1、Hall 自学习的引入
-
问题总结
-
3 个 hall 间隔并非理想的 120°,有可能有的相差115°,有的相差125°等;但我们并不知道它们之间的精确间隔
-
速度、电角度计算模型按照:3 个 hall 之间依次间隔 120°,每个 hall 状态依次相差 60° 进行处理
-
因此导致电角度计算不精确
-
-
核心原因
-
尝试过一些方法,最终都离不开测量 / 基准电角度与计算电角度之间的校正,只是校正方法不同,如:每个 hall 状态都较正,一个电角度周期校正 1 次,以及其它一些方法,但在测量电角度有误差的情况下,怎么校正总也不那么理想
-
问题核心:不知道 3 个 hall 的精确间隔 或 3 个 hall 的精确位置
-
-
解决方案
-
采用合适的方法,比如 IF 控制,不需要任何传感器,通过自主生成电角度来间接得到近似真实的电角度
-
让电机平滑的转起来,自然会触发每个 hall 状态,记录下此时的电角度,就是每个 hall 状态相对精确的位置
-
有了每个 hall 状态相对精确的位置后,再通过插值、校正就可以输出平滑、准确的电角度
-
以上我们称之为 "hall 自学习"!--- 学习 "三个 hall 的准确位置"
-
2、方案要点
-
方案概述
-
