针对无人机在三维动态环境下路径规划存在的实时性差、避障精度低、路径平滑性不足等问题,提出一种青蒿素优化算法(Artemisinin Optimization Algorithm, AOA)与动态窗口法(Dynamic Window Approach, DWA)混合的路径规划方法。首先,利用青蒿素优化算法完成全局路径的离线规划;其次,结合动态窗口法进行局部动态避障的在线优化,利用无人机运动学约束筛选速度窗口,保证路径的实时性和安全性;最后,通过三维动态仿真环境验证算法性能。实验结果表明,混合算法在动态障碍物场景下,具备更优的路径长度、避障成功率和实时响应速度,满足无人机三维动态环境下的路径规划需求。
一、引言
无人机在物流配送、电力巡检、应急救援等领域的应用日益广泛,其作业环境逐渐从结构化静态场景向非结构化动态场景拓展。三维动态避障路径规划作为无人机自主导航的核心技术,需要同时满足全局最优性 、局部实时性 和运动安全性三大要求。
传统路径规划方法可分为全局规划和局部规划两类。全局规划方法如A*算法、Dijkstra算法、粒子群算法等,能够生成全局最优路径,但对动态障碍物的响应能力不足;局部规划方法如动态窗口法、人工势场法等,具备较强的实时避障能力,但易出现局部最优或路径震荡问题。因此,将全局规划与局部规划相结合,成为解决三维动态避障问题的主流思路。
