【FPB-RA6E2 开发板】Zephyr 串口打印 DHT11 温湿度
本文介绍了瑞萨 FPB-RA6E2 开发板使用 Zephyr 开发环境实现 DHT11 获取环境温湿度并串口打印的项目设计。
项目介绍
- 准备工作:硬件连接、流程图、开发环境准备等;
- 工程代码:包括主程序代码和配置文件代码;
- 编译上传:工程编译和固件上传等流程;
- 效果演示:使用串口调试软件获取打印的 DHT11 温湿度数据。
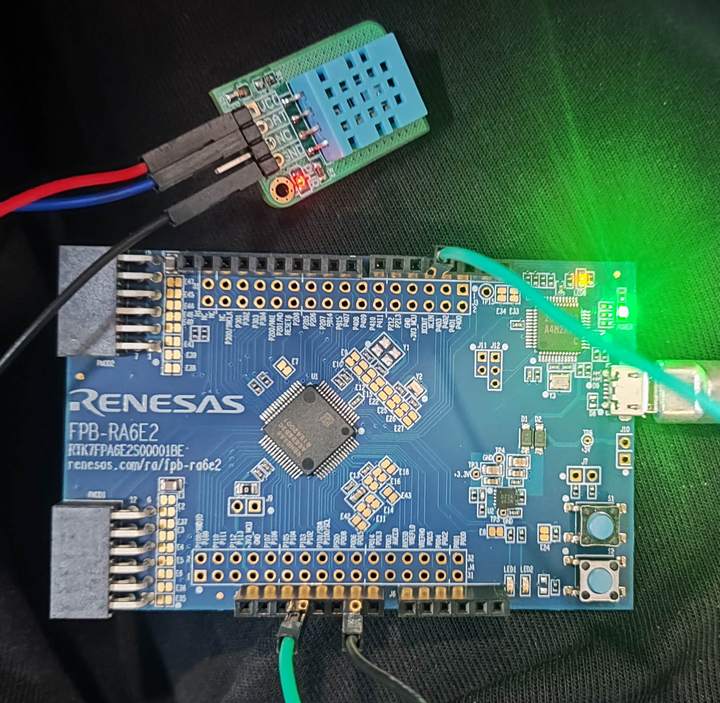
硬件连接
| DHT11 | FPB-RA6E2 |
|---|---|
| VCC | 3V3 |
| DATA | P500(Arduino D4 引脚) |
| GND | GND |
实物连接
流程图
否
是
开始
初始化
DHT传感器
就绪
结束
主循环
读取信息
解码器 API
解码温度通道
解码湿度通道
格式化温度值
格式化湿度值
串口打印结果
延时
环境准备
Zephyr 开发环境搭建流程详见:【FPB-RA6E2 开发板】介绍、Zephyr 环境搭建、工程测试 .
-
以管理员身份运行 PowerShell 终端;
-
进入 Zephyr 开发文件夹路径,并激活 Python 虚拟环境;
bash
cd ...\Zephyr_Project\Renesas
Set-ExecutionPolicy -Scope Process -ExecutionPolicy Bypass # 每次打开新终端均需要执行该指令
.venv\Scripts\Activate.ps1工程代码
打开 ...\zephyr\samples\sensor\dht_polling\src\main.c 主程序文件,代码如下
c++
/*
* Copyright (c) 2023 Ian Morris
*
* SPDX-License-Identifier: Apache-2.0
*/
#include <stdio.h>
#include <stdlib.h>
#include <zephyr/device.h>
#include <zephyr/sys/util_macro.h>
#include <zephyr/kernel.h>
#include <zephyr/drivers/sensor.h>
#include <zephyr/drivers/sensor_data_types.h>
#include <zephyr/rtio/rtio.h>
#include <zephyr/dsp/print_format.h>
#define DHT_ALIAS(i) DT_ALIAS(_CONCAT(dht, i))
#define DHT_DEVICE(i, _) \
IF_ENABLED(DT_NODE_EXISTS(DHT_ALIAS(i)), (DEVICE_DT_GET(DHT_ALIAS(i)),))
/* Support up to 10 temperature/humidity sensors */
static const struct device *const sensors[] = {LISTIFY(10, DHT_DEVICE, ())};
#define DHT_IODEV(i, _) \
IF_ENABLED(DT_NODE_EXISTS(DHT_ALIAS(i)), \
(SENSOR_DT_READ_IODEV(_CONCAT(dht_iodev, i), DHT_ALIAS(i), \
{SENSOR_CHAN_AMBIENT_TEMP, 0}, \
{SENSOR_CHAN_HUMIDITY, 0})))
LISTIFY(10, DHT_IODEV, (;));
#define DHT_IODEV_REF(i, _) \
COND_CODE_1(DT_NODE_EXISTS(DHT_ALIAS(i)), (CONCAT(&dht_iodev, i)), (NULL))
static struct rtio_iodev *dht_iodev[] = { LISTIFY(10, DHT_IODEV_REF, (,)) };
RTIO_DEFINE(dht_ctx, 1, 1);
int main(void)
{
int rc;