采用合适的方法,比如IF 控制 ,不需要任何传感器,通过自主生成电角度来间接得到近似真实的电角度
-
让电机平滑转动,自然会触发每个 hall 状态,记录下此时的电角度,就是每个 hall 状态相对精确的位置
-
有了每个 hall 状态相对精确的位置后,再通过插值、校正就可以输出平滑、准确的电角度
-
-
如何实现?
-
核心:IF 控制自主生成电角度来间接得到近似真实的电角度
-
实现要点:先给出结论
-
空载
-
相对较大的电流
-
合适的参考转速、电流,让电机平滑转动
-
-
3、IF控制原理
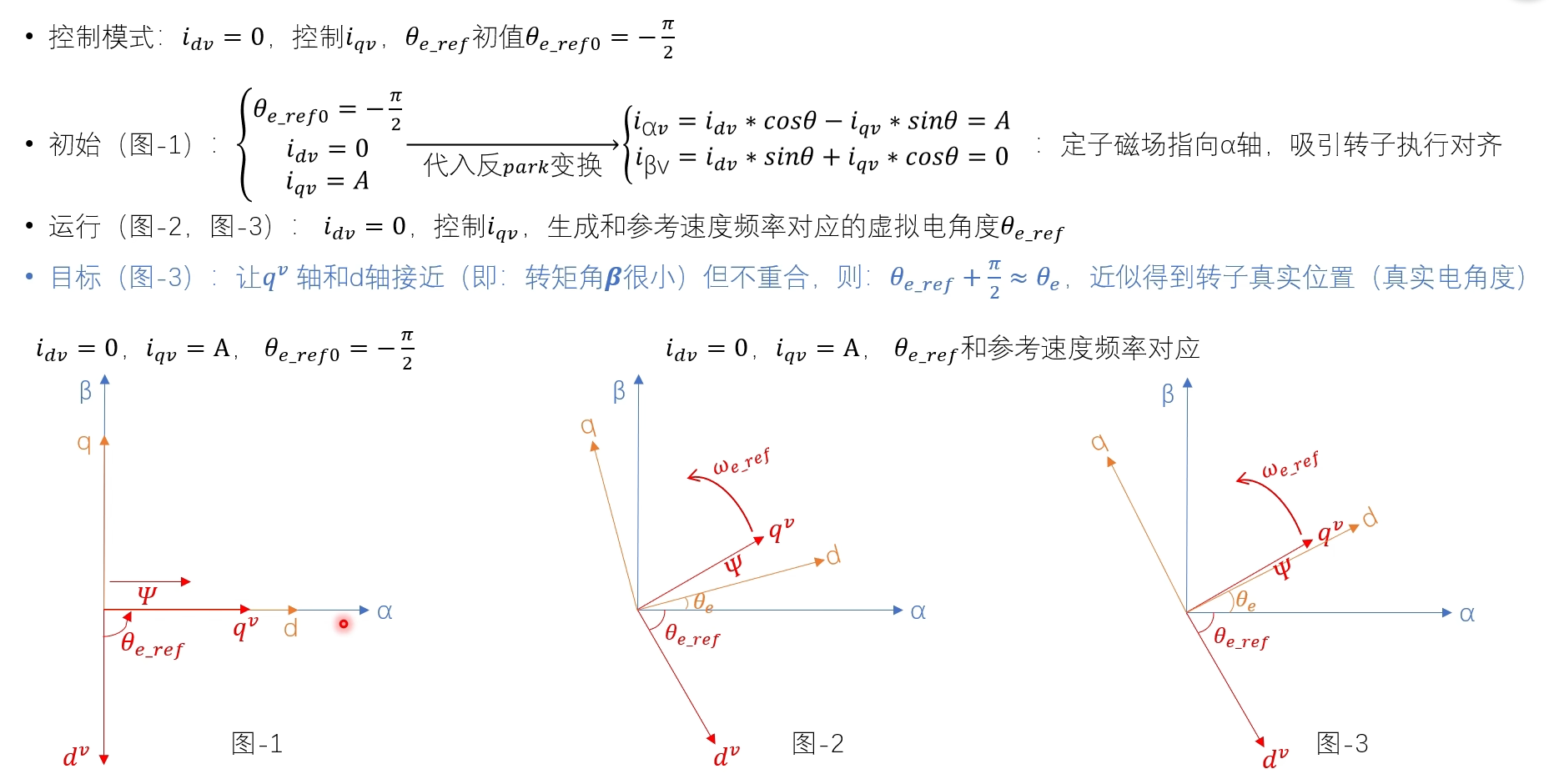
基于虚拟的坐标去生成虚拟的电角度,无法保证转矩角位二分之π,所以输出转矩并不是最大的;

4、hall自学习控制方式与目标
在无位置传感器控制(如 hall 自学习的 IF 控制)中,需要通过虚拟电角度θe_ref 来近似转子的真实电角度θe。当qv轴和 d 轴接近时,转矩角β很小,此时满足θe_ref+2π≈θe,从而可以通过虚拟电角度推导得到转子真实位置。
虚拟坐标系(dv−qv轴)由θe_ref定义,用于生成控制所需的虚拟电流分量(idv=0,iqv=A)。
真实转子的 d 轴由永磁体磁场方向决定,是电机电磁转矩生成的基准轴。
