ROS话题发布
-
创建一个发布者
初始化ROS节点
创建句柄
向ROS Master注册节点信息,包括发布的话题名和话题中的消息类型以及队列长度
创建并且初始化消息数据
按照一定频率循环发送消息/** * 在功能包learn_topic的src文件夹,创建一个C++文件(文件后缀为.cpp),命名为turtle_velocity_publisher.cpp * 创建一个小海龟的速度发布者 */ #include <ros/ros.h> #include <geometry_msgs/Twist.h> int main(int argc, char **argv) { ros::init(argc, argv, "turtle_velocity_publisher");//ROS节点初始化 ros::NodeHandle n;//这里是创建句柄 //创建一个Publisher,发布名为/turtle1/cmd_vel的topic,消息类型为geometry_msgs::Twist,队列长度10 ros::Publisher turtle_vel_pub = n.advertise<geometry_msgs::Twist> ("/turtle1/cmd_vel", 10); ros::Rate loop_rate(10);//设置循环的频率 while (ros::ok()) { //初始化需要发布的消息,类型需与Publisher一致 geometry_msgs::Twist turtle_vel_msg; turtle_vel_msg.linear.x = 0.8; turtle_vel_msg.angular.z = 0.6; turtle_vel_pub.publish(turtle_vel_msg);// 发布速度消息 //打印发布的速度内容 ROS_INFO("Publsh turtle velocity command[%0.2f m/s, %0.2f rad/s]", turtle_vel_msg.linear.x, turtle_vel_msg.angular.z); loop_rate.sleep();//按照循环频率延时 } return 0; } -
修改CMakelist.txt
add_executable(turtle_velocity_publisher src/turtle_velocity_publisher.cpp) target_link_libraries(turtle_velocity_publisher ${catkin_LIBRARIES}) -
编译运行
cd ~/ros_ws catkin_make cd ~/ros_ws source devel/setup.bash roscore rosrun turtlesim turtlesim_node rosrun learn_topic turtle_velocity_publisher rosnode list -
Python版本
# 在功能包learn_topic下的scripts文件夹下新建一个python文件(文件后缀.py),命名为turtle_velocity_publisher.py,把下边的程序代码复制粘贴到turtle_velocity_publisher.py文件中, #!/usr/bin/env python # -*- coding: utf-8 -*- # 该例程将发布turtle1/cmd_vel话题,消息类型geometry_msgs::Twist import rospy from geometry_msgs.msg import Twist def turtle_velocity_publisher(): rospy.init_node('turtle_velocity_publisher', anonymous=True) # ROS节点初始化 # 创建一个小海龟速度发布者,发布名为/turtle1/cmd_vel的topic,消息类型为geometry_msgs::Twist,8代表消息队列长度 turtle_vel_pub = rospy.Publisher('/turtle1/cmd_vel', Twist, queue_size=8) rate = rospy.Rate(10) #设置循环的频率 while not rospy.is_shutdown(): # 初始化geometry_msgs::Twist类型的消息 turtle_vel_msg = Twist() turtle_vel_msg.linear.x = 0.8 turtle_vel_msg.angular.z = 0.6 # 发布消息 turtle_vel_pub.publish(turtle_vel_msg) rospy.loginfo("linear is :%0.2f m/s, angular is :%0.2f rad/s", turtle_vel_msg.linear.x, turtle_vel_msg.angular.z) rate.sleep()# 按照循环频率延时 if __name__ == '__main__': try: turtle_velocity_publisher() except rospy.ROSInterruptException: pass -
运行
# python程序不需要编译,但是需要添加可执行的权限,终端输入, cd ~/ros_ws/src/learn_topic/scripts sudo chmod a+x turtle_velocity_publisher.py roscore rosrun turtlesim turtlesim_node rosrun learn_topic turtle_velocity_publisher.py
ROS 话题订阅
-
创建一个订阅者
初始化ROS节点
创建句柄
订阅需要的话题
循环等待话题消息,接收到消息后进入回调函数
