目录
[2.1 马尔可夫核心性质(无后效性)](#2.1 马尔可夫核心性质(无后效性))
[2.2 模型核心要素](#2.2 模型核心要素)
[2.3 三类核心模型对比](#2.3 三类核心模型对比)
[4.1 实验 1:马尔可夫链(MC)------ 股票涨跌预测仿真](#4.1 实验 1:马尔可夫链(MC)—— 股票涨跌预测仿真)
[4.1.1 问题定义](#4.1.1 问题定义)
[4.1.2 模型参数设置](#4.1.2 模型参数设置)
[4.1.3 仿真与可视化代码](#4.1.3 仿真与可视化代码)
[4.2 实验 2:隐马尔可夫模型(HMM)------ 词性标注仿真](#4.2 实验 2:隐马尔可夫模型(HMM)—— 词性标注仿真)
[4.2.1 问题定义](#4.2.1 问题定义)
[4.2.2 模型参数设置](#4.2.2 模型参数设置)
[4.2.3 仿真与可视化代码](#4.2.3 仿真与可视化代码)
[4.3 实验 3:马尔可夫决策过程(MDP)------ 机器人路径规划仿真](#4.3 实验 3:马尔可夫决策过程(MDP)—— 机器人路径规划仿真)
[4.3.1 问题定义](#4.3.1 问题定义)
[4.3.2 模型参数设置](#4.3.2 模型参数设置)
[4.3.3 仿真与可视化代码](#4.3.3 仿真与可视化代码)
[5.1 马尔可夫链(MC)结果](#5.1 马尔可夫链(MC)结果)
[5.2 隐马尔可夫模型(HMM)结果](#5.2 隐马尔可夫模型(HMM)结果)
[5.3 马尔可夫决策过程(MDP)结果](#5.3 马尔可夫决策过程(MDP)结果)
一、实验目的
- 深入理解马尔可夫模型的核心特性(无后效性)及数学表述。
- 掌握马尔可夫链(MC)、隐马尔可夫模型(HMM)、马尔可夫决策过程(MDP)的建模逻辑与适用场景。
- 通过 MATLAB 仿真实现三类核心模型,可视化状态转移过程与结果,验证模型性能。
- 学会基于马尔可夫模型解决时序数据预测、序列推断、最优决策等实际问题。
二、实验原理
2.1 马尔可夫核心性质(无后效性)
对随机过程\(\{X_t\}\)(t为离散时间步),若满足:\(P(X_{t+1}=j \mid X_t=i, X_{t-1}=i_{t-1}, \dots, X_0=i_0) = P(X_{t+1}=j \mid X_t=i)\)则称该过程具有马尔可夫性质。核心含义:系统未来状态仅由当前状态决定,与历史状态无关,极大简化时序建模的复杂度。
2.2 模型核心要素
- 状态空间\(\mathcal{S}\):系统所有可能状态的集合(如\(\mathcal{S}=\{s_0, s_1, ..., s_{N-1}\}\),N为状态数)。
- 转移概率矩阵\(\mathbf{P}\):\(\mathbf{P}{i,j}=P(X{t+1}=j \mid X_t=i)\),满足行和为 1(\(\sum_{j=0}^{N-1} \mathbf{P}_{i,j}=1\))。
- 初始分布\(\pi\):\(t=0\)时刻的状态概率分布(\(\pi_i=P(X_0=i)\),\(\sum_{i=0}^{N-1} \pi_i=1\))。
- 观测空间\(\mathcal{O}\)(HMM 专属):系统可观测变量的集合,通过观测序列\(\{O_0, O_1, ..., O_T\}\)推断隐藏状态。
- 动作空间\(\mathcal{A}\)与奖励函数R(MDP 专属):动作影响状态转移,奖励函数量化状态 / 动作的收益。
2.3 三类核心模型对比
| 模型类型 | 状态可观测性 | 核心组件 | 核心算法 | 典型应用场景 |
|---|---|---|---|---|
| 马尔可夫链(MC) | 完全可观测 | 状态空间、转移概率矩阵、初始分布 | 状态演化仿真、稳态分析 | 股票涨跌预测、人口流动模拟 |
| 隐马尔可夫模型(HMM) | 部分可观测 | 隐藏状态空间、观测空间、转移矩阵、发射矩阵、初始分布 | 前向 - 后向算法、Viterbi 算法 | 语音识别、词性标注、生物序列分析 |
| 马尔可夫决策过程(MDP) | 完全可观测 | 状态空间、动作空间、转移矩阵、奖励函数、折扣因子 | Q-Learning、策略迭代 | 机器人路径规划、游戏 AI、资源调度 |
三、实验环境
- 软件:MATLAB R2022b 及以上
- 核心工具箱:Statistics and Machine Learning Toolbox、Signal Processing Toolbox
四、实验内容与仿真实现
4.1 实验 1:马尔可夫链(MC)------ 股票涨跌预测仿真
4.1.1 问题定义
假设股票状态分为 "上涨(s0)""下跌(s1)""横盘(s2)",基于历史数据得到转移概率矩阵,仿真未来 30 天的股票状态演化,并分析稳态分布。
4.1.2 模型参数设置
Matlab
clear; clc; close all;
%% 1. 马尔可夫链参数定义
S = {'上涨(s0)', '下跌(s1)', '横盘(s2)'}; % 状态空间
N = length(S); % 状态数:3
% 转移概率矩阵 P(i,j):从状态i到状态j的概率
