目录
[一、进程切换与调度:CPU 资源的高效分配](#一、进程切换与调度:CPU 资源的高效分配)
[1.1 进程切换的本质:上下文切换](#1.1 进程切换的本质:上下文切换)
[1.2 Linux 2.6 内核 O (1) 调度算法:高效调度的基石](#1.2 Linux 2.6 内核 O (1) 调度算法:高效调度的基石)
[1.3 进程优先级:nice 值与 PRI 的关系](#1.3 进程优先级:nice 值与 PRI 的关系)
[1.4 并发与并行:多任务的两种实现方式](#1.4 并发与并行:多任务的两种实现方式)
[2.1 环境变量的核心概念](#2.1 环境变量的核心概念)
[2.2 环境变量的操作方式](#2.2 环境变量的操作方式)
[1. 命令行操作](#1. 命令行操作)
[2. 代码层面操作](#2. 代码层面操作)
[方式 1:main 函数第三个参数](#方式 1:main 函数第三个参数)
[方式 2:全局变量 environ](#方式 2:全局变量 environ)
[方式 3:系统调用 getenv/setenv](#方式 3:系统调用 getenv/setenv)
[2.3 环境变量的继承特性](#2.3 环境变量的继承特性)
[3.1 虚拟内存的核心作用](#3.1 虚拟内存的核心作用)
[3.2 进程地址空间布局](#3.2 进程地址空间布局)
[3.3 虚拟地址与物理地址的映射](#3.3 虚拟地址与物理地址的映射)
[3.4 虚拟内存的核心数据结构](#3.4 虚拟内存的核心数据结构)
在 Linux 系统中,进程是资源分配与调度的基本单位,其核心机制涵盖进程切换与调度、环境变量管理、虚拟内存三大核心模块。这些机制相互配合,确保了系统高效、安全、稳定地运行。本文将结合底层原理与实战代码,全面拆解这三大核心技术,帮助开发者从根源上理解 Linux 进程的工作机制。
一、进程切换与调度:CPU 资源的高效分配
1.1 进程切换的本质:上下文切换
进程切换是操作系统多任务并发的基础,其核心是CPU 上下文切换------ 即保存当前进程的运行状态,加载下一个进程的运行状态,实现进程间的无缝切换。
核心概念
- CPU 上下文:指 CPU 寄存器中的全部数据,包括程序计数器(PC,记录下一条指令地址)、栈指针(ESP/EBP)、通用寄存器(EAX/EBX 等)、状态寄存器(EFLAGS)等,是进程运行的 "快照"。
- 切换流程 :
- 保存当前进程的上下文数据到其 PCB(task_struct)对应的栈中;
- 从就绪队列中选择下一个待运行进程;
- 将选中进程的上下文数据从其栈中加载到 CPU 寄存器;
- 执行下一个进程的指令,完成切换。
关键原理
- CPU 寄存器仅有一套,但每个进程都有独立的上下文数据,切换时通过 "保存 - 加载" 实现进程状态的无缝衔接;
- 时间片是触发切换的重要条件:当进程时间片耗尽,操作系统会触发时钟中断,执行切换逻辑。
1.2 Linux 2.6 内核 O (1) 调度算法:高效调度的基石
Linux 2.6 内核采用 O (1) 调度算法,其核心优势是调度时间不随进程数量增加而增长,确保了高并发场景下的调度效率。
核心数据结构
调度算法的核心是runqueue(运行队列),每个 CPU 对应一个独立的runqueue,结构如下:
struct rq {
spinlock_t lock; // 队列锁,保证原子操作
unsigned long nr_running; // 就绪进程数
struct task_struct *curr, *idle; // 当前运行进程、空闲进程
struct prio_array *active, *expired; // 活跃队列、过期队列
struct prio_array arrays[2]; // 两个优先级数组,分别对应active和expired
int best_expired_prio; // 过期队列中最高优先级
// 其他负载均衡、统计相关字段...
