文章目录
- [Why Diffusion Models Don't Memorize: The Role of Implicit Dynamical Regularization in Training](#Why Diffusion Models Don’t Memorize: The Role of Implicit Dynamical Regularization in Training)
-
- [1. 摘要](#1. 摘要)
- [2. 问题背景与研究动机](#2. 问题背景与研究动机)
- [3. 唯象学观察:训练动力学的实证分析](#3. 唯象学观察:训练动力学的实证分析)
-
- [3.1 时间尺度的分离](#3.1 时间尺度的分离)
- [3.2 关键缩放律 (Scaling Laws)](#3.2 关键缩放律 (Scaling Laws))
- [3.3 排除样本重复的影响](#3.3 排除样本重复的影响)
- [4. 理论解析:高维随机特征模型 (RFNN)](#4. 理论解析:高维随机特征模型 (RFNN))
-
- [4.1 模型设定](#4.1 模型设定)
- [4.2 谱分析 (Spectral Analysis)与时间尺度](#4.2 谱分析 (Spectral Analysis)与时间尺度)
- [5. 相图与正则化机制 (Phase Diagram)](#5. 相图与正则化机制 (Phase Diagram))
- [6. 对从业者的启示](#6. 对从业者的启示)
- [7. 结论](#7. 结论)
- [Does Reinforcement Learning Really Incentivize Reasoning Capacity in LLMs Beyond the Base Model](#Does Reinforcement Learning Really Incentivize Reasoning Capacity in LLMs Beyond the Base Model)
-
- [1. 摘要](#1. 摘要)
- [2. 研究方法论](#2. 研究方法论)
-
- [2.1 核心评估指标:Pass@k](#2.1 核心评估指标:Pass@k)
- [2.2 实验设置](#2.2 实验设置)
- [3. 核心发现与实验结果](#3. 核心发现与实验结果)
-
- [3.1 现象:小 k 占优,大 k 劣势](#3.1 现象:小 k 占优,大 k 劣势)
- [3.2 覆盖率分析 (Coverage Analysis)](#3.2 覆盖率分析 (Coverage Analysis))
- [3.3 困惑度分析 (Perplexity Analysis)](#3.3 困惑度分析 (Perplexity Analysis))
- [3.4 与蒸馏 (Distillation) 的对比](#3.4 与蒸馏 (Distillation) 的对比)
- [4. 算法与训练动力学分析](#4. 算法与训练动力学分析)
-
- [4.1 采样效率差距 ( Δ S E \Delta_{SE} ΔSE)](#4.1 采样效率差距 ( Δ S E \Delta_{SE} ΔSE))
- [4.2 训练过程中的退化](#4.2 训练过程中的退化)
- [5. 结论与启示](#5. 结论与启示)
-
- [5.1 为什么 RLVR 没有带来新能力?](#5.1 为什么 RLVR 没有带来新能力?)
- [5.2 未来方向](#5.2 未来方向)
- [Gated Attention for Large Language Models: Non-linearity, Sparsity, and Attention-Sink-Free](#Gated Attention for Large Language Models: Non-linearity, Sparsity, and Attention-Sink-Free)
-
- [1. 摘要](#1. 摘要)
- [2. 研究背景与动机](#2. 研究背景与动机)
- [3. 方法论:门控注意力层 (Gated Attention Layer)](#3. 方法论:门控注意力层 (Gated Attention Layer))
-
- [3.1 探索的设计空间](#3.1 探索的设计空间)
- [3.2 最佳实践结论](#3.2 最佳实践结论)
- [4. 实验结果与性能分析](#4. 实验结果与性能分析)
-
- [4.1 模型性能提升](#4.1 模型性能提升)
- [4.2 训练稳定性 (Training Stability)](#4.2 训练稳定性 (Training Stability))
- [5. 机理分析:为什么门控有效?](#5. 机理分析:为什么门控有效?)
