这些概念和模型都是很基础的内容,但是问题就出在这个基础两个字上面,现在出现了N个版本,导致很多人在这里知识点遗漏,所以非常需要梳理一次!
一、3D到2D-世界如何呈现于我们的图像之中
世界坐标系 (World)
↓ 外参(R, t)
相机坐标系 (Camera)
↓ 透视投影(除以 Z)
归一化像平面 (Normalized Image Plane)
↓ 内参(fx, fy, cx, cy)
像素坐标系 (Image / Pixel)1.1世界坐标 → 相机坐标(外参)
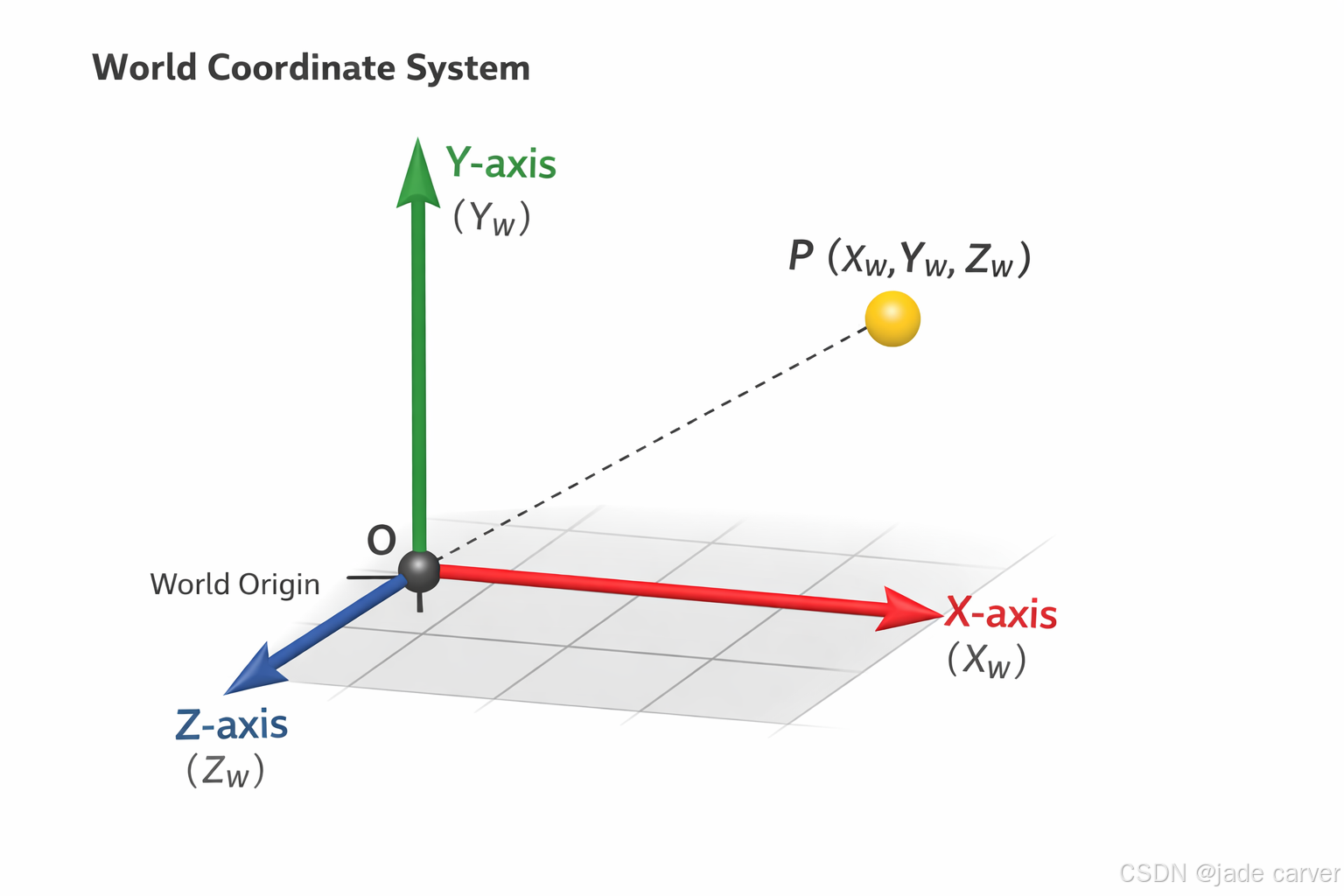
世界坐标系(World Coordinate)
世界坐标系是三维空间中描述物体绝对位置的基准坐标系,广泛应用于计算机图形学、机器人学及计算机视觉等领域。在计算机视觉中,世界坐标系作为环境参考基准,与摄像机坐标系通过旋转矩阵和平移向量转换,实现三维空间点到二维图像平面的映射
