文章目录
- [1. 神经网络](#1. 神经网络)
-
- [1.1 AlexNet网络](#1.1 AlexNet网络)
- [1.2 VGGNet](#1.2 VGGNet)
- [1.3 GoogleNet](#1.3 GoogleNet)
- [1.4 ResNet](#1.4 ResNet)
- [2. 循环神经网络(RNN,Recurrent Neural Network)](#2. 循环神经网络(RNN,Recurrent Neural Network))
-
- [2.1 结构](#2.1 结构)
- [2.2 现有CNN的局限性](#2.2 现有CNN的局限性)
- [2.3 RNN的结构](#2.3 RNN的结构)
- [2.4 RNN 隐藏状态的更新](#2.4 RNN 隐藏状态的更新)
- [2.5 RNN 的输出](#2.5 RNN 的输出)
- [2.6 最基础的 RNN(vanilla RNN / Elman RNN)](#2.6 最基础的 RNN(vanilla RNN / Elman RNN))
- [2.7 结构拓展](#2.7 结构拓展)
-
- [2.7.1 Sequence-to-Sequence(Seq2Seq)模型](#2.7.1 Sequence-to-Sequence(Seq2Seq)模型)
- [2.8 RNN应用](#2.8 RNN应用)
- [2.9 RNN的训练方式](#2.9 RNN的训练方式)
-
- [2.9.1 截断时间反向传播(Truncated Backpropagation Through Time,TBPTT)](#2.9.1 截断时间反向传播(Truncated Backpropagation Through Time,TBPTT))
- [2.10 RNN 总结](#2.10 RNN 总结)
- [2.11 更多应用](#2.11 更多应用)
-
- [2.11.1 图像字幕生成(Image Captioning)模型](#2.11.1 图像字幕生成(Image Captioning)模型)
- [2.11.2 带注意力机制的图像描述(Image Captioning with Attention)](#2.11.2 带注意力机制的图像描述(Image Captioning with Attention))
- [3. LSTM(Long Short-Term Memory,长短期记忆网络)](#3. LSTM(Long Short-Term Memory,长短期记忆网络))
-
- [3.1 梯度消失](#3.1 梯度消失)
- [3.2 LSTM 的结构](#3.2 LSTM 的结构)
- [4. MLLMs(Multimodal Large Language Models,多模态大语言模型)](#4. MLLMs(Multimodal Large Language Models,多模态大语言模型))
1. 神经网络
我们之前提到过神经网络,而且别的课程中也对神经网络进行了系统的学习。
我们再回顾一下一些著名的神经网络模型。
1.1 AlexNet网络
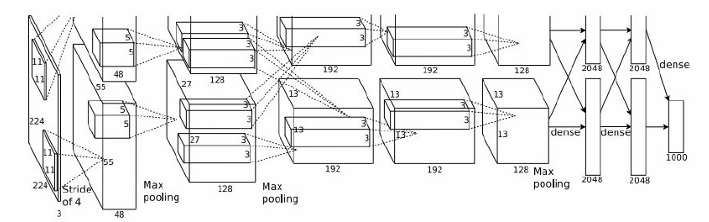
卷积层(CONV1-CONV5):
CONV1:使用96个11x11的卷积核,步长为4,没有填充(pad 0),输出特征图尺寸为55x55x96。
POOL1:使用3x3的最大池化(Max pooling),步长为2,输出特征图尺寸为27x27x96。
NORM1:归一化层,用于标准化特征图。
CONV2:使用256个5x5的卷积核,步长为1,填充为2(pad 2),输出特征图尺寸为27x27x256。
POOL2:使用3x3的最大池化,步长为2,输出特征图尺寸为13x13x256。
NORM2:归一化层。
CONV3:使用384个3x3的卷积核,步长为1,填充为1(pad 1),输出特征图尺寸为13x13x384。
CONV4:使用384个3x3的卷积核,步长为1,填充为1(pad 1),输出特征图尺寸为13x13x384。
CONV5:使用256个3x3的卷积核,步长为1,填充为1(pad 1),输出特征图尺寸为13x13x256。
POOL3:使用3x3的最大池化,步长为2,输出特征图尺寸为6x6x256。
全连接层(FC6-FC8):
FC6:4096个神经元的全连接层。
FC7:4096个神经元的全连接层。
FC8:1000个神经元的全连接层,用于输出类别分数。
细节:
AlexNet是第一个使用ReLU激活函数的网络。
使用了归一化层(Norm layers),这在当时并不常见。
进行了大量数据增强(Heavy data augmentation)。