动态窗口法基于无人机运动学模型筛选可行速度集,能够快速响应动态障碍物,但缺乏全局路径引导,易导致路径偏离目标。基于此,本文提出AO-DWA混合算法,通过全局路径引导局部避障,实现无人机在三维动态环境下的高效路径规划。
二、相关基础理论
2.1 无人机三维运动学模型
为简化分析,将无人机视为质点,其在三维空间中的运动状态可由位置坐标 (x,y,z)(x,y,z)(x,y,z)

2.2 青蒿素优化算法原理
青蒿素优化算法原文链接:https://blog.csdn.net/weixin_46204734/article/details/142897235
1 Yuan C , Zhao D , Heidari A A ,et al.Artemisinin optimization based on malaria therapy: Algorithm and applications to medical image segmentationJ.Displays, 2024, 84.DOI:10.1016/j.displa.2024.102740.
2.3 动态窗口法原理
动态窗口法的核心思想是在速度空间中搜索最优速度向量,其核心步骤包括:
- 速度窗口采样 :根据无人机运动学约束,生成可行速度集 VsampleV_{sample}Vsample;
- 轨迹预测:对每个采样速度,预测未来一段时间内的无人机轨迹;
- 评价函数计算:通过评价函数评估每条预测轨迹的优劣,筛选出最优轨迹对应的速度;
- 速度更新:将最优速度作为无人机的当前运动速度,完成局部路径规划。
评价函数包含目标趋近度 、避障安全性 和速度平滑性 三个指标,其表达式为:
G(v,ω)=α⋅heading(v,ω)+β⋅dist(v,ω)+γ⋅velocity(v,ω)G(v,\omega)=\alpha \cdot heading(v,\omega)+\beta \cdot dist(v,\omega)+\gamma \cdot velocity(v,\omega)G(v,ω)=α⋅heading(v,ω)+β⋅dist(v,ω)+γ⋅velocity(v,ω)
其中,α,β,γ\alpha,\beta,\gammaα,β,γ 为权重系数,headingheadingheading 表示轨迹与目标方向的夹角,distdistdist 表示轨迹与障碍物的最小距离,velocityvelocityvelocity 表示轨迹的速度大小。
2.4 混合算法的整体流程
AOA-DWA混合算法的整体流程如下:
- 环境建模:构建三维空间环境模型,输入无人机起点、终点坐标,以及静态障碍物和动态障碍物的初始位置与运动参数;