所有 3D 点定义在一个统一坐标系中,比如 3DGS 的高斯中心 (X_w, Y_w, Z_w)
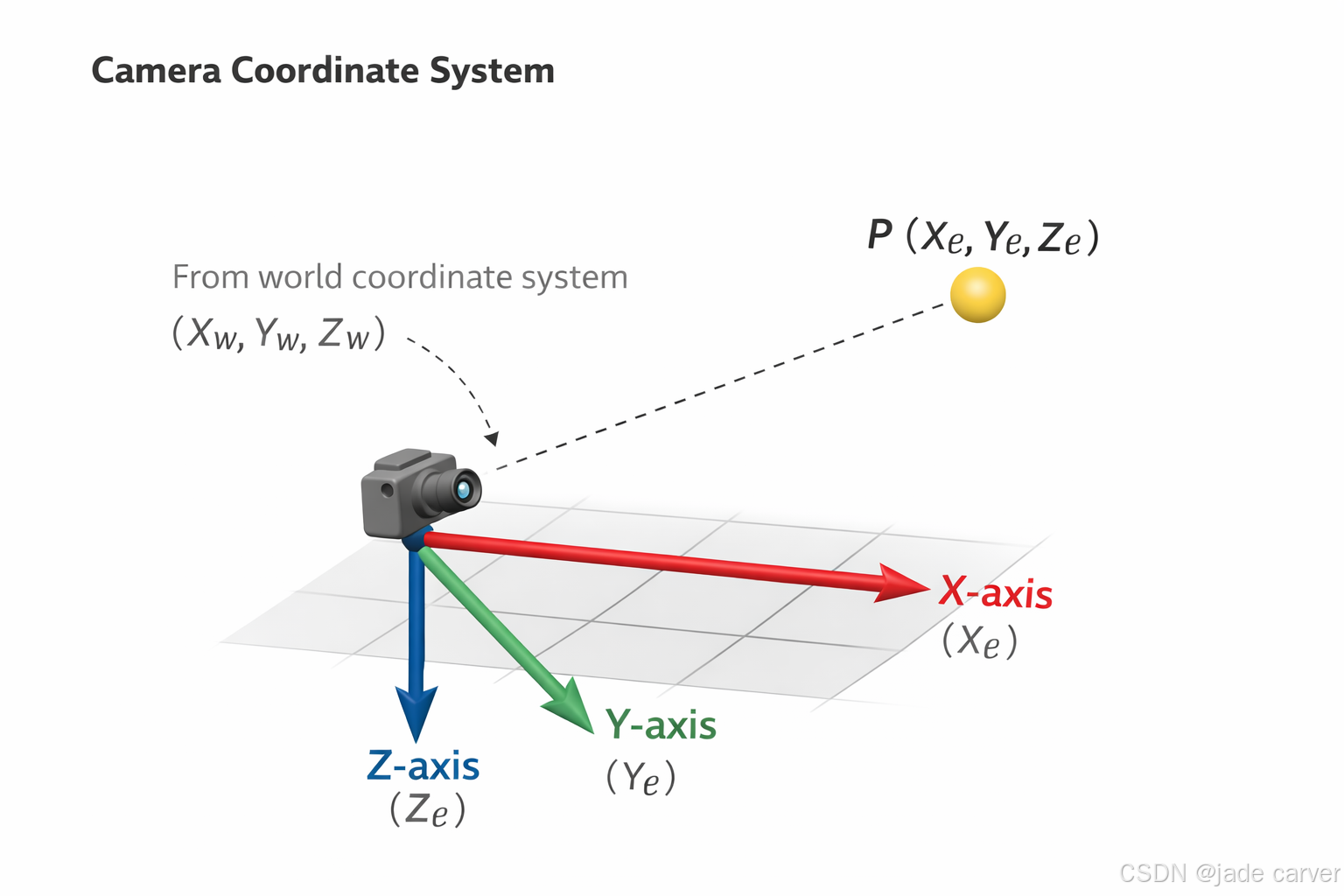
相机坐标系(Camera Coordinate)
相机坐标系是以相机光心(聚焦中心)为原点建立的三维直角坐标系。该坐标系通过刚体变换(旋转矩阵和平移向量)实现与世界坐标系的转换。
原点在 **相机光心,**通常定义:
- X:向右
- Y:向下
- Z:向前(指向拍摄方向)
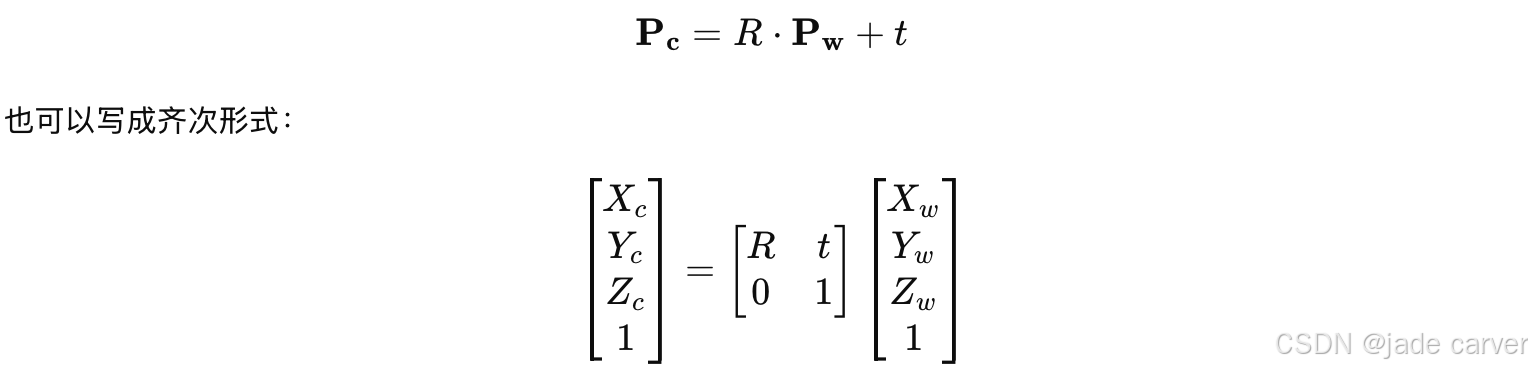
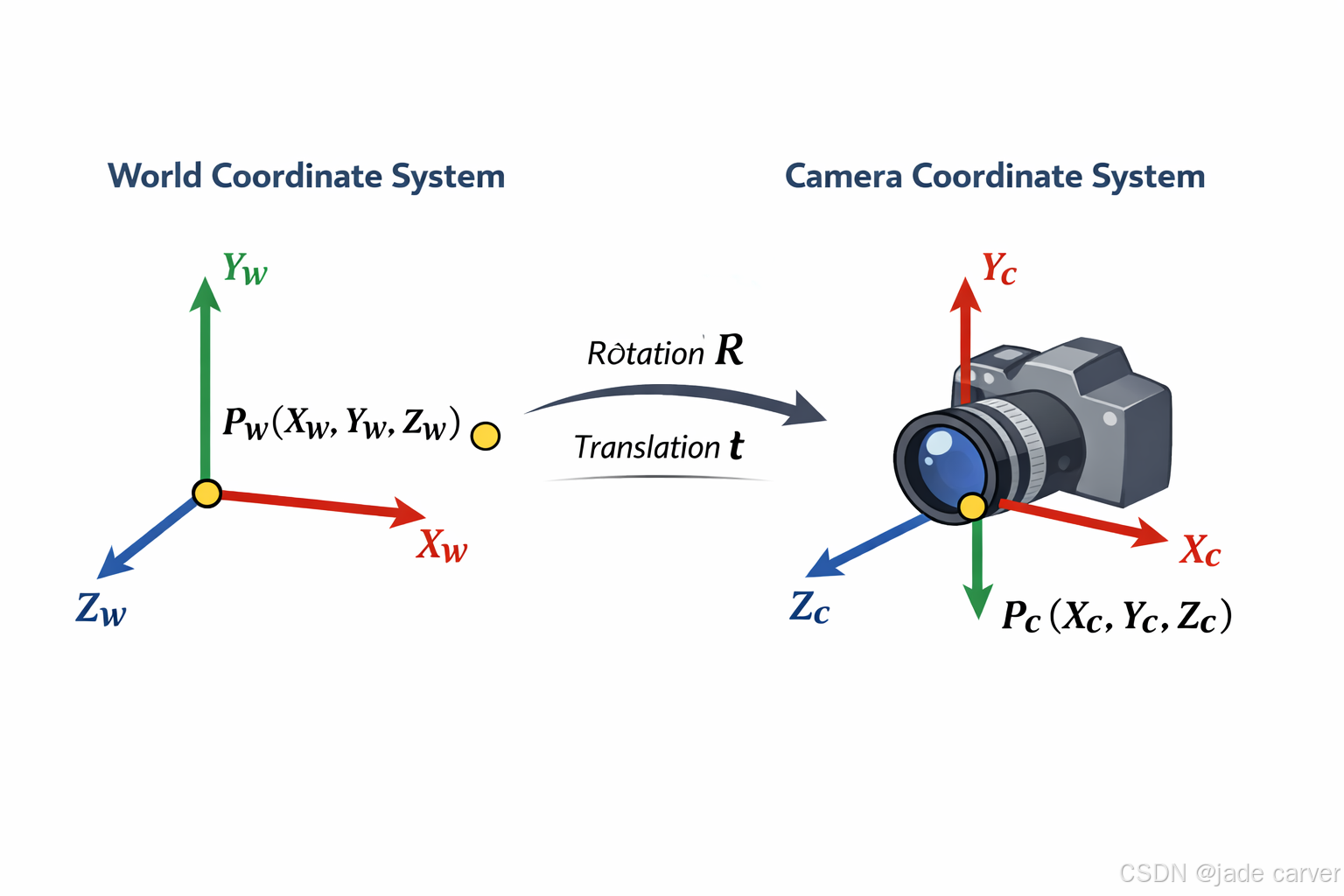
外参:旋转 + 平移
相机在世界中有一个姿态:
- 旋转矩阵
R(3×3) - 平移向量
t(3×1)
世界点 → 相机点通过这样转换:
1.2.相机坐标(X,Y,Z) → 成像平面坐标系(x,y)-以pinhole为例