};
// 优先级数组结构
struct prio_array {
unsigned int nr_active; // 该队列中活跃进程数
DECLARE_BITMAP(bitmap, MAX_PRIO+1); // 优先级位图,快速查找非空队列
struct list_head queue[MAX_PRIO]; // 优先级队列数组,下标为优先级(0-139)
};调度核心逻辑
- 优先级划分 :
- 实时优先级:0-99(高优先级,不参与时间片轮转);
- 普通优先级:100-139(对应 nice 值 - 20 至 19,nice 值越小,优先级越高)。
- 队列机制 :
- 活跃队列(active):存放时间片未耗尽的进程,按优先级分入不同队列(queue 0 为最高优先级);
- 过期队列(expired):存放时间片耗尽的进程;
- 当活跃队列为空时,交换 active 和 expired 指针,实现队列 "重置",无需重新计算时间片。
- 高效查找 :通过
bitmap位图快速定位最高优先级的非空队列,查找时间为 O (1)。
1.3 进程优先级:nice 值与 PRI 的关系
进程优先级决定了 CPU 资源的分配顺序,Linux 中通过PRI(静态优先级)和nice(优先级修正值)控制:
-
计算公式:
PRI(new) = PRI(old) + nice; -
nice 值范围:-20(最高优先级修正)至 19(最低优先级修正),共 40 个级别;
-
核心工具与函数:
功能 命令 / 函数 示例 查看优先级 ps -l 显示 PRI(优先级)和 NI(nice 值) 调整已有进程 nice 值 top + r 输入 PID 和目标 nice 值 启动时设置 nice 值 nice nice -n 5 ./test(设置 nice=5) 系统调用调整优先级 setpriority() setpriority(PRIO_PROCESS, pid, -10) 系统调用获取优先级 getpriority() getpriority(PRIO_PROCESS, pid)
1.4 并发与并行:多任务的两种实现方式
- 并发:多个进程在单个 CPU 上通过切换实现 "同时推进",本质是 "伪并行";
- 并行:多个进程在多个 CPU 上同时运行,需硬件支持。
二、环境变量:进程运行的全局配置
2.1 环境变量的核心概念
环境变量是操作系统中指定运行环境的参数,具有全局特性,可被子进程继承,常用于配置程序运行路径、用户信息、系统参数等。
常见环境变量
| 环境变量 | 作用 |
|---|---|
| PATH | 指定命令搜索路径,多个路径用冒号分隔 |
| HOME | 用户主目录(root 为 /root,普通用户为 /home/xxx) |
| SHELL | 当前使用的 Shell(默认 /bin/bash) |
| USER | 当前登录用户 |
2.2 环境变量的操作方式
1. 命令行操作
# 1. 查看单个环境变量
echo $PATH
# 2. 查看所有环境变量
env # 仅显示环境变量
set # 显示环境变量+本地Shell变量
# 3. 设置临时环境变量(当前Shell有效)
export MYENV="hello_linux"
# 4. 清除环境变量
unset MYENV
# 5. 永久设置环境变量(需修改配置文件)
echo 'export PATH=$PATH:/home/user/test' >> ~/.bashrc
source ~/.bashrc # 生效2. 代码层面操作
环境变量在程序中通过环境表(字符指针数组)存储,可通过三种方式访问:
方式 1:main 函数第三个参数
#include <stdio.h>
