3D尺度不变特征变换(SIFT3D):医学影像关键点检测的核心算法与实现
简介
医学影像(如CT、MRI)多为三维数据,传统2D SIFT算法无法直接处理。SIFT3D(3D Scale-Invariant Feature Transform)作为2D SIFT的三维扩展,通过尺度空间极值检测、关键点定位、方向分配、描述符构建 四大步骤,实现三维数据的鲁棒关键点提取,广泛应用于医学影像匹配、三维重建与病灶识别。本文将拆解SIFT3D的核心原理,对比其与Harris3D/Harris6D的优势,并提供Python实现示例。
一、SIFT3D算子:从2D到3D的特征迁移
SIFT3D的理论完全继承自2D SIFT,但针对三维空间做了适配------将"图像金字塔"扩展为"体积金字塔",将"2D梯度"扩展为"3D梯度" ,核心目标仍是找到尺度不变、旋转不变的关键点。
1. 尺度空间极值检测:在"多分辨率体积"中找突出点
尺度空间通过高斯金字塔 构建:对三维影像逐层施加不同方差的高斯模糊(σ逐渐增大),形成"多分辨率"的体积金字塔。然后计算相邻层的高斯差分(DoG, Difference of Gaussians) ,得到DoG体积:
D o G ( x , y , z , σ ) = G ( x , y , z , k σ ) − G ( x , y , z , σ ) DoG(x,y,z,\sigma) = G(x,y,z,k\sigma) - G(x,y,z,\sigma) DoG(x,y,z,σ)=G(x,y,z,kσ)−G(x,y,z,σ)
其中 G G G是3D高斯函数, k k k是尺度因子。
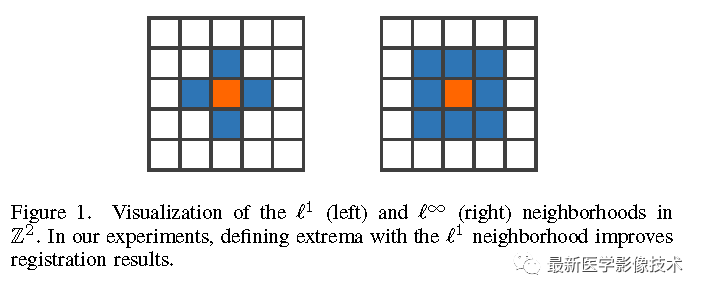
接下来在3D空间+尺度 的联合域中搜索局部极值:对每个体素,比较其在当前DoG层的26邻域(3D空间的8个顶点+前后层的对应位置)的值,若为极大或极小值,则标记为候选关键点。
2. 关键点定位:过滤噪声,精准定位
候选关键点需通过对比度筛选和**结构张量(Structure Tensor)**优化:
-
对比度筛选:计算所有候选点的DoG值,去除小于"最大DoG值×比例阈值(如0.03)"的点,过滤低对比度噪声。
-
结构张量优化 :结构张量 M M M描述局部区域的梯度分布,用于判断关键点的"稳定性":
M = ∑ w I x 2 ∑ w I x I y ∑ w I x I z ∑ w I y I x ∑ w I y 2 ∑ w I y I z ∑ w I z I x ∑ w I z I y ∑ w I z 2 M = \begin{bmatrix} \sum wI_x^2 & \sum wI_xI_y & \sum wI_xI_z \\ \sum wI_yI_x & \sum wI_y^2 & \sum wI_yI_z \\ \sum wI_zI_x & \sum wI_zI_y & \sum wI_z^2 \end{bmatrix} M= ∑wIx2∑wIyIx∑wIzIx∑wIxIy∑wIy2∑wIzIy∑wIxIz∑wIyIz∑wIz2其中 w w w是高斯权重, I x / I y / I z I_x/I_y/I_z Ix/Iy/Iz是3D梯度分量。
