目录
1.摘要
针对无人机辅助移动边缘计算系统中的无人机轨迹规划与任务卸载问题,本文提出了一种双目标蚁群算法,该算法在满足能量、时限、位置及任务优先级等多重约束的前提下,同时优化系统总成本与任务完成时间。通过引入具有不同目标偏好的异构蚁群,并设计可行解生成、解划分及信息素更新等关键机制,实现了对多目标问题的高效求解。
2.问题描述
系统中存在 n n n个感知设备 (SD),每个设备周期性地产生一个计算任务,所有任务同时释放并需在给定截止时间内完成。由于计算资源同构,任务的计算与通信时延与具体资源无关,每个任务由数据传输时间、处理时间、结果回传时间、任务位置和截止期限共同描述。计算资源由两类无人机(UAV)提供:低成本的预留无人机和高成本的按需无人机。无人机以固定平均速度飞行,飞行时间由距离决定,初始均部署在基站且电量充足,并可在任一基站快速更换电池。系统仅考虑无人机飞行能耗,其能耗与飞行速度相关,且受最大能量容量约束,计算与通信能耗不计入模型。
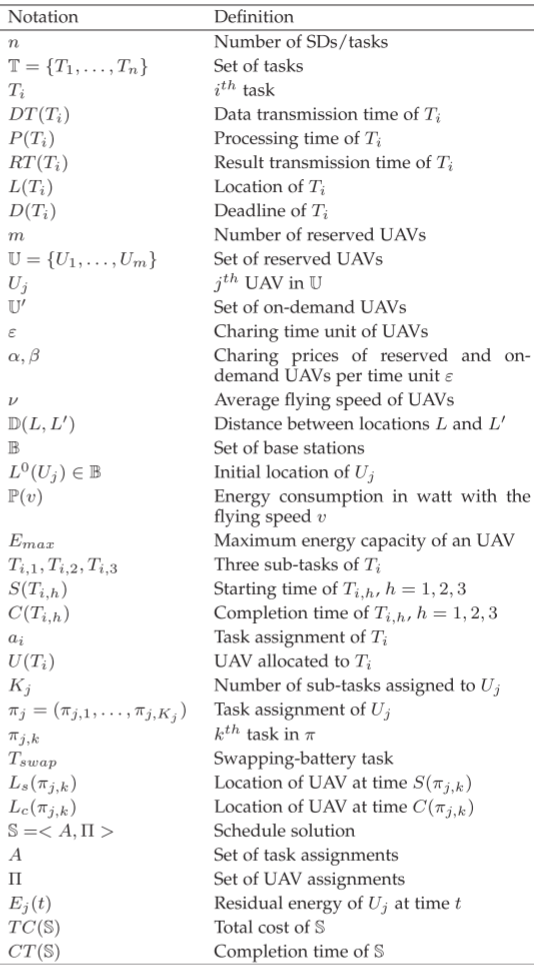
每个任务由无人机依次经历数据传输、数据计算和结果回传三个阶段,对应三个不可中断的子任务,同一时间无人机只能处理一个子任务。任务与无人机的调度通过子任务序列进行描述,并明确每个子任务的开始时间、完成时间及空间位置。
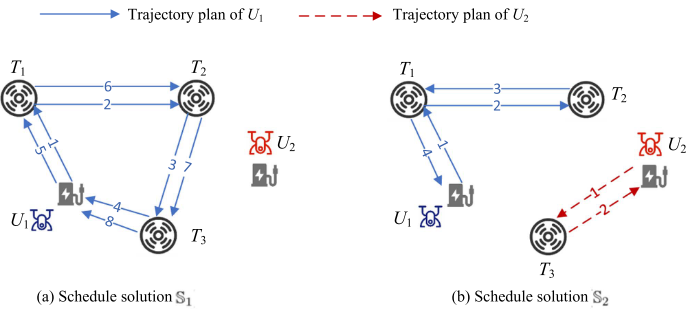
系统性能由两个目标衡量:总成本(由预留无人机和按需无人机的使用时间及其单位成本决定)和总体完成时间(所有任务的最晚完成时刻)。由于使用更多按需无人机可显著缩短完成时间但会提高成本,二者存在权衡关系,因此本文采用帕累托优化,以获得成本与完成时间之间的最优折衷解集。
3.双目标蚁群算法
bi-ACO 算法通过多个异构蚁群并行搜索解空间,维护全局帕累托解集。在迭代过程中,蚂蚁基于信息素和启发式信息构建可行解,并对非支配解进行进一步改进;随后依据帕累托解集更新各蚁群的信息素矩阵,直至满足终止条件。
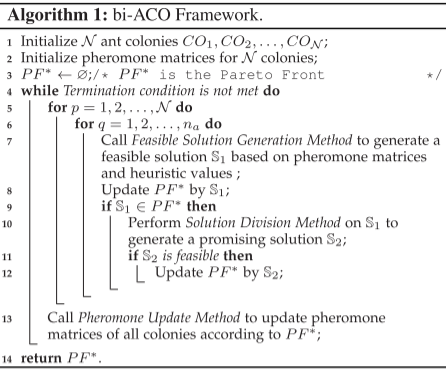