// argc:命令行参数个数,argv:命令行参数数组,env:环境变量数组
int main(int argc, char *argv[], char *env[]) {
int i = 0;
// 遍历环境变量数组(以NULL结尾)
while (env[i] != NULL) {
printf("env[%d]: %s\n", i, env[i]);
i++;
}
return 0;
}方式 2:全局变量 environ
#include <stdio.h>
// 声明全局环境变量指针(libc定义,无头文件声明)
extern char **environ;
int main() {
int i = 0;
while (environ[i] != NULL) {
printf("env[%d]: %s\n", i, environ[i]);
i++;
}
return 0;
}方式 3:系统调用 getenv/setenv
#include <stdio.h>
#include <stdlib.h>
int main() {
// 1. 获取环境变量
char *path = getenv("PATH");
if (path != NULL) {
printf("PATH: %s\n", path);
}
// 2. 设置环境变量(overwrite=1表示覆盖已有变量)
setenv("MYENV", "hello_process", 1);
printf("MYENV: %s\n", getenv("MYENV"));
// 3. 清除环境变量
unsetenv("MYENV");
printf("MYENV after unset: %s\n", getenv("MYENV"));
return 0;
}2.3 环境变量的继承特性
环境变量具有全局继承性:父进程的环境变量会自动被子进程继承,而普通 Shell 变量不会。
验证代码:
#include<stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <sys/wait.h> // 补充wait函数的头文件,避免编译警告
int main() {
// 设置环境变量(C语言中用setenv函数,替代Shell的export)
// 参数说明:变量名、值、是否覆盖已存在的变量(1=覆盖)
setenv("MYENV", "parent_env", 1);
// 创建子进程
pid_t pid = fork();
if (pid == -1) { // 增加fork失败的异常处理
perror("fork failed");
exit(1);
}
if (pid == 0) {
// 子进程:获取环境变量
char *env = getenv("MYENV");
printf("Child process MYENV: %s\n", env ? env : "NULL");
exit(0); // 子进程执行完后显式退出,避免继续执行父进程逻辑
} else {
// 父进程:等待子进程退出,避免僵尸进程
wait(NULL);
printf("Parent process: child exited\n");
}
return 0;
}运行结果 :子进程会输出Child process MYENV: parent_env,证明环境变量被子进程继承。
三、虚拟内存:进程的独立地址空间
3.1 虚拟内存的核心作用
虚拟内存是操作系统为进程提供的独立地址空间,进程访问的是虚拟地址,而非物理地址。其核心作用是:
- 隔离进程:每个进程拥有独立的虚拟地址空间,避免相互干扰;
- 安全保护:禁止进程直接访问物理内存,防止恶意程序篡改系统数据;
