在机器人学习领域,获取高质量的真实世界训练数据一直是一个昂贵且耗时的瓶颈。卡内基梅隆大学的研究团队提出了一种名为"LLM Trainer"的创新框架,利用大语言模型(LLM)的世界知识,仅需单次人类演示 即可自动生成大量有效的训练数据。本文将重点剖析该系统如何在Franka Research 3 (Franka Emika Panda) 机械臂平台上成功落地,完成复杂的长程操作任务,并展示其在硬件实验中超越仿真预期的惊人表现。
引言:打破硬件数据的稀缺困局
对于像Franka Research 3这样广泛应用于科研与工业的协作机械臂而言,模仿学习(Imitation Learning, IL)是实现复杂操作的有效途径。然而,传统的模仿学习往往需要专家手动采集数十甚至上百条演示轨迹,这不仅效率低下,且难以覆盖所有可能的场景变化。
LLM Trainer 的出现旨在解决这一痛点。它通过利用LLM 的语义理解能力,自动识别演示中的关键帧(Keyframes)和物体关系,并将这些关键帧适配到新场景中,从而通过"数据增强"的方式,从单条演示裂变出成百上千条训练数据。
https://www.bilibili.com/video/BV1daSYBVEfE/?vd_source=c6026b80534c241e45e611d020fa0e84
核心机制:LLM驱动的闭环生成
在深入硬件实现之前,简要理解LLM Trainer 的工作流至关重要。该系统主要包含两个步骤:
**1.**离线演示注释 :LLM分析人类演示,提取关键时间步和相关物体。
在线关键姿态重定向 :根据新场景的初始观察,LLM调整关键帧,并通过轨迹变形(Trajectory Warping)生成新路径。
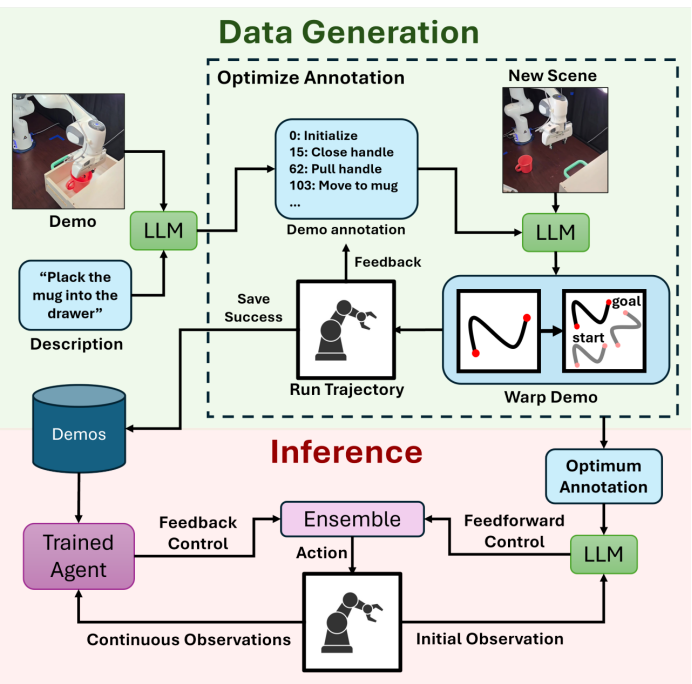
为了确保生成数据的质量,研究团队引入了Thompson Sampling(汤普森采样) 算法,将数据生成过程建模为多臂老虎机问题,自动优化LLM 的注释策略,显著提升了生成成功率。
FrankaResearch3上的硬件挑战与解决方案
在仿真环境中,物体的位置是已知的"上帝视角",但在真实的 Franka 机械臂实验中,感知是一个巨大的挑战。为了在硬件上实现全自动数据生成,研究团队为 Franka 机械臂构建了一套任务无关的感知与执行管线 。
1. 视觉感知堆栈:摆脱人工标注
为了让Franka 机械臂能够像在仿真中一样理解环境,该系统集成了一套强大的视觉模型组合:
-
LLM + 语义理解 :首先由LLM 识别任务中涉及物体的名称和颜色。
-
Grounding DINO + SAM:利用Grounding DINO 进行开放集物体检测,再结合 Segment Anything Model (SAM) 从 RGB-D 图像中提取精确的物体分割掩码。
-