-
- [5.1 非线性增强低秩映射](#5.1 非线性增强低秩映射)
- [5.2 引入输入依赖的稀疏性 (Input-Dependent Sparsity)](#5.2 引入输入依赖的稀疏性 (Input-Dependent Sparsity))
- [5.3 消除 Attention Sink (Attention-Sink-Free)](#5.3 消除 Attention Sink (Attention-Sink-Free))
- [6. 结论](#6. 结论)
Why Diffusion Models Don't Memorize: The Role of Implicit Dynamical Regularization in Training
1. 摘要
扩散模型(Diffusion Models, DMs)在生成任务中取得了巨大成功,但其避免记忆训练数据并实现泛化的机制尚不明确。本研究通过理论分析(高维随机特征模型)和数值实验(CelebA数据集上的U-Net)揭示了扩散模型训练过程中存在的一种 隐式动力学正则化(Implicit Dynamical Regularization) 机制。
核心发现包括:
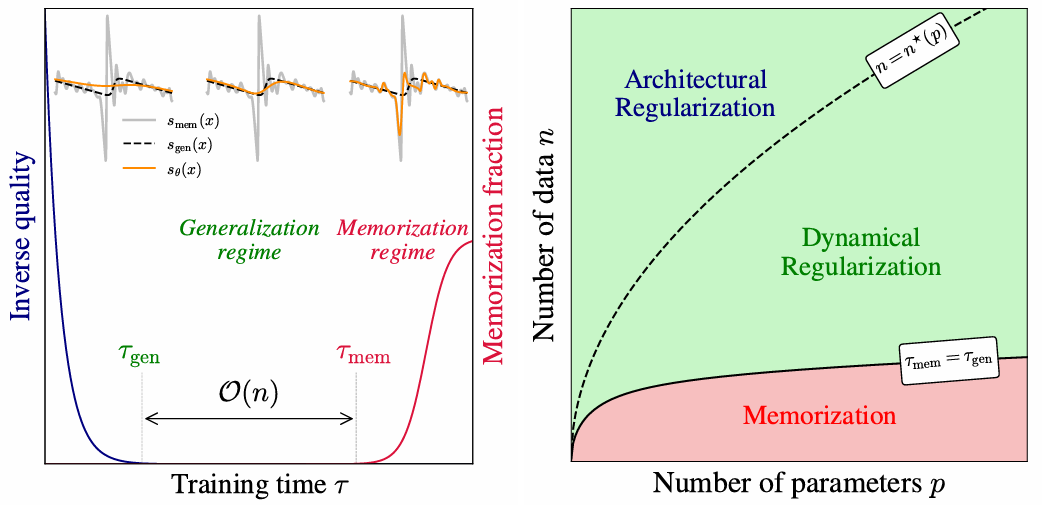
- 双时间尺度分离 :训练过程中存在两个显著分离的时间尺度。 τ g e n \tau_{gen} τgen 为模型生成高质量样本的起始时间, τ m e m \tau_{mem} τmem 为模型开始记忆训练数据的起始时间。
- τ m e m \tau_{mem} τmem 的线性缩放律 : τ m e m \tau_{mem} τmem 随训练集大小 n n n 线性增长( τ m e m ∝ n \tau_{mem} \propto n τmem∝n),而 τ g e n \tau_{gen} τgen 保持恒定。这意味着随着数据量增加,有效泛化的时间窗口 τ g e n , τ m e m \\tau_{gen}, \\tau_{mem} τgen,τmem 会显著变宽。
- 相变机制 :研究识别了基于数据量 n n n 和模型参数量 p p p 的三个相变区域:记忆化区域、动力学正则化区域(泛化窗口)和架构正则化区域( n > n ∗ ( p ) n > n^*(p) n>n∗(p),过拟合完全消失) 。
2. 问题背景与研究动机
在当前的生成式建模中,扩散模型通过最小化分数匹配损失(score matching loss)来学习数据分布的分数函数 ∇ x log P t ( x ) \nabla_x \log P_t(x) ∇xlogPt(x)。然而,理论上如果在经验分布上通过无限容量的模型进行训练,最优解(Empirical Score)应当是对应于训练样本的delta函数混合,这会导致模型在反向生成过程中完美复现训练样本(即记忆化)。
但在实践中,即使在过参数化(overparameterized)的设置下,扩散模型依然表现出优秀的泛化能力。本论文旨在解释这一现象,即训练动力学(Training Dynamics)和早停(Early Stopping) 如何在高维空间中阻止模型收敛到单纯记忆训练数据的解。
3. 唯象学观察:训练动力学的实证分析
作者在 CelebA 数据集上训练 U-Net 架构,通过改变训练集大小 n n n 和模型宽度 W W W(控制参数量 p p p),观察 FID(Fréchet Inception Distance)和记忆分数 f m e m f_{mem} fmem 的演变。
3.1 时间尺度的分离
- 泛化阶段 ( τ g e n \tau_{gen} τgen) :训练初期,FID 迅速下降并在 τ g e n \tau_{gen} τgen 处达到最优。此时生成的样本具有高质量且未出现记忆化 ( f m e m ≈ 0 f_{mem} \approx 0 fmem≈0) 。
