基于维纳滤波的GNSS多频信号处理方法,以BDS为例,用于提高定位精度。通过多频信号(B1L和B3L频段),结合电离层延迟的影响。维纳滤波+加权融合的方式,进一步提升定位精度。带性能评估和可视化
原创程序,禁止翻卖
文章目录
程序简介
代码的核心功能:
- 参数设置
- 设定了GNSS的频率( B 1 L B1L B1L和 B 3 L B3L B3L频段),仿真参数(如采样间隔、总时长等)以及真实轨迹的生成(通过正弦和余弦函数模拟了三维位置变化)。
- 含噪声的GNSS观测值生成
- 模拟了含有噪声的GNSS观测值,其中噪声包括伪距测量噪声和电离层延迟噪声。
- 对B1L和B3L频段,分别生成了噪声信号并通过频率相关的电离层延迟来调整观测值。
- 维纳滤波器设计
- 使用自相关函数来估计信号和噪声的功率谱密度。
- 通过对B1L和B3L频段信号的自相关计算,得到了噪声功率,并设计了维纳滤波器的频域传递函数H(f)
- 维纳滤波的应用
- 对B1L和B3L频段的观测信号分别应用了维纳滤波器。在频域中对观测信号进行傅里叶变换后,使用维纳滤波器的传递函数滤波,再通过反变换得到滤波后的信号。
- 双频信号加权融合
- 通过加权融合的方式结合了B1L和B3L频段的滤波结果。加权系数基于噪声的方差计算,可提高位置估计的精度。
- 性能评估
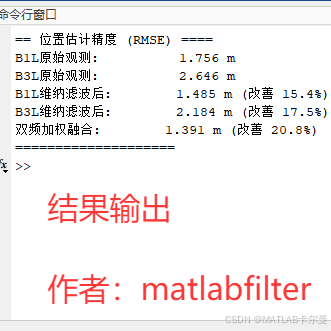
- 计算了不同滤波阶段的均方根误差( R M S E RMSE RMSE),并比较了原始观测值、维纳滤波后的单频信号和双频加权融合的效果。
- 输出了每种方法的误差改善百分比,显示了双频加权融合在提高定位精度方面的优势。
运行结果
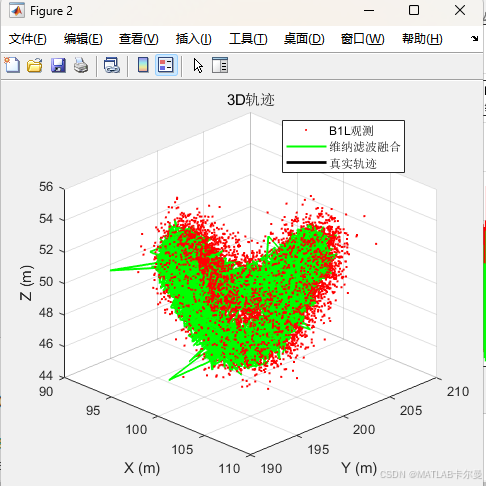
滤波前后的轨迹对比:
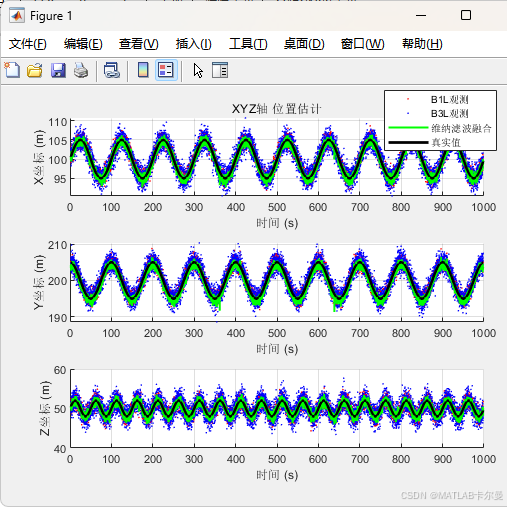
XYZ三轴位置曲线:
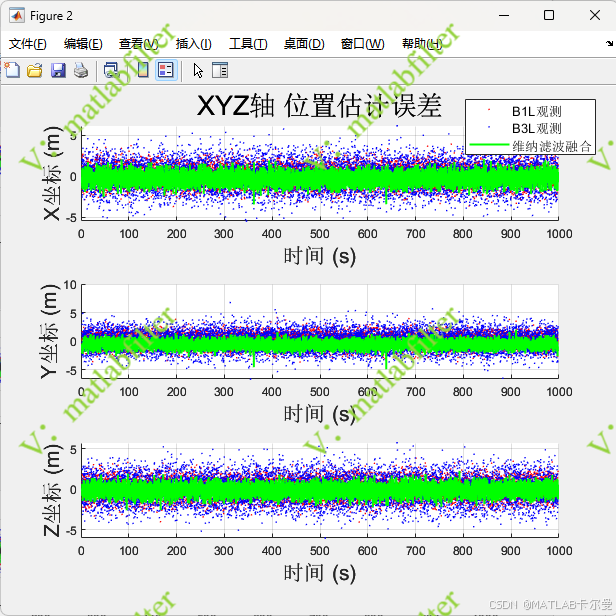
误差:
MATLAB源代码
部分代码如下:
matlab
% 多频GNSS系统维纳滤波位置估计
% 模拟BDS B1L/B3L双频信号处理
% 作者:matlabfilter(V同号,可接代码定制、讲解与调试)
% 2025-12-21/Ver1
% 2025-12-21/Ver2:首尾误差较大,仅保留中间信号
clear; clc; close all;
rng(0);
%% 参数设置
% GNSS频率设置
f_B1L = 1561.098e6; % B1L频率 (Hz)
f_3L = 1268.520e6; % B3L频率 (Hz)
% 仿真参数
dt = 0.1; % 采样间隔 (s)
T = 1000; % 总时长 (s)
t = dt:dt:T; % 时间向量
N = length(t); % 采样点数
% 真实轨迹 (3D位置)
true_pos = zeros(3, N);
true_pos(1,:) = 100 + 5*sin(2*pi*0.01*t); % X坐标 (m)
true_pos(2,:) = 200 + 5*cos(2*pi*0.01*t); % Y坐标 (m)
true_pos(3,:) = 50 + 2*sin(2*pi*0.02*t); % Z坐标 (m)
%% 生成含噪声的GNSS观测值
% 噪声参数
sigma_B1L = 1.0; % B1L伪距测量噪声标准差 (m)
sigma_B3L = 1.5; % B3L伪距测量噪声标准差 (m)
sigma_iono_B1L = 0.2; % B1L电离层延迟标准差 (m)
sigma_iono_B3L = sigma_iono_B1L * (f_B1L/f_3L)^2; % B3L电离层延迟
% 生成观测噪声
noise_B1L = sigma_B1L * randn(3, N);
noise_B3L = sigma_B3L * randn(3, N);
% 模拟电离层延迟 (频率相关)
iono_delay = sigma_iono_B1L * randn(1, N);
iono_B1L = repmat(iono_delay, 3, 1);
iono_B3L = (f_B1L/f_3L)^2 * repmat(iono_delay, 3, 1);
% 含噪声的观测值
obs_B1L = true_pos + noise_B1L + iono_B1L;
obs_B3L = true_pos + noise_B3L + iono_B3L;完整代码:
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者