在回调函数中完成消息处理// 在功能包learn_topic的src文件夹,创建一个C++文件(文件后缀为.cpp),命名为turtle_pose_subscriber.cpp /*创建一个小海龟的当前位姿信息接收*/ #include <ros/ros.h> #include "turtlesim/Pose.h" // 接收消息后,会进入消息回调函数,回调函数里边会对接收到的数据进行处理 void turtle_poseCallback(const turtlesim::Pose::ConstPtr& msg) { // 打印接收到的消息 ROS_INFO("Turtle pose: x:%0.3f, y:%0.3f", msg->x, msg->y); } int main(int argc, char **argv) { ros::init(argc, argv, "turtle_pose_subscriber");// 初始化ROS节点 ros::NodeHandle n;//这里是创建句柄 // 创建一个订阅者,订阅的话题是/turtle1/pose的topic,poseCallback是回调函数 ros::Subscriber pose_sub = n.subscribe("/turtle1/pose", 10,turtle_poseCallback); ros::spin(); // 循环等待回调函数 return 0; } -
修改CMakelist.txt
# 在CMakelist.txt中配置,build区域下,添加如下内容, # add_executable说明了生成的可执行程序的文件是turtle_pose_subscriber,编译的源码是src目录下的turtle_pose_subscriber.cpp。 # target_link_libraries说明了编译生成可执行文件是需要链接的库。 add_executable(turtle_pose_subscriber src/turtle_pose_subscriber.cpp) target_link_libraries(turtle_pose_subscriber ${catkin_LIBRARIES}) -
运行
cd ~/ros_ws catkin_make cd ~/ros_ws source devel/setup.bash roscore rosrun turtlesim turtlesim_node rosrun turtlesim turtle_teleop_key rosrun learn_topic turtle_pose_subscriber # 我们可以通过rqt_graph工具来查看节点之间的通讯,终端输入, rqt_graph # 椭圆里边代表的是节点名称,矩形里边表示的是话题名称,箭头表示话题消息传递的方向,我们编写的订阅者节点程序turtle_pose_subscriber就是订阅了/turtle1/pose的话题消息,这一点与代码ros::Subscriber pose_sub = n.subscribe("/turtle1/pose", 10,turtle_poseCallback);
ROS 服务客户端
服务service同样也是ros节点之间一种比较常用的通讯方式,与话题不一样的是,服务有服务端和客户端,客户端请求服务端提供服务,服务端服务完,需要返回服务的结果,也称回应。我们本节课程来说明,怎么写一个客户端节点程序。
-
创建功能包
# 为了与learn_topic功能包区别开来,我们重新创建一个功能包learn_service,终端输入, cd ~/ros_ws/src catkin_create_pkg learn_service std_msgs rospy roscpp geometry_msgs turtlesim -
创建一个客户端
初始化ROS节点
创建句柄
创建一个Client实例
初始化并发布服务请求数据
等待Server处理之后的应答结果/** * 在功能包learn_service的src文件夹,创建一个C++文件(文件后缀为.cpp),命名为a_new_turtle.cpp * 该例程将请求小海龟节点里的/spawn服务,会在规定的位置出现一只新的小海龟 */ #include <ros/ros.h> #include <turtlesim/Spawn.h> int main(int argc, char** argv) { ros::init(argc, argv, "a_nes_turtle");// 初始化ROS节点 ros::NodeHandle node; ros::service::waitForService("/spawn"); // 等待/spawn服务 ros::ServiceClient new_turtle = node.serviceClient<turtlesim::Spawn>("/spawn");//创建一个服务客户端,连接名为/spawn的服务 // 初始化turtlesim::Spawn的请求数据 turtlesim::Spawn new_turtle_srv; new_turtle_srv.request.x = 6.0; new_turtle_srv.request.y = 8.0; new_turtle_srv.request.name = "turtle2"; // 请求服务传入xy位置参数以及名字参数 ROS_INFO("Call service to create a new turtle name is %s,at the x:%.1f,y:%.1f", new_turtle_srv.request.name.c_str(), new_turtle_srv.request.x,new_turtle_srv.request.y); new_turtle.call(new_turtle_srv); //请求服务 ROS_INFO("Spwan turtle successfully [name:%s]", new_turtle_srv.response.name.c_str());// 