- 记忆化阶段 ( τ m e m \tau_{mem} τmem) :随着训练继续,在 τ m e m \tau_{mem} τmem 时刻, f m e m f_{mem} fmem 开始上升,生成的样本逐渐逼近训练集中的最近邻样本。
3.2 关键缩放律 (Scaling Laws)
- 训练集大小 n n n 的影响 :
- τ g e n \tau_{gen} τgen 与 n n n 无关 。
- τ m e m \tau_{mem} τmem 与 n n n 呈线性关系( τ m e m ∝ n \tau_{mem} \propto n τmem∝n)。通过重缩放时间轴 τ / n \tau/n τ/n,不同 n n n 下的记忆化曲线完美重合。
- 结论:增加数据量直接推迟了过拟合的发生,扩大了泛化窗口。
- 模型容量 p p p 的影响 :
- 随着模型宽度 W W W 增加, τ g e n ∝ W − 1 \tau_{gen} \propto W^{-1} τgen∝W−1 且 τ m e m ∝ n W − 1 \tau_{mem} \propto nW^{-1} τmem∝nW−1。
- 更高容量的模型学得更快,也更早开始记忆,但只要 n n n 足够大,泛化窗口依然存在。
3.3 排除样本重复的影响
为了验证 τ m e m ∝ n \tau_{mem} \propto n τmem∝n 并非单纯因为样本被重复"观看"的次数,作者对比了固定 Batch Size 和 Full Batch( B = n B=n B=n)的训练。结果显示,即使在 Full Batch 模式下(每一步更新所有样本都被使用), τ m e m \tau_{mem} τmem 依然随 n n n 线性增长。这证明了记忆化是由损失景观(Loss Landscape)的性质决定的,而非样本重复频率 。
4. 理论解析:高维随机特征模型 (RFNN)
为了从数学上解释上述现象,作者利用高维极限下的随机特征神经网络(Random Features Neural Network, RFNN)进行了严格推导。
4.1 模型设定
- 分数函数近似 : s A ( x ) = A p σ ( W x d ) s_A(x) = \frac{A}{\sqrt{p}}\sigma(\frac{Wx}{\sqrt{d}}) sA(x)=p Aσ(d Wx),其中 W W W 是冻结的随机权重, A A A 是训练参数 。
- 高维极限 :研究 n , p , d → ∞ n, p, d \to \infty n,p,d→∞ 的情况,保持比率 ψ n = n / d \psi_n = n/d ψn=n/d 和 ψ p = p / d \psi_p = p/d ψp=p/d 固定 。
- 动力学方程 :在梯度流(Gradient Flow)下,参数 A ( τ ) A(\tau) A(τ) 的演化由核矩阵 U U U 的特征值决定 。
4.2 谱分析 (Spectral Analysis)与时间尺度
核心理论发现在于核矩阵 U U U 的特征值谱密度 ρ ( λ ) \rho(\lambda) ρ(λ) 在过参数化区域( ψ p ≫ ψ n \psi_p \gg \psi_n ψp≫ψn)分裂为两个分离的"块(Bulk)" :
-
泛化块 ( ρ 2 \rho_{2} ρ2):
- 特征值量级: O ( ψ p ) \mathcal{O}(\psi_p) O(ψp)。
- 物理意义:对应于总体协方差(Population Covariance),代表真实数据分布的结构(低频分量)。
- 动力学影响:驱动训练的快速阶段,对应 τ g e n ∼ 1 / Δ t \tau_{gen} \sim 1/\Delta_t τgen∼1/Δt。在此阶段,模型学习总体分数(Population Score), L t e s t ≈ L t r a i n \mathcal{L}{test} \approx \mathcal{L}{train} Ltest≈Ltrain 。
-