以O点为中心,可以构建一个下图中的相似三角形(注意图中O'P'的距离虽然不是X',想象把P'分别投影到x', y'的三角形依然是相似的:
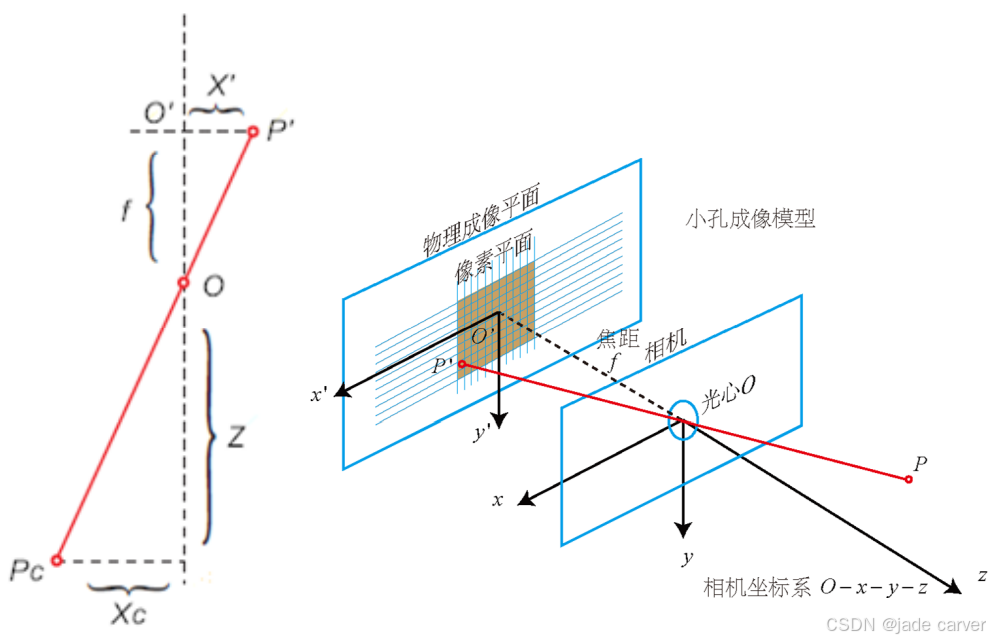
根据相似三角形,可以构建如下关系:

用矩阵表示如下:
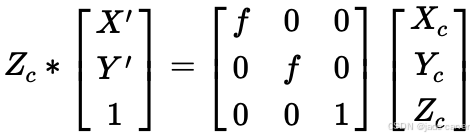
这里的 是深度,具体来说,就是在相机坐标系下的绝对深度,深度很重要,后面还会专门提到逆深度,因为逆深度可以完美表达我们人眼中近大远小的现象。
是深度,具体来说,就是在相机坐标系下的绝对深度,深度很重要,后面还会专门提到逆深度,因为逆深度可以完美表达我们人眼中近大远小的现象。
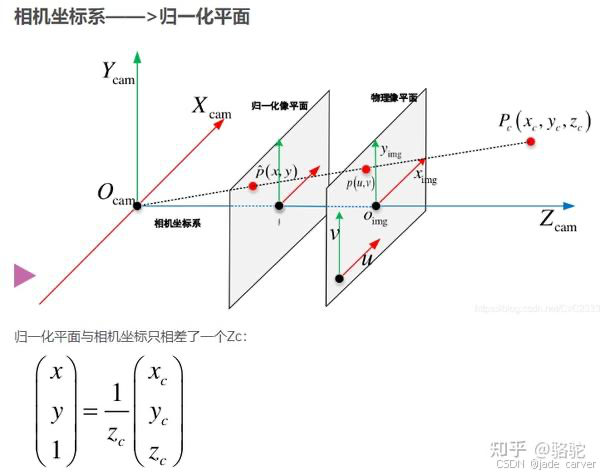
1.3归一化图像坐标(Normalized Plane)
归一化图像坐标的定义
