在计算机图形学中,光线追踪是一种能生成超逼真图像的核心技术------小到游戏里的光影反射,大到电影特效中的全局光照,甚至是太空场景模拟(如行星表面光影、星际尘埃折射),都离不开它的支持。与传统光栅化相比,光线追踪的核心优势是物理真实性,能自然模拟阴影、反射、折射等效果,且原理直观易懂,非常适合入门学习。
本文将从「核心思想→数学基础→简化代码实现」逐步拆解,用Python写一个最小可行版光线追踪器,让你在100行代码内生成第一个光线追踪图像,真正做到"上手即能用"。
一、先搞懂:光线追踪到底在做什么?
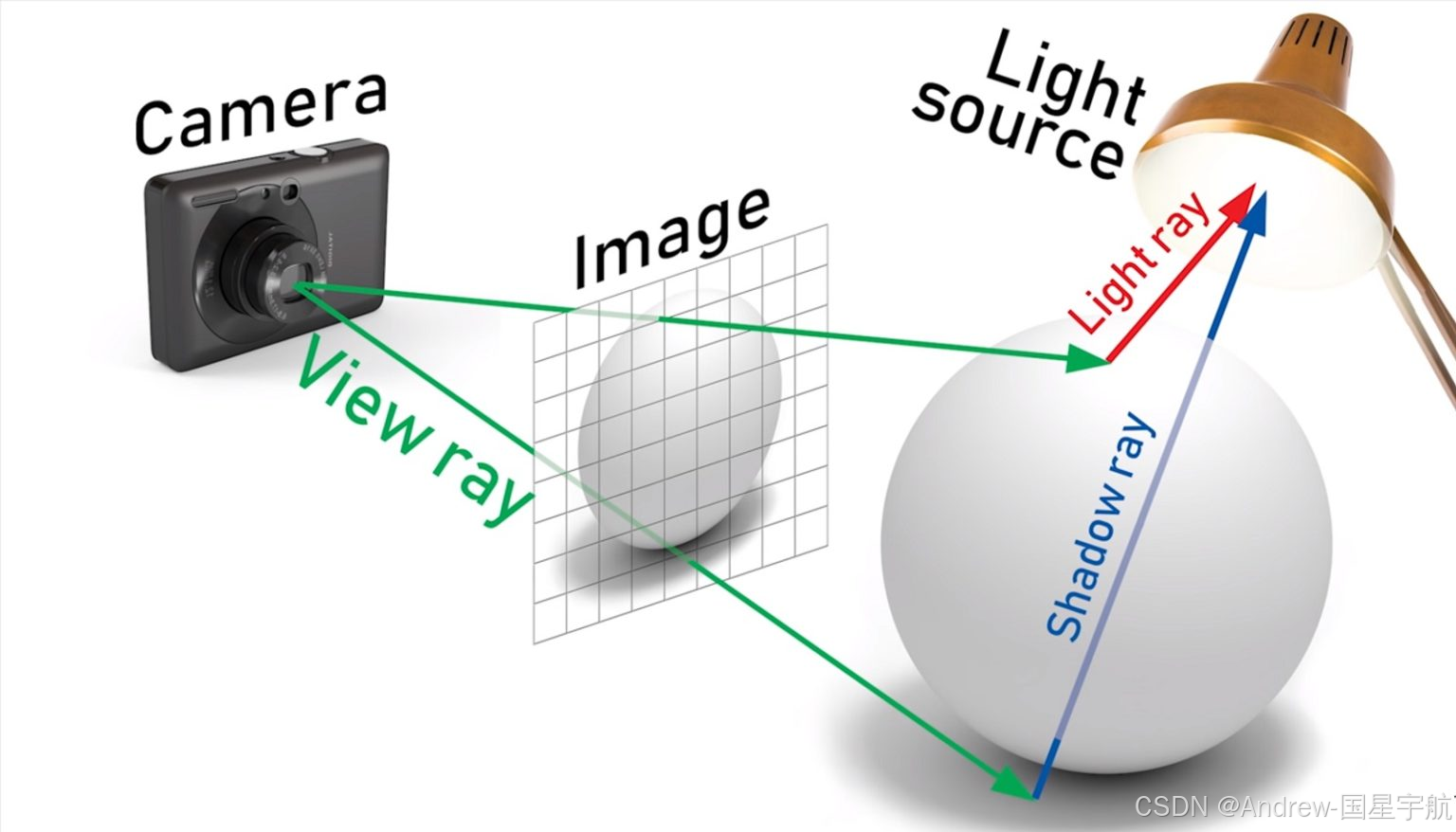
我们肉眼看到物体,本质是「光源发出的光线照射到物体上,经过反射/折射后进入眼睛」。但直接模拟这个过程(从光源出发追踪光线)效率极低------大部分光线不会刚好进入眼睛。
光线追踪的核心技巧是「逆向追踪」:从相机(眼睛)出发,向图像的每个像素发射一条"探测光线",追踪这条光线是否会与场景中的物体相交;如果相交,就计算该点的颜色(结合光源、材质),最终将颜色填充到对应像素。
这个过程可以类比为"用探照灯照场景":
- 探照灯(相机)向像素发射一束光;
- 光线碰到物体(如球体)就"反弹",并检查是否能直接看到光源(判断是否在阴影中);
- 根据物体材质(如漫反射、镜面反射)计算该点的最终颜色;
- 重复这个过程,直到所有像素都被填充。
光线追踪 vs 光栅化(快速对比)
| 特性 | 光栅化(传统游戏常用) | 光线追踪 |
|---|---|---|
| 核心逻辑 | 直接将3D物体投影到2D平面 | 逆向追踪光线与物体的交互 |
| 光影效果 | 需额外实现阴影、反射(效果较假) | 自然支持阴影、反射、折射 |
| 性能 | 速度快(实时渲染) | 速度慢(需离线渲染,可通过GPU/集群加速) |
| 适用场景 | 游戏、实时交互 | 电影特效、静态渲染、高精度模拟 |
对入门者来说,光线追踪的优势是"逻辑简单+效果惊艳",不需要复杂的矩阵变换(光栅化的痛点),只需掌握基础的几何计算即可。
二、核心数学基础(极简版,够用就好)
实现光线追踪只需要3个核心数学工具,无需深入推导,直接用公式即可:
1. 光线的数学表达
光线可以看作「从起点出发,沿某个方向无限延伸的直线」,用参数方程表示为:
r⃗(t)=O⃗+t⋅D⃗ \vec{r}(t) = \vec{O} + t \cdot \vec{D} r (t)=O +t⋅D
- O⃗\vec{O}O :光线起点(相机位置);
- D⃗\vec{D}D :光线方向向量(单位向量,长度=1);
- ttt:参数(t>0t>0t>0,表示光线传播的距离)。
2. 光线与物体的交点计算(以球体为例)
场景中最容易计算交点的物体是球体(复杂物体可由球体组合而成)。球体的方程为:
(P⃗−C⃗)⋅(P⃗−C⃗)=R2 (\vec{P} - \vec{C}) \cdot (\vec{P} - \vec{C}) = R^2 (P −C )⋅(P −C )=R2
- C⃗\vec{C}C :球心坐标;
- RRR:球体半径;
- P⃗\vec{P}P :球面上任意一点。
将光线方程代入球体方程,可推导出一个二次方程 at2+bt+c=0at^2 + bt + c = 0at2+bt+c=0,求解 ttt 即可得到交点:
- a=D⃗⋅D⃗a = \vec{D} \cdot \vec{D}a=D ⋅D (因 D⃗\vec{D}D 是单位向量,a=1a=1a=1,可简化计算);
- b=2⋅(D⃗⋅(O⃗−C⃗))b = 2 \cdot (\vec{D} \cdot (\vec{O} - \vec{C}))b=2⋅(D ⋅(O −C ));
- c=(O⃗−C⃗)⋅(O⃗−C⃗)−R2c = (\vec{O} - \vec{C}) \cdot (\vec{O} - \vec{C}) - R^2c=(O −C )⋅(O −C )−R2;
- 判别式 Δ=b2−4ac\Delta = b^2 - 4acΔ=b2−4ac:
- Δ<0\Delta < 0Δ<0:无交点(光线没碰到球体);
- Δ=0\Delta = 0Δ=0:光线与球体相切(1个交点);
- Δ>0\Delta > 0Δ>0:光线穿过球体(2个交点,取 ttt 最小的那个,即最近的交点)。
3. 颜色计算(漫反射模型)