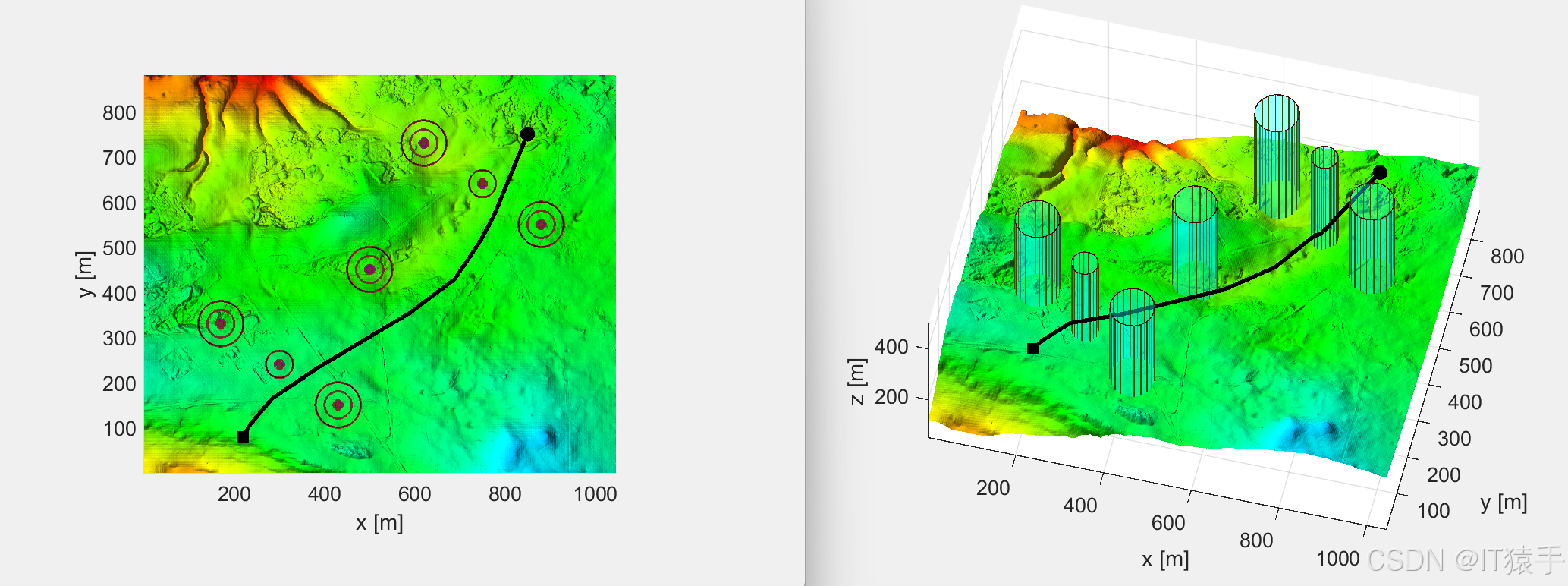
- 全局路径规划 :利用青蒿素优化算法生成避开静态障碍物的全局路径,并将路径节点存储为引导点序列;
- 无人机状态感知:无人机通过传感器实时获取自身位置、速度信息,以及动态障碍物的实时位置;
- 局部动态避障 :以全局路径为引导,采用动态窗口法生成局部避障路径,驱动无人机运动;
- 路径更新与终止判断:无人机每运动一个步长,重复步骤3-4,直至到达终点。
三、仿真实验与MATLAB代码
bash
clc;
clear;
close all;
global model
% Number of runs
model = CreateModel(); % Create search map and parameters
CostFunction=@(x) MyCost(x); % Cost Function
nVar=model.n; % Number of Decision Variables = searching dimension of ACO = number of path nodes
VarSize=[1 nVar]; % Size of Decision Variables Matrix