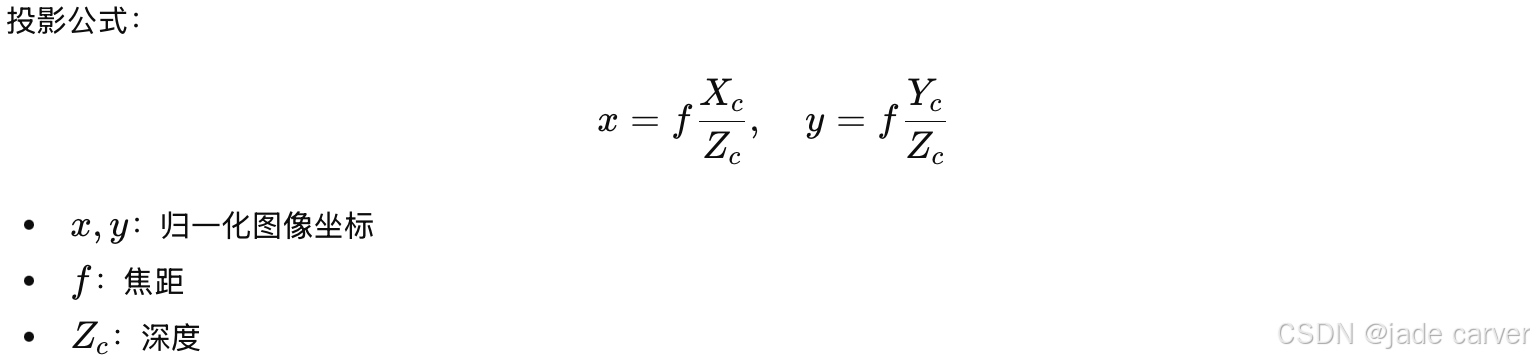
在标准 pinhole 模型中,成像平面在距离相机原点 O 的位置为 f(焦距),投影公式为:
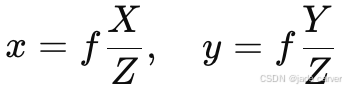
如果我们把焦距标准化为 f=1,就得到 归一化图像坐标:
- 单位 不是像素,而是相机坐标系下的比值(长度比)。
- 原点在 光轴中心(即相机光心正下方)。
- 这是一个虚拟成像平面,通常称为 Normalized Plane。
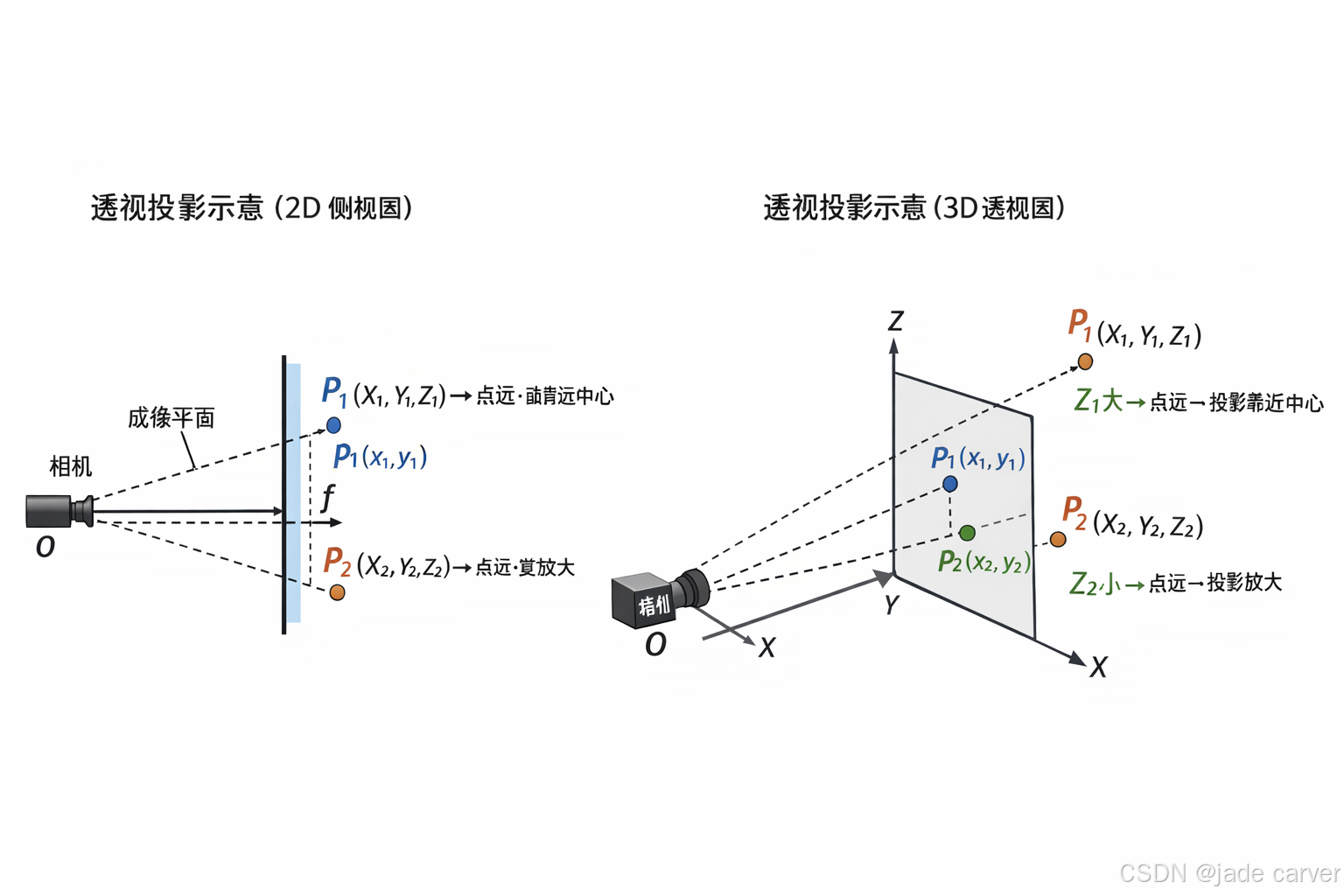
物理意义
- 投影到归一化平面,去掉了焦距的影响,保留了 透视缩放 的本质。
- 点离相机越远(Z 大),归一化坐标越小;点离相机越近(Z 小),归一化坐标越大。
- 这个坐标系常用于 计算视差、相机内参归一化 ,或者用于深度估计网络中,注意,这里已经是用逆深度
了