结构张量是实对称矩阵 ,可分解为3个特征值 λ 1 ≤ λ 2 ≤ λ 3 \lambda_1 \leq \lambda_2 \leq \lambda_3 λ1≤λ2≤λ3(对应梯度分布的三个主方向)。为过滤"边缘"或"平面"上的不稳定点,需施加两个规则:
- 特征值比例规则 :若 λ 3 / λ 1 > T \lambda_3 / \lambda_1 > T λ3/λ1>T( T T T通常取10),说明点位于边缘/平面,去除。
- 梯度方向规则 :计算局部梯度与特征向量 v 3 \mathbf{v}_3 v3(对应最大特征值的方向)的夹角 θ \theta θ,若 θ > 6 0 ∘ \theta > 60^\circ θ>60∘,说明方向不一致,去除。
过滤后剩余的点即为强关键点。
3. 方向分配:给关键点"定方向"
为让关键点具有旋转不变性,需为每个关键点分配"主方向":
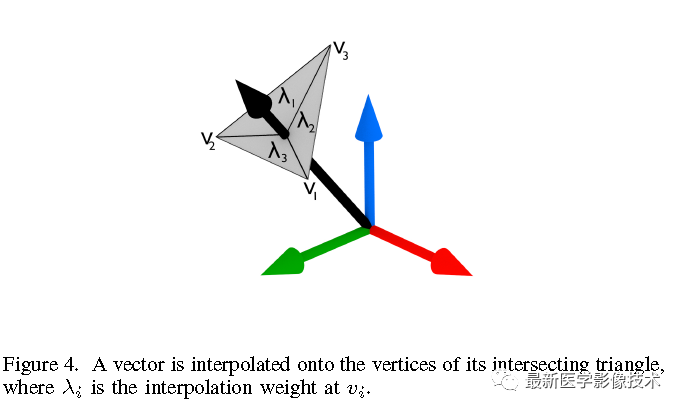
- 以关键点为中心,取二十面体区域(3D空间的对称区域,覆盖周围梯度信息);
- 计算区域内所有体素的3D梯度(大小+方向);
- 将二十面体的12个顶点作为"方向柱",对每个柱对应的三角形面内的梯度向量加权累加(权重为高斯距离),得到12个柱的梯度总和;
- 取总和最大的柱对应的方向,作为关键点的主方向。
4. 关键点描述符:用向量"描述"关键点
描述符是关键点的"特征指纹",用于后续匹配。SIFT3D的描述符构建步骤:
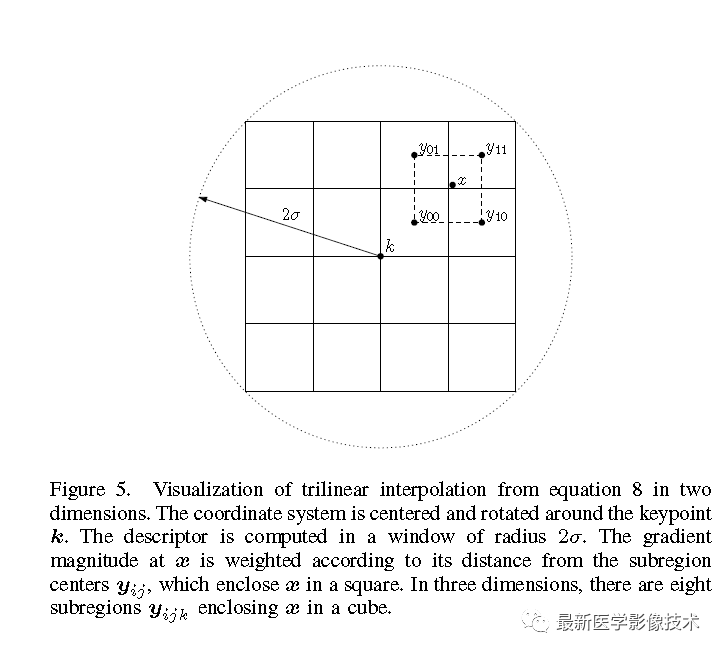
- 以关键点为中心,取半径为4的球形区域(对应主方向和尺度);
- 将球形区域划分为 4 × 4 × 4 4×4×4 4×4×4个立方体子块(共64个子块);
- 对每个子块,计算12个方向柱的梯度总和(同方向分配步骤);
- 拼接所有子块的柱向量,得到768维特征向量 ( 4 × 4 × 4 × 12 4×4×4×12 4×4×4×12)。
这个向量包含了关键点周围的梯度分布信息,具有尺度不变、旋转不变、光照不变 的特性。
SIFT3D vs 其他3D关键点算法
| 算法 | 优势 | 不足 |
|---|---|---|
| SIFT3D | 尺度+旋转不变,鲁棒性强 | 计算量大 |
| Harris3D | 计算快 | 无尺度不变性 |
| Harris6D | 结合法向量,旋转不变 | 对尺度变化敏感 |
SIFT3D因完整的尺度空间处理,成为医学影像中最常用的关键点检测算法。
二、SIFT3D的Python实现
原文使用C++的PCL库,以下提供Python版本的实现示例 (基于open3d和pclpy,需先安装open3d、pclpy)。
1. 环境准备
bash
pip install open3d pclpy numpy2. 代码实现:3D点云的SIFT关键点提取
python
import open3d as o3d
import numpy as np
from pclpy import pcl
from pclpy.pcl.keypoints import SIFTKeypoint
from pclpy.pcl.search import KdTree
def sift3d_detect(pcd_path: str, min_scale: float = 0.005, n_octaves: int = 6,