物体的颜色由「光源照射+材质反射」决定,我们先实现最简单的Lambert漫反射模型 (适合模拟粗糙表面,如墙面、地面):
color=材质颜色×光源颜色×max(0,N⃗⋅L⃗) color = 材质颜色 \times 光源颜色 \times \max(0, \vec{N} \cdot \vec{L}) color=材质颜色×光源颜色×max(0,N ⋅L )
- N⃗\vec{N}N :交点处的物体法向量(球体的法向量=交点-球心,归一化后);
- L⃗\vec{L}L :交点指向光源的单位向量;
- max(0,N⃗⋅L⃗)\max(0, \vec{N} \cdot \vec{L})max(0,N ⋅L ):保证只有光线照射到的面才会发光(法向量与光线方向夹角≤90°)。
三、Python代码实现:100行生成第一个光线追踪图
我们用Python的PIL库(处理图像)和numpy(向量计算)实现一个简化版光线追踪器,功能包括:
- 场景:1个光源 + 3个球体;
- 效果:漫反射 + 阴影;
- 输出:200x200的图像文件。
第一步:安装依赖
bash
pip install pillow numpy第二步:完整代码(注释详细,可直接运行)
python
import numpy as np
from PIL import Image
# -------------------------- 1. 基础工具函数(向量计算)--------------------------
def normalize(v):
"""向量归一化(转为单位向量)"""
return v / np.linalg.norm(v)
def dot(v1, v2):
"""向量点积"""
return np.dot(v1, v2)
def subtract(v1, v2):
"""向量减法"""
return v1 - v2
# -------------------------- 2. 场景定义(球体+光源)--------------------------
class Sphere:
def __init__(self, center, radius, color, specular=500):
self.center = np.array(center, dtype=np.float32) # 球心坐标 (x,y,z)
self.radius = radius # 半径
self.color = np.array(color, dtype=np.float32) # 颜色 (R,G,B),0-255
self.specular = specular # 镜面反射系数(越大越亮)
class Light:
def __init__(self, position, intensity):
self.position = np.array(position, dtype=np.float32) # 光源位置
self.intensity = intensity # 光强(0-255)
# 场景初始化:3个球体 + 1个点光源
scene = [
Sphere(center=(0, -1, 3), radius=1, color=(255, 0, 0)), # 红色球体
Sphere(center=(2, 0, 4), radius=1, color=(0, 255, 0)), # 绿色球体
Sphere(center=(-2, 0, 4), radius=1, color=(0, 0, 255)), # 蓝色球体
Sphere(center=(0, -5001, 0), radius=5000, color=(255, 255, 255)) # 白色地面(超大球体)
]
light = Light(position=(5, 5, -10), intensity=255)
# -------------------------- 3. 光线与球体交点检测 --------------------------
def intersect_ray_sphere(ray_origin, ray_dir, sphere):
"""
计算光线与球体的交点
返回:t(光线到交点的距离),若无交点返回None
"""
oc = subtract(ray_origin, sphere.center) # O - C
a = dot(ray_dir, ray_dir) # 单位向量点积=1,可简化为1