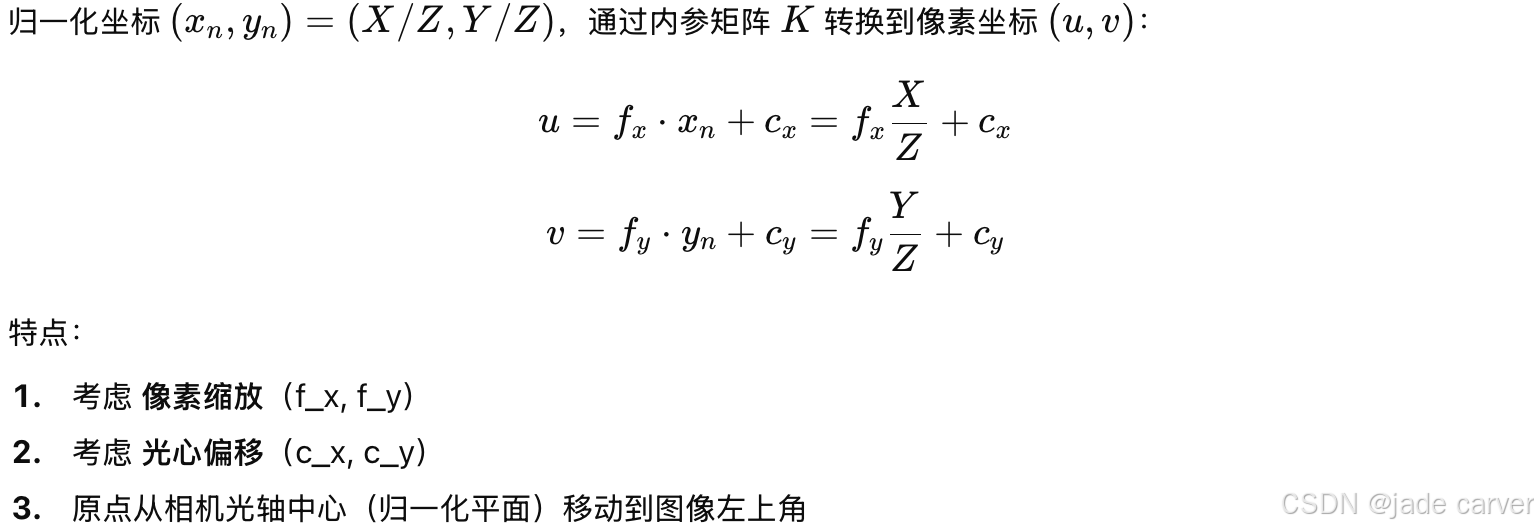
1.4归一化坐标+相机内参 → 像素坐标
| 特性 | 图像物理坐标系 | 图像像素坐标系 |
|---|---|---|
| 单位 | 长度单位(米、毫米等) | 像素 |
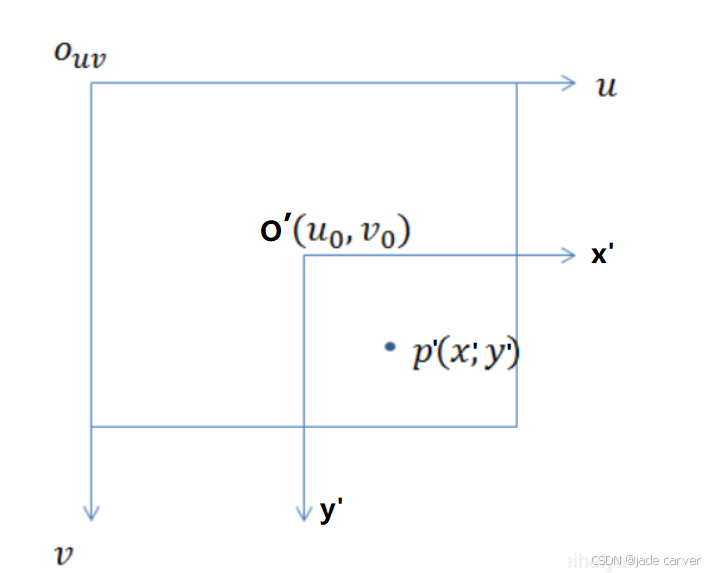
| 原点 | 光轴中心(图像中心) | 左上角 |
| 方向 | X 向右,Y 向上(通常) | u 向右,v 向下 |
图像物理坐标系采用的是长度单位,坐标原点一般是图片中心位置;而图像像素坐标系采用的是像素单位,坐标原点一般是图片左上角位置,如下图所示,因此图像物理坐标系转换成图像像素坐标系需要两步:
- 根据一个像素占多少长度,将长度单位转换为像素单位
- 将转换后的像素坐标进行平移,使坐标原点为左上角
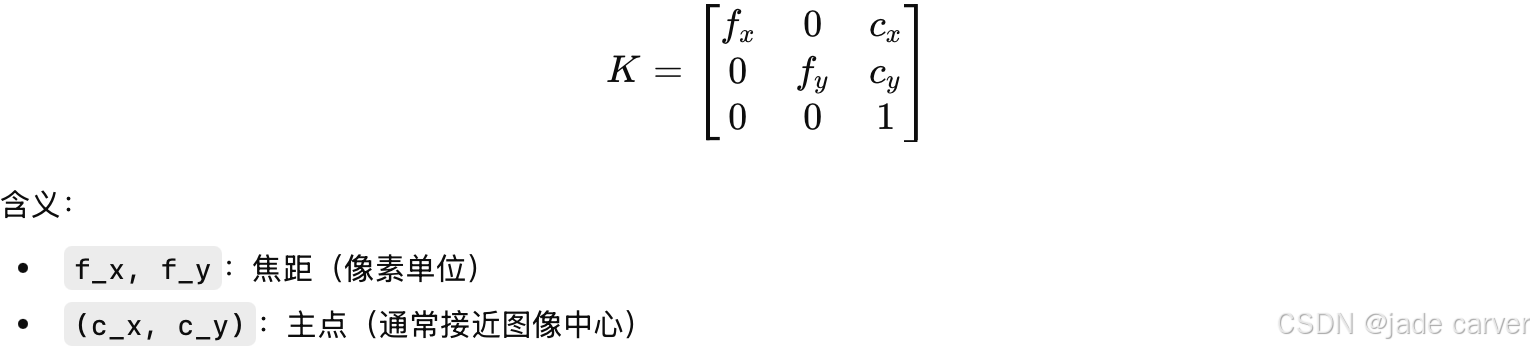