记忆化块 ( ρ 1 \rho_{1} ρ1):
- 特征值量级: O ( ψ p / ψ n ) \mathcal{O}(\psi_p/\psi_n) O(ψp/ψn)。
- 物理意义:对应于经验噪声(Empirical Noise),即训练样本特有的高频涨落。
- 动力学影响:驱动训练的慢速阶段,对应 τ m e m ∝ ψ n \tau_{mem} \propto \psi_n τmem∝ψn。在此阶段,模型开始过拟合经验分数,导致记忆化 。
理论结论 :由于特征值量级相差 ψ n \psi_n ψn 倍,导致对应的时间尺度 τ m e m \tau_{mem} τmem 与 τ g e n \tau_{gen} τgen 之间出现了 O ( n ) \mathcal{O}(n) O(n) 的分离。这为"隐式动力学正则化"提供了坚实的数学基础。
5. 相图与正则化机制 (Phase Diagram)
基于实验和理论,论文提出了 n − p n-p n−p 平面上的三个状态区域 :
-
记忆化区域 (Memorization Regime):
- 条件: n n n 较小, p p p 较大。
- 现象: τ m e m ≈ τ g e n \tau_{mem} \approx \tau_{gen} τmem≈τgen,模型在学习到有效特征的同时迅速过拟合。
-
动力学正则化区域 (Dynamical Regularization Regime):
- 条件: n n n 中等大小。
- 现象: τ g e n ≪ τ m e m \tau_{gen} \ll \tau_{mem} τgen≪τmem。
- 策略:存在显著的时间窗口,通过**早停(Early Stopping)**可以获得完美的泛化模型,避免记忆化。这是目前大多数大规模扩散模型工作的区域 。
-
架构正则化区域 (Architectural Regularization Regime):
- 条件: n > n ∗ ( p ) n > n^*(p) n>n∗(p)。
- 现象:即使 τ → ∞ \tau \to \infty τ→∞,模型也无法记忆数据。因为数据量超出了模型的表达能力(对于记忆噪声而言),模型被迫学习光滑的插值解。
6. 对从业者的启示
对于使用 Python/PyTorch 进行扩散模型开发的研究者,本论文提供了以下实践指导:
- 早停至关重要 :在数据量有限但模型庞大(过参数化)的场景下,记忆化几乎是必然的终点。必须监控生成质量(如 FID)并在 τ m e m \tau_{mem} τmem 之前停止训练。
- 数据量的红利 :增加训练数据 n n n 不仅是为了覆盖更多分布,更是为了线性地推迟 τ m e m \tau_{mem} τmem。如果计算资源允许,增加数据是扩大"安全训练窗口"的最有效手段 。
- 优化器的选择 :虽然论文主要分析 SGD,但实验证明 Adam 优化器 表现出相同的缩放规律( τ m e m ∝ n \tau_{mem} \propto n τmem∝n),尽管 Adam 的收敛速度更快,导致绝对时间尺度缩短。在使用 Adam 时,需要更频繁地进行 Checkpoint 评估以捕捉泛化窗口。
- 模型容量控制 :增加模型宽度 W W W 会缩短 τ g e n \tau_{gen} τgen(学得更快),但也会线性缩短 τ m e m \tau_{mem} τmem。在小数据量下盲目增加模型大小可能导致泛化窗口过窄而难以控制。
7. 结论
本论文通过严谨的理论与实验论证了扩散模型之所以不记忆,并非因为它们不能,而是因为训练动力学中的 谱偏差(Spectral Bias) 优先学习低频的总体特征(泛化),而延迟了高频的样本特定噪声(记忆化)的学习。这种随数据量 n n n 线性增长的时间延迟,构成了扩散模型在过参数化设置下能够有效泛化的核心机制。
Does Reinforcement Learning Really Incentivize Reasoning Capacity in LLMs Beyond the Base Model