使用了Dropout 0.5来防止过拟合。
批量大小(Batch size)为128。
使用了SGD动量(SGD Momentum)0.9。
学习率(Learning rate)初始为1e-2,每10个epoch减少10倍。
当验证准确率(val accuracy)稳定时手动调整学习率。
L2权重衰减(L2 weight decay)5e-4。
使用了7个CNN集成(ensemble)来提高性能,前5错误率从18.2%降低到15.4%。
1.2 VGGNet
VGGNet是由Simonyan和Zisserman在2014年提出的一种深度卷积神经网络(CNN)架构。
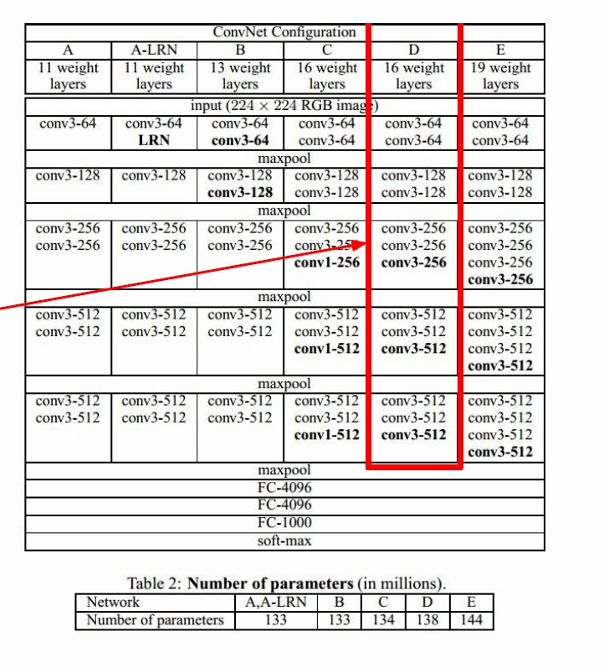
VGGNet只使用3x3的卷积核,步长为1,填充为1(pad 1)。
使用2x2的最大池化(Max Pooling),步长为2。
图中用红色框标出了VGGNet的"最佳模型"配置,即配置E。
配置E包含19个权重层,是所有配置中层数最多的。
在ILSVRC 2013(ImageNet Large Scale Visual Recognition Challenge 2013)数据集上,最佳模型的前5错误率为11.2%。
进一步优化后,错误率可以降低到7.3%。
1.3 GoogleNet
这是由Szegedy等人在2014年提出的一种深度卷积神经网络(CNN)架构。GoogLeNet在ILSVRC 2014(ImageNet Large Scale Visual Recognition Challenge)比赛中取得了优异的成绩,其top-5错误率为6.7%。
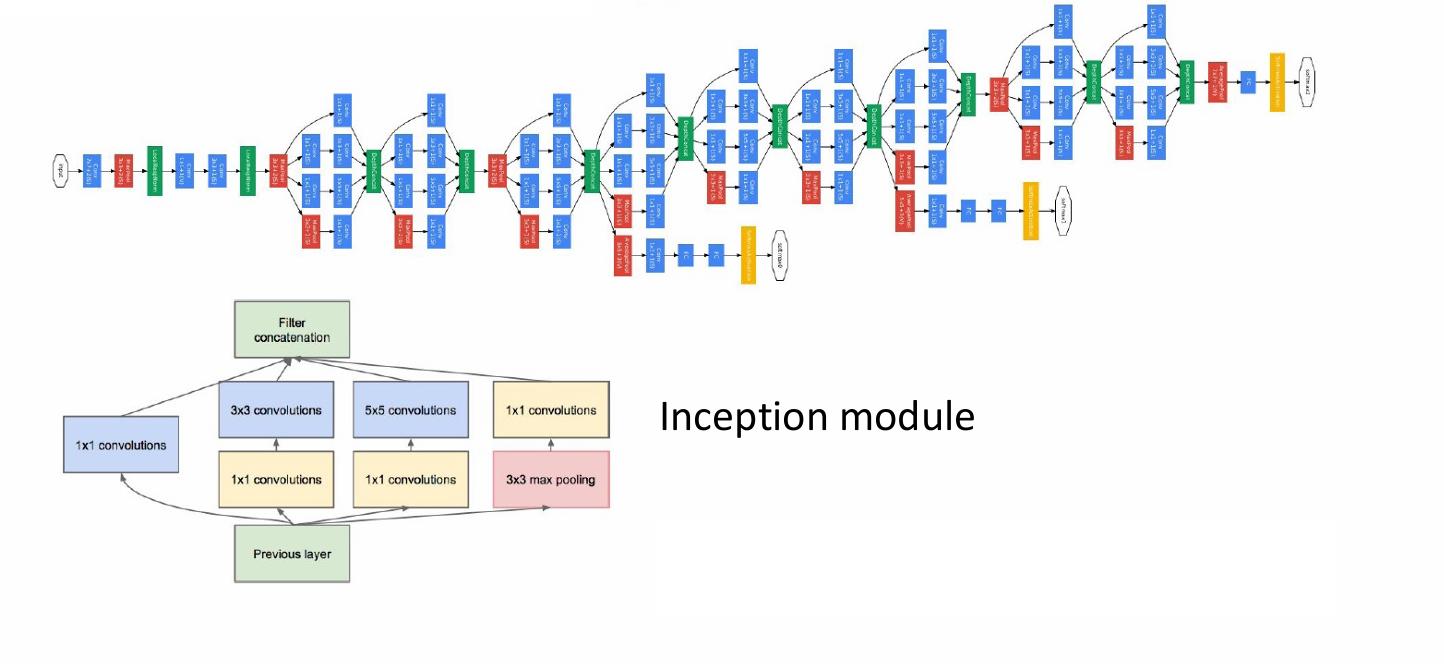
GoogLeNet由多个Inception模块堆叠而成,每个模块后通常跟随一个池化层。
Inception模块通过并行执行不同大小的卷积操作来捕获图像中的多尺度特征。
模块包括1x1、3x3和5x5的卷积操作,以及一个3x3的最大池化操作。这些操作的输出被连接(concatenated)在一起,形成模块的输出。
GoogLeNet的一个重要特性是它只有500万个参数,这比当时的其他网络少得多。
它完全去除了全连接层(FC layers),通过使用Inception模块来减少参数数量。
与AlexNet的比较:
GoogLeNet的参数数量比AlexNet少12倍。
计算量是AlexNet的两倍。
在ImageNet数据集上的top-5错误率比AlexNet低(6.67% vs. 15.4%)。
1.4 ResNet
由He等人在2015年提出。ResNet在ILSVRC 2015(ImageNet Large Scale Visual Recognition Challenge)比赛中取得了冠军,其top-5错误率为3.6%。
ResNet通过引入残差学习(residual learning)的概念,解决了深度网络训练中的退化问题,使得构建更深的网络成为可能,从而在多个视觉任务中取得了显著的性能提升。
下图中列出了从2010年到2015年的几个主要CNN架构及其在top-5错误率(即前5个预测中正确分类的比例)上的表现。
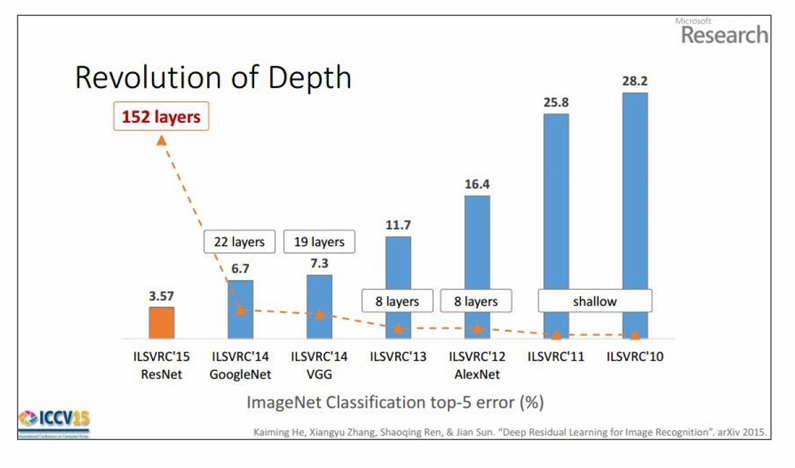
每种架构旁边标注了其层数,例如AlexNet有8层,VGG有19层,GoogLeNet有22层,而ResNet有152层。
随着CNN架构的层数增加,模型在ImageNet分类任务上的性能显著提高,特别是ResNet通过引入残差学习解决了深度网络训练的难题,实现了更低的错误率。
下图显示了不同层数(20层、32层、44层、56层、110层)的ResNet在训练和测试过程中的错误率变化。
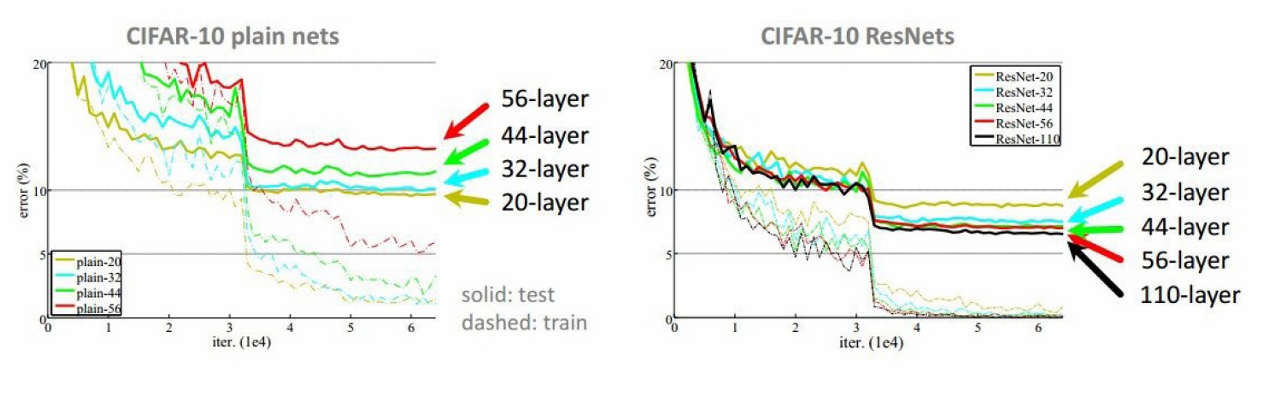
ResNet的错误率明显低于普通网络,特别是在网络层数较多时(例如56层和110层)。
随着层数的增加,ResNet的错误率持续下降,显示出更好的泛化能力和学习能力。
残差网络(ResNet)通过引入残差连接有效地解决了深度网络训练中的退化问题,使得可以构建更深的网络而不会遇到性能瓶颈。
此外esNet可以在2-3周内使用8个GPU机器完成训练。尽管ResNet的层数远多于AlexNet和VGG,但其训练效率仍然很高。这也是因为ResNet的残差连接设计使得网络更容易训练,从而在推理时也更高效。
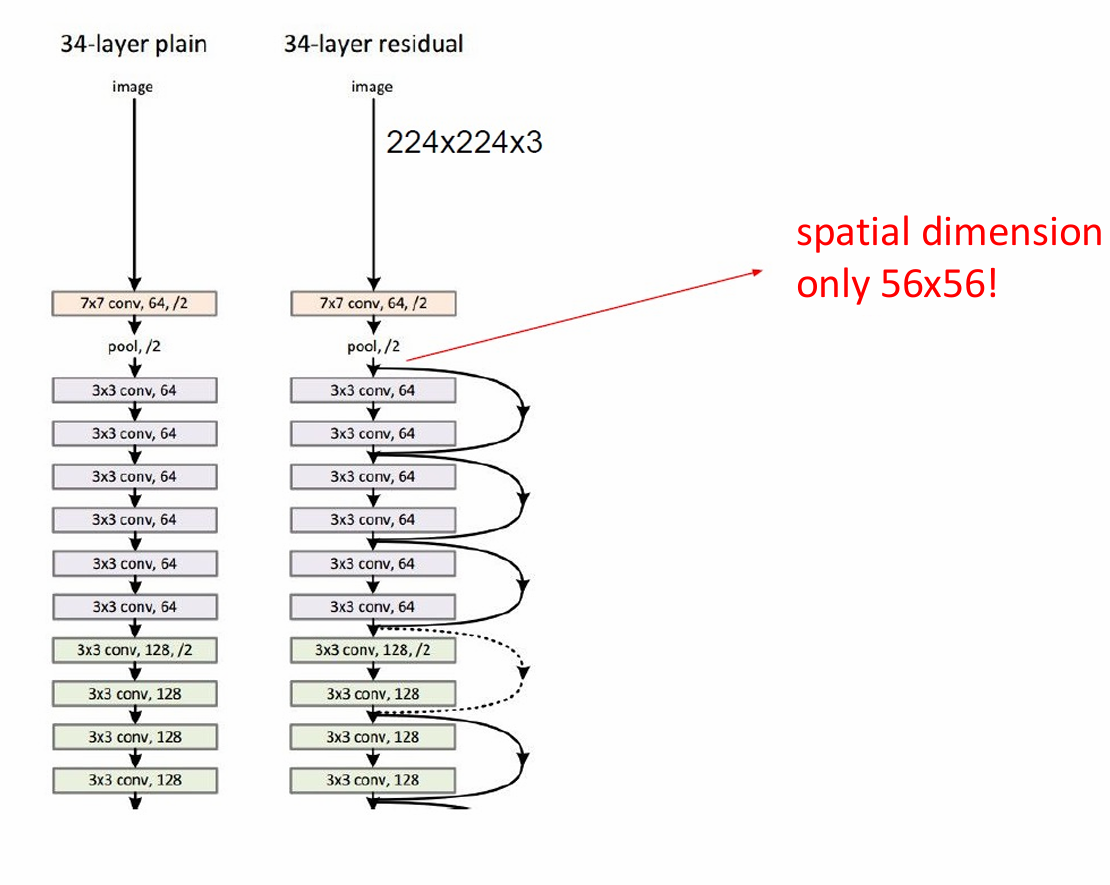
左侧展示了一个34层的普通卷积网络架构。
每一层都包含卷积层(conv)和池化层(pool)。