bi-ACO 通过多个异构蚁群并行搜索,每只蚂蚁在构造解时同时决定任务选择与插入位置。每个蚁群维护一对任务选择信息素矩阵和四对插入位置信息素矩阵,以分别引导任务选择及不同插入场景下的调度决策。任务选择概率结合成本与完成时间的启发式信息,并为不同蚁群和蚂蚁设置差异化的目标权重,从而实现对双目标解空间的多样化探索。
可行解生成方法(FSGM)
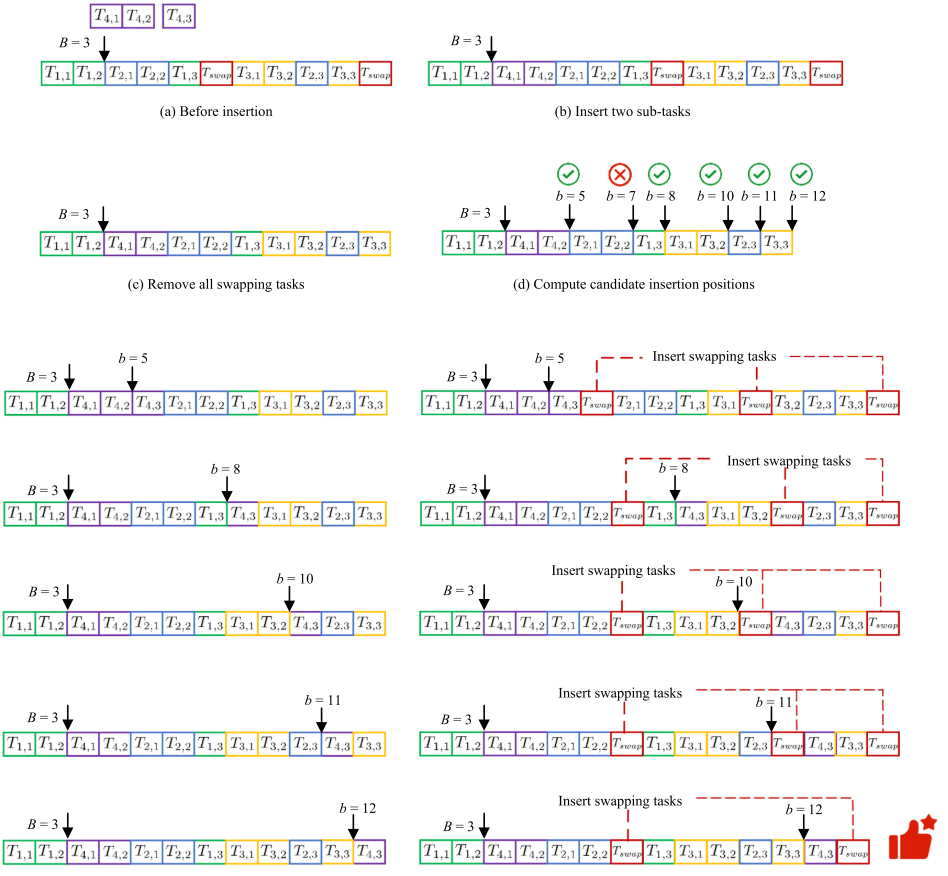
可行解生成方法(FSGM)通过逐步为无人机分配任务来构建满足约束的调度方案。蚂蚁基于信息素与启发式信息选择任务,并利用任务插入方法将其分阶段子任务合理嵌入无人机执行序列;当预留无人机不足时,引入按需无人机完成剩余任务,并通过交换不同类型无人机的任务分配以降低成本。为提升效率与可行性,算法引入换电子任务保证能量约束,并通过动态边界更新机制缩小插入搜索空间,从而实现高效可行解构造。
解划分方法(SDM)
SDM从完成时间最长的无人机中随机抽取部分任务,并将其重新分配给空闲的预留无人机或新引入的按需无人机,从而实现任务负载的重新平衡。在重构过程中,原有的换电子任务被移除并重新插入以保证能量可行性,最终通过无人机间任务交换进一步降低成本或改善性能。
信息素更新方法(PUM)
PUM根据全局帕累托前沿对信息素矩阵进行调整。首先将帕累托解按成本与完成时间排序并划分为若干组,使不同蚁群分别强化其偏好的解区域;随后对所有信息素进行挥发操作以避免早熟收敛;最后,通过信息素增强机制,提高与对应解组中优质解相关的任务选择与插入信息素值,从而引导后续搜索向多目标帕累托前沿均衡收敛。
4.结果展示

5.参考文献
1 Wang Y, Zhu J, Huang H, et al. Bi-objective ant colony optimization for trajectory planning and task offloading in uav-assisted mec systemsJ. IEEE Transactions on Mobile Computing, 2024, 23(12): 12360-12377.
6.代码获取
xx
7.算法辅导·应用定制·读者交流
xx