b = 2 * dot(oc, ray_dir)
c = dot(oc, oc) - sphere.radius ** 2
delta = b ** 2 - 4 * a * c # 判别式
if delta < 0:
return None # 无交点
# 取最近的交点(t>0)
t1 = (-b - np.sqrt(delta)) / (2 * a)
t2 = (-b + np.sqrt(delta)) / (2 * a)
return t1 if t1 > 0 else t2
# -------------------------- 4. 计算像素颜色 --------------------------
def trace_ray(ray_origin, ray_dir, scene, light, depth=0):
"""
追踪一条光线,返回该光线对应的颜色
depth:递归深度(用于反射/折射,本文简化为0)
"""
# 1. 找到光线与场景中最近的物体
closest_t = float('inf')
closest_sphere = None
for sphere in scene:
t = intersect_ray_sphere(ray_origin, ray_dir, sphere)
if t and t < closest_t:
closest_t = t
closest_sphere = sphere
# 2. 无交点:返回黑色(背景)
if closest_sphere is None:
return np.array([0, 0, 0], dtype=np.uint8)
# 3. 计算交点坐标和法向量
hit_point = ray_origin + closest_t * ray_dir # 交点 P = O + t*D
normal = normalize(subtract(hit_point, closest_sphere.center)) # 法向量 N = (P - C)归一化
# 4. 计算漫反射颜色(Lambert模型)
light_dir = normalize(subtract(light.position, hit_point)) # 光线方向 L = (光源 - 交点)归一化
diffuse_intensity = max(0, dot(normal, light_dir)) # 漫反射强度
diffuse_color = closest_sphere.color * diffuse_intensity * (light.intensity / 255)
# 5. 计算阴影(判断交点是否被其他物体遮挡)
shadow_ray_origin = hit_point + 1e-3 * normal # 阴影光线起点(避免自遮挡)
shadow_ray_dir = light_dir
shadow_closest_t = intersect_ray_sphere(shadow_ray_origin, shadow_ray_dir, closest_sphere)
for sphere in scene:
if sphere == closest_sphere:
continue
t = intersect_ray_sphere(shadow_ray_origin, shadow_ray_dir, sphere)
if t and t < closest_t:
# 有遮挡:阴影区域,颜色减半
diffuse_color *= 0.5
break
# 6. 限制颜色范围在0-255
return np.clip(diffuse_color, 0, 255).astype(np.uint8)
# -------------------------- 5. 主渲染函数 --------------------------
def render(scene, light, width=200, height=200):
"""
渲染场景:为每个像素发射光线,计算颜色
width/height:图像分辨率
"""
# 相机参数(简化:相机在原点,看向z轴正方向)
camera_origin = np.array([0, 0, 0], dtype=np.float32)
fov = np.pi / 3 # 视场角(60度)
aspect_ratio = width / height # 宽高比
