架构背景:实时控制的内核级演进
在工业自动化与机器人控制领域,EtherCAT 主站协议栈的性能上限,往往不再取决于协议本身,而是受限于底层操作系统的实时调度能力。作为 ETG(EtherCAT Technology Group)资深会员 acontis 开发的核心产品,EC-Master 长期以来致力于通过跨平台架构为不同操作系统提供标准化的主站实现。随着 Linux 实时扩展技术的迭代,EC-Master 目前已完成对 Xenomai 4 的正式支持。这一适配不仅仅是版本的更新,更标志着基于 Linux 的通用工业控制方案在硬实时(Hard Real-Time)性能上迈入了一个新的台阶,为解决高频控制下的抖动问题提供了更优的解法。
技术核心:Xenomai 4 的硬实时隔离机制
Xenomai 4 作为该系列的最新架构演进,在内核隔离机制与进程间通信效率上进行了底层重构。与传统的 Preempt-RT 软实时补丁方案不同,Xenomai 4 通过引入独立的实时微内核,从物理硬件层面接管了高优先级的中断请求。 这种"双核并行"的设计思路,使得运行其上的 EC-Master 主站任务能够完全独立于普通的 Linux 进程。
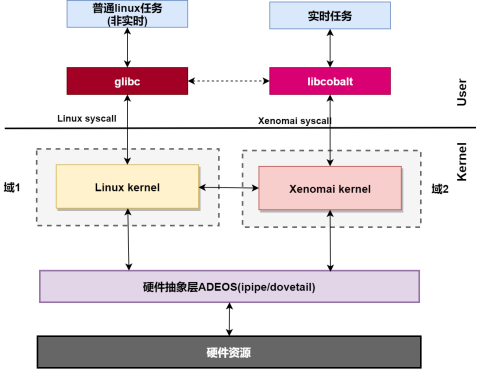
在实际运行中,非实时域(Linux Domain)的繁重任务------如 GUI 渲染、日志存储或网络堆栈处理------不再能抢占实时域的 CPU 资源。这种彻底的隔离,从根源上规避了通用操作系统带来的上下文切换开销与调度不确定性,为 EtherCAT 数据帧的精准收发清理了障碍。
性能落地:EC-Master 与双核架构的深度融合
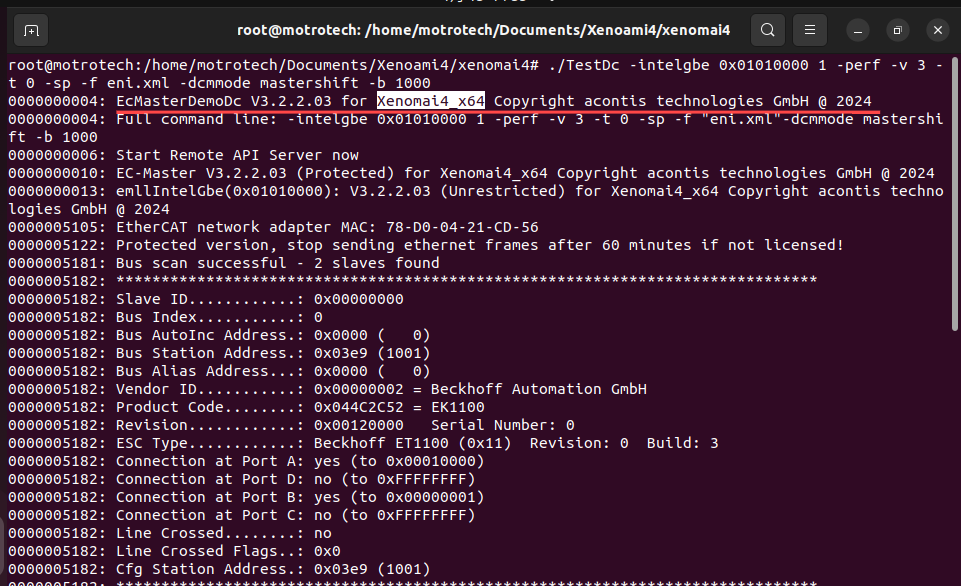
对于半导体设备、多轴机器人以及高频数据采集等对时间确定性有苛刻要求的场景,EC-Master 与 Xenomai 4 的结合提供了极具竞争力的技术底座。在适配架构中,EC-Master 的周期性任务(Cyclic Task)能够直接挂载于 Xenomai 的实时调度器之上。 EtherCAT 协议标志性的"On-the-fly"数据处理模式,配合 Xenomai 4 的零拷贝与低延迟中断响应机制,实现了主站侧亚毫秒级的精准同步。在多核处理器平台上的验证表明,该组合能够有效将通讯抖动控制在微秒级别,从而保证了多伺服轴同步控制在复杂工况下的鲁棒性,解决了以往 Linux 方案在极高负载下偶尔出现的"实时性逃逸"问题。
行业价值:构建高确定性的工业基座
此次适配工作的完成,意味着开发者可以在保留 Linux 丰富生态(如 Qt 界面库、TCP/IP 协议栈、文件系统)的同时,获得堪比专用 RTOS(如 VxWorks、QNX)的确定性体验。这极大地降低了高性能控制器的开发门槛与授权成本。 随着工业自动化向更高精度和更低延迟的方向发展,EC-Master 叠加 Xenomai 4 的架构方案,不仅是功能的叠加,更是底层机制的深度咬合。对于追求极致性能与自主可控的工业设备制造商而言,这将是构建下一代高性能控制器的关键基础设施。