随着网络深度的增加,特征图的空间维度逐渐减小。
右侧展示了一个34层的残差网络架构。
残差网络通过引入残差连接来解决深度网络中的退化问题,使得网络可以更深。
图中用箭头和虚线表示残差连接,这些连接跳过了一些层,直接将输入传递到后面的层。
尽管网络更深,但空间维度(宽度和高度)仅减小到56x56,而不是像普通网络那样减小到更小的尺寸。
这种设计有助于保留更多的空间信息,从而提高网络的性能。
2. 循环神经网络(RNN,Recurrent Neural Network)
现在进入我们这次的正题------循环神经网络(RNN,Recurrent Neural Network)。
RNN的核心在于其循环结构,它将网络的输出再次输入到网络中,形成一个循环。这种结构使得网络能够利用之前时刻的信息来影响当前时刻的输出,从而捕捉序列中的时间依赖关系。
2.1 结构
RNN有多种架构类型:
一对一(One to One):

这种架构处理固定大小的输入并产生固定大小的输出。例如,图像分类任务,其中输入是一个图像,输出是一个类别标签。
一对多(One to Many):
在这种架构中,单个输入对应一个序列输出。例如,图像字幕生成任务,其中输入是一个图像,输出是一系列单词(即字幕)。
多对一(Many to One):
这种架构处理序列输入并产生单个输出。例如,情感分析任务,其中输入是一个句子,输出是该句子表达的是正面还是负面情感。
动作预测(Action Prediction),其中输入是一系列视频帧,输出是一个动作类别。
多对多(Many to Many):
这种架构处理序列输入并产生序列输出。例如,机器翻译任务,其中输入是一个语言的句子,输出是另一种语言的句子。
视频字幕生成(Video Captioning),其中输入是一系列视频帧,输出是描述视频内容的一系列文字(字幕)。
多对多(Many to Many)同步序列输入和输出:
在这种架构中,输入和输出都是序列,并且它们是同步的。例如,视频分类任务,其中输入是视频的帧序列,输出是每个帧的标签。
2.2 现有CNN的局限性
现有的卷积神经网络(CNN)在处理某些任务时可能不够有效,特别是当涉及到处理具有可变序列长度的输入和输出时。
以视频字幕生成(video captioning)为例,不同的视频可能有不同的长度,即帧数(T Frames)可以变化。因此对于不同的视频,生成的字幕(Output Captions)长度也可能不同,因为每个视频的内容和复杂性不同,需要不同数量的描述来准确传达视频内容。
传统的CNN通常设计为处理固定大小的输入(例如,固定尺寸的图像)。虽然CNN可以通过滑动窗口等技术处理不同大小的图像,但它们在处理序列数据时,尤其是当序列长度变化时,可能会遇到困难。
CNN不自然地处理序列数据,因为它们缺乏内在的机制来处理时间或序列上的依赖关系,这是RNN和LSTM等循环网络所擅长的。
所以我们现在开始讲解RNN的详细结构
2.3 RNN的结构
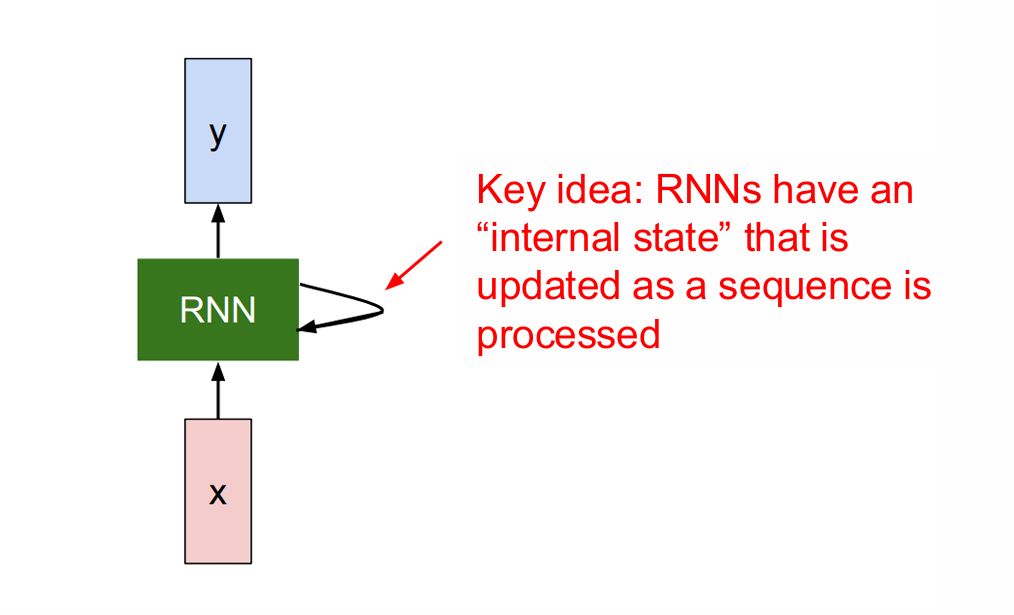
RNN 有一个名为 RNN单元 的核心模块,这个模块在序列中会被反复使用。这里 x 代表某一时刻的输入,y 代表某一时刻的输出。
RNN单元 会把"上一时刻的信息"传给下一时刻自己。这就是所谓的internal state / hidden state。
也就是说 RNN 在处理序列时,会不断更新一个内部状态。
而且它不是每一步一个新网络,而是参数完全共享。
因此 RNN 的本质是:通过隐藏状态在时间维度上传递信息,使模型在当前时刻的输出依赖于过去的输入。
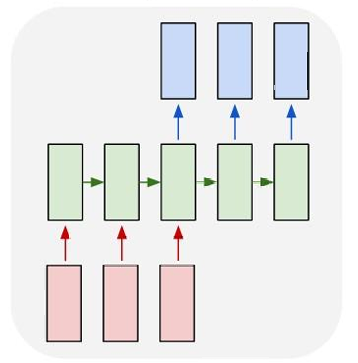
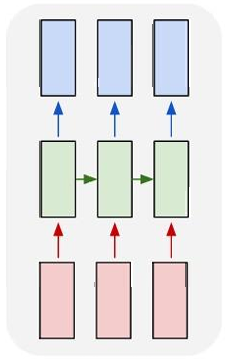
所以 RNN单元 标准图如下。
同一个 RNN单元 在不同时间步被重复使用,用来处理序列中的每一个输入。
在抽象图里,RNN 是一个带回环的方块,看不清时间关系,因此我们现在展开展示一遍。
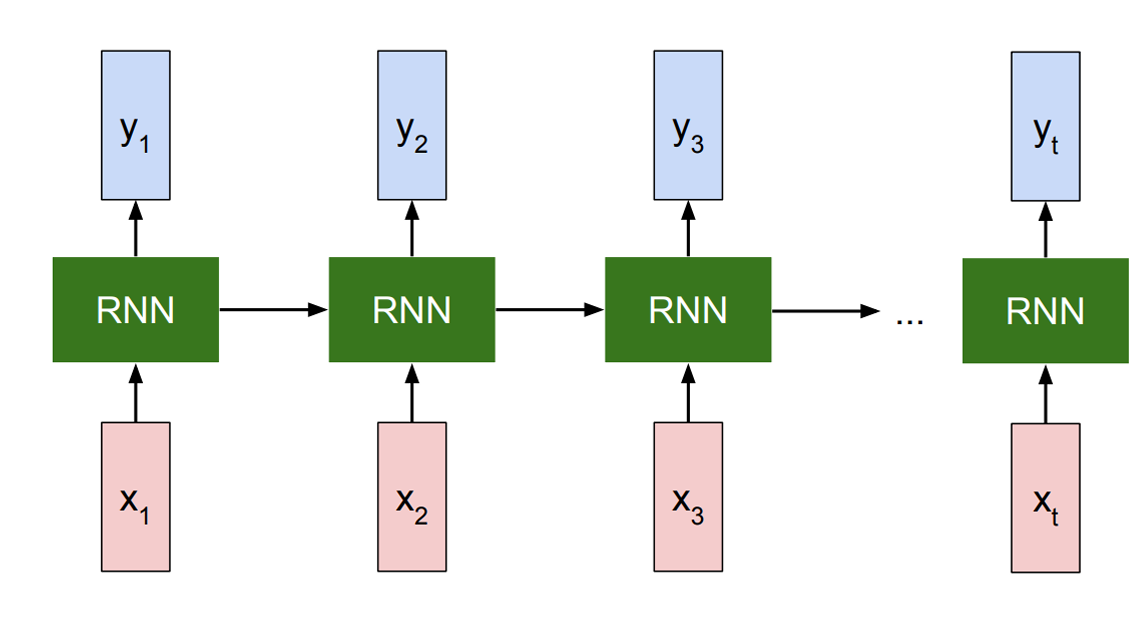
这个图就清楚展示了 x 是不同时刻的输入,y是不同时刻的输出。
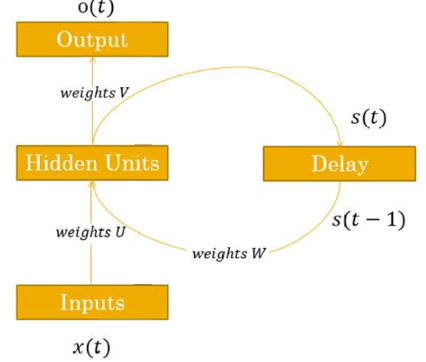
2.4 RNN 隐藏状态的更新
RNN 隐藏状态的更新公式为:
h t = f W ( h t − 1 , x t ) h_t=f_W(h_{t-1},x_t) ht=fW(ht−1,xt),
其中 h 𝑡 ℎ_𝑡 ht表示 new state(新的记忆),当前时间步的 hidden state。
h 𝑡 − 1 ℎ_{𝑡-1} ht−1表示 old state(旧的记忆),上一个时间步的 hidden state。