显示服务调用结果 return 0; };# 在启动小海龟的节点后,再运行a_new_turtle这个程序会发现,画面中会出现另外一直小海龟,这是因为小海龟的节点提供了服务/spawn,对应的是代码中的ros::ServiceClient new_turtle = node.serviceClient<turtlesim::Spawn>("/spawn");//创建该服务会产生另外一直小海龟turtle2,查看小海龟提供的服务可以通过rosservice list命令来查看,如下图所示, # 可以通过rosservice info /spawn,查看这个服务需要的参数 # 可以看出需要有4个参数:x,y,theta,name,这四个参数在a_new_turtle.cpp里边有初始化, srv.request.x = 6.0; srv.request.y = 8.0; srv.request.name = "turtle2"; 注意:theta没有赋值,默认为0
ROS服务服务端
上节教程我们讲述了如何写一个客户端节点程序,那本节课程序来说明如何写一个服务端的节点。服务端有一个服务的回调函数,可以类比为话题订阅者的回调函数。接收到请求服务后,在服务的回调函数里,说明具体的服务内容,然后返回一个响应值。
-
创建一个服务端
初始化ROS节点
创建Server实例
循环等待服务请求,进入回调函数
在回调函数中完成服务的功能处理,并且反馈应答数据/** * 在功能包learn_server的src文件夹,创建一个C++文件(文件后缀为.cpp),命名turtle_vel_command_server.cpp * 该例程将执行/turtle_vel_command服务,服务数据类型std_srvs/Trigger */ #include <ros/ros.h> #include <geometry_msgs/Twist.h> #include <std_srvs/Trigger.h> ros::Publisher turtle_vel_pub; bool pubvel = false; // service回调函数,输入参数req,输出参数res bool pubvelCallback(std_srvs::Trigger::Request &req, std_srvs::Trigger::Response &res) { pubvel = !pubvel; ROS_INFO("Do you want to publish the vel?: [%s]", pubvel==true?"Yes":"No");// 打印客户端请求数据 // 设置反馈数据 res.success = true; res.message = "The status is changed!"; return true; } int main(int argc, char **argv) { ros::init(argc, argv, "turtle_vel_command_server"); ros::NodeHandle n; // 创建一个名为/turtle_vel_command的server,注册回调函数pubvelCallback ros::ServiceServer command_service = n.advertiseService("/turtle_vel_command", pubvelCallback); // 创建一个Publisher,发布名为/turtle1/cmd_vel的topic,消息类型为geometry_msgs::Twist,队列长度8 turtle_vel_pub = n.advertise<geometry_msgs::Twist>("/turtle1/cmd_vel", 8); ros::Rate loop_rate(10);// 设置循环的频率 while(ros::ok()) { ros::spinOnce();// 查看一次回调函数队列 // 判断pubvel为True,则发布小海龟速度指令 if(pubvel) { geometry_msgs::Twist vel_msg; vel_msg.linear.x = 0.6; vel_msg.angular.z = 0.8; turtle_vel_pub.publish(vel_msg); } loop_rate.sleep();//按照循环频率延时 } return 0; } -
运行
roscore rosrun turtlesim turtlesim_node # 运行服务端节点, rosrun learn_service turtle_vel_command_server # 调用服务, rosservice call /turtle_vel_command程序运行说明:
首先,运行小海龟这个节点后,可以在终端输入rosservice list,查看当前的服务有哪些
然后,我们再运行turtle_vel_command_server程序,再输入rosservice list,会发现多了个turtle_vel_command,
然后,我们通过在终端输入rosservice call /turtle_vel_command调用这个服务,会发现小海龟做圆周运动,再次调用服务的话,小海龟停止了运动。这是因为在服务回调函数里边,我们把pubvel的值做了反转,然后反馈回去,主函数就会判断pubvel的值,如果是True就发布速度指令,为False则不发布指令。
ROS动作客户端
动作action是ros常用的一种通讯方式,有动作的客户端client与动作的服务端server。这里要提一下action与servcie都是具有反馈的通讯方式,那么它们之间有什么区别呢?很明显的一个区别就是,action可以按照一定的频率进行反馈当前的状态,而service只能够反馈一次,这是个很重要的点,比如在执行长时间任务的时候,用action的通信方式可以随时的查看进度,同时也可以终止请求。
action通信原理
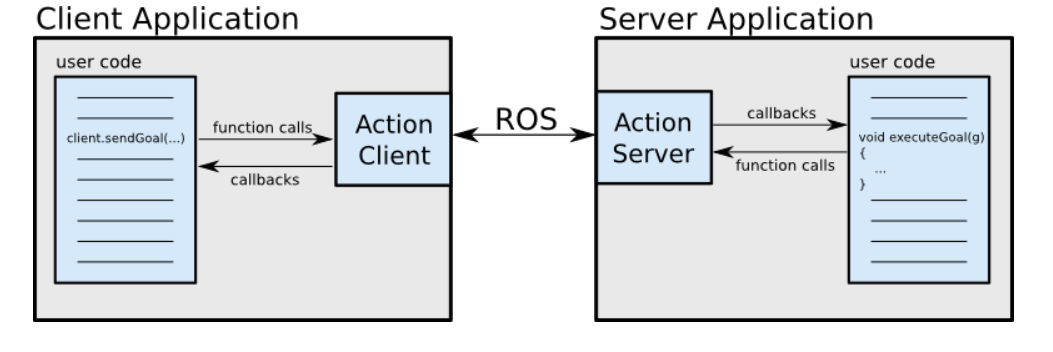
