Unity 无人机物理模拟开发日志:从零打造穿越机手感
摘要:本文记录了在 Unity 中构建一个高拟真 FPV 穿越机(Drone)物理模拟系统的过程。从基础的 PID 控制到引入空气动力学阻力、地面效应和电机惯性,一步步逼近真实的飞行手感。
环境:Unity 2022.3.57c1f1 Window10

开源仓库地址
演示视频:
一、功能介绍
输入系统
最初的实现使用键盘鼠标控制,但这对于模拟穿越机来说完全不够。真实的穿越机需要细腻的模拟量输入。

核心物理引擎
Unity 的 Rigidbody 提供了基础物理,但要飞得像穿越机,必须手动计算力和力矩。
PID 控制器 (Rate Loop)
这是飞控的灵魂。我们实现了三个独立的 PID 控制器分别控制 Pitch、Roll 和 Yaw 的角速度 。
PID 的介绍请看我的另外一篇文档: PID算法
- 目标:摇杆输入 = 目标角速度(例如满杆 200度/秒)。
- 反馈 :
rb.angularVelocity。 - 输出:PID 计算出的修正力矩。
混控器 (Mixer)
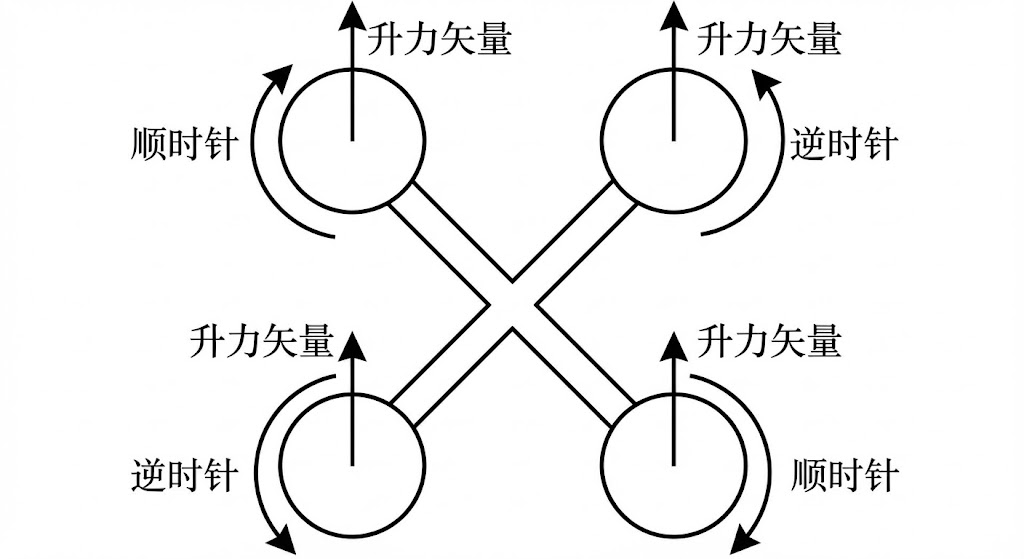
将 PID 输出分配到四个电机。采用标准的 Quad X 布局:
csharp
// FL (左前): +Pitch +Roll -Yaw
// FR (右前): +Pitch -Roll +Yaw
// BL (左后): -Pitch +Roll +Yaw
// BR (右后): -Pitch -Roll -Yaw物理细节的打磨
基础 PID 能飞,但手感像"在真空中飞行"或者"完美的刚体"。为了真实感,我引入了三个关键特性:
电机惯性 (Motor Inertia)
真实的电机从 0 加速到 100% 需要时间。
- 实现 :使用
Mathf.Lerp对油门输入进行低通滤波。 - 效果:消除了"瞬移般"的响应,给油门带来了一丝"肉"感和延迟,极大提升了重量感。
csharp
// 更新动力 (在 FlightController 的 FixedUpdate 中调用)
public void UpdatePhysics(float targetThrottle)
{
// 模拟电机惯性 (一阶低通滤波)
// 从当前油门平滑过渡到目标油门
float dt = Time.fixedDeltaTime;
currentThrottle = Mathf.Lerp(currentThrottle, targetThrottle, dt * motorResponseSpeed);
// 1. 施加升力 (垂直于机臂向上)
Vector3 force = transform.up * (currentThrottle * maxThrust);
rb.AddForceAtPosition(force, transform.position);
// 2. 施加反扭矩 (Yaw控制)
// 顺时针旋转的电机,会给机身施加逆时针的扭矩,反之亦然