x 𝑡 x_{𝑡} xt表示 input vector(当前输入),当前时间步的输入向量。
f W f_{W} fW表示带参数的函数,一个可学习的函数,参数是 W W W,在所有时间步共享,也就是每一个时间步,用的都是同一个函数、同一套参数 W W W。
2.5 RNN 的输出
RNN output generation(输出生成) 的公式为:
y t = f W 0 ( h t ) y_t=f_{W_0}(h_{t}) yt=fW0(ht),
其中 y 𝑡 y_𝑡 yt表示当前时间步的输出。
h 𝑡 ℎ_{𝑡} ht表示 new state(新的 hidden state)。
f W 0 f_{W_0} fW0表示输出函数,另一个可学习函数,参数是 W 0 W_0 W0,在所有时间步共享。
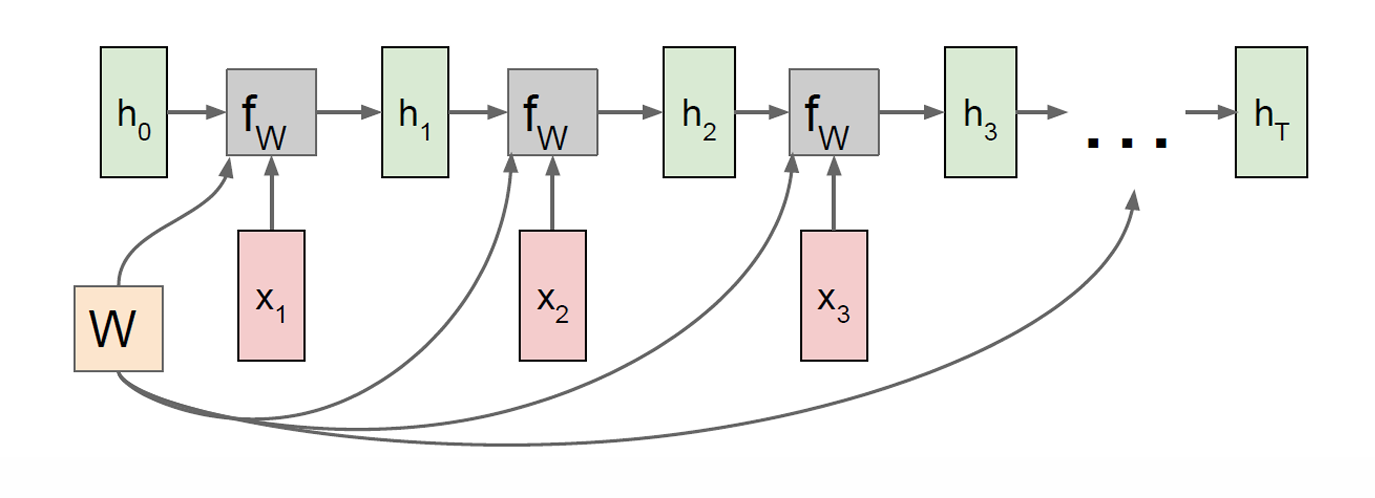
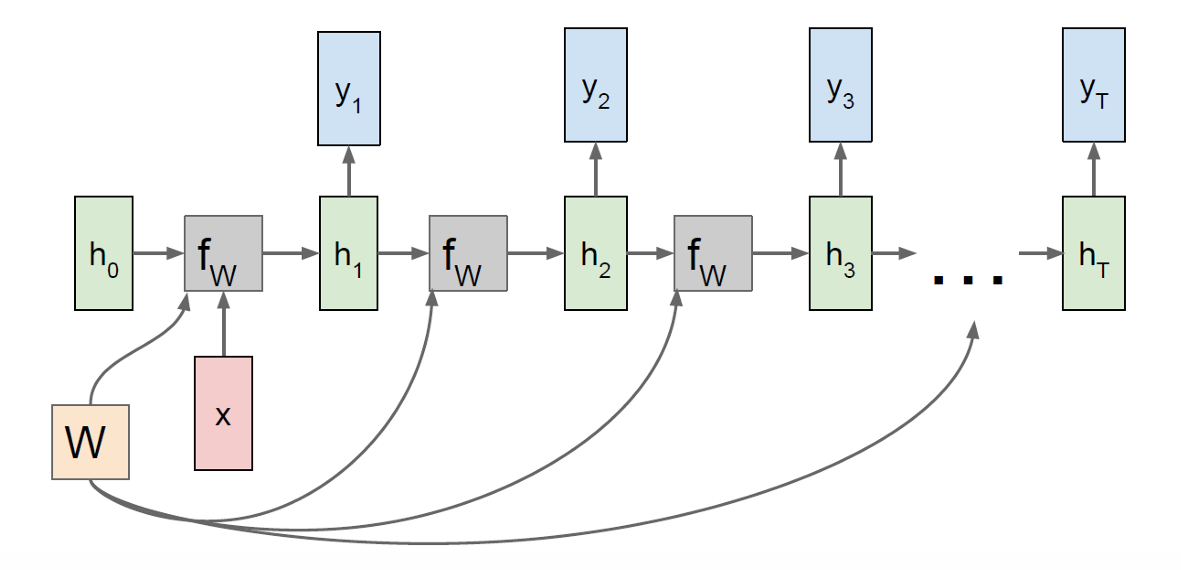
因此现在一个完整的 RNN 在时间维度上全部摊开在这里。
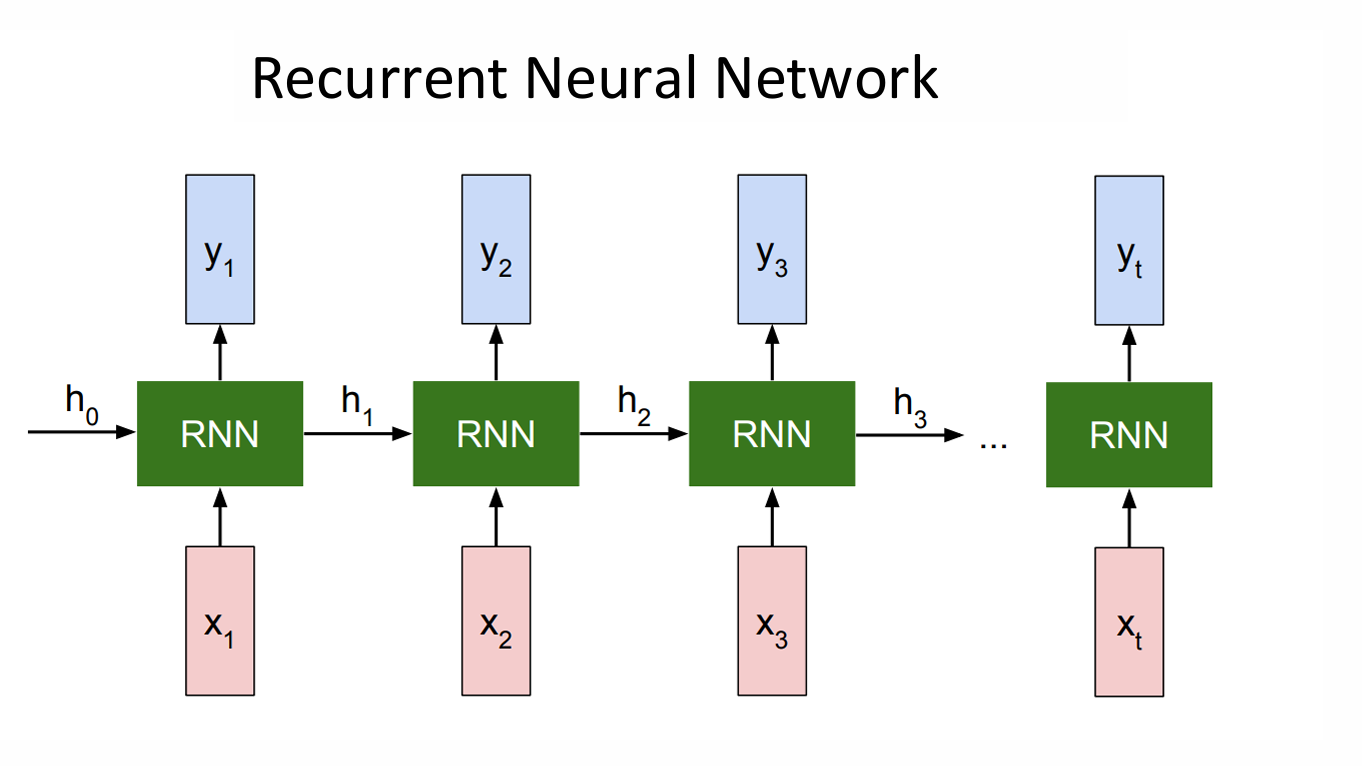
RNN 在处理序列时,会从一个初始隐藏状态 h 0 ℎ_0 h0开始,逐步读入 𝑥 1 , 𝑥 2 , ... 𝑥_1,𝑥_2,... x1,x2,...,并在每个时间步更新 hidden state,同时生成对应的输出 y t y_t yt。
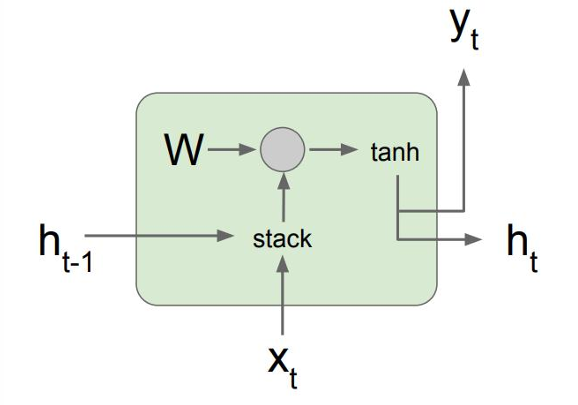
2.6 最基础的 RNN(vanilla RNN / Elman RNN)
我们现在站是一个最基础的 RNN(vanilla RNN / Elman RNN),它只有一个状态:hidden vector h ℎ h,它在每个时间步由"上一步的 h ℎ h+ 当前输入 𝑥 𝑥 x"通过 t a n h tanh tanh更新,输出 𝑦 𝑦 y只是对 h ℎ h做一次线性映射。
用公式表示,那就是这里 h t = f W ( h t − 1 , x t ) h_t=f_W(h_{t-1},x_t) ht=fW(ht−1,xt)的学习函数是 h t = tanh ( W h h h t − 1 + W x h x t ) h_t = \tanh\left(W_{hh} h_{t-1} + W_{xh} x_t\right) ht=tanh(Whhht−1+Wxhxt),
输出生成公式为 y t = W h y h t y_t = W_{hy} h_t yt=Whyht,这里学习函数就如前面所说是简单的一次线性映射。
我们下面用展开的方式一步步是怎么计算的。
 从左边开始,如下图所示是一步。
从左边开始,如下图所示是一步。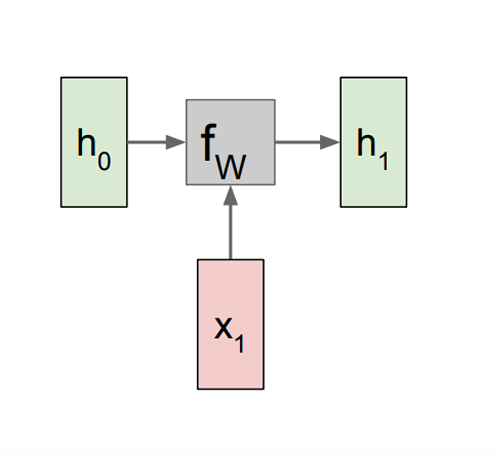
h 1 = f W ( h 0 , x 1 ) h_1 = f_W(h_0, x_1) h1=fW(h0,x1),
其中 h 0 h_0 h0是初始 hidden state(通常初始化为 0 向量,或设为可学习参数)
x 1 x_1 x1是第一个时间步的输入向量(例如第一个词的 embedding)
f W f_W fW是带参数 W W W 的递推函数(RNN 单元本身,在所有时间步共享参数)
h 1 h_1 h1是更新后的 hidden state,表示在看到 x 1 x_1 x1 之后模型的内部记忆状态
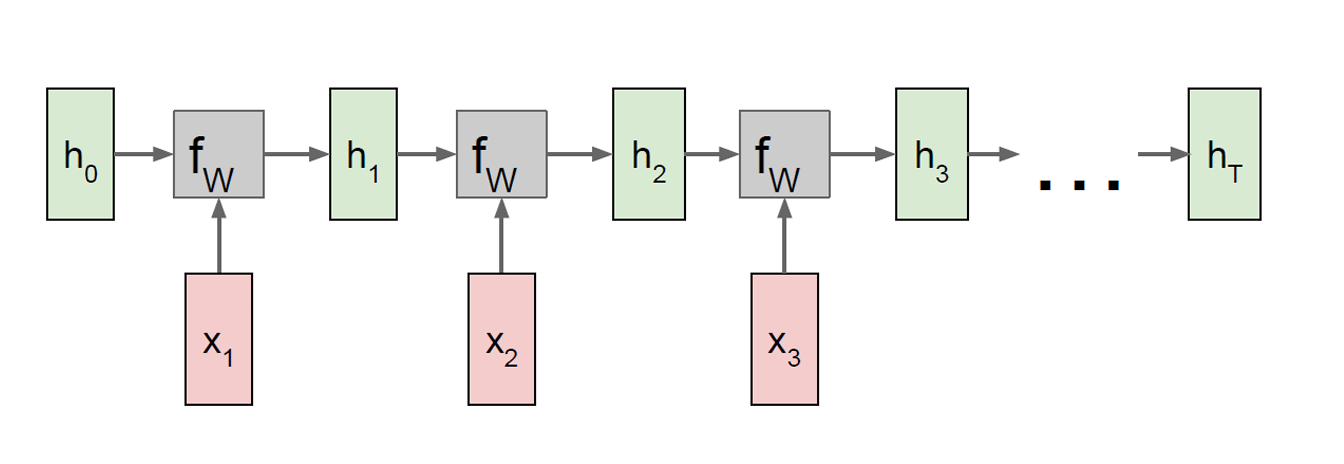
最上面的那张图正沿着这样的步骤,一步一步接着进行下去,这里每一步都是一样的 f W f_W fW,也就是参数共享(re-use the same weight matrix)。
2.7 结构拓展
我们将之与前面说的不同结构相结合。
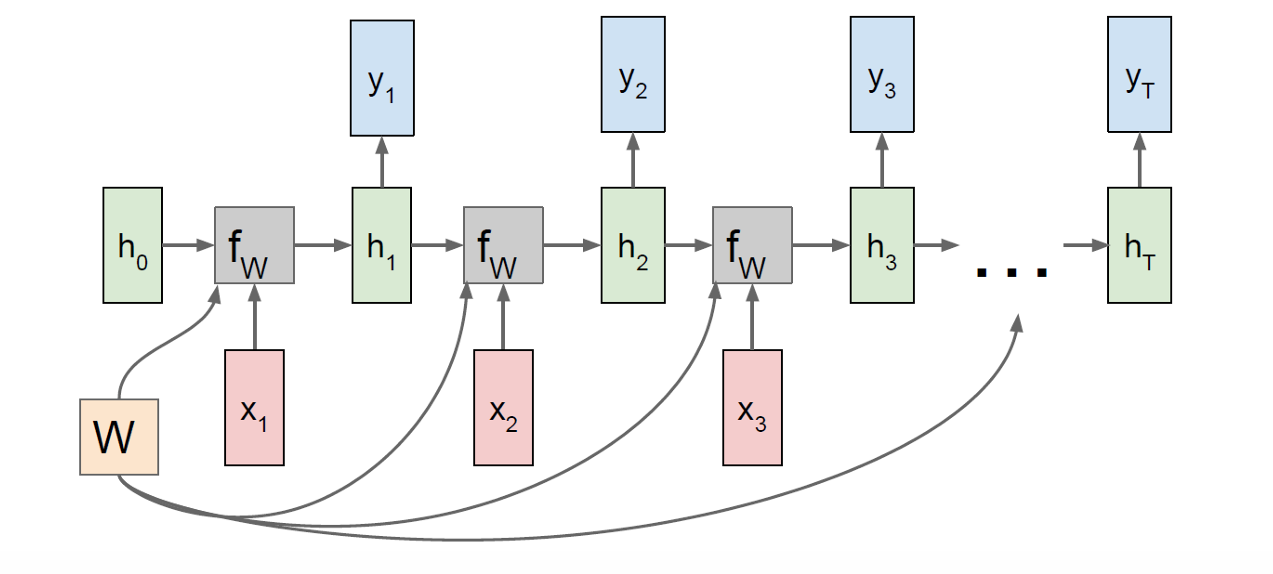
首先是 many-to-many(多对多),在每个时间步同时读一个输入 x t x_t xt,并产生一个输出 y t y_t yt,输出与输入在时间上对齐。
因此现在每个状态更新的同时都会带有一个新的输出。
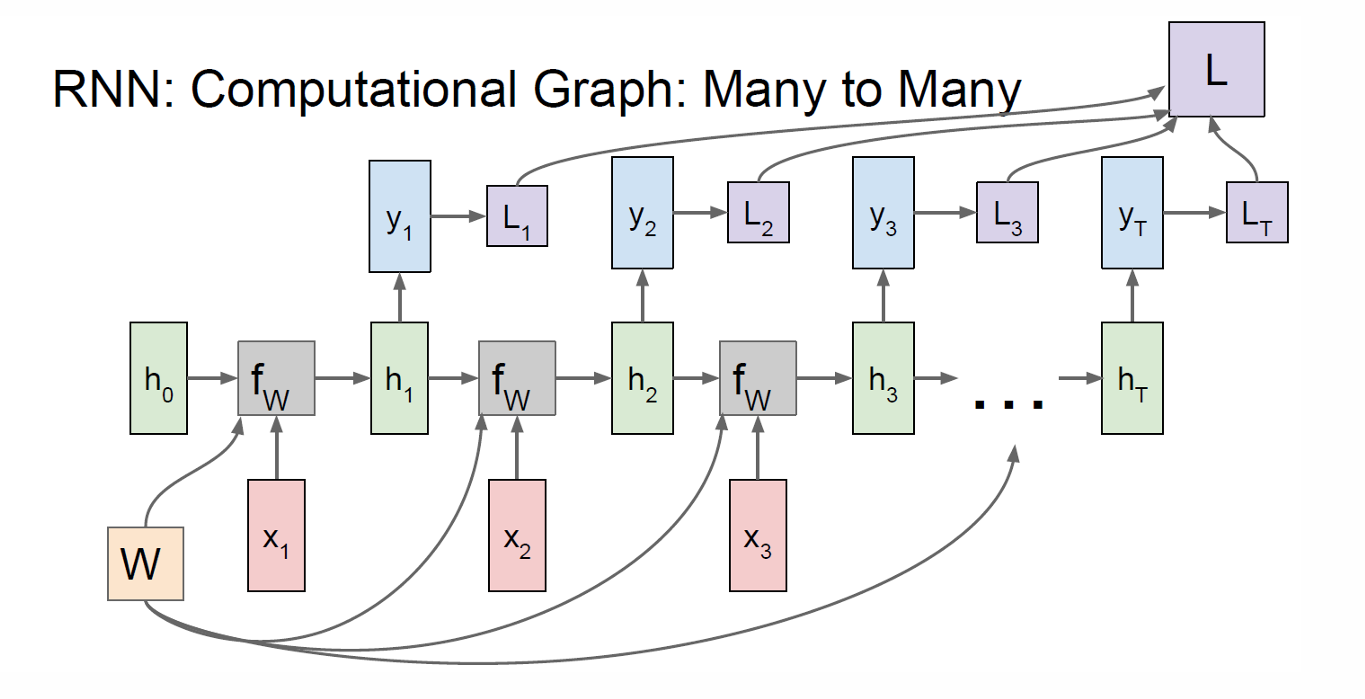
因此我们可以计算每一步的损失函数Loss。
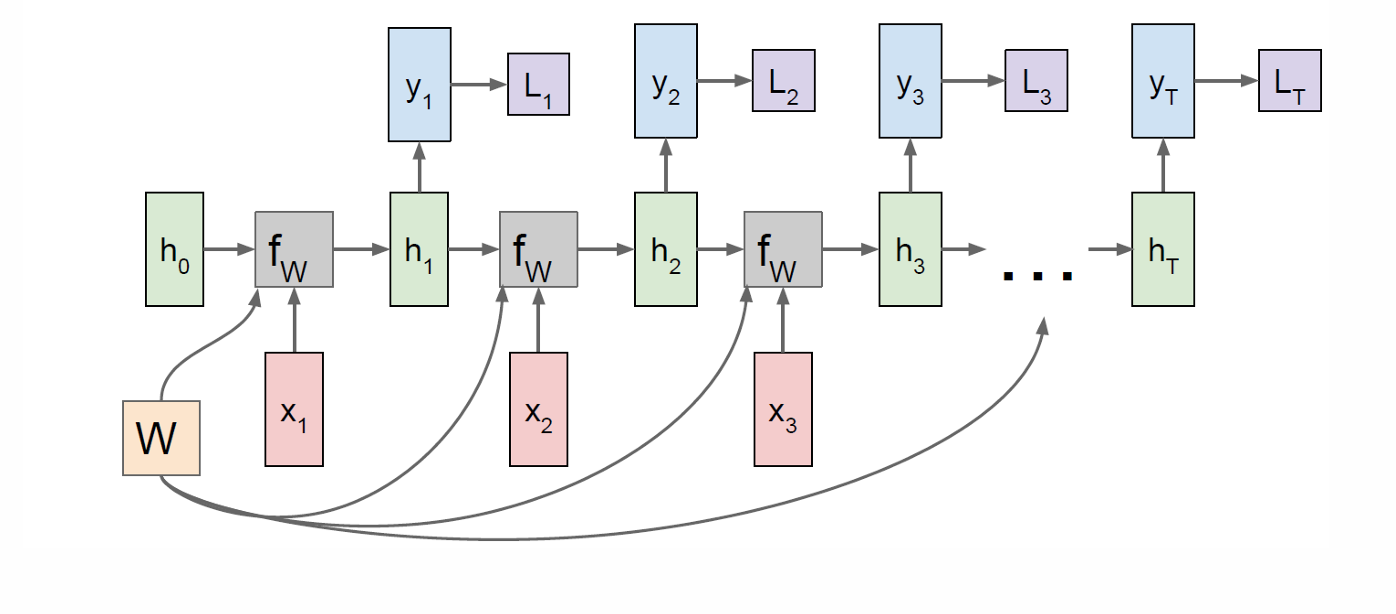
我们现在将其损失函数加起来就得到总损失。
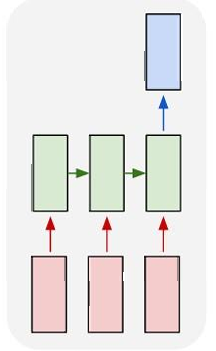
many-to-on(多对一),输入是一整段序列,但只在最后一个时间步产生一个输出。