当qv轴与 d 轴接近时,虚拟磁场和真实转子磁场的相对位置关系被 "校准",使得虚拟电角度和真实电角度的偏差可忽略,进而实现从虚拟角度到真实角度的近似推导,为无位置传感器的电流控制、转矩控制提供准确的位置依据。
5、IF自主生成的电角度 与真实电角度的关系
转矩角就是qv与d轴的夹角;
电流为0.1A是转矩角过大,显然无法带动电机运转;

增大电流,缩小转矩角,再次测试,符合预期

保持电流不变,增大负载,再次测试,此时转矩角增大,不符合预期

继续增大电流,转矩角变小,但是转速波动较大
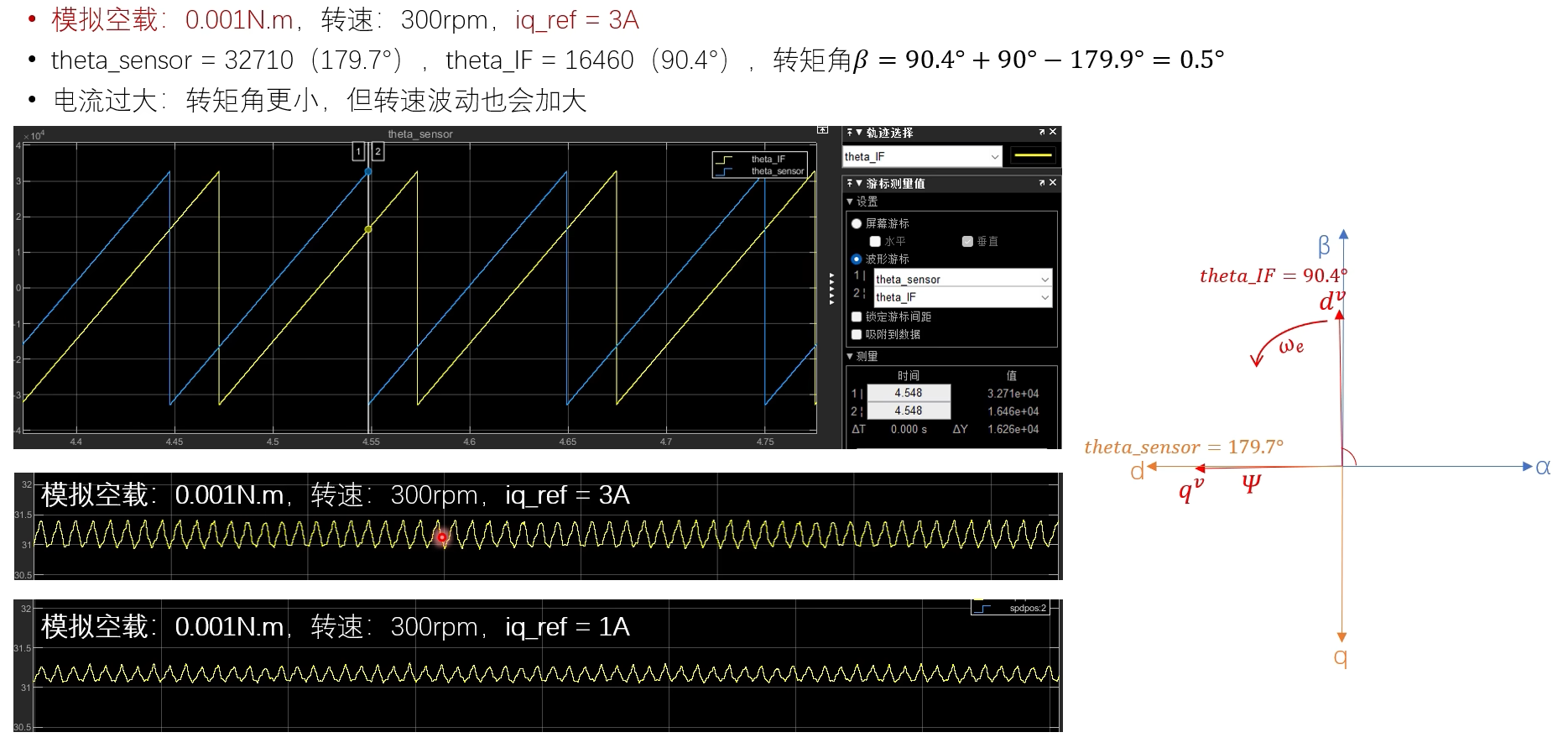
综上所示,并非转矩角越小越好,并非电流越大越好,应根据测试情况选取合适的电流值,及推算出的转矩角;
6、hall自学习的实现
-
将每个 hall 状态、对应电角度存入缓冲区;只要有一个 hall 状态捕获次数达到 16 次,自学习完成
-
对每个 hall 状态多次捕获的电角度求平均值,得到每个 hall 状态最终的电角度,写入 hall 状态表 /hall 状态角度表,存入 FLASH

hall自学习与非霍尔自学习对比
-
非自学习:在 hall 相位偏移基础上,按 3 个 hall 依次间隔 120° 为每个 hall 状态赋予测量电角度