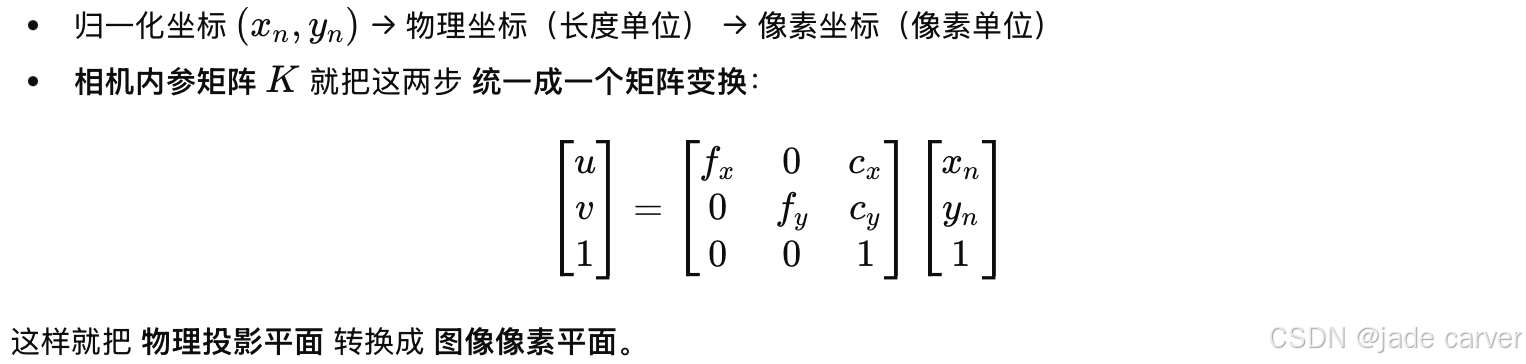
相机内参矩阵 K
从归一化坐标到像素坐标
详细过程
第一步:长度单位 → 像素单位
- 根据像素尺寸或者焦距,长度单位变为像素单位。
- 对应公式就是:

这里 fx,fy 就表示 每个方向像素长度对应多少物理长度。
第二步:坐标平移(原点从中心移到左上角)
平移主点到左上角,公式为:

- cx,cy 是图像中心到左上角的偏移。
- 这一步对应 相机内参矩阵 K 中的偏移量。
总结
二、深度与逆深度
2.1深度(Depth, Z)
定义

数学关系
深度越大,投影越靠近图像中心(透视收缩效果)
| 深度 Z | 投影效果 |
|---|---|
| 小(近) | 放大、明显位移 |
| 大(远) | 缩小、收紧到中心 |
2.2逆深度(Inverse Depth, 1/Z)
定义
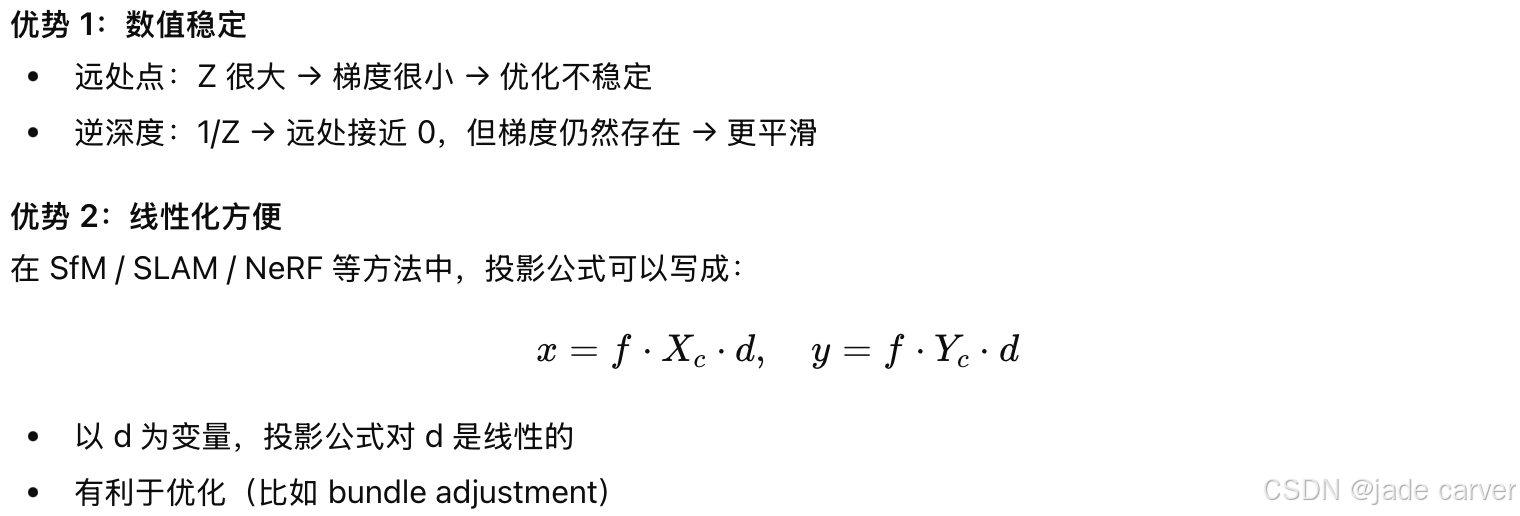