我们看下ros-wiki的图
这里显示了client发送一个目标,也就是sendGoal,server接收到后执行相对应的程序,也就是excuteGoal。这是一个简单过程,但是其中,还有可能client按照设定的频率发送反馈的指令,server接收到后把反馈的结果发回给client。
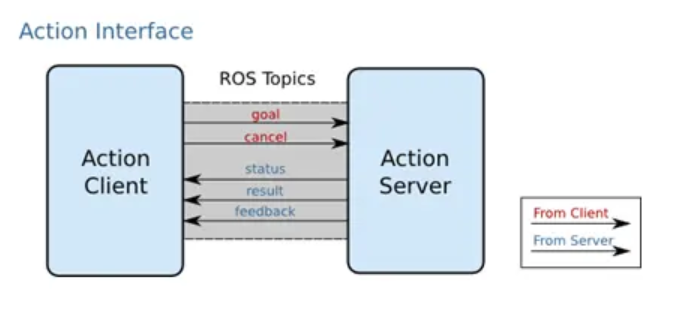
这里有几个重要的概念需要知道:目标goal:机器人执行一个动作,应该有明确的移动目标信息,告诉服务端"我想去哪里"或者是"我想做什么",包括一些参数的设定,方向、角度、速度等等。从而使机器人完成动作任务。
反馈feedback:在动作进行的过程中,服务端应该把实时的状态信息反馈给客户端,告诉客户端动"现在进行到哪里了"或者是"我做到哪里了",也方便客户端是否选择继续或者其它的一下指令。
结果result:当运动完成时,服务端把结果数据发送给客户端,告诉客户端"我现在已经到了"或者是"我现在完成了动作",使客户端得到本次动作的全部信息,例如可能包含机器人的运动时长,最终姿势等等。
.action文件
# 行为规范使用.action文件。.action文件有目标goal定义,然后是结果result定义,然后是反馈feedback定义 # 每个部分用3个连字符(---)分隔。在工作空间的src目录下,新建一个learn_action功能包,输入以下指令, catkin_create_pkg learn_action std_msgs rospy roscpp actionlib actionlib_msgs # 然后回到工作空间进行编译, cd ~/ros_ws catkin_make # 然后在learn_action文件夹下,新建一个文件夹,命名为action,用于存放我们定义的.action文件,终端输入, cd ~/ros_ws/src/learn_action mkdir action # 在action文件夹下,新建一个文件,命名为DoDishes.action,把以下代码,复制到里边, # Define the goal uint32 dishwasher_id # Specify which dishwasher we want to use --- # Define the result uint32 total_dishes_cleaned --- # Define a feedback message float32 percent_complete
# 修改CMakeLists.txt文件,修改成以下内容, find_package(catkin REQUIRED COMPONENTS actionlib actionlib_msgs roscpp rospy std_msgs genmsg ) add_action_files( DIRECTORY action FILES DoDishes.action ) generate_messages( DEPENDENCIES actionlib_msgs )
# 回到工作空间编译一下,终端输入, cd ~/ros_ws catkin_make # 成功编译后,对于DoDishes.action,以下消息通过genaction.py生成相关的msg文件,通过rosmsg list可以看到learn_action相关的即是 rosmsg list
-
编写action客户端代码
// 在learn_action功能包下,新建一个文件,命名为action_client.cpp,把以下内容复制到里边, #include <actionlib/client/simple_action_client.h> #include "learn_action/DoDishesAction.h" typedef actionlib::SimpleActionClient<learn_action::DoDishesAction> Client; // 当action完成后会调用次回调函数一次 void doneCb(const actionlib::SimpleClientGoalState& state, const learn_action::DoDishesResultConstPtr& result) { ROS_INFO("Yay! The dishes are now clean"); ros::shutdown(); } // 当action激活后会调用次回调函数一次 void activeCb() { ROS_INFO("Goal just went active"); } // 收到feedback后调用的回调函数, 这里说明feedback的成员percen_complete, // 我们可以通过rosmsg info来查询具体的成员有哪些rosmsg info learn_action/DoDishesFeedback // 包括上边的goal也一样,终端输入,rosmsg info learn_action/DoDishesGoal void feedbackCb(const learn_action::DoDishesFeedbackConstPtr& feedback) { ROS_INFO(" percent_complete : %f ", feedback->percent_complete); } int main(int argc, char** argv) { ros::init(argc, argv, "do_dishes_client"); // 定义一个客户端, 有两个信息,第一个是客户端寻求的服务是“do_dishes”,第二个是true表示启动一个线程来为此操作的订阅提供服务。 Client client("do_dishes", true); // 等待服务器端.