%% 算法求解
[Fgbest,Xgbest,BestCost,Kk] = AO(pop,M,lb,ub,dim,CostFunction);
%% Plot results
% Best solution
BestPosition = SphericalToCart1(Xgbest);
disp("Best solution...");
BestPosition;
smooth = 0.95;
PlotSolution(BestPosition,model,smooth);
% Best cost
figure;
plot(BestCost,'LineWidth',2);
xlabel('Iteration');
ylabel('Best Cost');
grid on;
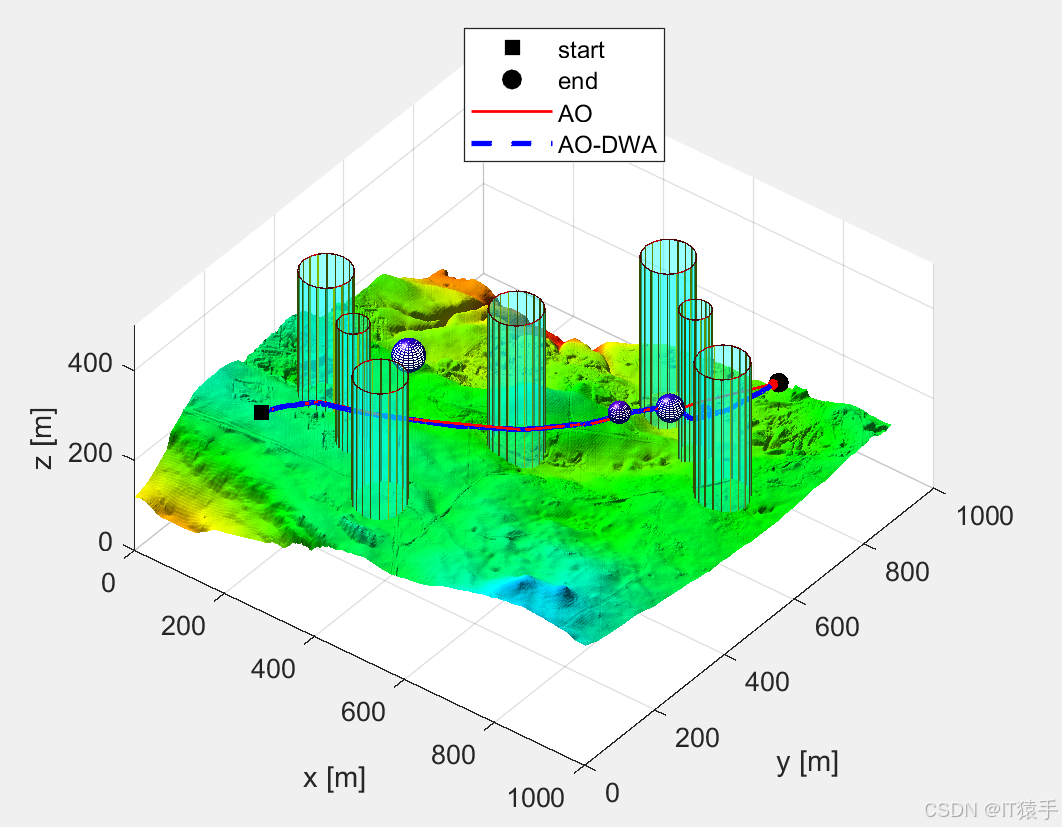
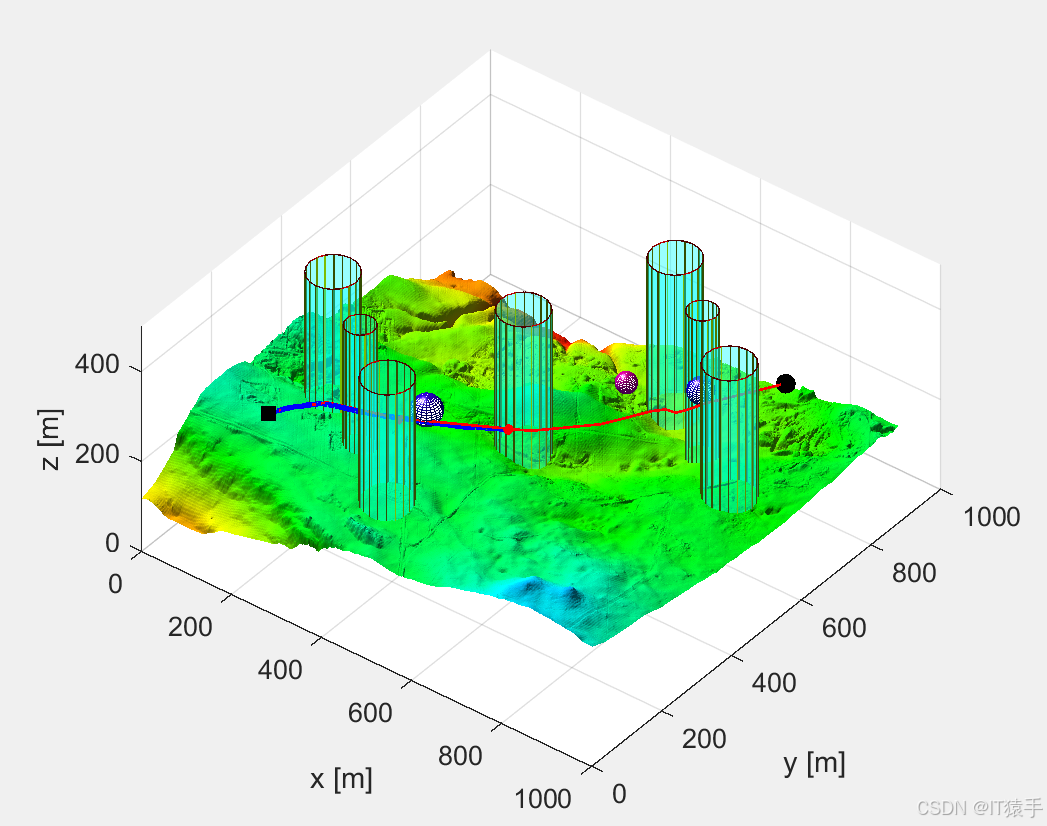
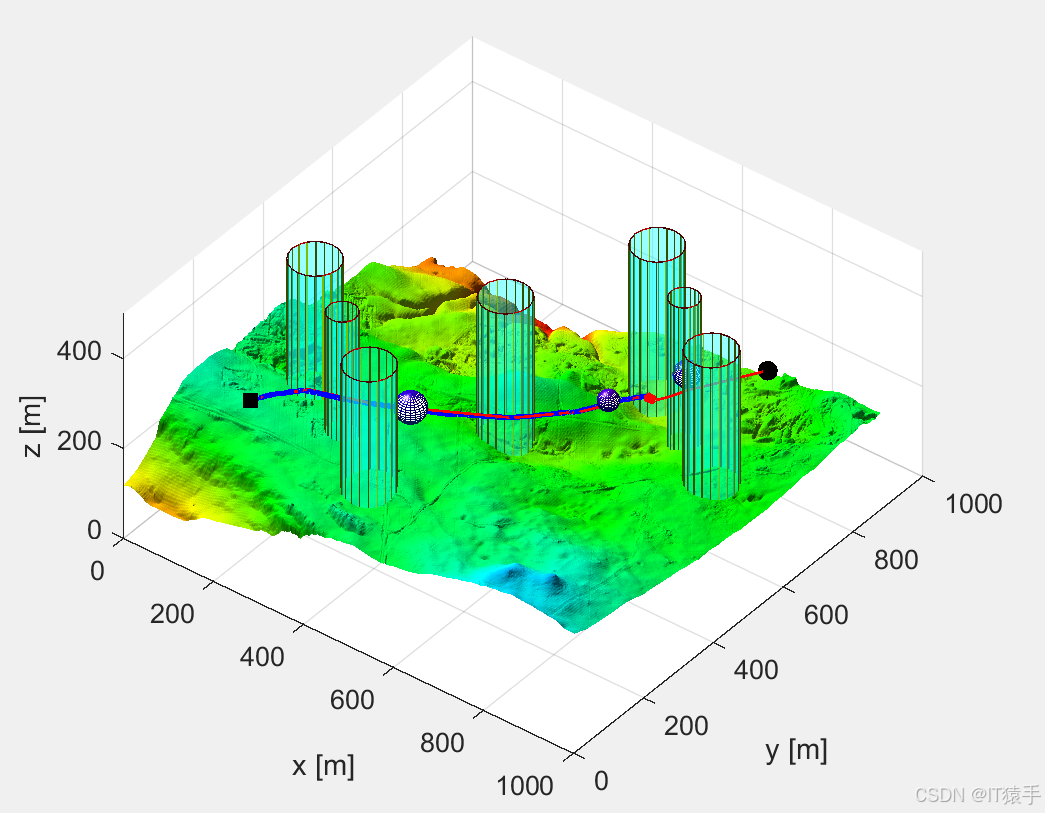
save data.mat青蒿素优化算法生成避开静态障碍物的全局路径:
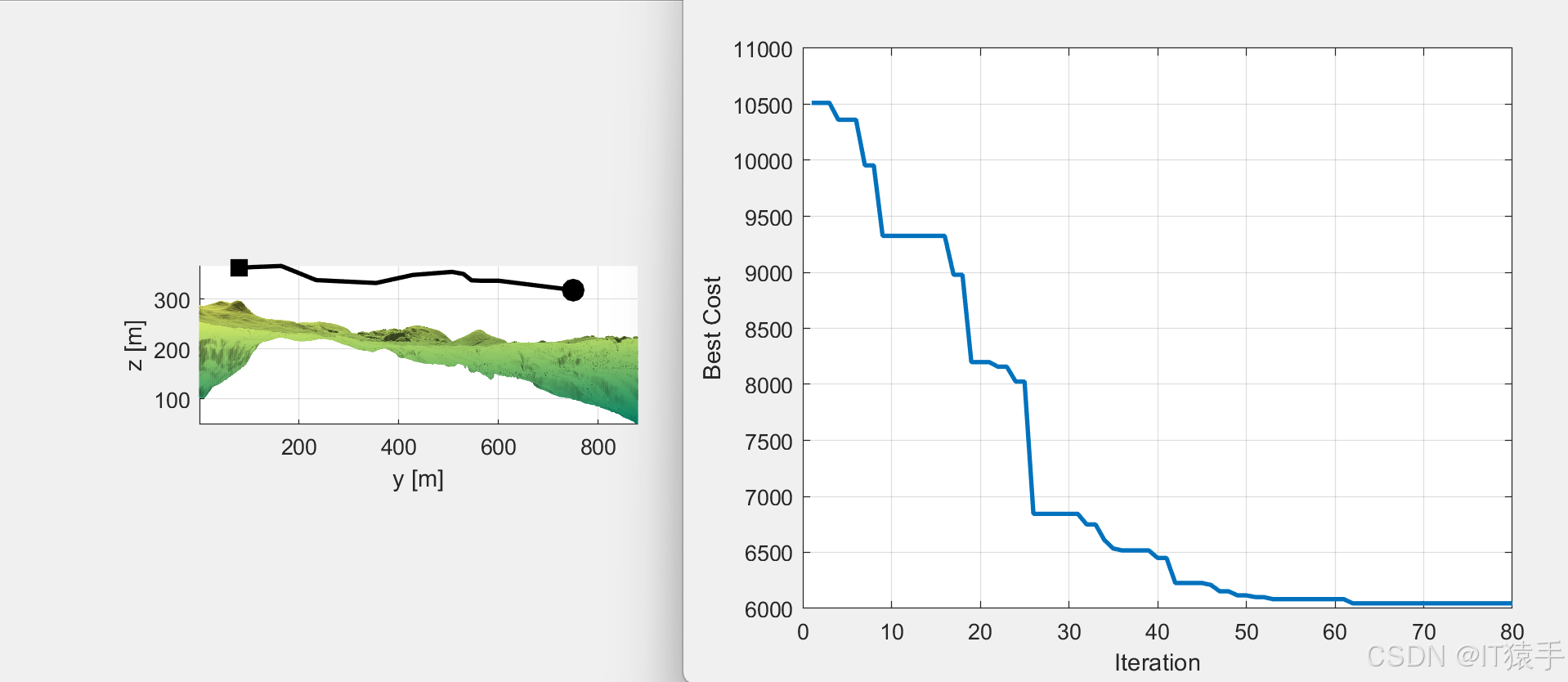
以AO全局路径为引导,动态窗口法生成局部避障路径: