飞控数传模块是飞行控制(飞控)系统的"神经系统",它负责采集各类传感器数据、执行运算并对外通信。要理解它的"运算方式",不能只看单一芯片,而需将其视为一个协同工作的硬件架构和数据处理流水线。
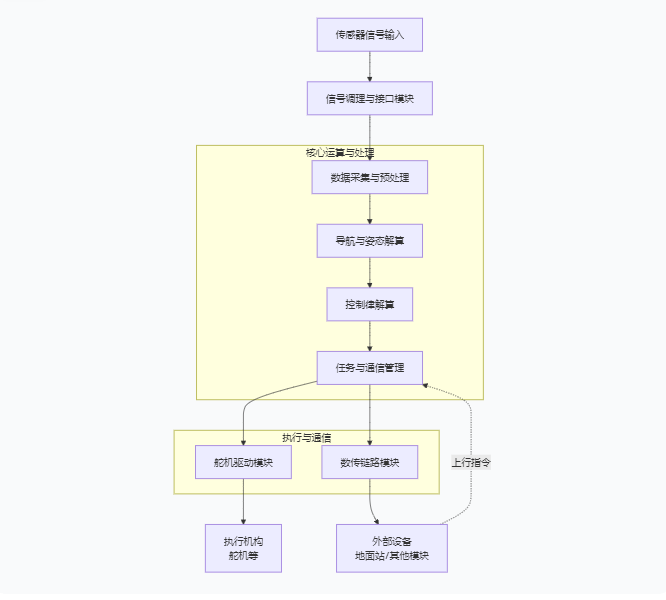
下面的流程图概括了数据在典型飞控系统中的核心处理与传输路径,展示了从信号输入到指令输出的全过程:
核心硬件架构与运算分工
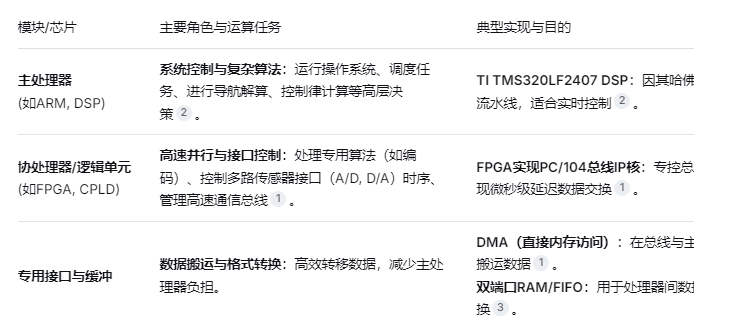
现代高性能飞控计算机常采用异构计算架构来满足实时性要求。下表对比了核心处理器与辅助模块的分工:
软件层面的运算流程
在软件层面,飞控系统的运算遵循一个严格的实时循环,通常由定时中断触发,确保控制的及时性。主要模块包括:
时间管理模块:在毫秒级时间内对无人机进行实时控制。
数据采集与处理模块:采集飞行状态与姿态参数,并进行遥测编码。
控制律解算模块:根据导航算法和传感器融合后的数据,解算出控制舵机等执行机构的具体指令。
通信模块:完成飞控计算机与其他机载外设之间的数据交换功能。
数传链路的关键设计
"数传"狭义上指飞控系统与外部(如地面站)的无线通信,广义上也包括系统内部模块间的高速数据通道。
内部总线与链路:用于模块间高速互联。例如基于PC/104总线的设计,通过DMA和双缓冲路径,速度可达40 Mb/s,延迟为微秒级。在高余度(冗余)系统中,交叉通道数据链路对可靠性至关重要。
外部遥测与遥控:飞控系统将状态参数通过机载无线电数据终端发回地面,并接收地面指令。导弹等飞行器的遥测信息还包括用于地面分析的数字和模拟信号。
接口的扩展与通用性:为连接众多传感器和执行器,飞控计算机需要扩展各种接口(如ARINC429、RS-422等串行总线)。通用接口模块设计可增强系统适应性。