for (size_t i = 0; i < ARRAY_SIZE(sensors); i++) {
if (!device_is_ready(sensors[i])) {
printk("sensor: device %s not ready.\n", sensors[i]->name);
return 0;
}
}
while (1) {
for (size_t i = 0; i < ARRAY_SIZE(sensors); i++) {
struct device *dev = (struct device *) sensors[i];
uint8_t buf[128];
rc = sensor_read(dht_iodev[i], &dht_ctx, buf, 128);
if (rc != 0) {
printk("%s: sensor_read() failed: %d\n", dev->name, rc);
return rc;
}
const struct sensor_decoder_api *decoder;
rc = sensor_get_decoder(dev, &decoder);
if (rc != 0) {
printk("%s: sensor_get_decode() failed: %d\n", dev->name, rc);
return rc;
}
uint32_t temp_fit = 0;
struct sensor_q31_data temp_data = {0};
decoder->decode(buf,
(struct sensor_chan_spec) {SENSOR_CHAN_AMBIENT_TEMP, 0},
&temp_fit, 1, &temp_data);
uint32_t hum_fit = 0;
struct sensor_q31_data hum_data = {0};
decoder->decode(buf,
(struct sensor_chan_spec) {SENSOR_CHAN_HUMIDITY, 0},
&hum_fit, 1, &hum_data);
printk("%16s: temp is %s%d.%d °C humidity is %s%d.%d %%RH\n", dev->name,
PRIq_arg(temp_data.readings[0].temperature, 2, temp_data.shift),
PRIq_arg(hum_data.readings[0].humidity, 2, hum_data.shift));
}
k_msleep(1000);
}
return 0;
}保存代码。
配置文件
新建 ...\zephyr\samples\sensor\dht_polling\boards\fpb_ra6e2.overlay 文件,并添加如下代码
c++
/* SPDX-License-Identifier: Apache-2.0 */
/ {
aliases {
dht0 = &dht11;
};
dht11: dht11 {
compatible = "aosong,dht";
dio-gpios = <&ioport5 0 GPIO_ACTIVE_LOW>; /* P500 */
status = "okay";
};
};
&ioport5 {
status = "okay";
};保存代码。
编译上传
代码和配置完成后,执行工程编译和固件上传指令。
固件编译
进入 zephyr 所在文件夹,构建目标工程
bash
cd zephyr
west build -p always -b fpb_ra6e2 .\samples\sensor\blinky固件上传
待编译完成,连接开发板,执行指令
bash
west flash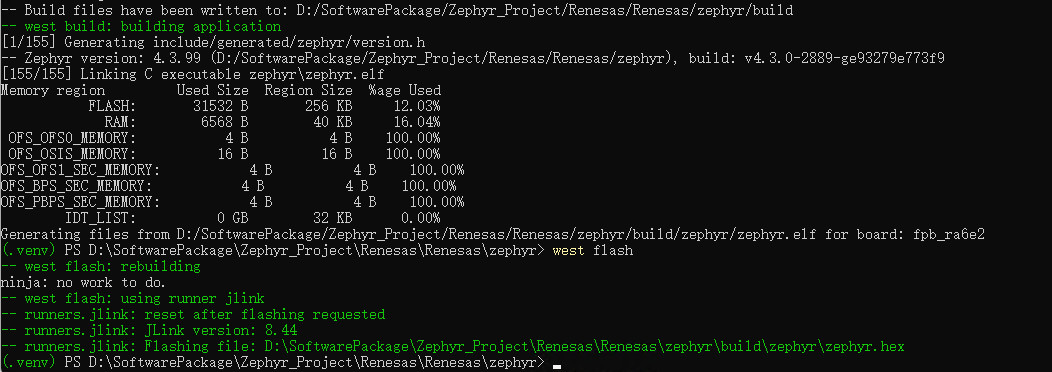
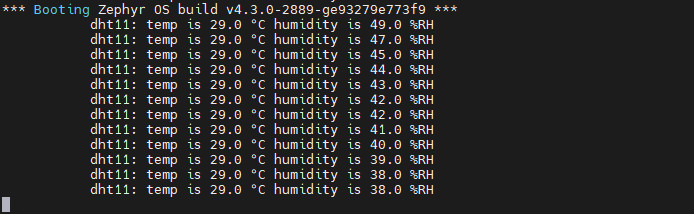
效果演示
使用 MobaXterm 软件连接 J-LINK 虚拟串口,波特率115200,可获取 DHT11 采集的环境温湿度信息;
总结
本文介绍了瑞萨 FPB-RA6E2 开发板使用 Zephyr 开发环境实现 DHT11 获取环境温湿度并串口打印的项目设计,为相关产品的快速开发和应用设计提供了参考。