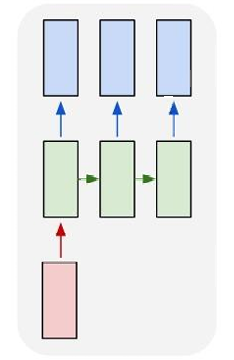
one-to-many(一对多),RNN 从一个初始信息(如一个向量或起始符)开始,通过时间递推,逐步生成多个输出。
2.7.1 Sequence-to-Sequence(Seq2Seq)模型
Sequence-to-Sequence模型是将两个 RNN 结构拼在一起。
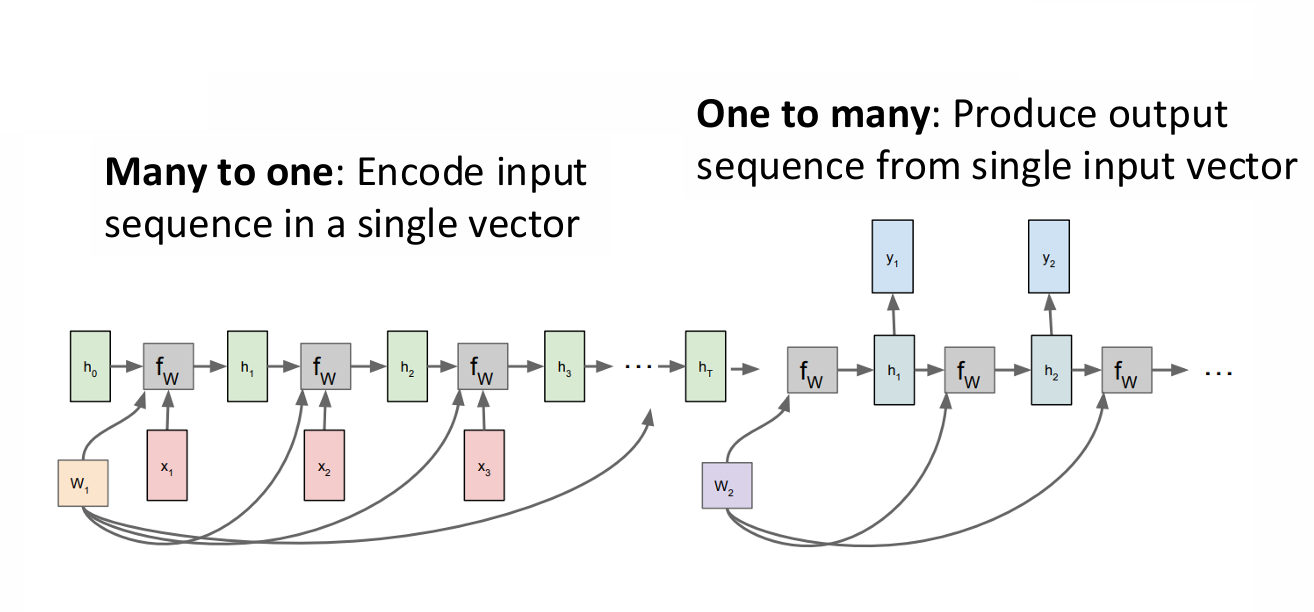
模型先把输入序列编码成一个向量(Encoder),再从这个向量出发生成一个输出序列(Decoder)。
左半部分:Many-to-one(Encoder,编码器)。
右半部分:One-to-many(Decoder,解码器)。
2.8 RNN应用
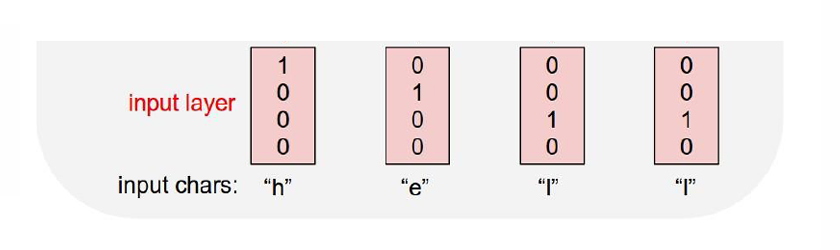
我们用一个例子展示 RNN 如何做字符级语言模型(Character-level Language Model)。
假设我们训练的序列是"hello",这里我们涉及4个字符分别是"h,e,l,o",这四个字符我们使用One-Hot 编码(独热编码),将每个字符表示为一个长度等于词表大小的向量,其中只有一个位置是 1,其余全是 0。
我们可以根据公式进行计算。
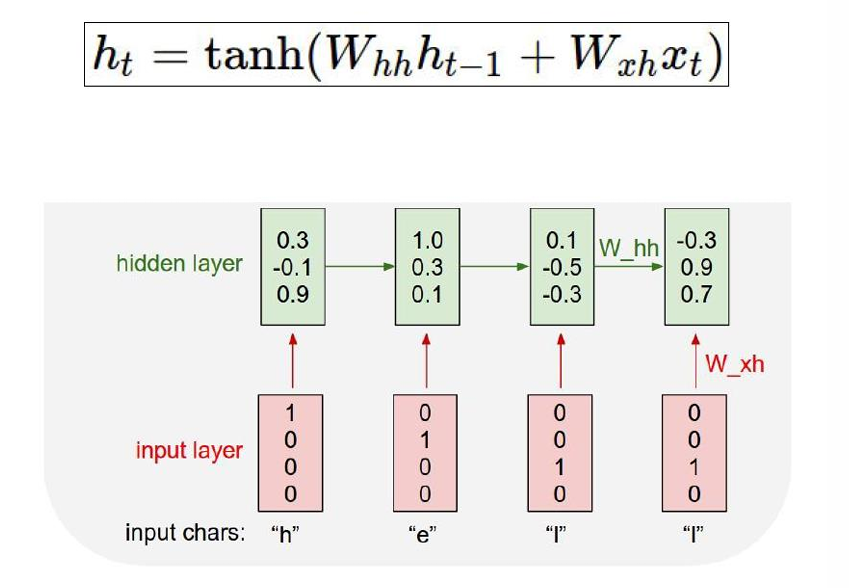
如图所示,红色表示的是输入 (x_t)(one-hot 编码的字符)
第一个绿色是初始隐藏状态 h 0 h_0 h0, 后面的绿色依次是 h 1 , h 2 , ... h_1, h_2, \ldots h1,h2,...。
在计算新的隐藏状态使用的参数用于之前隐藏状态的参数是 W h h W_{hh} Whh,用于输入的参数是 w x h w_{xh} wxh。
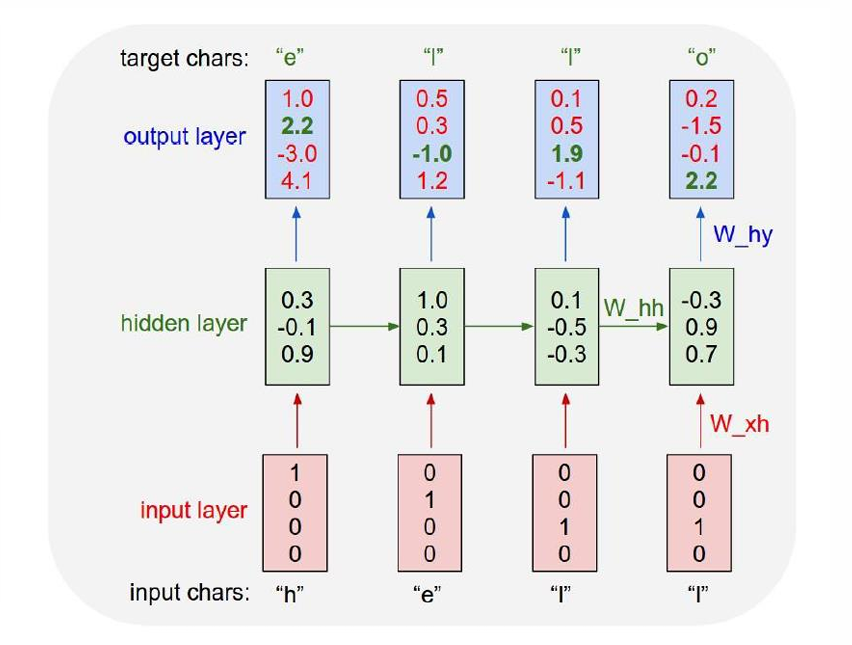
蓝色是由当前隐藏状态 h t h_t ht计算得到的输出 y t y_t yt,所以这里的参数是 W h y W_{hy} Why。
整个模型是many-to-many(多对多)。
我们在实际应用中还会使用Softmax函数将logits转成概率分布,如下图所示。
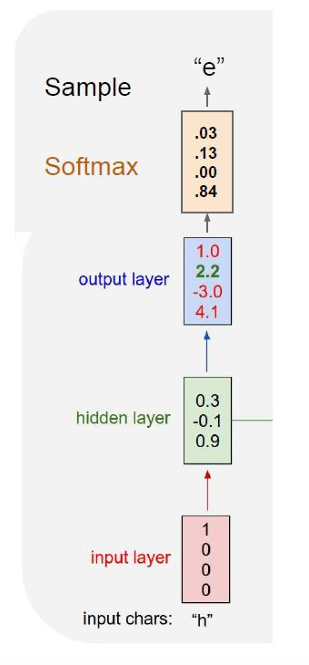
在测试阶段,模型一次只生成(采样)一个字符,并把刚生成的字符再喂回模型作为输入。
因此完整过程如下。
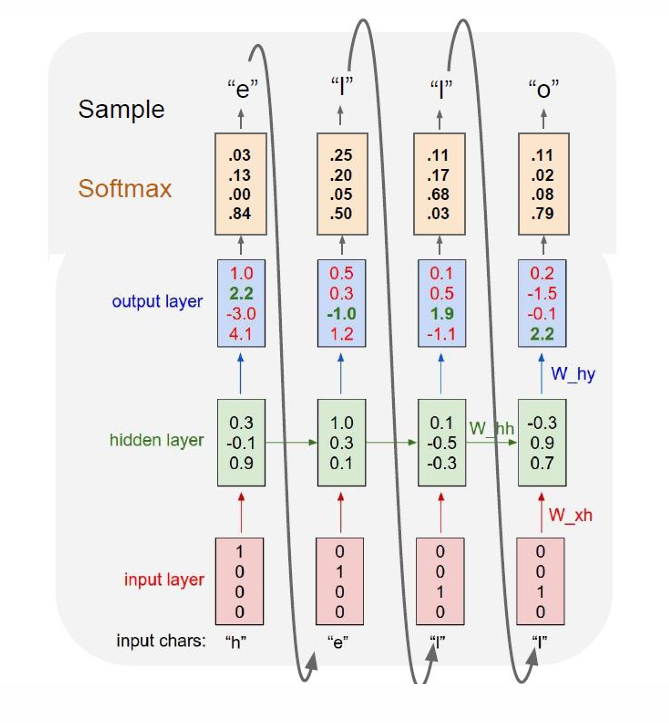
因此我们可以看出字符级语言模型是在每一个时间步,根据当前字符和之前的上下文,预测"下一个字符"的概率分布。
所以我们现在分开理解,我们如果要输入hello这个单词,我们输入h后,模型就会根据输入h,预测我们下一个输入e,然后它会将这个预测结果再喂给自己,得出下一个预测l,从而得到完整的预测hello。
2.9 RNN的训练方式
RNN的训练方式是时间反向传播(Backpropagation Through Time,BPTT)。
我们先沿时间顺序 forward 跑完整个序列,算出所有输出和总 loss,再沿时间反方向 backward,反方向传播计算梯度来更新共享参数,这个过程就叫时间反向传播(Backpropagation Through Time,BPTT)。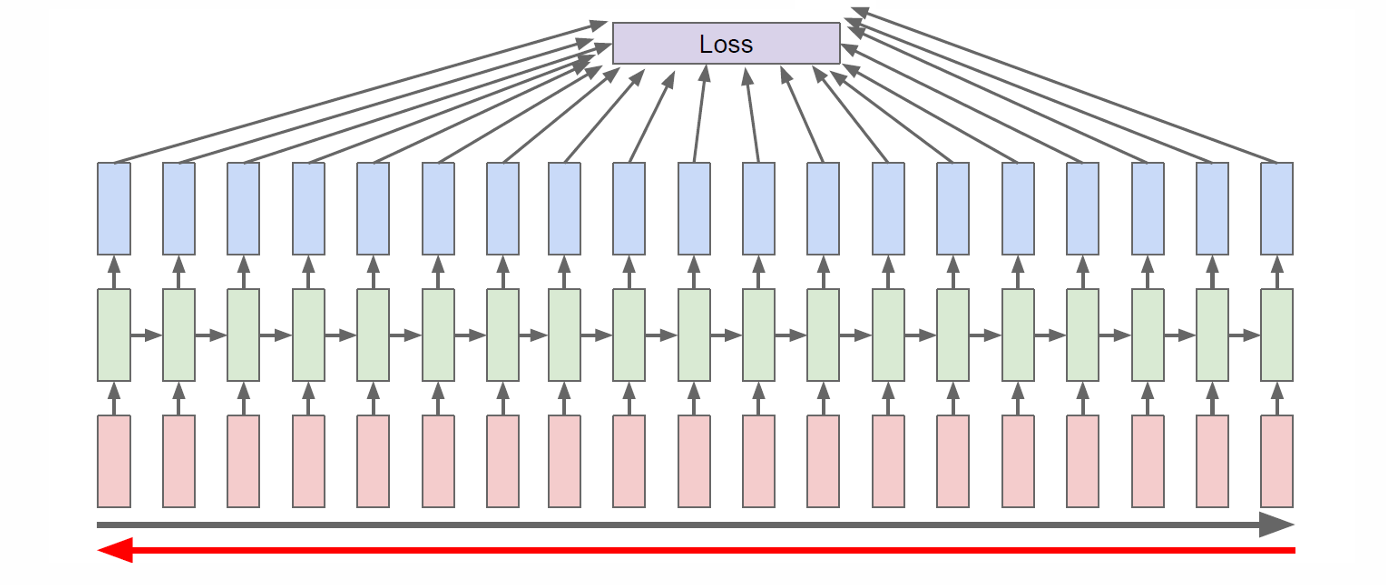
那么为什么不能一步一步算、一步一步更新?
因为RNN的参数在所有时间步共享,所以无法中途修改。
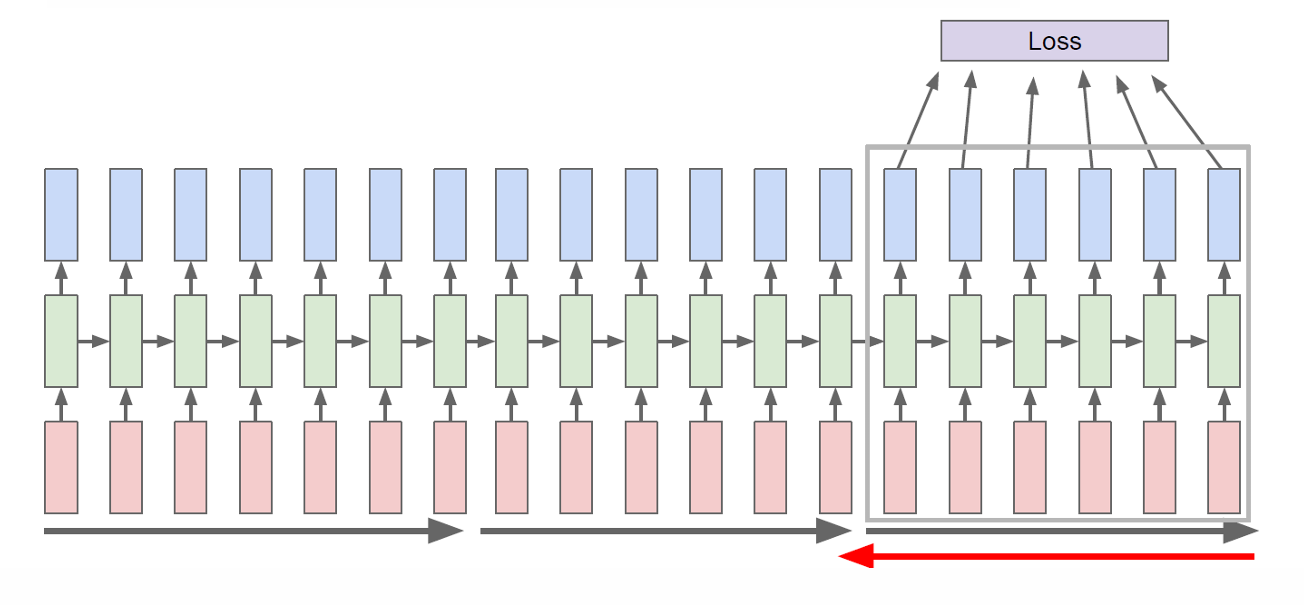
2.9.1 截断时间反向传播(Truncated Backpropagation Through Time,TBPTT)
如果我们按照前面的方法把序列完全展开,梯度从最后一步一路传回最开始会遇到以下几个问题:
- 内存需求极大
- 计算非常慢
- 梯度消失严重
因此在实际训练中我们一般使用TBPTT,将很长的序列切成一小段一小段(chunks),每次只在这段里做 forward + backward,而不是在整个序列上反向传播。
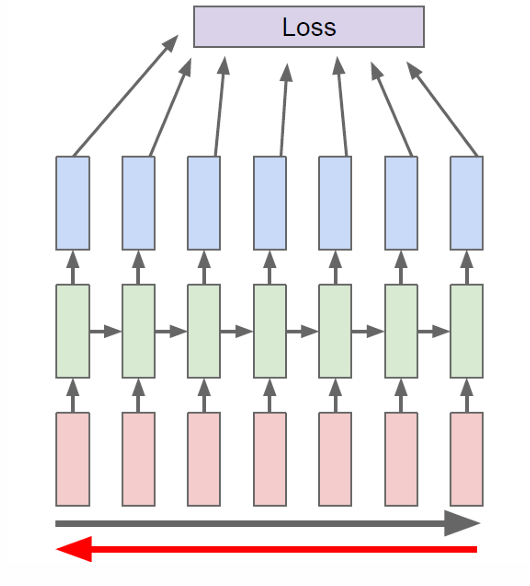
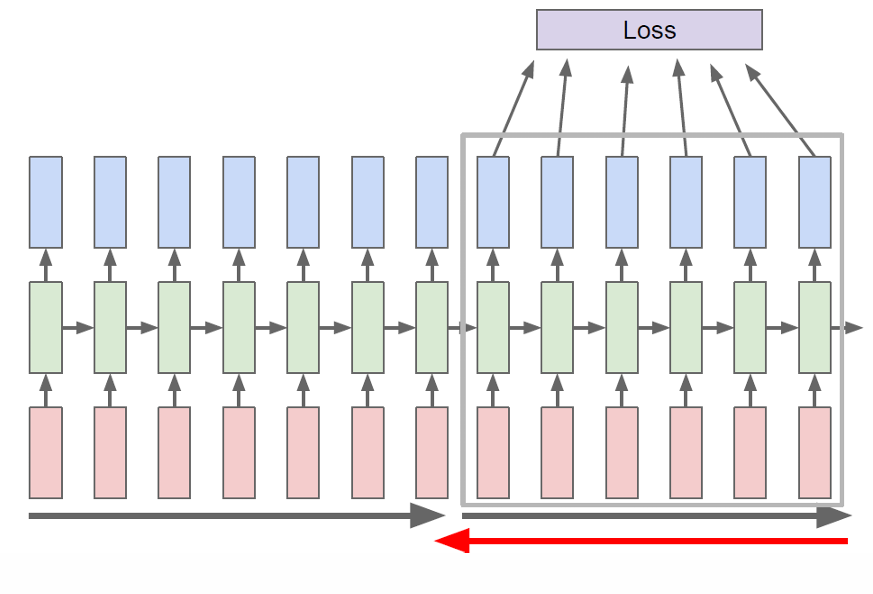
hidden state 一直往前传(不截断,如灰色箭头所示),但梯度只往回传固定的 K K K个时间步(被截断,如红色箭头所示)。
2.10 RNN 总结
RNN 的优点有:
- 可以处理任意长度的输入序列。RNN 结构不变,只是时间步变多。换句话说那就是RNN非常适合处理序列数据(文本、语音、时间序列)