xhs
强化学习可以更有效的采样,但是基座模型决定性能上限
任意一个答案在模型中都有概率,只是不同模型中概率大小不同。rl能增大正确答案的概率不就是正确且有效的么。训练本来就不是创造答案,只是增加好的答案的概率。
1. 摘要
本研究对基于可验证奖励的强化学习(RLVR,如 OpenAI-o1 或 DeepSeek-R1 背后的技术)在提升大语言模型(LLM)推理能力方面的实际效果进行了批判性审查。尽管学界普遍认为 RLVR 能像传统 RL(如 AlphaGo)一样通过自我博弈发现新策略从而超越基座模型,但本文通过在大 k k k 值下的 pass@k 指标评测发现:
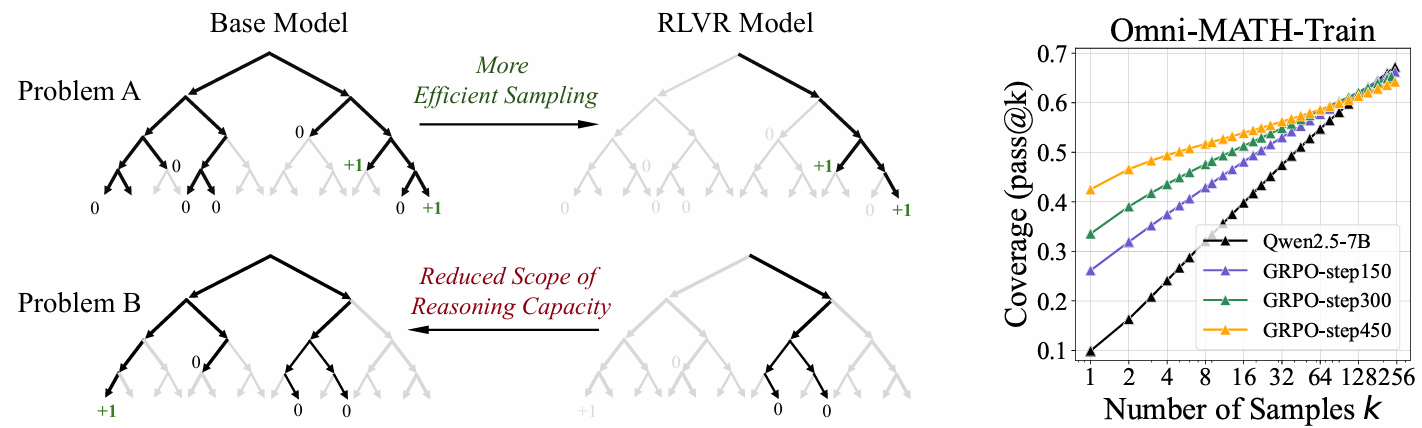
- 推理边界收缩 :RLVR 虽然提升了模型采样正确路径的概率(即提高了
pass@1),但实际上缩小了模型能解决问题的总范围。在 k k k 值较大(如 k = 256 k=256 k=256)时,基座模型(Base Model)的表现始终优于 RLVR 模型。 - 缺乏新能力涌现:RLVR 模型生成的推理路径完全包含在基座模型的采样分布中,并未涌现出基座模型原本不具备的"新"推理模式。
- 算法同质性 :包括 PPO、GRPO、Reinforce++ 在内的六种主流 RLVR 算法表现相似,且距离充分挖掘基座模型潜力(即达到基座模型的
pass@k上界)仍有巨大差距。 - 与蒸馏的本质区别:与 RLVR 不同,知识蒸馏(Distillation)确实能够通过引入教师模型的模式来扩展模型的推理边界。
2. 研究方法论
2.1 核心评估指标:Pass@k
为了探究模型的"推理能力边界"(Reasoning Capacity Boundary),而非仅仅是平均表现,作者采用了 pass@k 指标。
- 定义 :对于给定的问题,从模型中采样 k k k 个输出,若其中至少有一个通过验证,则视为解决。
- 物理意义 :
pass@k(特别是当 k k k 很大时)反映了模型潜在的能力上限。如果 RLVR 真的让模型学会了新的推理技能,那么在相同的 k k k 下,RLVR 模型理应解决一些基座模型无法解决的问题。 - 无偏估计器:为了降低方差,论文使用了以下无偏估计公式(Python 实现参考):
2.2 实验设置
- 任务领域:数学(AIME, GSM8K, MATH, Minerva等)、代码生成(LiveCodeBench, HumanEval+)、视觉推理(MathVista)。
- 模型家族:Qwen2.5 (7B/14B/32B), LLaMA-3.1-8B, Qwen2.5-V。
- 对比对象:Base Model(无 Few-shot,避免 Prompt 干扰) vs. RLVR-Trained Model(如 SimpleRLZoo, Oat-Zero, DAPO 训练出的模型)。
3. 核心发现与实验结果
3.1 现象:小 k 占优,大 k 劣势
在所有测试基准中,作者观察到了一个一致的现象:
- k ≈ 1 k \approx 1 k≈1 时:RLVR 模型优于 Base 模型。这解释了为什么在常规 Leaderboard 上 RL 模型分数更高------它们极大提高了采样到正确答案的概率(Sampling Efficiency)。
- k k k 增大时 :Base 模型的曲线更陡峭,迅速追上并反超 RLVR 模型。例如在 Minerva 基准测试中,32B Base 模型在 k = 128 k=128 k=128 时比 RL 模型高出约 9%。
3.2 覆盖率分析 (Coverage Analysis)
通过对比 Base 和 RLVR 模型能解决的问题集合,研究发现:
- RLVR 模型能解决的问题几乎是 Base 模型能解决问题的子集。
- 存在大量问题是 Base 模型能解决(在多次采样中)而 RLVR 模型完全无法解决的(即便 k k k 很大)。反之,RLVR 独有解决的问题极少。