P = [0.3, 0.4, 0.3; % s0→s0:30%, s0→s1:40%, s0→s2:30%
0.4, 0.3, 0.3; % s1→s0:40%, s1→s1:30%, s1→s2:30%
0.2, 0.2, 0.6]; % s2→s0:20%, s2→s1:20%, s2→s2:60%
pi_init = [0.4, 0.3, 0.3]; % 初始分布:初始上涨40%、下跌30%、横盘30%
T = 30; % 仿真时间步(30天)
num_trials = 1000; % 蒙特卡洛仿真次数(降低随机误差)4.1.3 仿真与可视化代码
Matlab
%% 2. 马尔可夫链仿真(单次与蒙特卡洛批量)
% 单次状态演化
state_seq_single = mc_simulate_single(P, pi_init, T);
% 蒙特卡洛批量仿真:统计各时间步状态概率分布
state_prob_mc = zeros(N, T+1); % state_prob_mc(i,t+1):第t步状态i的概率
for trial = 1:num_trials
state_seq = mc_simulate_single(P, pi_init, T);
for t = 0:T
for i = 1:N
if state_seq(t+1) == i-1 % 状态索引从0开始
state_prob_mc(i, t+1) = state_prob_mc(i, t+1) + 1;
end
end
end
end
state_prob_mc = state_prob_mc / num_trials; % 归一化为概率
% 3. 稳态分布计算(求解πP=π)
pi_steady = mc_steady_state(P);
%% 4. 可视化结果
figure('Position', [50, 50, 1200, 800]);
% 子图1:单次状态演化序列
subplot(2,2,1);
plot(0:T, state_seq_single, 'o-', 'LineWidth', 1.5, 'MarkerSize', 6);
set(gca, 'XTick', 0:T, 'YTick', 0:N-1, 'YTickLabel', S);
xlabel('时间步(天)', 'FontSize', 10);
ylabel('股票状态', 'FontSize', 10);
title('马尔可夫链:单次股票状态演化', 'FontSize', 11, 'FontWeight', 'bold');
grid on; box on;
% 子图2:各状态概率演化(蒙特卡洛结果)
subplot(2,2,2);
colors = ['r', 'g', 'b'];
for i = 1:N
plot(0:T, state_prob_mc(i,:), colors(i), 'LineWidth', 1.5, 'DisplayName', S{i});
hold on;
end
xlabel('时间步(天)', 'FontSize', 10);
ylabel('状态概率', 'FontSize', 10);
title('马尔可夫链:各状态概率演化(1000次蒙特卡洛)', 'FontSize', 11, 'FontWeight', 'bold');
legend('Location', 'best', 'FontSize', 9);
grid on; box on; hold off;
% 子图3:转移概率矩阵热力图
subplot(2,2,3);
imagesc(P);
colormap('jet');
colorbar;
textStrings = num2str(P(:), '%.2f'); % 显示两位小数
textStrings = strtrim(cellstr(textStrings));
[x, y] = meshgrid(1:size(P,2), 1:size(P,1));
text(x(:), y(:), textStrings(:), 'HorizontalAlignment', 'center', 'FontSize', 12);
set(gca, 'XTick', 1:N, 'XTickLabel', S, 'YTick', 1:N, 'YTickLabel', S);
title('转移概率矩阵热力图', 'FontSize', 11, 'FontWeight', 'bold');
xlabel('目标状态', 'FontSize', 10);
ylabel('初始状态', 'FontSize', 10);
% 子图4:稳态分布
subplot(2,2,4);
bar(pi_steady, 'FaceColor', 'c', 'EdgeColor', 'black', 'LineWidth', 1);
set(gca, 'XTick', 1:N, 'XTickLabel', S);
xlabel('股票状态', 'FontSize', 10);
ylabel('稳态概率', 'FontSize', 10);
title(['马尔可夫链:稳态分布(πP=π)', sprintf('\n上涨:%.3f, 下跌:%.3f, 横盘:%.3f', ...