等待"do_dishes"服务启动 ROS_INFO("Waiting for action server to start."); client.waitForServer(); ROS_INFO("Action server started, sending goal."); // 创建一个action的goal,goal有个成员是dishwasher_id,给它赋值成1,然后sendGoal发送目标给服务端。 // 里边包括了goal,还有三个回调函数,分别是doneCb、activeCb和feedbackCb。 learn_action::DoDishesGoal goal; goal.dishwasher_id = 1; // 发送action的goal给服务器端,并且设置回调函数 client.sendGoal(goal, &doneCb, &activeCb, &feedbackCb); ros::spin(); return 0; }# 修改CMakeLists.txt文件,添加以下内容 add_executable(action_client src/action_client.cpp) target_link_libraries( action_client ${catkin_LIBRARIES}) add_dependencies(action_client ${${PROJECT_NAME}_EXPORTED_TARGETS})# 回到工作空间编译, cd ~/ros_ws catkin_make roscore # 编译完成后,重新打开终端或者source一下,然后输入以下指令运行, rosrun learn_action action_client
ROS动作服务端
-
编写action客户端代码
// 在learn_action功能包下,新建一个文件,命名为action_server.cpp,把以下内容复制到里边, #include <ros/ros.h> #include <actionlib/server/simple_action_server.h> #include "learn_action/DoDishesAction.h" typedef actionlib::SimpleActionServer<learn_action::DoDishesAction> Server; // 收到action的goal后调用的回调函数 void execute(const learn_action::DoDishesGoalConstPtr& goal, Server* as) { ros::Rate r(1); learn_action::DoDishesFeedback feedback; ROS_INFO("Dishwasher %d is working.", goal->dishwasher_id); // 假设洗盘子的进度,并且按照1hz的频率发布进度feedback for(int i=1; i<=10; i++) { feedback.percent_complete = i * 10; as->publishFeedback(feedback); // 把反馈发布回去给客户端,客户端收到后,就会执行feedbackCb函数里边的内容; r.sleep(); } // 当action完成后,向客户端返回结果 ROS_INFO("Dishwasher %d finish working.", goal->dishwasher_id); as->setSucceeded(); // 将活动目标的状态设置为成功。然后客户端接收到,就会执行doneCb函数里边的内容。 } int main(int argc, char** argv) { ros::init(argc, argv, "do_dishes_server"); ros::NodeHandle n; // 定义一个服务器 Server server(n, "do_dishes", boost::bind(&execute, _1, &server), false); // 服务器开始运行 server.start(); ros::spin(); return 0; }# 修改CMakeLists.txt文件,添加以下内容, add_executable(action_server src/action_server.cpp) target_link_libraries( action_server ${catkin_LIBRARIES}) add_dependencies(action_server ${${PROJECT_NAME}_EXPORTED_TARGETS})# 结合上节编写的客户端程序,看一下整个DoDishes是怎么运行,首先依然是要先启动roscore,终端输入, roscore # 运行action客户端程序, rosrun learn_action action_client # 运行action服务端程序, rosrun learn_action action_server # 程序启动后,客户端会按照一点的频率打印服务端发送回去的反馈信息,直到100后,整个动作完成了,显示“Yay!The dishes are now clean”,届时,服务端也会打印“Dishwasher 1 finishing working.”。
自定义话题消息类型
-
ROS自定义接口消息
# 在learn_topic功能包的目录下,新建一个文件夹msg cd ~/ros_ws/src/learn_topic mkdir msg # 切换至msg目录下,新建一个空白的msg文件,以msg为后缀表示代表是msg文件。这里我们以Information.msg为例子说明下 string company string city # 在package.xml中添加功能包依赖 <build_depend>message_generation</build_depend> <exec_depend>message_runtime</exec_depend> # 在CMakeLists.txt添加编译选项->在find_package里边加上message_generation add_message_files(FILES Information.msg) generate_messages(DEPENDENCIES std_msgs) # 编译文件 cd ~/ros_ws catkin_make # 编译完成后,查询自定义的消息类型 rosmsg show learn_topic/Information -
C++程序使用自定义话题消息类型
