | 理论上110个节点 | 点对点,无限制 |
| 通信速度 | 100kbps-5Mbps | 可达50Mbps+ | 10kbps-1Mbps | 300bps-3Mbps+ |
| 通信距离 | 板级,<1米 | 板级,<0.5米 | 可达1000米 | 可达15米 |
| 错误检测 | CRC校验(部分) | 无 | CRC校验+应答 | 奇偶校验(可选) |
| 冲突处理 | 仲裁机制 | 无(主控) | 非破坏性仲裁 | 无 |
| 同步方式 | 同步(有时钟) | 同步(有时钟) | 异步(无时钟) | 异步(无时钟) |
| 典型应用 | 传感器、EEPROM | 存储器、显示屏 | 汽车、工业控制 | 调试、设备互联 |
| 硬件复杂度 | 低 | 中 | 高 | 低 |
| 成本 | 低 | 中 | 高 | 低 |
三、场景化理解
场景1:家庭派对比喻
- I2C:像是一个小型讨论会,主持人(主设备)点名提问,其他人(从设备)轮流回答
- SPI:像是老师讲课,老师(主设备)一直说话,学生(从设备)可以同时做笔记
- CAN:像是辩论赛,谁想发言都可以,但有规则避免同时说话
- UART:像是两个人打电话,双方都可以说话,但要轮流说清楚
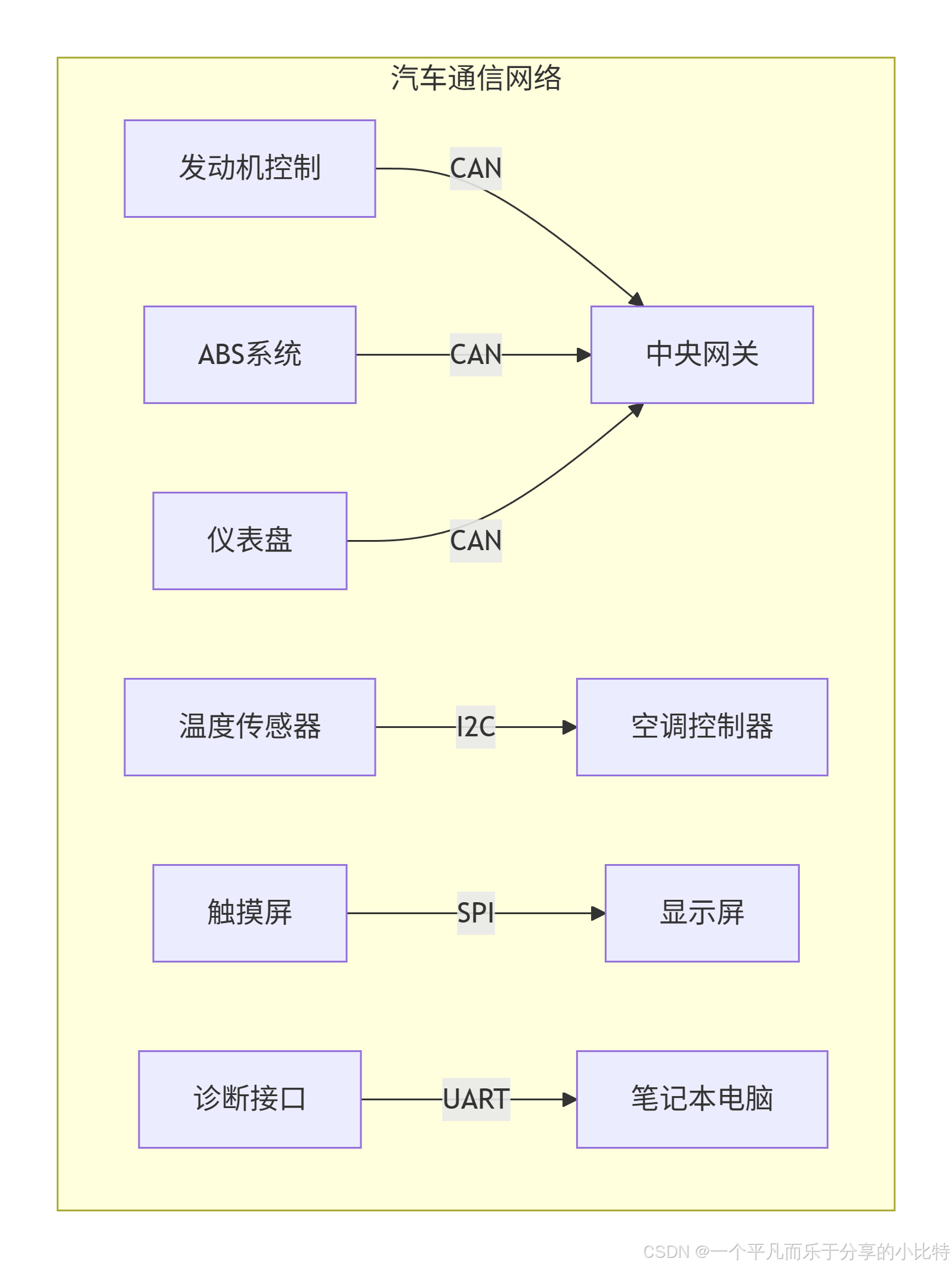
场景2:汽车电子系统
四、选择指南
何时选择哪种协议?
- 选择I2C当 :
- 需要连接多个低速设备(传感器、IO扩展)
- 引脚数量受限
- 通信距离短(同一电路板)
- 示例:连接温度传感器、实时时钟、EEPROM
- 选择SPI当 :
- 需要高速数据传输
- 连接少量设备(通常<10)
- 需要全双工通信
- 示例:SD卡、TFT显示屏、FLASH存储器
- 选择CAN当 :
- 工业环境或汽车应用