- 高效利用内存:支持 "延迟分配" 和 "内存交换",无需将进程全部加载到物理内存。
3.2 进程地址空间布局
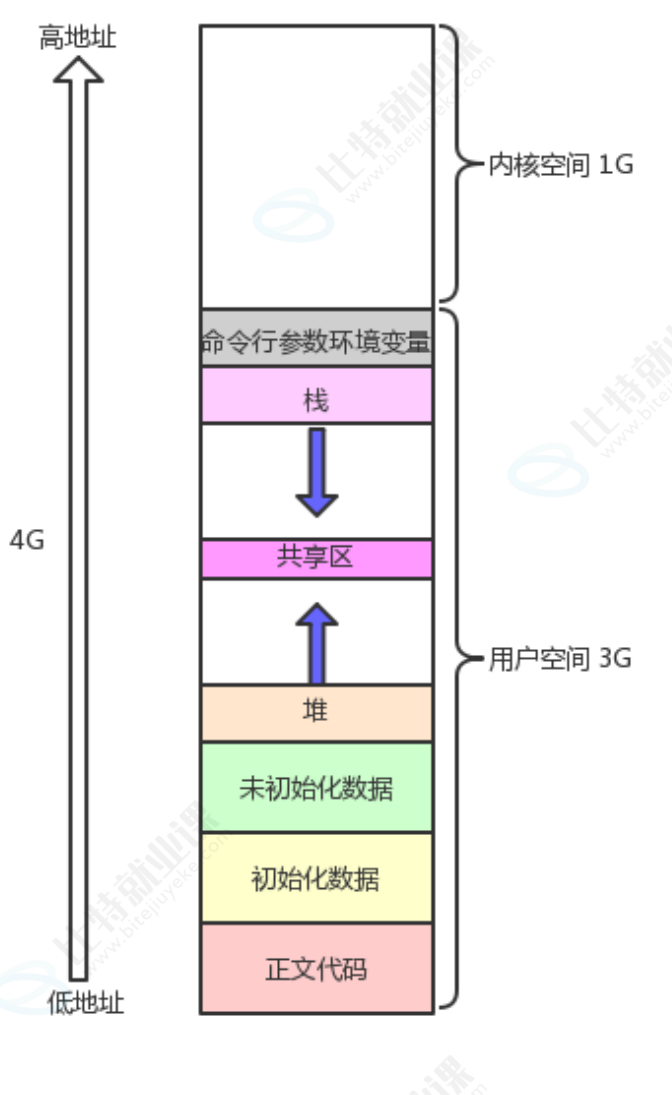
32 位 Linux 系统中,虚拟地址空间为 4GB,分为用户空间(3GB,0x00000000-0xBFFFFFFF)和内核空间(1GB,0xC0000000-0xFFFFFFFF)。用户空间布局从低地址到高地址如下:
| 地址区域 | 存储内容 |
|---|---|
| 正文代码(Text) | 程序指令(只读) |
| 初始化数据(Data) | 已初始化的全局变量、静态变量 |
| 未初始化数据(BSS) | 未初始化的全局变量、静态变量(默认初始化为 0) |
| 堆(Heap) | 动态内存分配区域(向上增长) |
| 共享区(MMAP) | 共享库、文件映射区域 |
| 栈(Stack) | 局部变量、函数参数(向下增长) |
| 命令行参数 + 环境变量 | argv 数组、env 数组 |
验证代码:
#include <stdio.h>
#include <stdlib.h>
// 全局变量
int g_val = 100; // 初始化数据区
int g_unval; // 未初始化数据区(BSS)
static int g_static = 200;// 静态初始化数据区
int main(int argc, char *argv[], char *env[]) {
const char *str = "helloworld"; // 只读字符串(正文代码区)
char *heap1 = malloc(10); // 堆区
char *heap2 = malloc(10);
char stack1[10]; // 栈区
char stack2[10];
// 打印各区域地址
printf("代码区(main): %p\n", main);
printf("只读字符串: %p\n", str);
printf("初始化全局变量: %p\n", &g_val);
printf("静态初始化变量: %p\n", &g_static);
printf("未初始化全局变量: %p\n", &g_unval);
printf("堆区1: %p\n", heap1);
printf("堆区2: %p\n", heap2);
printf("栈区1: %p\n", stack1);
printf("栈区2: %p\n", stack2);
printf("命令行参数argv[0]: %p\n", argv[0]);
printf("环境变量env[0]: %p\n", env[0]);
free(heap1);
free(heap2);
return 0;
}运行结果说明:地址从低到高依次为 "代码区→数据区→堆区→栈区→命令行参数 / 环境变量",堆区向上增长(heap2 > heap1),栈区向下增长(stack2 < stack1)。
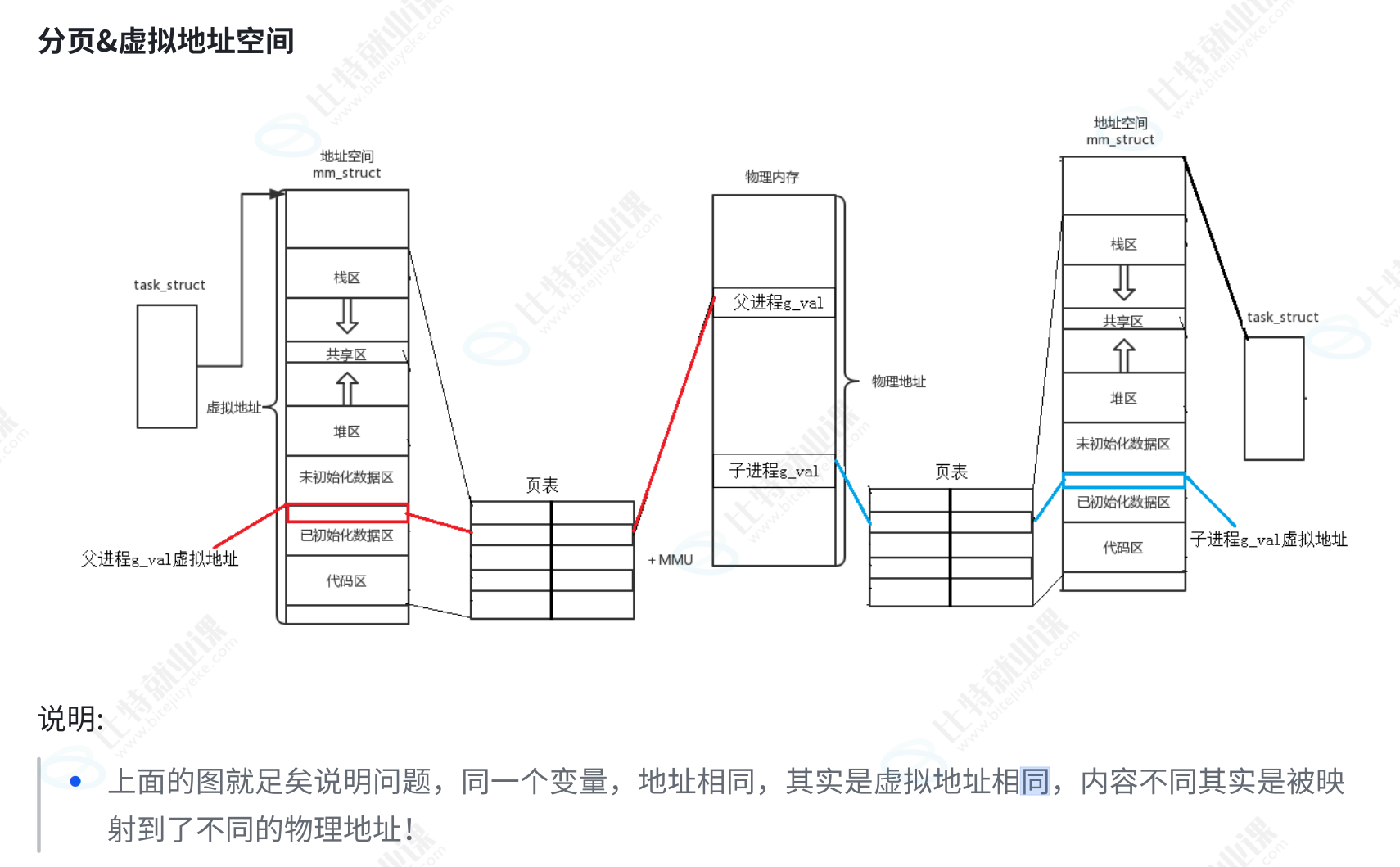
3.3 虚拟地址与物理地址的映射
进程访问的虚拟地址需通过页表(由 MMU 硬件和操作系统维护)转换为物理地址。核心机制如下:
- 分页机制:虚拟地址和物理地址均划分为 4KB(默认)的页框,映射以页为单位;
- 写时拷贝(Copy-On-Write):父子进程创建时共享物理内存页,当任一进程修改数据时,才为修改方分配新的物理页,避免冗余拷贝;
- 延迟分配:进程通过 malloc/new 申请内存时,仅分配虚拟地址空间,未实际分配物理内存,直到首次写入数据时才触发缺页中断,分配物理内存并建立映射。
写时拷贝验证代码:
#include <stdio.h>