float torqueDir = isClockwise ? -1f : 1f;
float torqueMagnitude = currentThrottle * maxThrust * torqueFactor * torqueDir;
rb.AddTorque(transform.up * torqueMagnitude, ForceMode.Force);
}地面效应 (Ground Effect)
当无人机贴近地面时,下洗气流受阻,升力会增加。
- 实现:向下发射射线检测高度。高度 < 0.5m 时,根据距离非线性增加升力系数。
- 效果:降落时会有明显的"气垫感",不会直接"砸"向地面,起飞也更轻盈。
csharp
// --- 地面效应 (Ground Effect) ---
RaycastHit hit;
if (Physics.Raycast(transform.position, Vector3.down, out hit, groundEffectMaxHeight))
{
float ratio = 1.0f - (hit.distance / groundEffectMaxHeight);
float groundEffectMultiplier = 1.0f + (ratio * groundEffectLiftFactor);
m1 *= groundEffectMultiplier;
m2 *= groundEffectMultiplier;
m3 *= groundEffectMultiplier;
m4 *= groundEffectMultiplier;
}非线性空气阻力 (Quadratic Drag)
Unity 默认的 Drag 是线性的 ( F ∝ v F \propto v F∝v),这让无人机感觉像在水里游。
- 实现 :手动计算平方阻力 F = − v ⋅ ∣ v ∣ ⋅ k F = -v \cdot |v| \cdot k F=−v⋅∣v∣⋅k。
- 差异化阻力 :
- 垂直方向:机身扁平,阻力系数大 (1.0)。下落会有明显的终端速度。
- 水平方向:机身流线,阻力系数小 (0.2)。允许长距离惯性滑行。
- 效果:这是手感提升最明显的一步。前飞松杆后的滑行感,以及高空下落时的速度平衡,都非常接近真机。
csharp
// 计算平方阻力: F = -v * |v| * dragFactor
Vector3 dragForceLocal = Vector3.zero;
dragForceLocal.x = -localVel.x * Mathf.Abs(localVel.x) * dragFactors.x;
dragForceLocal.y = -localVel.y * Mathf.Abs(localVel.y) * dragFactors.y; // 垂直阻力通常较大
dragForceLocal.z = -localVel.z * Mathf.Abs(localVel.z) * dragFactors.z;飞行模式