- 在"理论上",第 t 步的计算可以利用很久以前的信息。
- 输入变长,模型参数不会变多。这一点与第一点同理,因为权重矩阵 W x h W_{xh} Wxh, W h h W_{hh} Whh, W h y W_{hy} Why是固定的,不会因为序列更长就多参数。
- 每个时间步用的是同一套权重,这带来一种时间上的对称性(symmetry)。
RNN 的缺点有:
- 递归计算很慢。RNN不能并行,后面的时间步必须等前面的算完,因此对 GPU 非常不友好。序列一长,训练就慢。
- 在实际中,很难真的利用很久以前的信息。这是因为梯度消失,即使 hidden state 理论上传得下去,但训练时早期信息影响会越来越弱,模型更关注"最近几步"。
2.11 更多应用
2.11.1 图像字幕生成(Image Captioning)模型
本质是CNN + RNN 的 sequence-to-sequence 结构。
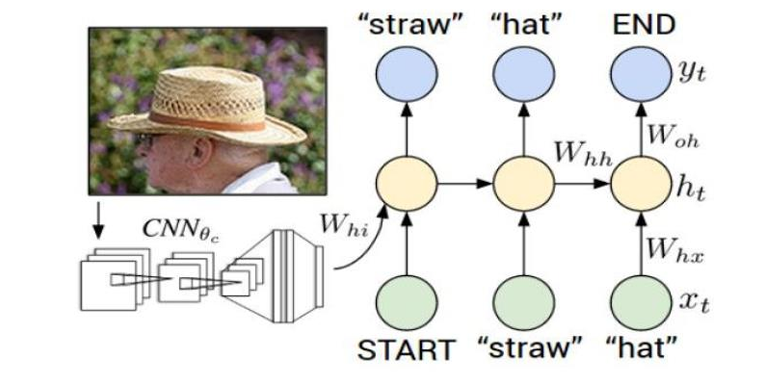
我们输入一张图片,CNN(卷积神经网络)逐层提取特征,最终输出一个固定长度的向量,它不是一个我们可以理解的文字信息,而是描述这张图的语义的数学表示。
而后面的 RNN 会把图像特征"翻译"成一句话。这里输出的图像特征通过权重 W h i W_{hi} Whi送进 RNN 的 hidden state,RNN 在生成每一个词的时候,脑子里一直带着这张图片的信息。
再细化一点,那就是 RNN 内部第 t t t个时间步:输入上一个词后,计算新的 hidden state h t h_t ht,然后输出一个词的概率分布 y t y_t yt, 选一个词作为当前输出,然后这个输出继续作为输入生成下一个词。这与前面说的字符级语言模型(Character-level Language Model)是类似的。
因此现在我们的 hidden state 的更新公式升级为:
h t = tanh ( W x h x t + W h h h t − 1 + W i h v ) h_t = \tanh\left(W_{xh} x_t+ W_{hh} h_{t-1}+ W_{ih} v\right) ht=tanh(Wxhxt+Whhht−1+Wihv)
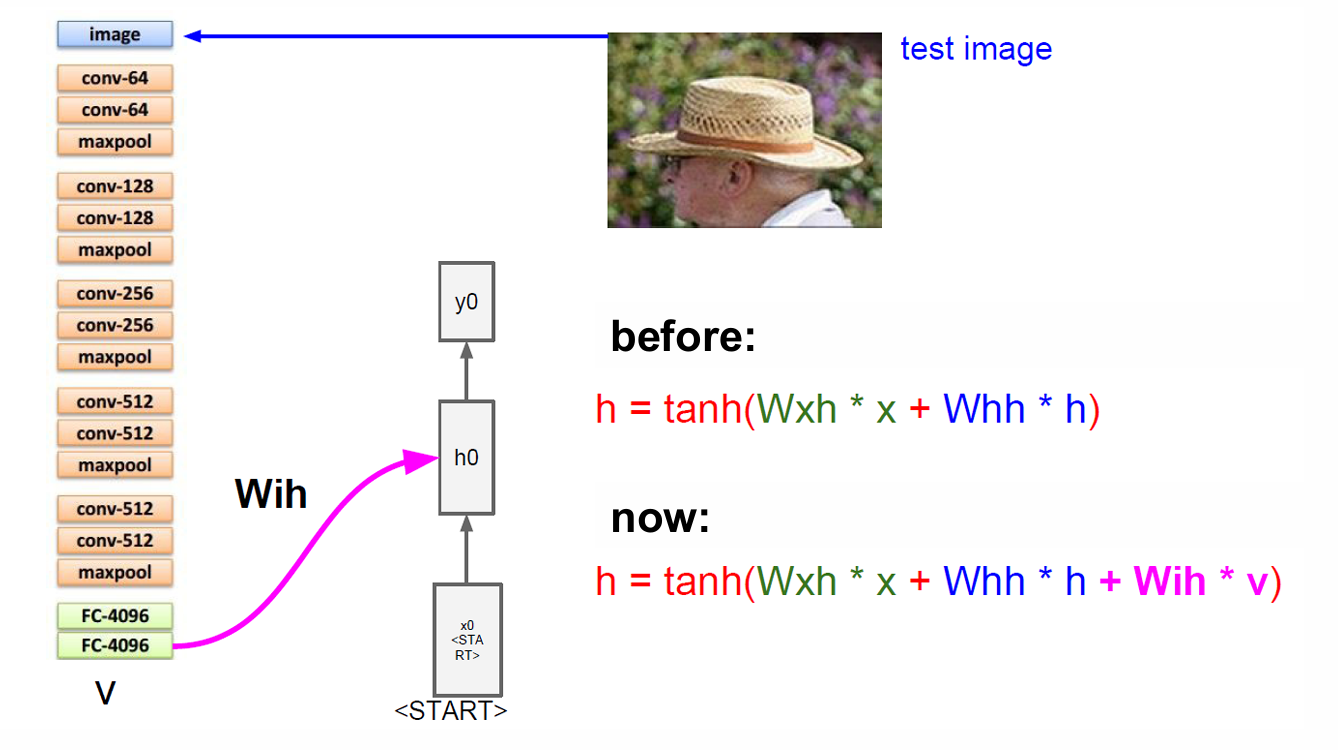
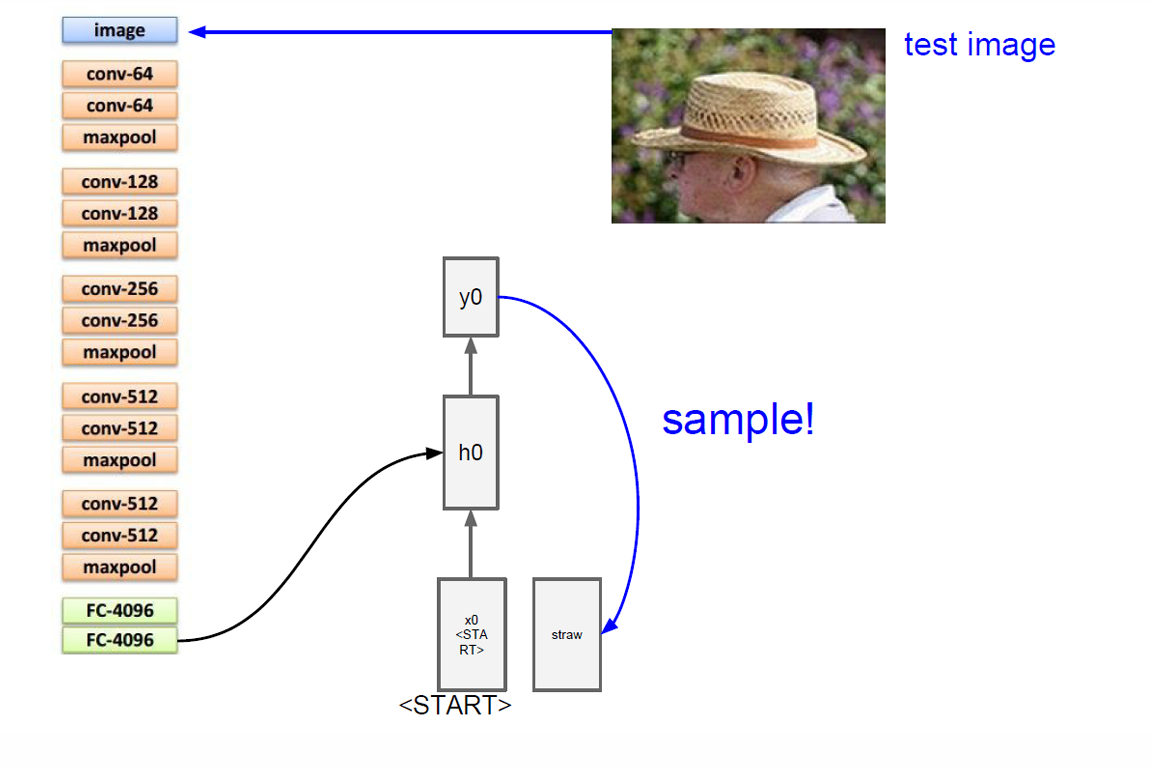
因此在这个例子中,我们放入一个草帽的照片。
我们的 CNN 提取图片的信息,将这个输入给 RNN 其采样生成第一个词"straw"。
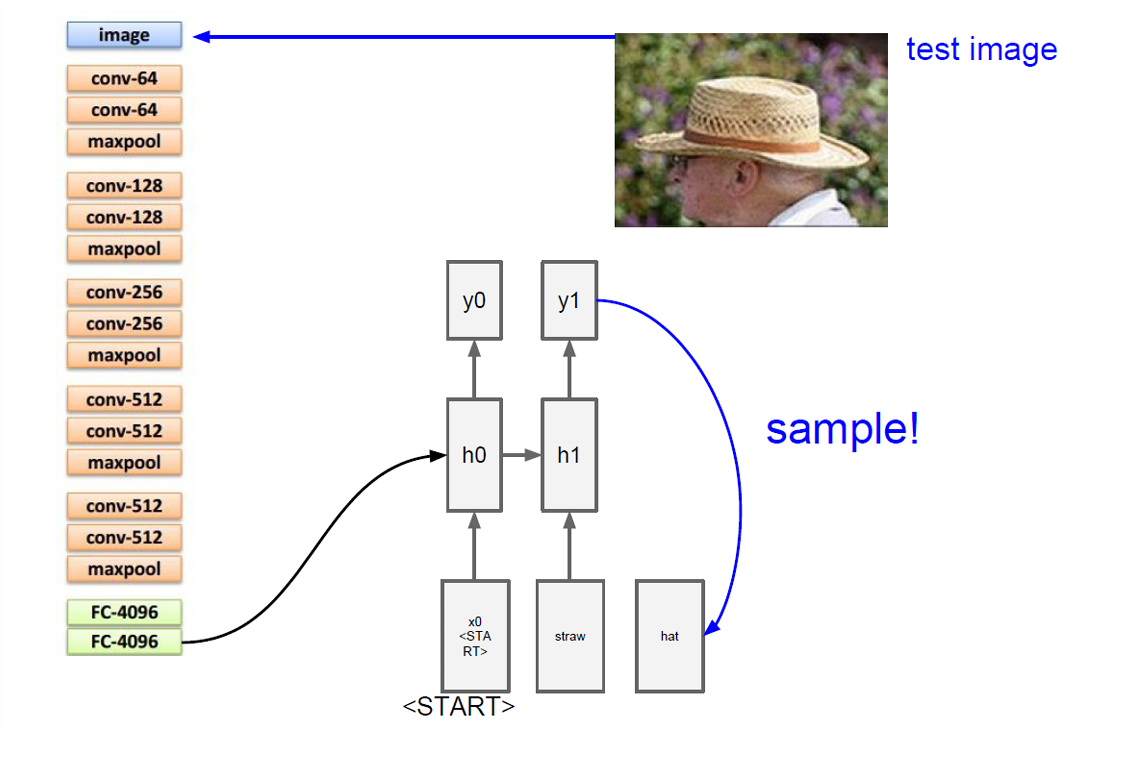
然后这个词作为下一步的输入然后更新隐藏状态并且得到新的输出"hat"。
这就是图像字幕生成模型。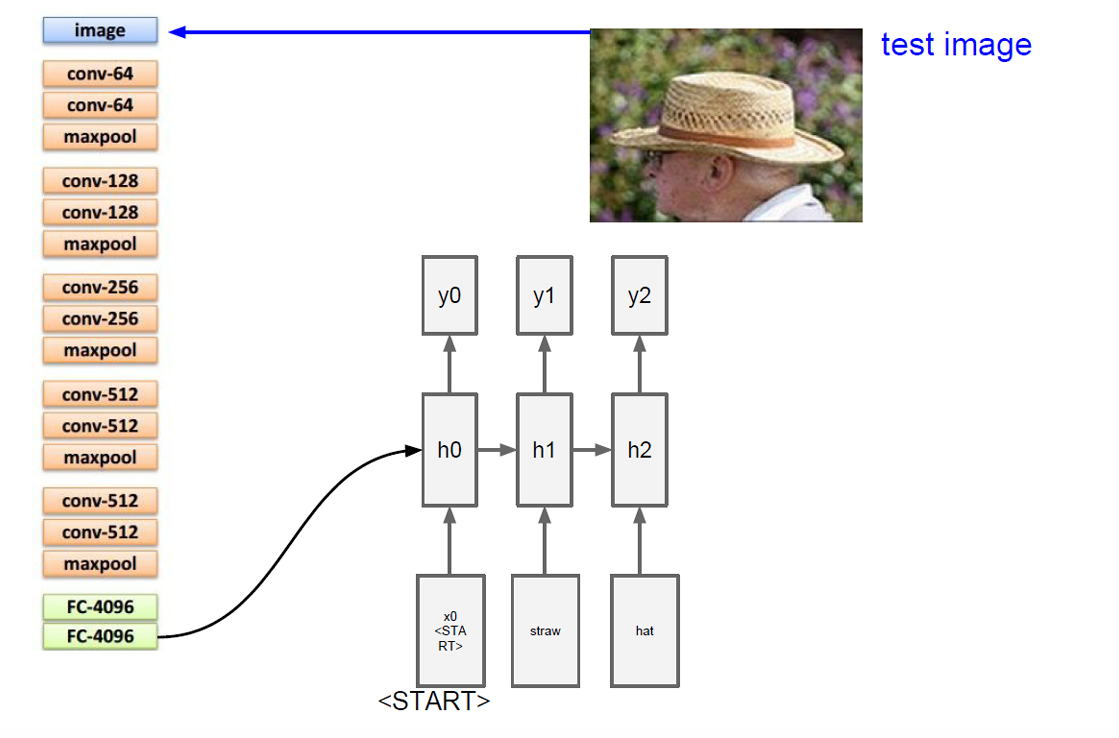
下面展示更多例子。
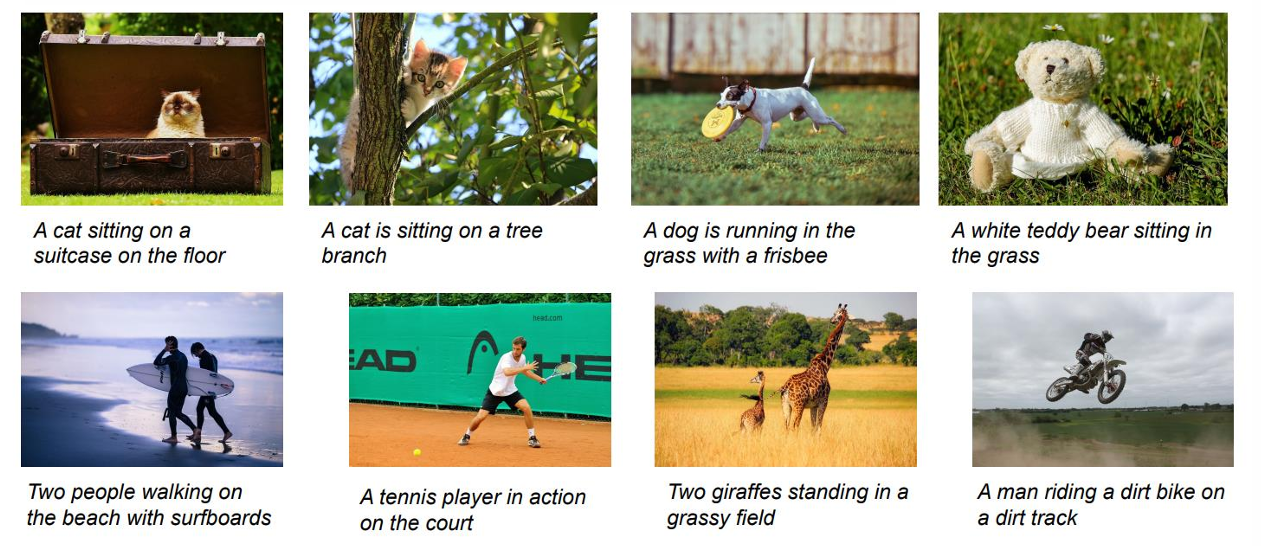
当然也会存在一些问题,下面就展示一些失败的例子。
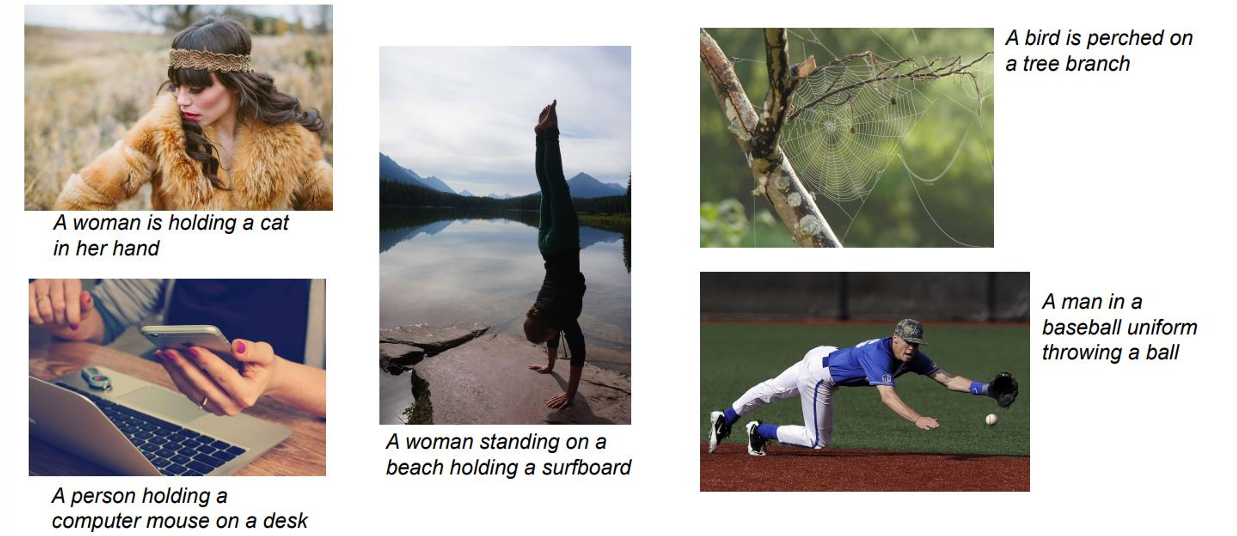
所以即使模型能生成"看起来很合理的句子",也经常会在语义理解上出错。
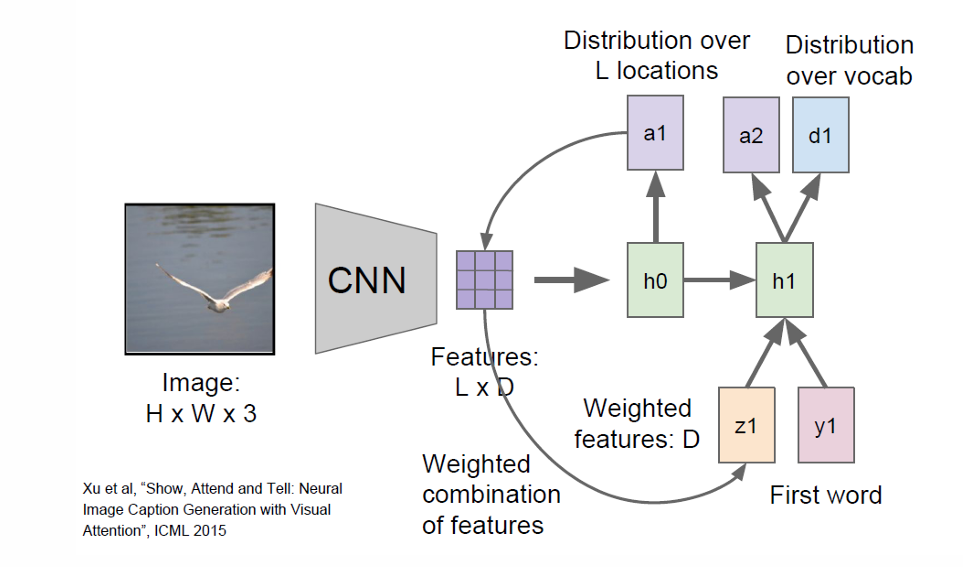
2.11.2 带注意力机制的图像描述(Image Captioning with Attention)
我们前面提到了一些失败案例。这里说的注意力机制正是用于解决这类问题的。我们让 RNN 在生成每一个单词时,把注意力集中在图像的不同空间位置上。
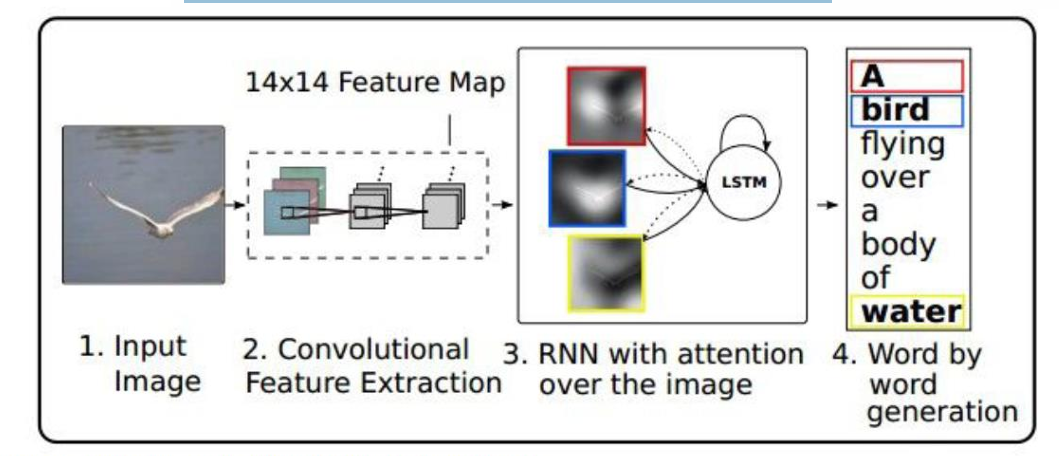
在原来的RNN中,我们一次看一张图,将整个图压成一个向量,后面生成所有词都靠"记忆"。
现在有注意力机制,RNN每生成一个词,我们再决定看向图的哪里,因此会看图片多次。
所以现在我们的 CNN 不再只输出一个向量,而是输出一组空间特征。
我们的 RNN 也不会只看一个位置而是对所有 L L L个空间位置给一个概率,也就是一个 attention 向量。
然后我们把把整张图"按注意力权重压缩"为一个向量。
当前生成这个词时,图像中哪些地方最重要,就占比更大。
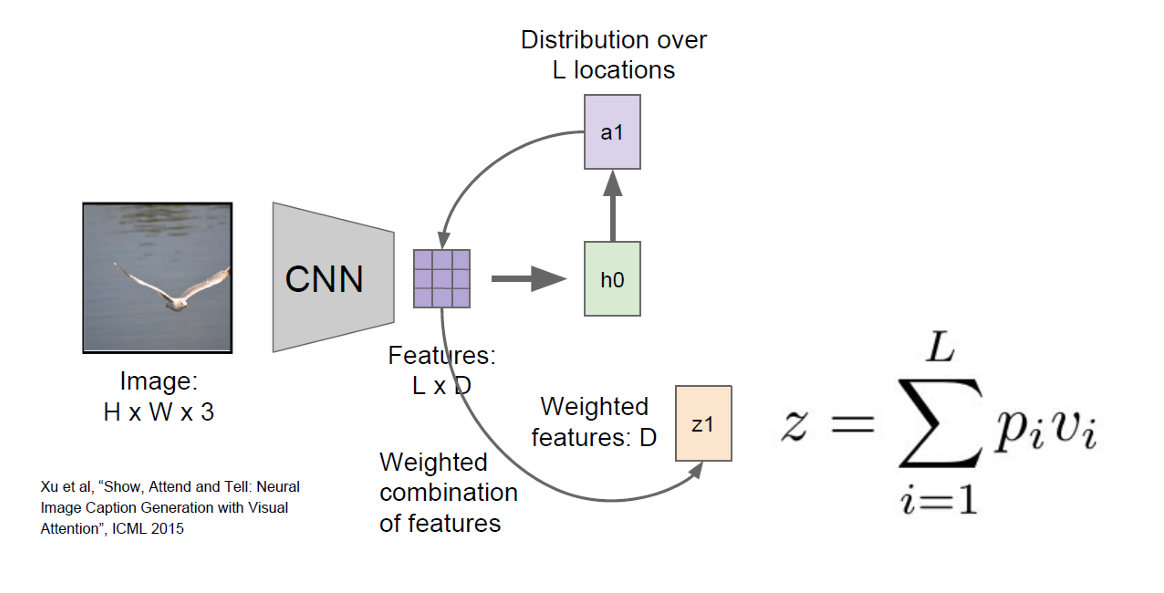
这里因为我们是第一个所以我们的第一个上下文向量计算为 z 1 = ∑ i = 1 L α 1 , i v i z_1=\sum_{i=1}^{L} \alpha_{1,i} \, v_i z1=∑i=1Lα1,ivi,其中 v i v_i vi是第 i i i个空间位置的 CNN 特征向量, α 1 , i \alpha_{1,i} α1,i是在生成第一个词时,对第 i i i个位置的注意力权重。