# 创建图像画布
image = Image.new("RGB", (width, height))
pixels = image.load()
# 遍历每个像素
for y in range(height):
for x in range(width):
# 1. 将像素坐标转为标准化设备坐标(NDC):[-1,1]
ndc_x = (x / width) * 2 - 1 # x: 0→width → -1→1
ndc_y = 1 - (y / height) * 2 # y: 0→height → 1→-1(翻转y轴)
# 2. 转为相机空间光线方向(考虑视场角和宽高比)
ray_dir_x = ndc_x * aspect_ratio * np.tan(fov / 2)
ray_dir_y = ndc_y * np.tan(fov / 2)
ray_dir_z = 1 # 相机看向z轴正方向
ray_dir = normalize(np.array([ray_dir_x, ray_dir_y, ray_dir_z]))
# 3. 追踪光线,获取颜色
color = trace_ray(camera_origin, ray_dir, scene, light)
# 4. 填充像素
pixels[x, y] = tuple(color)
# 保存图像
image.save("ray_tracing_result.png")
print("渲染完成!图像已保存为 ray_tracing_result.png")
# -------------------------- 运行渲染 --------------------------
if __name__ == "__main__":
render(scene, light)第三步:运行结果
代码运行后会生成 ray_tracing_result.png,效果如下(200x200分辨率):
- 三个彩色球体(红、绿、蓝)落在白色地面上;
- 每个球体都有自然的阴影(被其他球体或地面遮挡);
- 球体表面的亮度随光线角度变化(漫反射效果)。
如果你的运行结果是黑色,检查以下几点:
- 球体坐标和半径是否正确(避免光线没击中物体);
- 光源位置是否合理(本文光源在(5,5,-10),从侧后方照射);
numpy和pillow版本是否兼容(建议用Python 3.8+)。
四、入门后如何进阶?
本文实现的是「最小可行版光线追踪器」,仅包含漫反射和阴影。要实现更逼真的效果,可以逐步添加以下功能:
1. 基础进阶(1-2天可完成)
- 镜面反射 :在
trace_ray中添加递归,计算反射光线(反射向量公式:R⃗=2(N⃗⋅L⃗)N⃗−L⃗\vec{R} = 2(\vec{N} \cdot \vec{L})\vec{N} - \vec{L}R =2(N ⋅L )N −L ); - 抗锯齿(Supersampling):每个像素发射多条光线(如4x4),取颜色平均值,解决锯齿边缘;
- 多光源支持 :修改
trace_ray,遍历多个光源计算总光照。
2. 中级进阶(1周可完成)
- 折射效果:添加透明材质(如玻璃球),用斯涅尔定律计算折射光线;
- 纹理映射:给球体贴纹理图片(用球坐标映射纹理像素);
- 并行加速 :用
multiprocessing或numba加速渲染(Python单线程渲染200x200需几秒,并行后可提速10倍)。
3. 高级方向(结合高性能计算)
- GPU加速:用CUDA(Python+PyTorch/CuPy)重写代码,渲染1080P图像;
- 路径追踪(Path Tracing):用蒙特卡洛方法模拟全局光照(更逼真的间接照明);
- 太空场景适配:模拟行星表面的漫反射+镜面反射(如月球的灰阶材质、木星的气态纹理),添加星空背景(随机生成远距离光点)。
五、核心总结
光线追踪的本质的是「逆向追踪光线+几何交点计算+物理着色」,其入门门槛远低于想象------只要掌握"向量点积、归一化"两个核心数学工具,就能实现基础效果。
本文的Python代码虽然简化了很多细节(如无反射、无折射),但完整保留了光线追踪的核心流程:相机发射光线→检测交点→计算光照→填充像素。你可以在此基础上逐步迭代,最终实现支持复杂材质和全局光照的渲染器。
如果在扩展过程中遇到问题(如反射递归栈溢出、折射方向计算错误),欢迎在评论区交流~ 后续会更新"光线追踪+GPU加速""路径追踪实现"等进阶内容,敬请关注!