- 结论:RLVR 并没有教会模型"新"的解题能力,而是让模型更倾向于输出其原有能力范围内的某一部分正确路径,同时抑制了其他(可能包含正确解的)探索路径。
3.3 困惑度分析 (Perplexity Analysis)
为了验证 RLVR 生成的路径是否"新颖",作者计算了 Base 模型对 RLVR 生成内容的困惑度(PPL):
- RLVR 生成的回答在 Base 模型中的 PPL 分布位于较低的区间。
- 这表明 RLVR 生成的内容本质上是 Base 模型本身就大概率会生成的模式。RLVR 主要是锐化(Sharpening)了 Base 模型的先验分布,而非拓展它。
3.4 与蒸馏 (Distillation) 的对比
与 RLVR 不同,使用 DeepSeek-R1 对 Qwen 进行蒸馏训练的模型,其 pass@k 曲线在所有 k k k 值下都显著高于 Base 模型。
- 结论:蒸馏通过引入教师模型的知识,确实扩展了模型的推理边界,而当前的 RLVR 仅是在优化现有边界内的搜索策略。
4. 算法与训练动力学分析
4.1 采样效率差距 ( Δ S E \Delta_{SE} ΔSE)
作者提出了 Sampling Efficiency Gap ( Δ S E \Delta_{SE} ΔSE) 指标,定义为 RL 模型的 pass@1 与 Base 模型 pass@256(作为能力上界代理)之间的差值。
- 测评了 PPO, GRPO, Reinforce++, RLOO, ReMax, DAPO 等算法。
- 结果 :所有算法的 Δ S E \Delta_{SE} ΔSE 都很大(超过 40%),且算法间差异不本质。这说明现有 RL 算法在挖掘基座模型潜力方面远未达到最优 。
4.2 训练过程中的退化
随着 RL 训练步数的增加:
pass@1持续上升(平均性能变好)。pass@256持续下降(推理能力边界收缩)。
- 这证实了 RLVR 是通过牺牲多样性和潜在的推理路径来换取特定路径的高概率输出。
5. 结论与启示
5.1 为什么 RLVR 没有带来新能力?
作者认为主要原因在于 LLM 的动作空间(Action Space)过于庞大,且 RLVR 高度依赖 Base 模型的预训练先验(Pretrained Priors)。
- 在如此巨大的空间中,盲目探索极难获得正反馈。
- RL 算法倾向于利用 Base 模型已有的高概率路径(Exploitation),而非探索未知的、可能正确但概率较低的路径(Exploration),导致模型被"困"在基座模型的先验中。
5.2 未来方向
为了真正解锁 RL 在 LLM 上的潜力,论文建议关注以下方向:
- 高层抽象探索 (High-level Abstraction):在程序或思维链的更高层级进行探索,而非 Token 级别。
- 课程学习 (Curriculum):通过从易到难的数据构建,分层减少探索空间。
- 过程奖励 (Process Reward):引入细粒度的中间反馈,而非仅依赖最终答案的二元奖励。
- Agentic RL:引入多轮交互和环境反馈,允许模型在交互中获取新信息。
Gated Attention for Large Language Models: Non-linearity, Sparsity, and Attention-Sink-Free
1. 摘要
本研究系统地调查了在大语言模型(LLM)的 Softmax Attention 机制中引入门控(Gating) 的影响。通过在 15B MoE 模型和 1.7B Dense 模型上进行的超过 30 种变体的广泛实验(训练数据达 3.5T tokens),作者发现了一个简单但极其有效的修改方案:在 Scaled Dot-Product Attention (SDPA) 输出后应用 Head-Specific 的 Sigmoid 门控。