- 需要长距离可靠通信
- 网络中有多个主设备
- 示例:汽车ECU通信、工业自动化
- 选择UART当 :
- 简单的点对点通信
- 调试和日志输出
- 设备间简单数据交换
- 示例:GPS模块、蓝牙模块、调试控制台
五、实战示例对比
假设我们要设计一个智能家居控制器:
智能家居系统:
1. 读取5个温度传感器 → 选择I2C(设备多、速度要求低)
2. 驱动高分辨率OLED屏幕 → 选择SPI(高速、数据量大)
3. 与楼宇控制系统通信 → 选择CAN(距离远、抗干扰)
4. 连接调试电脑 → 选择UART(简单、通用)六、关键差异总结
| 对比维度 | 胜出者 | 原因 |
|---|---|---|
| 速度 | SPI | 时钟直连,无地址开销 |
| 设备数量 | I2C/CAN | 总线结构,地址寻址 |
| 距离 | CAN | 差分信号,抗干扰强 |
| 简单性 | UART | 最少线路,无时钟 |
| 可靠性 | CAN | 完善的错误检测和处理 |
| 成本 | I2C/UART | 硬件简单,引脚少 |
七、常见误区澄清
- "SPI比I2C快" → 大多数情况下正确,但高速I2C也可达5Mbps
- "UART只能点对点" → 可通过RS485扩展为多设备网络
- "CAN很复杂" → 硬件复杂,但软件API通常很友好
- "I2C需要上拉电阻" → 正确,这是必须的硬件要求
八、趋势与发展
- I2C:向更高速度发展(I3C协议)
- SPI:Quad/Octal SPI提升存储接口速度
- CAN:CAN FD提供更高带宽
- UART:被USB替代,但在嵌入式领域仍不可替代
每种协议都有其"甜蜜点",正确选择的关键是理解项目需求:距离、速度、设备数量、可靠性和成本。在实际项目中,经常需要组合使用多种协议以达到最佳效果。