pi_steady(1), pi_steady(2), pi_steady(3))], 'FontSize', 11, 'FontWeight', 'bold');
grid on; box on;
sgtitle('马尔可夫链(MC)------ 股票涨跌预测仿真', 'FontSize', 13, 'FontWeight', 'bold');
%% 附加分析:计算理论n步转移概率
fprintf('\n=== 马尔可夫链分析结果 ===\n');
fprintf('转移概率矩阵 P:\n');
disp(P);
fprintf('初始分布 pi_init: [%.3f, %.3f, %.3f]\n', pi_init);
fprintf('稳态分布 pi_steady: [%.3f, %.3f, %.3f]\n', pi_steady);
% 计算5步转移概率矩阵
P_5 = P^5;
fprintf('\n5步转移概率矩阵 P^5:\n');
disp(P_5);
% 检查稳态分布的精度
pi_check = pi_steady * P;
error = max(abs(pi_check - pi_steady));
fprintf('\n稳态分布验证误差: %.6f\n', error);
if error < 1e-6
fprintf('稳态分布验证通过!\n');
else
fprintf('警告:稳态分布可能存在误差!\n');
end
%% 自定义函数 - 马尔可夫链单次仿真
function state_sequence = mc_simulate_single(P, pi_init, T)
% 输入:
% P: N×N转移概率矩阵
% pi_init: 1×N初始概率分布
% T: 仿真步数
% 输出:
% state_sequence: 1×(T+1)状态序列(从第0步到第T步)
N = size(P, 1); % 状态数
state_sequence = zeros(1, T+1);
% 第0步:根据初始分布随机选择初始状态
state_sequence(1) = randsample(N, 1, true, pi_init) - 1; % 状态索引从0开始
% 第1步到第T步:根据转移概率矩阵进行状态转移
for t = 2:(T+1)
current_state = state_sequence(t-1) + 1; % 转换为1-based索引
% 根据当前状态的转移概率行,选择下一个状态
next_state = randsample(N, 1, true, P(current_state, :));
state_sequence(t) = next_state - 1; % 转回0-based索引
end
end
%% 自定义函数 - 计算稳态分布
function pi_steady = mc_steady_state(P)
% 输入:
% P: N×N转移概率矩阵
% 输出:
% pi_steady: 1×N稳态概率分布(满足 πP = π)
N = size(P, 1);
% 方法1:求解线性方程组 (P' - I)π' = 0,且 Σπ = 1
% 构造线性方程组:[(P' - I); ones(1,N)] * π = [zeros(N,1); 1]
A = [P' - eye(N); ones(1, N)];
b = [zeros(N, 1); 1];
% 使用最小二乘法求解
pi_steady = (A' * A) \ (A' * b);
pi_steady = pi_steady';
% 确保概率为正且和为1
pi_steady = max(pi_steady, 0);
pi_steady = pi_steady / sum(pi_steady);
% 方法2(备选):迭代法
% pi = ones(1, N) / N; % 任意初始分布
% for i = 1:1000
% pi_new = pi * P;
% if max(abs(pi_new - pi)) < 1e-10
% break;
% end
% pi = pi_new;
% end
% pi_steady = pi;
end4.2 实验 2:隐马尔可夫模型(HMM)------ 词性标注仿真
4.2.1 问题定义
假设隐藏状态为 "名词(s0)""动词(s1)""形容词(s2)",观测值为 "苹果(o0)""跑步(o1)""美丽(o2)""高山(o3)""跳跃(o4)",通过 HMM 的 Viterbi 算法从观测序列推断隐藏词性。
4.2.2 模型参数设置
Matlab
%% 1. HMM参数定义
% 隐藏状态(词性)
S_hmm = {'名词(s0)', '动词(s1)', '形容词(s2)'};
N_hmm = length(S_hmm); % 隐藏状态数:3
% 观测空间(词汇)
O_hmm = {'苹果(o0)', '跑步(o1)', '美丽(o2)', '高山(o3)', '跳跃(o4)'};
M_hmm = length(O_hmm); % 观测数:5
% 转移概率矩阵 A(i,j):从隐藏状态i到j的概率
A = [0.5, 0.2, 0.3; % 名词→名词:50%, 名词→动词:20%, 名词→形容词:30%
0.1, 0.6, 0.3; % 动词→名词:10%, 动词→动词:60%, 动词→形容词:30%
0.2, 0.1, 0.7]; % 形容词→名词:20%, 形容词→动词:10%, 形容词→形容词:70%
% 发射概率矩阵 B(i,k):隐藏状态i生成观测k的概率
B = [0.6, 0.05, 0.05, 0.2, 0.1; % 名词→苹果:60%, 名词→高山:20%, 其他低概率