我们先更新 hidden state,
h 1 = R N N ( h 0 , y 0 , z 1 ) h_1 = \mathrm{RNN}(h_0, y_0, z_1) h1=RNN(h0,y0,z1)。
其中 h 0 h_0 h0是初始 hidden state 。
y 0 y_0 y0是起始词的嵌入向量。
z 1 z_1 z1是由 attention 机制得到的图像上下文向量。
由 hidden state 生成输出分布
d 1 = S o f t m a x ( W h y h 1 ) d_1 = \mathrm{Softmax}(W_{hy} \, h_1) d1=Softmax(Whyh1)。
我们再从 d 1 d_1 d1里采样或取最大概率词,得到第一个词 y 1 y_1 y1。
我们还可以根据这里的 h 1 h_1 h1计算出新的第二个词的注意力权重 a 2 a_2 a2,由此计算出第二个上下文向量 z 2 z_2 z2,然后结合第一个得到的词更新 h 2 h_2 h2,由此往下。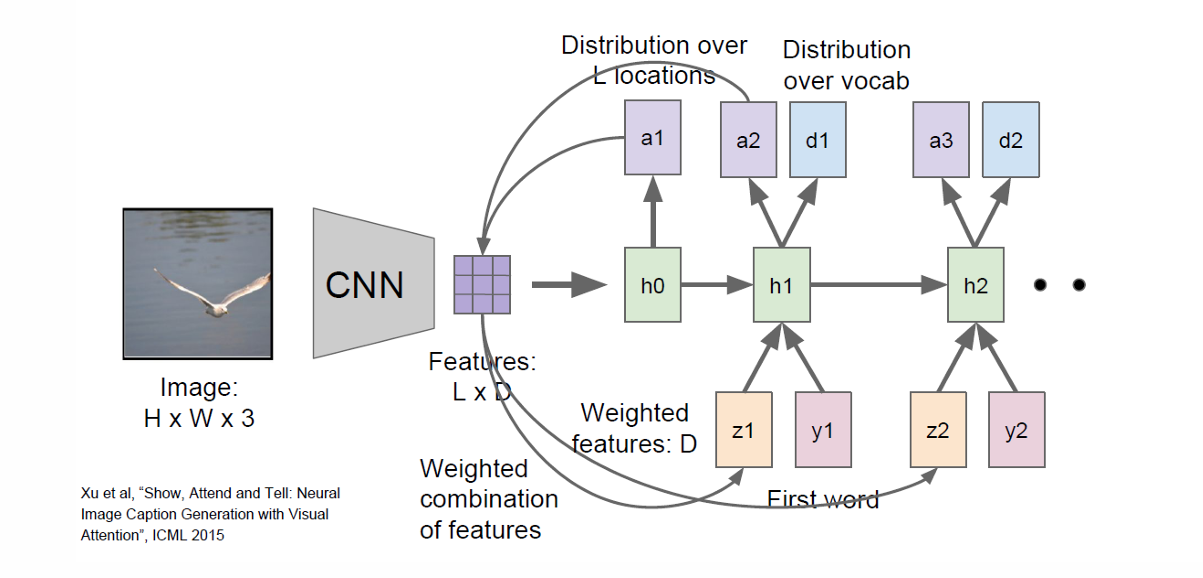
整个过程如下图所示。
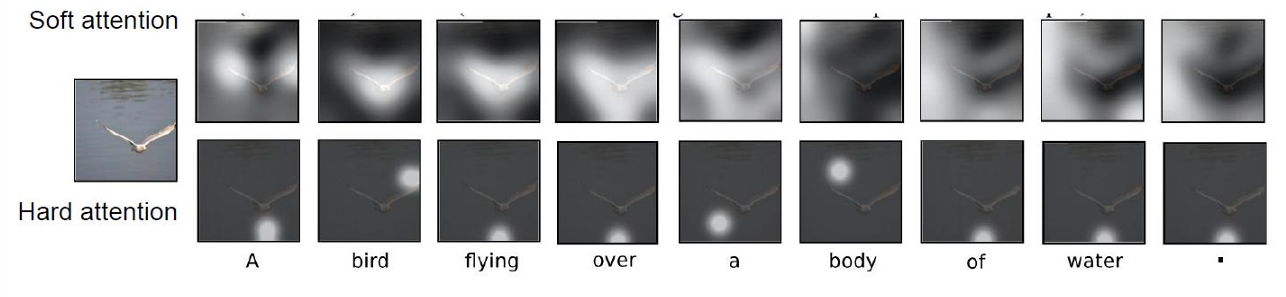
这里 Soft Attention(软注意力)是模糊地看一片区域。
而 Hard Attention(硬注意力)是只看一个位置,其它地方完全不看。
下面展示一些结果。

3. LSTM(Long Short-Term Memory,长短期记忆网络)
我们现在介绍一种更有记忆的网络LSTM。
我们前面可以注意到,很多图里用的并非RNN而是LSTM,因为 Vanilla RNN 将所有信息压缩进同一个 h t h_t ht中,时间一长,旧信息会被不断覆盖,而且反向传播时梯度容易消失。
3.1 梯度消失
我们现在解释为什么会梯度消失?
首先 h t = tanh ( W h h h t − 1 + W x h x t ) h_t = \tanh\left(W_{hh} h_{t-1} + W_{xh} x_t\right) ht=tanh(Whhht−1+Wxhxt)
我们用矩阵写法,那就是 h t = tanh ( ( W h h W h x ) ( h t − 1 x t ) ) h_t = \tanh \left( \begin{pmatrix} W_{hh} & W_{hx} \end{pmatrix} \begin{pmatrix} h_{t-1} \\ x_t \end{pmatrix} \right) ht=tanh((WhhWhx)(ht−1xt))
也就是 h t = tanh ( W ( h t − 1 x t ) ) ) h_t = \tanh \left( W \begin{pmatrix} h_{t-1} \\ x_t \end{pmatrix} \right) ) ht=tanh(W(ht−1xt)))
我们现在开始反向传播。
反向传播过程中,梯度需要乘以权重矩阵 W h h W_{hh} Whh的转置(即 W h h T W_{hh}^T WhhT)
从 h t h_t ht到 h t − 1 h_{t-1} ht−1梯度为 ∂ h t ∂ h t − 1 = tanh ′ ( W h h h t − 1 + W x h x t ) W h h \frac{\partial h_t}{\partial h_{t-1}} = \tanh'(W_{hh}h_{t-1} + W_{xh}x_t)W_{hh} ∂ht−1∂ht=tanh′(Whhht−1+Wxhxt)Whh

我们现在展示一个标准的循环神经网络(Vanilla RNN)中梯度的传播过程,这里包含多个时间步,每个时间步都有一个RNN单元。
损失函数 L L L对权重 W W W的梯度为 ∂ L ∂ W = ∑ t = 1 T ∂ L t ∂ W \frac{\partial L}{\partial W} = \sum_{t=1}^{T} \frac{\partial L_t}{\partial W} ∂W∂L=∑t=1T∂W∂Lt
因此 ∂ L T ∂ W = ∂ L T ∂ h T ∂ h T ∂ h T − 1 ⋯ ∂ h 1 ∂ W \frac{\partial L_T}{\partial W} = \frac{\partial L_T}{\partial h_T} \frac{\partial h_T}{\partial h_{T-1}} \cdots \frac{\partial h_1}{\partial W} ∂W∂LT=∂hT∂LT∂hT−1∂hT⋯∂W∂h1