#include <unistd.h>
#include <stdlib.h>
int g_val = 0; // 全局变量
int main() {
pid_t pid = fork();
if (pid < 0) {
perror("fork");
return 1;
} else if (pid == 0) {
// 子进程修改全局变量
g_val = 100;
printf("子进程: pid=%d, g_val=%d, 虚拟地址=%p\n", getpid(), g_val, &g_val);
} else {
// 父进程延迟读取,观察值是否变化
sleep(3);
printf("父进程: pid=%d, g_val=%d, 虚拟地址=%p\n", getpid(), g_val, &g_val);
}
sleep(1);
return 0;
}运行结果:
plaintext
子进程: pid=3046, g_val=100, 虚拟地址=0x80497e8
父进程: pid=3045, g_val=0, 虚拟地址=0x80497e8结论:父子进程的虚拟地址相同,但物理地址不同(通过写时拷贝分离),因此变量值不同。
3.4 虚拟内存的核心数据结构
Linux 通过mm_struct(内存描述符)和vm_area_struct(虚拟内存区域)管理进程的虚拟地址空间:
- mm_struct :每个进程对应一个
mm_struct,存储整个虚拟地址空间的信息,如代码段 / 数据段 / 栈区的起止地址、虚拟内存区域链表等; - vm_area_struct :描述一个连续的虚拟内存区域(如堆区、共享库区),每个区域对应一个
vm_area_struct,通过链表和红黑树组织(虚拟区少则用链表,多则用红黑树)。
核心结构定义:
// 内存描述符
struct mm_struct {
struct vm_area_struct *mmap; // 虚拟内存区域链表
struct rb_root mm_rb; // 虚拟内存区域红黑树
unsigned long start_code, end_code; // 代码段起止地址
unsigned long start_data, end_data; // 数据段起止地址
unsigned long start_brk, brk; // 堆区起止地址
unsigned long start_stack; // 栈区起始地址
// 其他字段...
};
// 虚拟内存区域
struct vm_area_struct {
unsigned long vm_start; // 区域起始虚拟地址
unsigned long vm_end; // 区域结束虚拟地址
struct vm_area_struct *vm_next; // 下一个虚拟区域
struct rb_node vm_rb; // 红黑树节点
unsigned long vm_flags; // 区域属性(如可读、可写、可执行)
struct mm_struct *vm_mm; // 所属的内存描述符
// 其他字段...
};四、总结
Linux 进程的三大核心机制相互关联、缺一不可:
- 进程切换与调度:通过 O (1) 算法和上下文切换,实现 CPU 资源的高效分配,支撑多任务并发;
- 环境变量:为进程提供全局配置,支持父子进程继承,简化程序部署与配置;
- 虚拟内存:通过地址隔离、写时拷贝、延迟分配等机制,保障进程安全,提高内存利用率。
理解这些底层机制,不仅能帮助开发者排查进程调度、内存泄漏、环境配置等问题,更能为编写高效、稳定的 Linux 应用奠定基础。后续可进一步深入学习进程通信、内存管理算法等进阶内容,全面掌握 Linux 系统编程核心技能。