为什么用逆深度?
| Z_c | 1/Z_c |
|---|---|
| 1m | 1.0 |
| 2m | 0.5 |
| 10m | 0.1 |
| 100m | 0.01 |
2.3从 SfM 点到图像深度示例
假设:
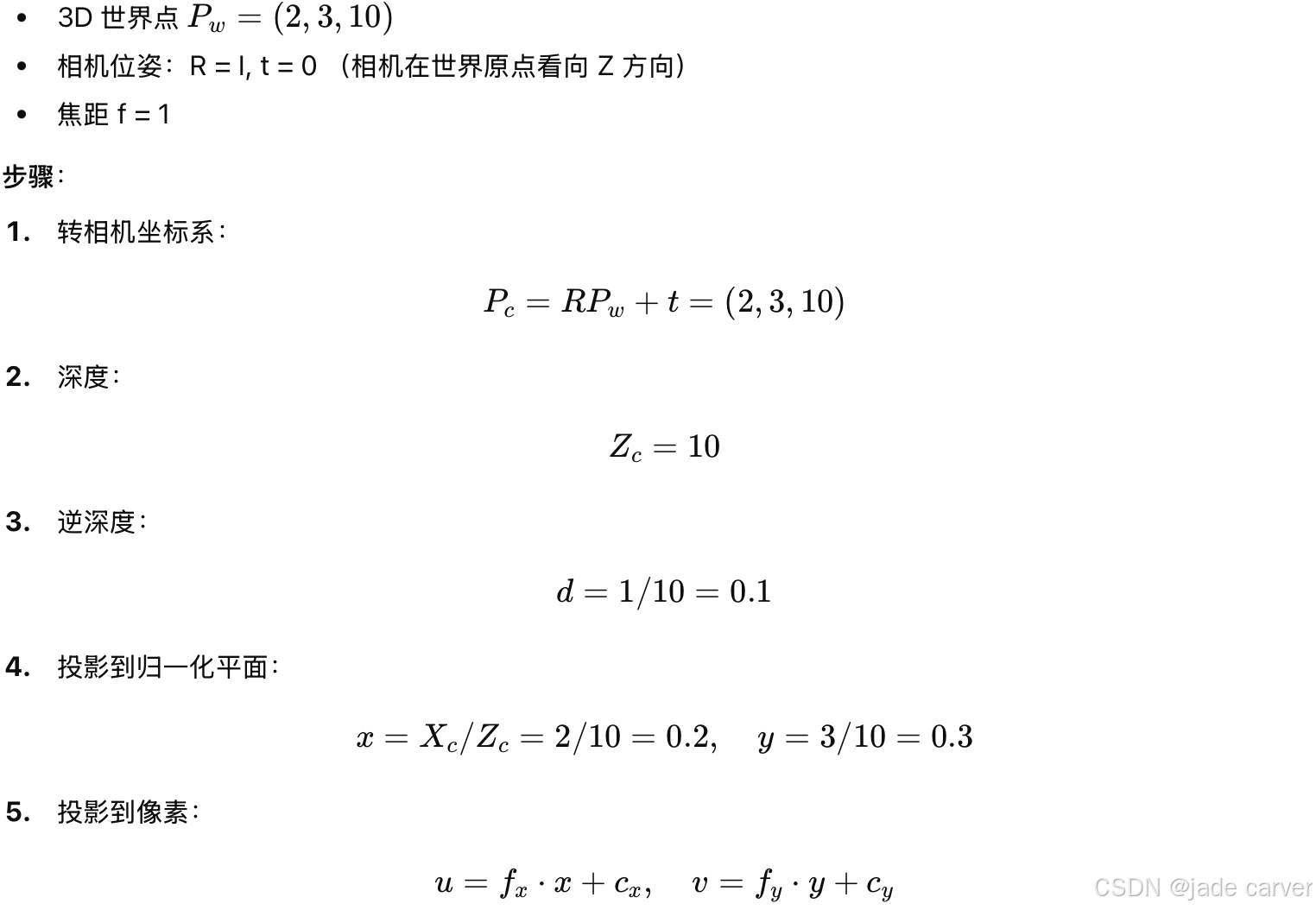
三、在3DGS中深度与SfM的结合
3.1问题背景
深度估计模型输出: 通常是单目图像的相对深度,没有绝对尺度,单位和 SfM 点云世界坐标不一致,远处/近处比例对,但整体大小、偏移是未知的
**SfM 结果:**提供稀疏点云(世界坐标系),可以算出相机位姿和稀疏深度(稀疏但尺度真实)可以作为单目深度尺度参考
目标: 利用单目深度模型的密集深度 → 转换成相机坐标系的逆深度,但必须 匹配 SfM 的尺度和偏移,否则渲染 / 优化不收敛。
3.2scale & offset 对齐

使用线性变换对齐

- s:尺度因子(scale)