无人机操作一共配置了两种模式
Acro Mode (手动模式)
- 逻辑 :摇杆控制角速度。松杆后无人机保持当前姿态。
Angle Mode (自稳模式)
- 逻辑 :双环 PID 控制 。
- 外环 :摇杆控制角度 (例如满杆 45 度)。计算出目标角速度。
- 内环:执行目标角速度。
- 特性:松杆自动回平。
csharp
if (mode == FlightMode.Angle)
{
// --- Angle Mode (自稳模式) ---
// 摇杆输入映射为目标角度 (-45 ~ 45 度)
float targetPitchAngle = input.Pitch * maxTiltAngle;
float targetRollAngle = -input.Roll * maxTiltAngle; // Unity Z轴旋转方向可能需要反转
// 获取当前角度 (将 0-360 转换为 +/- 180)
Vector3 currentEuler = transform.localEulerAngles;
float currentPitch = Mathf.DeltaAngle(0, currentEuler.x);
float currentRoll = Mathf.DeltaAngle(0, currentEuler.z);
// 外环 P 控制: 角度误差 -> 目标角速度
// Pitch: 目标 - 当前 (因为后面混控器 Pitch 反转了,所以这里保持 目标-当前)
targetPitchRate = (targetPitchAngle - currentPitch) * angleKP;
// Roll: 当前 - 目标 (反转逻辑,防止正反馈翻滚)
// 右滚是负角度,如果不反转,误差为正,导致继续右滚
targetRollRate = (currentRoll - targetRollAngle) * angleKP;
// Yaw 轴通常保持 Rate 模式
targetYawRate = input.Yaw * 150f;
}
else
{
// --- Acro Mode (特技/手动模式) ---
// 摇杆输入直接映射为目标角速度 (-200 ~ 200 度/秒)
targetPitchRate = input.Pitch * 200f;
targetRollRate = input.Roll * 200f;
targetYawRate = input.Yaw * 150f;
}稳定性与体验优化
除了核心物理,还有很多细节决定了模拟器的可用性:
- 怠速保护 (Idle Protection) :
- 问题:地面待机时,PID 积分项累积导致无人机"抽搐"或乱跳。
- 解决:油门 < 5% 时,强制关闭电机并 Reset PID。
csharp
// --- 怠速保护逻辑 ---
if (throttleBase < 0.05f)
{
m1 = m2 = m3 = m4 = 0f;
pitchPID.Reset();
rollPID.Reset();
