在第六届中国机器人行业年会上,PNP机器人凭借在力控技术与遥操作领域的深度创新及行业赋能成果,成功斩获"科技贡献奖",以硬核实力赢得行业广泛认可。此次盛会中,PNP同步携三大核心技术方案重磅亮相,全方位展现其在人机协作与遥操作领域的科研积累与场景落地能力。
作为Haply中国区域负责方,PNP展出的Inverse3力反馈遥操作方案备受瞩目。该方案深度融合Haply国际顶尖力控技术与PNP本地化适配经验,实现微米级操作精度与真实力感反馈,低延迟传输特性完美解决医疗微创、精密电子制造等场景的远程精细作业痛点,让操作人员如同亲临现场般精准控制。
同步亮相的灵巧手VR捕捉方案,通过高精度数据手套与VR交互技术的深度协同,达成亚毫米级手指关节动作捕捉与5ms低延迟映射。方案集成视觉-力觉多模态融合算法,可实时复现抓取、捏取等复杂精细动作,同步反馈物体材质硬度与受力触感,广泛适配高危作业、医疗培训、精密装配等多元场景,打破传统操作的空间限制。
此外,Diana7遥操作方案的展出进一步丰富了产品矩阵。该方案聚焦工业级复杂场景需求,凭借稳定可靠的操控性能与强环境适应性,可适配重型装备操控、仓储物流分拣等场景,通过模块化设计满足不同行业的定制化需求,展现了PNP从轻型精密操作到重型工业应用的全场景覆盖能力。
从底层算法创新到全场景方案落地,PNP机器人以"科技赋能产业"为核心,此次获奖与系列方案的成功展出,既是对其科研实力的高度肯定,也彰显了中国机器人企业在核心技术领域的突破与引领作用,为行业高质量发展注入强劲动力。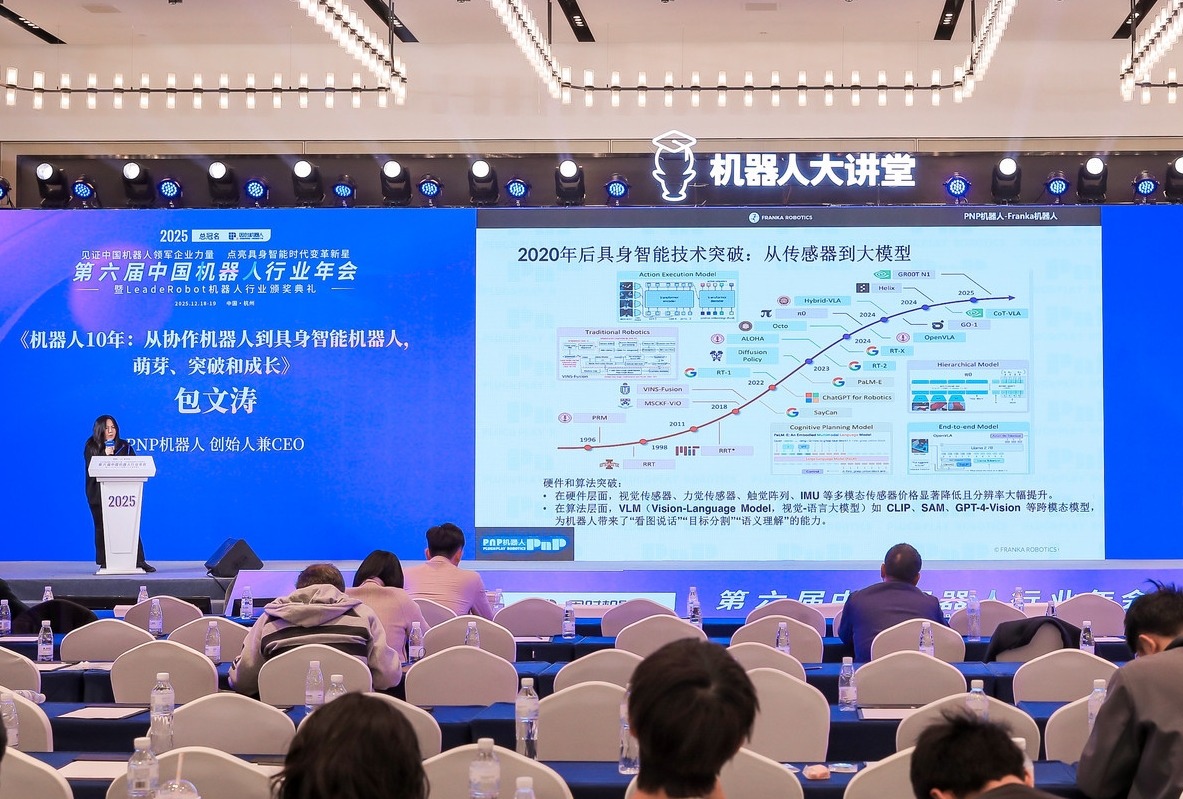
活动现场,PNP创始人包文涛结合自身长期深耕机器人行业的实践经验,发表了题为"机器人10年:从协作机器人到具身智能的萌芽、发展与突破"的主题演讲。他回顾了协作机器人从实验室走向工业场景,以安全性、灵活性打破传统机器人应用边界的萌芽阶段,复盘了技术迭代中力控、感知等核心能力的持续突破,更聚焦当下具身智能与AI大模型深度融合的行业变革,指出机器人正从"精准执行工具"向"自主感知决策的智能体"进化,为现场观众勾勒出技术与产业协同发展的清晰脉络,引发行业广泛共鸣。
