文章简介
HOG+SVM是行人检测领域的经典算法,自2005年Dalal提出以来,一直是工业界和学术界的重要基线方法。本文将从算法原理 、环境配置 、数据集使用 、模型优化四大维度,全面解析HOG+SVM的实践路径,同时覆盖红外行人检测的扩展应用,帮助读者从理论到工程实现掌握这一技术。
1. 行人检测算法研究综述
行人检测的核心任务是在图像或视频帧中定位所有行人并标注其边界框,这一任务面临四大挑战:
- 行人外观因服饰、姿态、年龄差异极大;
- 遮挡问题频繁(如人群中的部分遮挡);
- 复杂背景(树木、建筑、车辆)易干扰检测;
- 实时应用对检测速度的严格要求。
当前行人检测算法主要分为三大方向:
(1)基于运动检测的算法
通过背景建模提取前景运动目标,再用分类器判断是否为行人。缺点明显:仅能检测运动目标,受光照、阴影影响大,无法处理多目标粘连。
(2)基于机器学习的方法(主流)
采用人工特征+分类器 的框架,核心是手工设计区分性特征(如HOG、LBP),再用分类器(SVM、AdaBoost)区分行人和背景。其中,HOG+SVM是里程碑式成果,后续衍生出HOG+Adaboost、ICF+AdaBoost等优化算法。
(3)基于深度学习的方法
以Faster-RCNN、SSD、YOLO为代表,通过神经网络自动学习特征,精度显著高于传统方法,但部分场景(如实时检测)可能因计算量过大不满足需求。
2. 基于机器学习的行人检测方法
2.1 HOG+SVM:经典 baseline
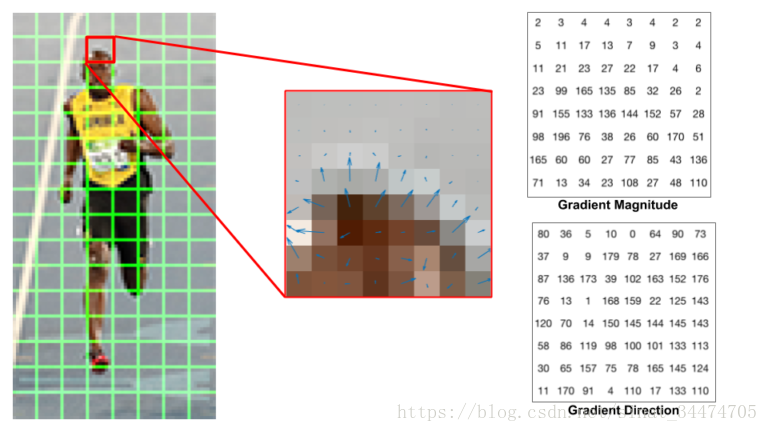
HOG(梯度方向直方图)是行人检测的"黄金特征",它通过梯度方向分布描述行人形状,对光照变化和小范围平移不敏感。具体步骤:
- 图像切片:将图像裁剪为固定长宽比(如1:2)的切片(如64×128像素);
- Cell划分:将切片划分为8×8的Cell(最小特征单元);
- 梯度计算:计算每个像素的梯度方向(0-180°,无符号梯度效果更好)和强度;
- 直方图统计:每个Cell内统计9个bin的梯度方向直方图(覆盖0-180°,每20°一个bin);
- Block归一化:将4个Cell组成16×16的Block,对Block内的直方图进行L2归一化(减少光照影响);
- 特征拼接 :将所有Block的直方图拼接成最终特征向量(64×128图像的特征维度为 7×15×36=37807×15×36=37807×15×36=3780)。
分类器选择线性SVM ,原因是非线性核(如RBF)的预测时间与支持向量数量成正比 ,无法满足实时需求。线性SVM追求最大间隔分类边界 ,训练得到的参数 www 和 bbb 定义了分类规则:
- 若 (wTx+b>1)(w^Tx + b > 1)(wTx+b>1),则为行人(正样本);
- 若 (wTx+b<−1)(w^Tx + b < -1)(wTx+b<−1),则为背景(负样本)。
OpenCV中内置了HOG+SVM的实现,通过滑动窗口扫描图像,缩放图像以检测不同大小的行人。
2.2 HOG+Adaboost:速度优化
HOG+SVM的瓶颈是计算速度(滑动窗口遍历全图)。HOG+Adaboost参考人脸检测的级联分类器思想,将多个弱分类器级联:
- 前几级分类器快速排除背景窗口(如天空、地面);
- 后几级分类器精细化判别候选区域。
这种方法将检测速度提升至HOG+SVM的10倍,适合实时场景。
2.3 ICF+AdaBoost:多特征融合
HOG仅关注边缘形状,对表观信息(如颜色)利用不足。ICF(积分通道特征)解决了这一问题,它整合了10个通道的信息:
- 6个方向的梯度直方图;
- 3个LUV颜色通道;
- 1个梯度幅值通道。
ICF通过积分图 快速计算通道特征,结合soft cascade级联分类器,训练多个典型尺度分类器(无需缩放图像),精度和速度均优于HOG+SVM。
2.4 DPM+latent SVM:遮挡问题解决
行人检测的一大难题是遮挡(如人群中的半遮挡)。DPM(可变形部件模型)将行人分解为头肩、躯干、四肢等部件,分别检测后组合结果:
- 根模型(Root-Filter):定位行人潜在区域;
- 部分模型(Part-Filter):检测各部件位置,验证是否为行人。
DPM结合latent SVM分类器,显著提升了遮挡场景的检测精度,但特征计算复杂,速度较慢。
3. HOG+SVM环境配置与实现
3.1 数据集:INRIADATA
INRIADATA是HOG+SVM的"原生数据集",由Dalal构建,包含:
- normalized_images:归一化后的行人图像(128×64像素);
- original_images:原始图像(含标注文件,需自行裁剪行人区域)。
3.2 算法原理与代码实现
3.2.1 HOG特征提取
以64×128图像为例,HOG特征维度计算:
- Cell大小:8×8 → 64×128图像含 8×168×168×16 个Cell;
- Block大小:16×16(4个Cell) → 含 7×157×157×15 个Block;
- 每个Block特征:4个Cell×9个bin = 36维;
- 总特征维度:7×15×36=37807×15×36=37807×15×36=3780。
3.2.2 线性SVM训练
线性SVM的目标是最大化分类间隔 ,数学建模为:minw,b12∥w∥2s.t.yi(wTxi+b)≥1 \min_{w,b} \frac{1}{2}\|w\|^2 \quad \text{s.t.} \quad y_i(w^Tx_i + b) \geq 1 w,bmin21∥w∥2s.t.yi(wTxi+b)≥1其中,yi∈{+1,−1}y_i \in \{+1,-1\}yi∈{+1,−1} 是样本标签(+1为正,-1为负)。
Matlab中使用libsvm训练的代码示例:
matlab
% 训练线性SVM模型
model = svmTrain(X, y, C, @linearKernel, 1e-3, 20);
% 可视化决策边界
function visualizeBoundaryLinear(X, y, model)
w = model.w;
b = model.b;
xp = linspace(min(X(:,1)), max(X(:,1)), 100);
yp = - (w(1)*xp + b)/w(2);
plotData(X, y);
hold on;
plot(xp, yp, '-b');
hold off
end3.3 代码资源
- Matlab实现:https://github.com/jmrf/HOG-Pedestrian-Detector(需安装libsvm);
- OpenCV实现:https://github.com/icsfy/Pedestrian_Detection(支持HOG+SVM和HOG+Cascade)。
获取更多资料
欢迎下载学习资料,包含:机器学习,深度学习,大模型,CV方向,NLP方向,kaggle大赛,实战项目、自动驾驶等。
"点击" 免费获取 。