n_scales_per_octave: int = 4, min_contrast: float = 0.001):
# 1. 读取点云(PCD格式)
cloud = pcl.PointCloud.PointXYZ()
if not pcl.io.loadPCDFile(pcd_path, cloud):
raise ValueError(f"无法读取文件: {pcd_path}")
print(f"原始点云数量: {cloud.size()}")
# 2. 初始化SIFT3D检测器
sift = SIFTKeypoint.PointXYZ_PointWithScale()
sift.setInputCloud(cloud)
# 设置尺度参数(与原文C++代码一致)
sift.setScales(min_scale, n_octaves, n_scales_per_octave)
sift.setMinimumContrast(min_contrast)
# 3. 构建KD树(用于邻域搜索)
tree = KdTree.PointXYZ()
sift.setSearchMethod(tree)
# 4. 计算关键点
keypoints = pcl.PointCloud.PointWithScale()
sift.compute(keypoints)
print(f"检测到关键点数量: {keypoints.size()}")
# 5. 可视化(原始点云+绿色关键点)
o3d_cloud = o3d.geometry.PointCloud()
o3d_cloud.points = o3d.utility.Vector3dVector(np.asarray(cloud.points()))
o3d_keypoints = o3d.geometry.PointCloud()
keypoints_np = np.asarray(keypoints.points())[:, :3] # 取前三维坐标
o3d_keypoints.points = o3d.utility.Vector3dVector(keypoints_np)
o3d_keypoints.paint_uniform_color([0, 1, 0]) # 绿色标记关键点
# 显示结果
viewer = o3d.visualization.Visualizer()
viewer.create_window(window_name="SIFT3D KeyPoints")
viewer.add_geometry(o3d_cloud)
viewer.add_geometry(o3d_keypoints)
viewer.run()
viewer.destroy_window()
return keypoints
# 示例调用
if __name__ == "__main__":
pcd_path = "medical_point_cloud.pcd" # 替换为你的3D点云路径
sift3d_detect(pcd_path)3. 医学影像的关键点与描述符提取
若处理的是三维医学影像(如NIfTI格式) ,可使用SimpleITK读取体积数据,再调用论文作者提供的SIFT3D库(需编译C++代码,或使用Python绑定)。核心步骤如下:
python