- o:偏移量(offset)
- 目标:让大模型估计的逆深度 整体匹配 SfM 的稀疏深度尺度
求解 scale & offset
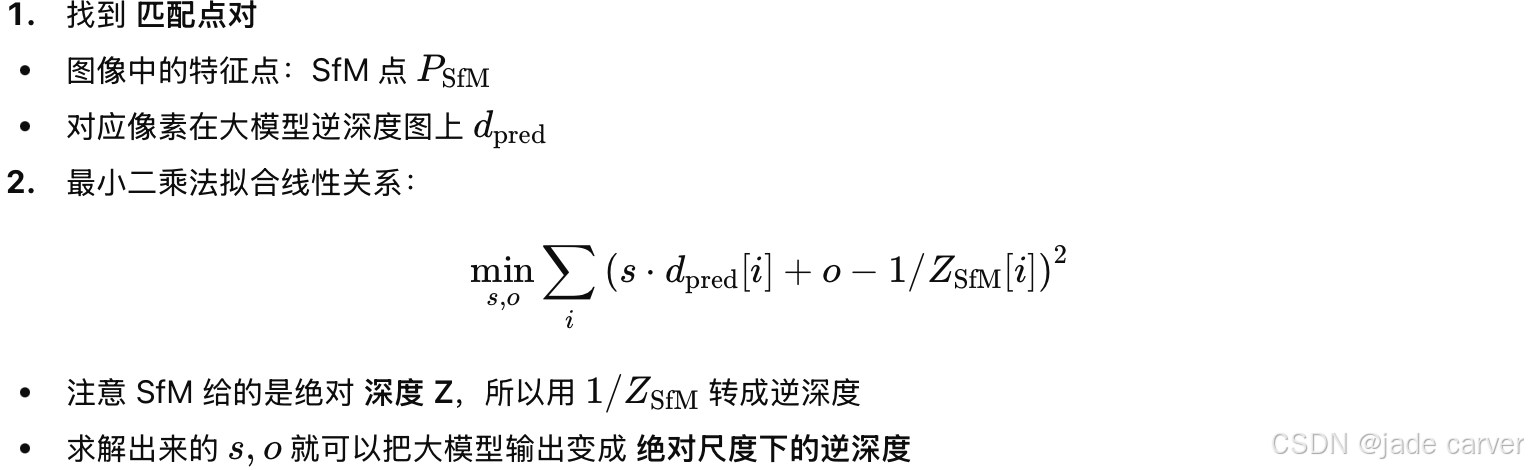
总结
- 大模型深度是相对尺度 , 不能直接用
- SfM 提供绝对尺度参考 ,可以纠正整体缩放和偏移
- 对齐后:

- 在3DGS后续的深度loss中,由于统一到了SfM坐标系,故可以以此作为ground truth来优化
| 数据源 | 特性 | 使用方式 |
|---|---|---|
| 大模型逆深度 (d_\text{pred}) | 相对尺度,密集 | 提供高密度几何 / 细节 |
| SfM 绝对尺度点云 | 稀疏,绝对尺度 | 用于 scale & offset 对齐 |
| 对齐后的逆深度 (d_\text{aligned}) | 密集 + 绝对尺度 | 初始化高斯点,投影渲染 |