-
自学习:直接为每个 hall 状态赋予自学习得到的电角度,这是绝对电角度,无需单独考虑 hall 相位偏移
hall自学习在IF控制模式下进行自学习,把hall电角度存入数组里,到速度电流双闭环控制时,调用初始化hall函数,对hall电角度进行查表操作;
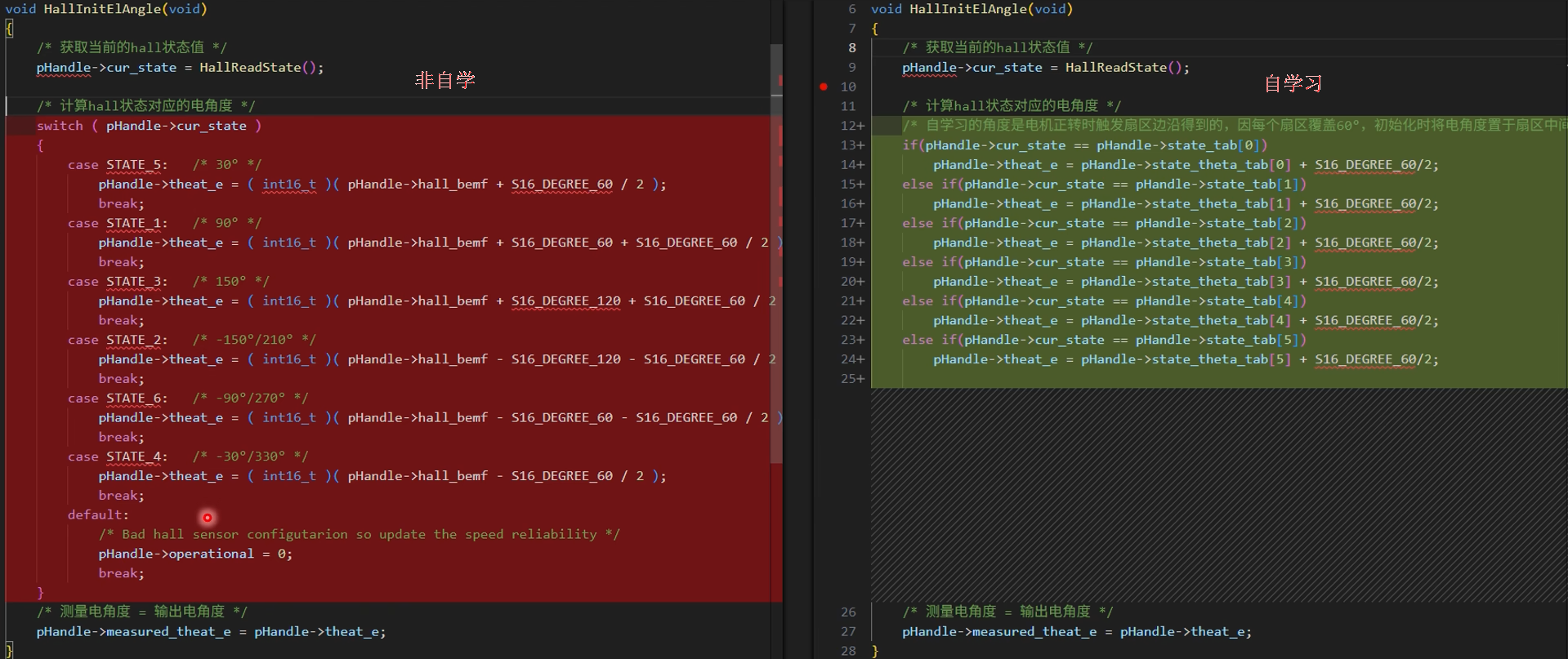
因为是边缘捕获,对每个电角度都加上30度,使其出于扇区的中间位置;
7.hall自学习的优点
更加精准、平滑的电角度输出。学习得到每个 hall 状态绝对电角度,已经包含了 hall 相位偏移:无需单独测量 hall 相位偏移角
hall 信号线 Ha,Hb,Hc 顺序随便接,或者叫 hall 信号线自适应。
hall 自学习应用时。输入上次、当前捕获的 hall 状态:同 hall 状态表 /hall 状态角度表中的次序对比,可以得到当前的转动方向。输入当前捕获的 hall 状态,从之前记录的 hall 状态表 /hall 状态角度表中可得到当前状态对应的电角度。hall 自学习执行时:记录了每个 hall 状态及其对应的电角度,记录的 hall 状态次序和电机正转时 hall 状态的捕获次序相同,具体是什么,我们不关心,也不需要关心
仿真对比