该机制不仅显著提升了模型性能(PPL 和下游任务),还带来了训练稳定性的提升(支持更大的学习率),并消除了"注意力汇聚(Attention Sink)"现象,从而增强了长上下文的外推能力。
2. 研究背景与动机
尽管门控机制在 LSTM、GRU、Gated Linear Attention 等架构中广泛应用,但在标准的 Softmax Attention(Transformer)中,其具体作用往往被忽略或与其他设计(如 MoE 路由、稀疏注意力)混淆 。
- 解耦需求:现有的如 Switch Heads 或 Native Sparse Attention 等工作虽然使用了门控,但未能将其效果与路由或稀疏设计剥离开来。
- 核心问题:本研究旨在通过控制变量法,探究在标准 Attention 层的不同位置引入门控的具体收益和内在机理 。
3. 方法论:门控注意力层 (Gated Attention Layer)
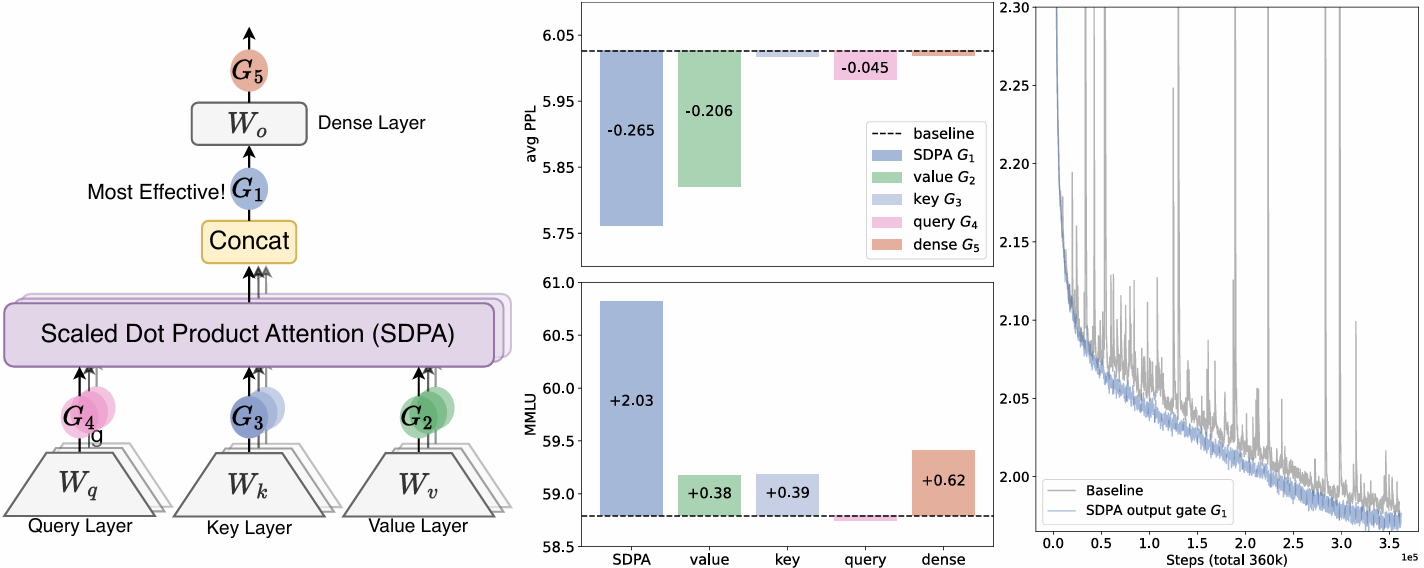
作者在标准 Multi-Head Attention 的计算流程中引入了门控操作 Y ′ = Y ⊙ σ ( X W θ ) Y' = Y \odot \sigma(X W_\theta) Y′=Y⊙σ(XWθ) 。
3.1 探索的设计空间
研究团队考察了五个维度的变体 :
- 位置 (Positions) :
- G 4 , G 3 , G 2 G_4, G_3, G_2 G4,G3,G2:分别位于 Query, Key, Value 投影之后。
- G 1 G_1 G1 (关键):位于 SDPA 输出之后(即 Softmax 归一化并加权求和后的结果)。
- G 5 G_5 G5:位于最终输出层(Dense Output)之后。
- 粒度 (Granularity):Headwise(每头一个标量) vs. Elementwise(逐元素向量)。
- 共享机制 (Sharing):Head-Specific(每头独立参数) vs. Head-Shared(跨头共享)。
- 计算方式 (Type):乘法门控 (Multiplicative) vs. 加法门控 (Additive)。
- 激活函数 (Activation):Sigmoid vs. SiLU 等。
3.2 最佳实践结论
实验表明,SDPA 输出后的逐元素门控(Elementwise Gating at SDPA Output, G 1 G_1 G1) 是最佳配置。
- 公式表示 :
O = Concat ( Head 1 , ... , Head h ) W O O = \text{Concat}(\text{Head}_1, \dots, \text{Head}_h)W_O O=Concat(Head1,...,Headh)WO
其中 Head i = Attention ( Q i , K i , V i ) ⊙ σ ( X i W θ i ) \text{Head}i = \text{Attention}(Q_i, K_i, V_i) \odot \sigma(X_i W{\theta_i}) Headi=Attention(Qi,Ki,Vi)⊙σ(XiWθi)。
4. 实验结果与性能分析
4.1 模型性能提升
- MoE 模型 (15B) :在 400B token 上训练后,应用 G 1 G_1 G1 门控使 PPL 降低了约 0.265,MMLU 提升了 2.03 分,优于单纯增加参数量(如增加 Expert 数量或 Head 数量)的基线。
- Dense 模型 (1.7B):在 3.5T token 的大规模训练中,门控带来的收益在不同学习率和 Batch Size 下保持一致。
4.2 训练稳定性 (Training Stability)
- 消除 Loss Spikes:引入门控后,训练过程中的 Loss 震荡(Spikes)几乎被消除。
- 支持更大的学习率:Baseline 模型在 8e-3 的学习率下会发散,而加了门控的模型可以稳定训练并获得更好收敛。
5. 机理分析:为什么门控有效?