yawPID.Reset();
}- PID 限幅 (Authority Limit) :
- 限制 PID 对电机的最大控制权 (例如 30%),防止极端情况下 PID 输出过大导致电机饱和甚至侧翻。
csharp
// --- PID 限幅保护 ---
float pOut = Mathf.Clamp(pitchCorrection * correctionScale, -maxPIDAuthority, maxPIDAuthority);
float rOut = Mathf.Clamp(rollCorrection * correctionScale, -maxPIDAuthority, maxPIDAuthority);
float yOut = Mathf.Clamp(yawCorrection * correctionScale, -maxPIDAuthority, maxPIDAuthority); - 一键重置 :
- 添加手柄 Y 键 复位功能,炸机后瞬间回到原点并清空物理速度,方便反复练习。
二、源码
代码结构
代码结构比较简单,一共就4个代码就实现了整个无人机模拟,以下是流程图:
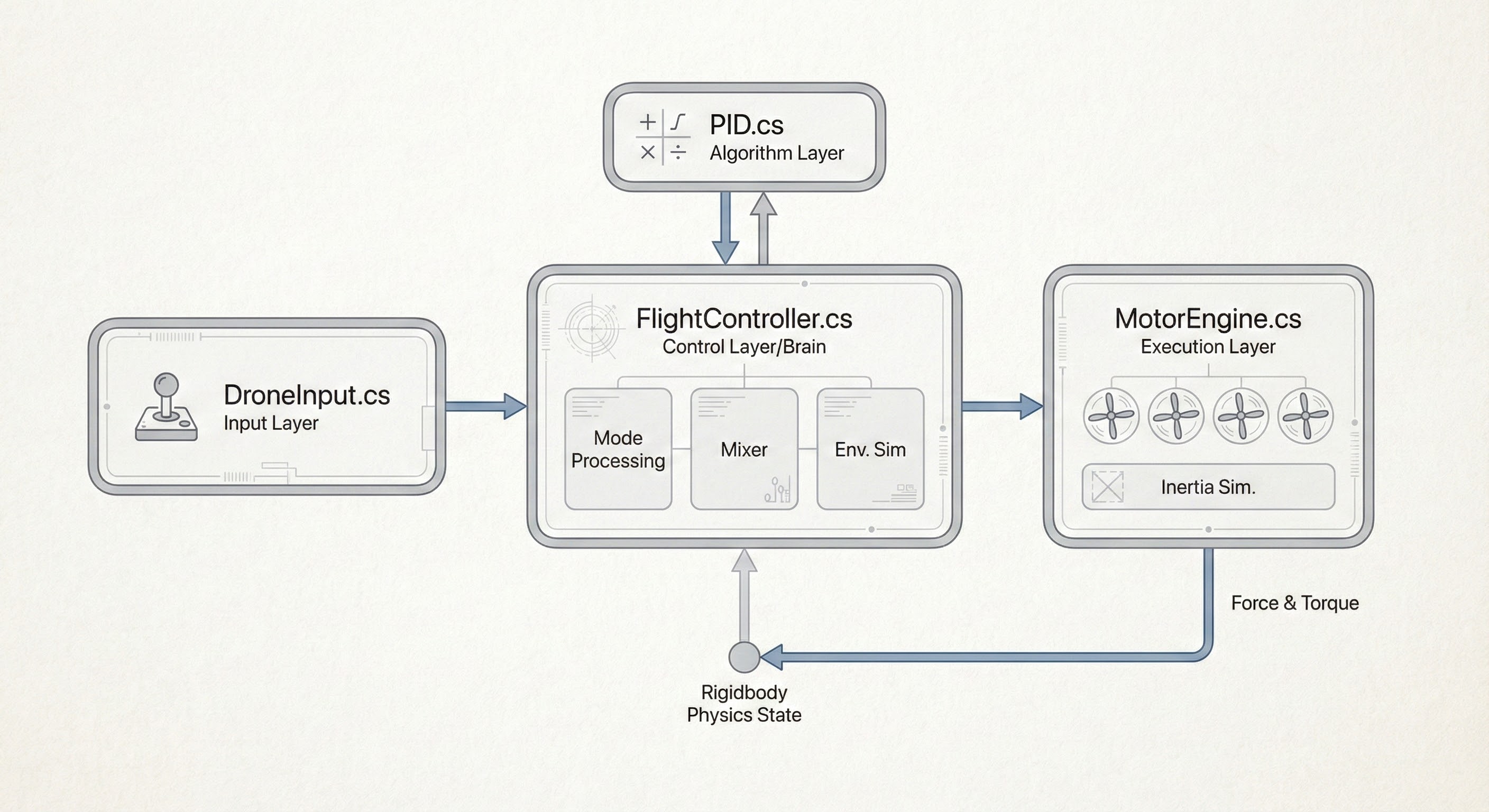
| 架构分层 | 核心脚本 | 角色定位 | 主要功能与逻辑 | 数据流向 / 物理作用 |
|---|---|---|---|---|
| 输入层 | DroneInput.cs |
信号预处理 | 1. 读取硬件 :接收物理手柄输入。 2. 数据清洗:处理摇杆死区、应用映射曲线。 | 输出 :标准化控制信号 • 油门 (Throttle): 0 ~ 1 •俯仰/横滚/偏航: -1 ~ 1 |
| 控制层 | FlightController.cs |
大脑 (Brain) | 1. 模式处理 :根据 Angle/Acro 模式将输入转为目标角速度。 2. PID 调度 :调用 PID.cs 计算误差。 3. 混控 (Mixer) :混合主油门与 PID 修正值。 4. 环境模拟:计算非线性阻力与地面效应。 |
输入 :标准化信号 + 刚体物理状态 输出:4 个电机的最终目标油门 |
| 算法层 | PID.cs |
纯数学计算 | 1. 误差计算 :对比目标值与当前值。 2. 修正输出:计算比例§+积分(I)+微分(D)的总和。 | 输入 :目标值、当前值、时间差 (dt) 输出:PID 修正值 |
| 执行层 | MotorEngine.cs |
四肢 (Limbs) | 1. 惯性模拟 :通过低通滤波模拟电机响应延迟。 2. 物理交互:将油门值转换为具体的物理力。 | 输入 :目标油门值 作用 :向 Rigidbody 施加 • 推力 (Force) • 反扭矩 (Torque) |
总结
通过以上步骤,我们从一个简单的刚体运动,进化到了一个具备空气动力学特性的飞行模拟器。目前的物理手感已经能传达出穿越机的"惯性"和"风阻"。
如果能帮助到你!可以给我来个点赞吗? 谢谢!u😘