我们写一个发布者和一个订阅者来使用自定义的话题消息,在功能包learn_topic的src目录下新建两个文件,分别命令为Information_publisher.cpp和Information_subscriber.cpp,把以下代码分别复制到里边去,
/** * Information_publisher.cpp * 该例程将发布/company_info话题,消息类型是自定义的learn_topic::Information */ #include <ros/ros.h> #include "learn_topic/Information.h" int main(int argc, char **argv) { // ROS节点初始化 ros::init(argc, argv, "company_Information_publisher"); // 创建节点句柄 ros::NodeHandle n; // 创建一个Publisher,发布名为/company_info的topic,消息类型为learn_topic::Person,队列长度10 ros::Publisher Information_pub = n.advertise<learn_topic::Information>("/company_info", 10); // 设置循环的频率 ros::Rate loop_rate(1); int count = 0; while (ros::ok()) { // 初始化learn_topic::Information类型的消息 learn_topic::Information info_msg; info_msg.company = "Yahboom"; info_msg.city = "Shenzhen"; // 发布消息 Information_pub.publish(info_msg); ROS_INFO("Information: company:%s city:%s ",info_msg.company.c_str(), info_msg.city.c_str()); loop_rate.sleep();// 按照循环频率延时 } return 0; }/** * Information_subscriber.cpp * 该例程将订阅/company_info话题,自定义消息类型learn_topic::Information */ #include <ros/ros.h> #include "learn_topic/Information.h" // 接收到订阅的消息后,会进入消息回调函数处理数据 void CompanyInfoCallback(const learn_topic::Information::ConstPtr& msg) { // 打印接收到的消息 ROS_INFO("This is: %s in %s", msg->company.c_str(), msg->city.c_str()); } int main(int argc, char **argv) { ros::init(argc, argv, "company_Information_subscriber");// 初始化ROS节点 ros::NodeHandle n;// 这里是创建节点句柄 // 创建一个Subscriber,订阅名话题/company_info的topic,注册回调函数CompanyInfoCallback ros::Subscriber person_info_sub = n.subscribe("/company_info", 10,CompanyInfoCallback); ros::spin();// 循环等待回调函数 return 0; }# 修改CMakeLists.txt文件 add_executable(Information_publisher src/Information_publisher.cpp) target_link_libraries(Information_publisher ${catkin_LIBRARIES}) add_dependencies(Information_publisher ${PROJECT_NAME}_generate_messages_cpp) add_executable(Information_subscriber src/Information_subscriber.cpp) target_link_libraries(Information_subscriber ${catkin_LIBRARIES}) add_dependencies(Information_subscriber ${PROJECT_NAME}_generate_messages_cpp)# 编译功能包 cd ~/ros_ws catkin_make #编译通过后,重新打开两个终端,分别运行Information_publisher 和 Information_subscriber ,先启动roscore roscore # 另开一个终端 rosrun learn_topic Information_publisher # 另开一个终端 rosrun learn_topic Information_subscriber
自定义服务消息与使用
-
创建消息