论文通过深入分析,将收益归因于两个核心因素:非线性 (Non-linearity) 和 稀疏性 (Sparsity)。
5.1 非线性增强低秩映射
在标准 Attention 中,Value 投影 ( W V W_V WV) 和输出投影 ( W O W_O WO) 是连续的线性层。由于 d k < d m o d e l d_k < d_{model} dk<dmodel,这实际上构成了一个低秩线性映射。
- 发现 :在 W V W_V WV 和 W O W_O WO 之间引入非线性(即门控)可以提高表达能力。
- 证据:即使只在 SDPA 输出后加一个无参的 RMSNorm(引入非线性),PPL 也能显著下降,证明了非线性的重要性。
5.2 引入输入依赖的稀疏性 (Input-Dependent Sparsity)
- 稀疏的门控分数:实验观察到,训练后的 Sigmoid 门控值高度集中在 0 附近(均值约为 0.116),这为 Attention 输出引入了极强的稀疏性 。
- 依赖 Query 的重要性:SDPA 后的门控是基于当前 Query 的输出计算的,而 Value 后的门控是基于 Value 计算的。实验证明前者效果更好,说明根据当前 Query 动态过滤信息至关重要 。
- 消融实验:如果强行使用 Non-Sparse Sigmoid(将值域限制在 0.5, 1),性能收益会大幅下降 。
5.3 消除 Attention Sink (Attention-Sink-Free)
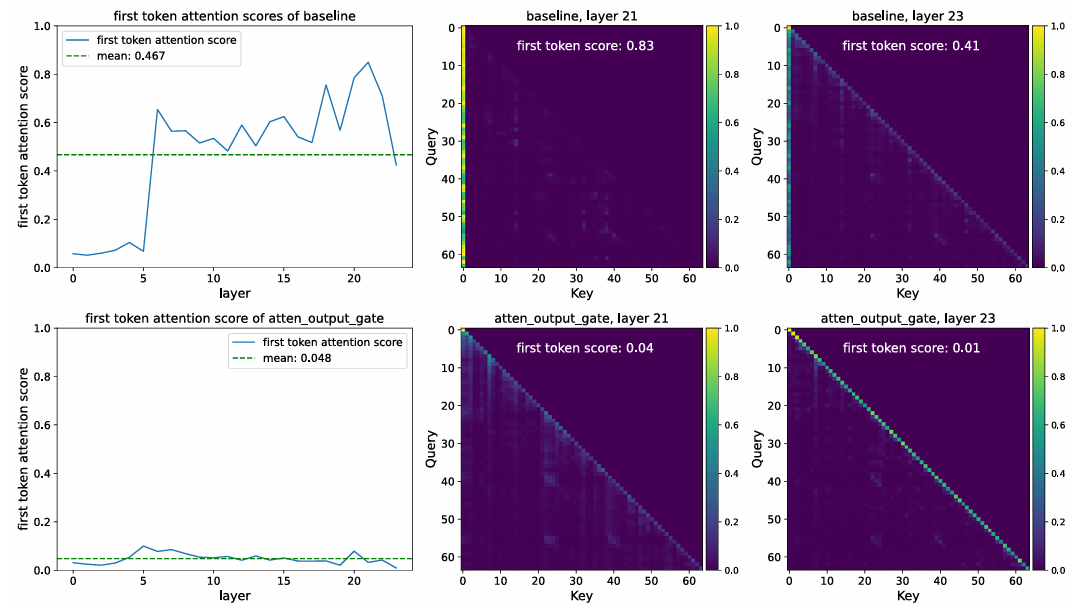
- 现象:标准 LLM 通常会将大量注意力分数分配给第一个 Token(Attention Sink),即便它没有语义意义 。
- 门控的作用:引入 SDPA 门控后,模型能够通过门控值"关掉"无关信息的流动。实验显示,加了门控的模型,首个 Token 的注意力占比从 46.7% 降至 4.8% 。
- 长上下文外推:由于消除了 Attention Sink,模型在通过 YaRN 进行上下文扩展(从 32k 扩展到 128k)时,表现显著优于 Baseline(RULER 基准测试提升 10+ 分) 。
6. 结论
本论文通过严谨的实证研究证明,在 Attention 机制中(特别是 SDPA 输出位置)引入简单的 Sigmoid 门控,是一种低成本、高收益的架构改进。它通过引入非线性和输入依赖的稀疏性,解决了低秩瓶颈和 Attention Sink 问题,显著提升了 LLM 的训练稳定性与长文本能力。
下一步建议:
如果您正在训练或微调 LLM,可以尝试在 Attention 层引入该门控机制,特别是在追求长上下文能力或遇到训练 Loss 震荡时。