= ∂ L T ∂ h T ( ∏ t = 2 T ∂ h t ∂ h t − 1 ) ∂ h 1 ∂ W = \frac{\partial L_T}{\partial h_T} \left( \prod_{t=2}^{T} \frac{\partial h_t}{\partial h_{t-1}} \right) \frac{\partial h_1}{\partial W} =∂hT∂LT(∏t=2T∂ht−1∂ht)∂W∂h1
而这里的 ∂ h t ∂ h t − 1 \frac{\partial h_t}{\partial h_{t-1}} ∂ht−1∂ht,计算前面提到过 ∂ h t ∂ h t − 1 = tanh ′ ( W h h h t − 1 + W x h x t ) W h h \frac{\partial h_t}{\partial h_{t-1}} = \tanh'(W_{hh}h_{t-1} + W_{xh}x_t)W_{hh} ∂ht−1∂ht=tanh′(Whhht−1+Wxhxt)Whh
由于由于 t a n h tanh tanh激活函数的导数 t a n h ′ tanh' tanh′的值域在 (0,1) 之间,因此当这个导数多次相乘时,结果会接近于0,导致梯度消失。
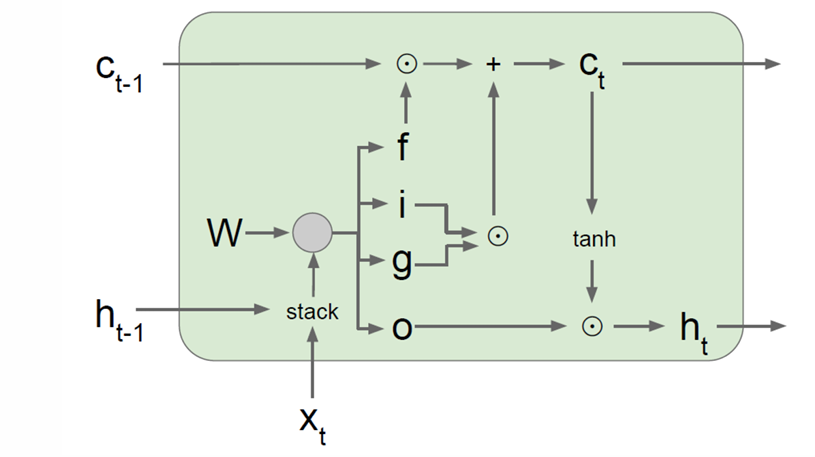
3.2 LSTM 的结构
LSTM 与 RNN 相比,在每个时间步不仅计算 h t h_t ht,它还同时维护一个"记忆通道" c t c_t ct,叫做cell state(细胞状态)。
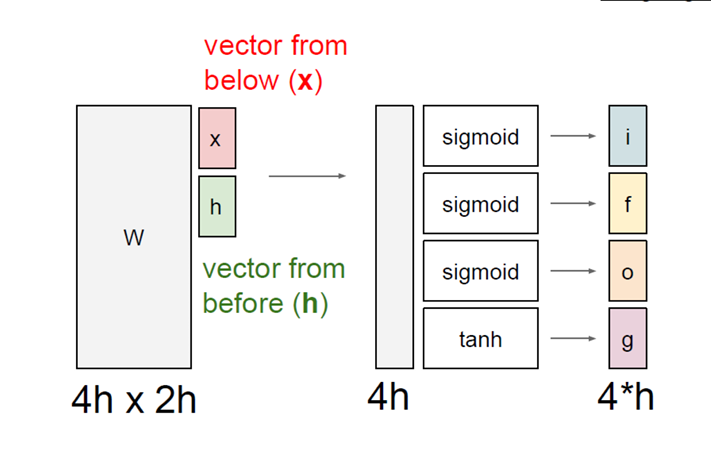
c t c_t ct用四个门(i, f, o, g)进行控制。
| 门 | 名字 | 作用 | 数值范围 |
|---|---|---|---|
| ( i t i_t it) | Input gate | 写不写新信息 | (0, 1) |
| ( f t f_t ft) | Forget gate | 忘不忘旧记忆 | (0, 1) |
| ( o t o_t ot) | Output gate | 输出多少记忆 | (0, 1) |
| ( g t g_t gt) | Candidate | 新候选内容 | (-1, 1) |
计算公式如下:
i t f t o t g t = σ σ σ tanh ( W h t − 1 x t ) \begin{bmatrix} i_t \\ f_t \\ o_t \\ g_t \end{bmatrix}= \begin{bmatrix} \sigma \\ \sigma \\ \sigma \\ \tanh \end{bmatrix} \left( W \begin{bmatrix} h_{t-1} \\ x_t \end{bmatrix} \right) itftotgt = σσσtanh (Wht−1xt)
作为关键核心的细胞状态 c t c_t ct的更新公式为:
c t = f t ⊙ c t − 1 + i t ⊙ g t c_t = f_t \odot c_{t-1} + i_t \odot g_t ct=ft⊙ct−1+it⊙gt
其中 ⊙ \odot ⊙表示元素乘法(Hadamard乘积)。
隐藏状态的更新公式为:
h t = o t ⊙ tanh ( c t ) h_t = o_t \odot \tanh(c_t) ht=ot⊙tanh(ct)
因此整个大权重矩阵的维度是 4 h × 2 h 4h×2h 4h×2h。因为四个门是 4 h 4h 4h,而输入是 2 h 2h 2h包含上一时刻隐藏状态和当前输入,将它们拼接在一起。
4. MLLMs(Multimodal Large Language Models,多模态大语言模型)
我们现在常见的GPT,Gemini之类的都是多模态大语言模型,它们都是以Transformer为核心的系统。
它使用 Vit 把一张图片切成很多"patch token",像一句话的 token 一样,送进 Transformer Encoder,用 Attention 建模全局关系,用 FFN 做非线性变换,最后用一个 CLS token 做分类。
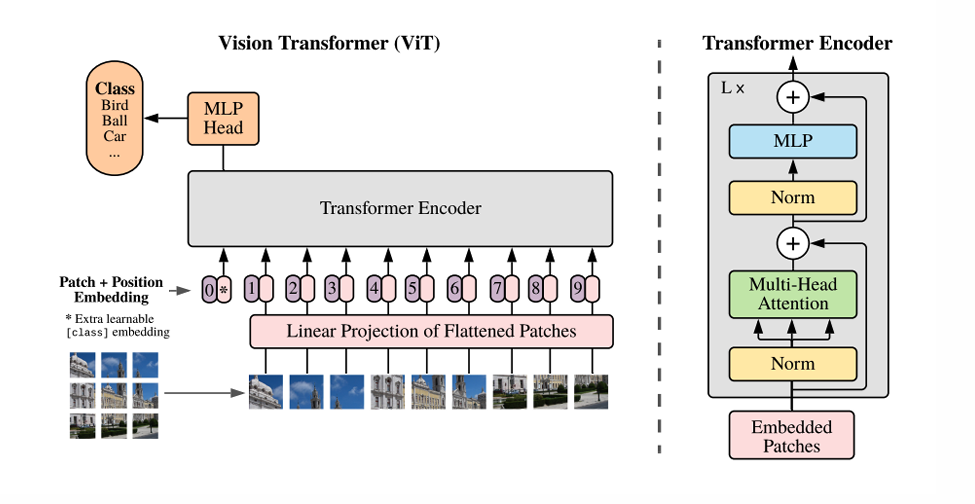
这里 Vit 就是 Transformer Encoder, 是视觉编码器,与传统 CNN 不同,它一上来就有全局视野(self-attention)。