# 在learn_service功能包的目录下,新建一个文件夹srv cd ~/ros_ws/src/learn_service mkdir srv # 切换至srv目录下,新建一个空白的srv文件,以srv为后缀表示代表是srv文件。这里我们以IntPlus.srv为例子说明下 # 这里说明下srv文件的构成,由符号---分为上下两个部分,上边表示request下边是response uint8 a uint8 b --- uint8 result# 在package.xml中添加功能包依赖 <build_depend>message_generation</build_depend> <exec_depend>message_runtime</exec_depend># 在CMakeList.txt添加编译选项 #在find_package里边加上message_generation add_service_files(FILES IntPlus.srv) generate_messages(DEPENDENCIES std_msgs)cd ~/ros_ws catkin_make # 编译成功后,终端输入以下指令查询是否生成了自定义的服务消息 rossrv show learn_service/IntPlus -
C++程序使用自定义话题消息类型
在功能包learn_service的src目录下新建两个文件,分别命令为IntPlus_client.cpp和IntPlus_server.cpp
/* * IntPlus_client.cpp * 该例程将请求/Two_Int_Plus服务,服务数据类型learn_service::IntPlus, 两个整型数相加求和 */ #include <ros/ros.h> #include "learn_service/IntPlus.h" #include <iostream> using namespace std; int main(int argc, char** argv) { int i,k; cin>>i; cin>>k; ros::init(argc, argv, "IntPlus_client");// 初始化ROS节点 ros::NodeHandle node;// 创建节点句柄 // 发现/Two_Int_Plus服务后,创建一个服务客户端 ros::service::waitForService("/Two_Int_Plus"); ros::ServiceClient IntPlus_client = node.serviceClient<learn_service::IntPlus>("/Two_Int_Plus"); // 初始化learn_service::IntPlus的请求数据 learn_service::IntPlus srv; srv.request.a = i; srv.request.b = k; ROS_INFO("Call service to plus %d and %d", srv.request.a, srv.request.b);//请求服务调用 IntPlus_client.call(srv); // 显示服务调用结果 ROS_INFO("Show the result : %d", srv.response.result);// 显示服务调用结果 return 0; }/** * IntPlus_server.cpp * 该例程将执行/Two_Int_Plus服务,服务数据类型learn_service::IntPlus */ #include <ros/ros.h> #include "learn_service/IntPlus.h" // service回调函数,输入参数req,输出参数res bool IntPlusCallback(learn_service::IntPlus::Request &req,learn_service::IntPlus::Response &res) { ROS_INFO("number 1 is:%d ,number 2 is:%d ", req.a, req.b);// 显示请求数据 res.result = req.a + req.b ;// 反馈结果为两数之和 return res.result; } int main(int argc, char **argv) { ros::init(argc, argv, "IntPlus_server"); // ROS节点初始化 ros::NodeHandle n;// 创建节点句柄 // 创建一个server,注册回调函数IntPlusCallback ros::ServiceServer Int_Plus_service = n.advertiseService("/Two_Int_Plus",IntPlusCallback); // 循环等待回调函数 ROS_INFO("Ready to caculate."); ros::spin(); return 0; } ``` # 修改CMakeLists.txt文件 add_executable(IntPlus_server src/IntPlus_server.cpp) target_link_libraries(IntPlus_server ${catkin_LIBRARIES}) add_dependencies(IntPlus_server ${PROJECT_NAME}_generate_messages_cpp) add_executable(IntPlus_client src/IntPlus_client.cpp) target_link_libraries(IntPlus_client ${catkin_LIBRARIES}) add_dependencies(IntPlus_client ${PROJECT_NAME}_generate_messages_cpp)cd ~/ros_ws catkin_make roscore # 新建终端 rosrun learn_service IntPlus_server # 新建终端 rosrun learn_service IntPlus_client # client终端输入两个数字,空格间隔,回车完成