点云配准:通过RANSAC 和 ICP 算法,将参考点云与观测点云进行匹配,从而计算出物体在真实世界中的 6D 姿态。
这一感知流程使得Franka 机械臂无需任何预设的物体位置信息,即可适应随机化的物理环境。
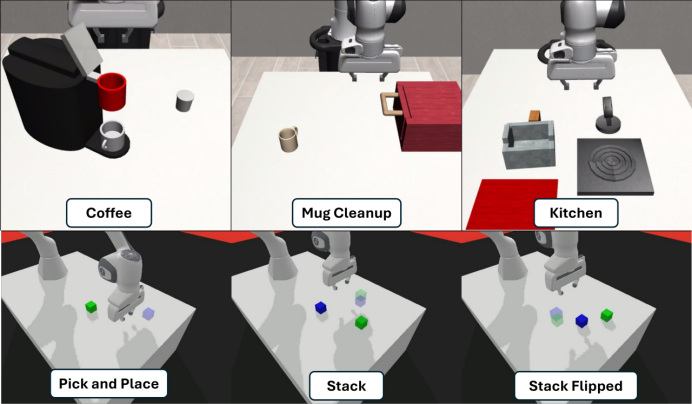
2. 硬件实验任务:"马克杯清理" (Mug Cleanup)
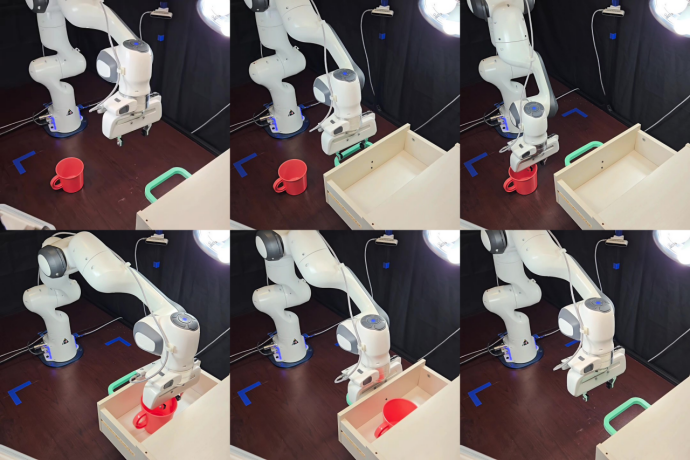
实验设计了一个对于单臂机器人极具挑战性的长程任务------"马克杯清理" 。
-
任务流程 :Franka 机械臂需要依次完成:(1) 打开抽屉;(2) 抓取桌面上随机位置的马克杯;(3) 将马克杯放入抽屉;(4) 关闭抽屉。
-
随机性挑战 :马克杯被放置在机器人前方20cmx30cm的区域内,且存在 ±45∘的随机旋转。这要求生成的轨迹必须具备极高的泛化能力。
实验结果:物理世界优于仿真的反直觉现象
1. 高效的数据生成
研究团队使用LLM Trainer 进行了 132 次自动尝试,成功生成了 100 条有效演示 ,平均生成成功率达到75.8% 。在使用经过优化的最佳注释策略时,成功率更是高达82% 。
值得注意的是一个有趣的现象 :该方法在物理硬件上的表现竟然优于仿真环境。研究人员分析,这是因为在仿真中,物体的坐标原点通常定义在把手等位置,而在物理实验中,基于点云计算的几何中心(Centroid)作为参考点更加稳定,更利于 LLM 理解和推断物体的姿态变化。
2. 强大的策略表现:集成学习 (Ensembling)
利用生成的100 条数据,团队训练了一个模仿学习(IL)智能体,并将其与 LLM 前馈控制策略进行集成(Ensemble)。测试结果如下:
-
纯模仿学习(IL) 代理 :成功率60%。
-
LLM 前馈控制 :成功率80%。
-
集成策略(Ensembled Agent) :成功率85% 。
集成策略结合了LLM 的长程规划能力和 IL 策略的闭环修正能力。当检测到 LLM 规划出现偏差时,IL 策略会接管控制进行修正,随后再交还给 LLM 继续执行。这种机制在 Franka 机械臂上表现出了极高的鲁棒性。
结论与展望:
基于Franka Research 3 的实验证明,LLM Trainer 不仅仅是一个理论框架,更是一个切实可行的硬件解决方案。它成功地将大语言模型的世界知识转化为机器人的物理操作能力,仅凭单次演示 和一句文本描述 ,就能驱动Franka 机械臂适应多变的现实环境。
这一成果为拥有Franka 机械臂的研究者提供了一个新的范式:不再需要耗费数小时手动示教,而是利用 LLM 作为"数据工厂",快速通过低成本的单次示教,通过自动化生成管线,让机器人掌握复杂的长程操作技能。这不仅降低了机器人学习的门槛,也为未来实现更通用的机器人智能铺平了道路。
**论文地址:**https://arxiv.org/pdf/2509.20070v1