import SimpleITK as sitk
# 1. 读取医学影像(NIfTI格式)
image = sitk.ReadImage("ct_scan.nii.gz")
image_np = sitk.GetArrayFromImage(image) # 转换为numpy数组(z,y,x顺序)
# 2. 初始化SIFT3D参数(需调用作者的C++库)
sift3d_params = {
"min_scale": 0.005,
"n_octaves": 6,
"min_contrast": 0.001
}
# 3. 检测关键点(作者提供的SIFT3D_detect_keypoints函数)
keypoints = sift3d_detect_keypoints(image_np, sift3d_params)
# 4. 提取描述符(SIFT3D_extract_descriptors函数)
descriptors = sift3d_extract_descriptors(image_np, keypoints)
# 5. 保存结果
np.save("keypoints.npy", keypoints)
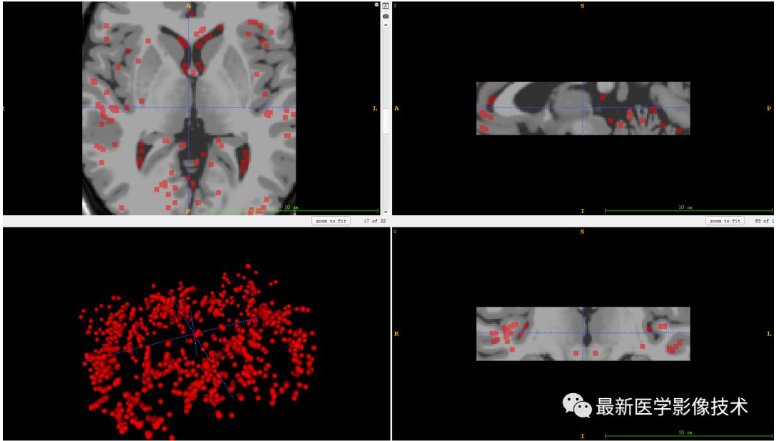
np.save("descriptors.npy", descriptors)三、结果可视化:将关键点画在医学影像上
检测到的关键点可通过SimpleITK或matplotlib绘制在三维切片上:
python
import matplotlib.pyplot as plt
# 取影像的中间切片(z轴中间层)
middle_slice = image_np.shape[0] // 2
slice_np = image_np[middle_slice, :, :]
# 提取该切片的关键点(z坐标等于middle_slice)
slice_keypoints = [kp for kp in keypoints if kp[0] == middle_slice]
# 绘制切片与关键点
plt.imshow(slice_np, cmap="gray")
for kp in slice_keypoints:
plt.scatter(kp[2], kp[1], s=50, c="red", marker="o") # x,y坐标对应图像的列,行
plt.title(f"Slice {middle_slice} with SIFT3D Keypoints")
plt.axis("off")
plt.savefig("keypoints_slice.png")
plt.show()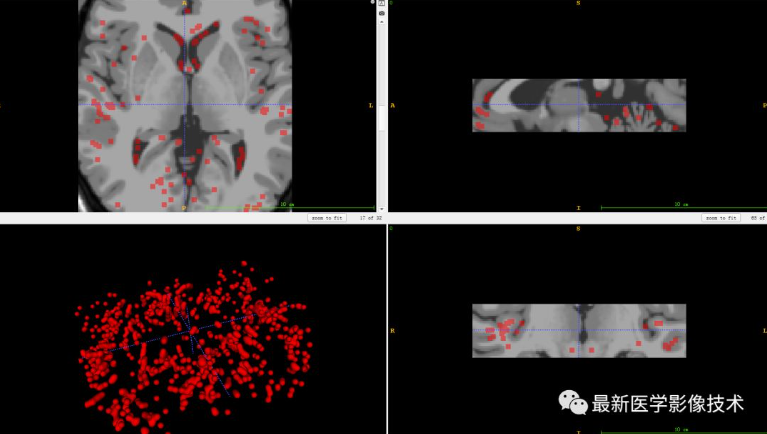
总结
SIFT3D通过尺度空间处理 和三维梯度分析 ,解决了医学影像的关键点检测问题,其768维描述符为后续的影像匹配、重建提供了强鲁棒的特征基础。相比Harris3D等算法,SIFT3D的尺度不变性使其在医学影像的"多分辨率分析"中更具优势------无论是局部病灶的细节,还是整体器官的结构,都能准确提取特征点。
获取更多资料
我给大家整理了一套全网最全的人工智能学习资料(1.5T),包括:机器学习,深度学习,大模型,CV方向,NLP方向,kaggle大赛,实战项目、自动驾驶,AI就业等免费获取 。