0.05, 0.7, 0.05, 0.05, 0.15; % 动词→跑步:70%, 动词→跳跃:15%, 其他低概率
0.05, 0.05, 0.8, 0.05, 0.05]; % 形容词→美丽:80%, 其他低概率
% 初始隐藏状态分布
pi_hmm = [0.4, 0.3, 0.3]; % 初始名词40%、动词30%、形容词30%
% 测试观测序列(对应词汇:苹果→跑步→美丽→高山)
O_seq = [0, 1, 2, 3]; % 观测序列索引
T_hmm = length(O_seq); % 观测序列长度4.2.3 仿真与可视化代码
Matlab
%% 2. HMM核心算法调用
% Viterbi算法:从观测序列推断最优隐藏状态序列
[best_state_seq, delta, psi] = hmm_viterbi(A, B, pi_hmm, O_seq);
% 前向-后向算法:计算各时间步隐藏状态概率
[alpha, beta, gamma] = hmm_forward_backward(A, B, pi_hmm, O_seq);
%% 3. 可视化结果
figure('Position', [50, 50, 1200, 800]);
% 子图1:Viterbi最优状态序列(词性标注结果)
subplot(2,2,1);
plot(1:T_hmm, best_state_seq, 'o-', 'LineWidth', 2, 'MarkerSize', 8);
set(gca, 'XTick', 1:T_hmm, 'XTickLabel', {O_hmm{O_seq(1)+1}, O_hmm{O_seq(2)+1}, O_hmm{O_seq(3)+1}, O_hmm{O_seq(4)+1}});
set(gca, 'YTick', 0:N_hmm-1, 'YTickLabel', S_hmm);
xlabel('观测词汇', 'FontSize', 10);
ylabel('推断的词性(隐藏状态)', 'FontSize', 10);
title('HMM-Viterbi:词性标注结果', 'FontSize', 11, 'FontWeight', 'bold');
grid on; box on;
% 子图2:各时间步隐藏状态概率(前向-后向算法)
subplot(2,2,2);
colors = ['r', 'g', 'b'];
for i = 1:N_hmm
plot(1:T_hmm, gamma(i,:), colors(i), 'LineWidth', 1.5, 'DisplayName', S_hmm{i});
hold on;
end
xlabel('时间步(观测词汇)', 'FontSize', 10);
ylabel('隐藏状态概率', 'FontSize', 10);
title('HMM-前向后向:各时间步词性概率', 'FontSize', 11, 'FontWeight', 'bold');
legend('Location', 'best', 'FontSize', 9);
grid on; box on; hold off;
% 子图3:转移概率矩阵热力图(修改为兼容版本)
subplot(2,2,3);
imagesc(A);
colormap('jet');
colorbar;
textStrings = num2str(A(:), '%.2f'); % 显示两位小数
textStrings = strtrim(cellstr(textStrings));
[x, y] = meshgrid(1:size(A,2), 1:size(A,1));
text(x(:), y(:), textStrings(:), 'HorizontalAlignment', 'center', 'FontSize', 12);
set(gca, 'XTick', 1:N_hmm, 'XTickLabel', S_hmm, 'YTick', 1:N_hmm, 'YTickLabel', S_hmm);
title('隐藏状态转移概率矩阵', 'FontSize', 11, 'FontWeight', 'bold');
xlabel('目标状态', 'FontSize', 10);
ylabel('初始状态', 'FontSize', 10);
% 子图4:发射概率矩阵热力图(修改为兼容版本)
subplot(2,2,4);
imagesc(B);
colormap('jet');
colorbar;
textStrings = num2str(B(:), '%.2f'); % 显示两位小数
textStrings = strtrim(cellstr(textStrings));
[x, y] = meshgrid(1:size(B,2), 1:size(B,1));
text(x(:), y(:), textStrings(:), 'HorizontalAlignment', 'center', 'FontSize', 8);
set(gca, 'XTick', 1:M_hmm, 'XTickLabel', O_hmm, 'YTick', 1:N_hmm, 'YTickLabel', S_hmm);
title('发射概率矩阵(状态→观测)', 'FontSize', 11, 'FontWeight', 'bold');
xlabel('观测词汇', 'FontSize', 10);
ylabel('隐藏状态', 'FontSize', 10);
sgtitle('隐马尔可夫模型(HMM)------ 词性标注仿真', 'FontSize', 13, 'FontWeight', 'bold');
%% 4. 显示详细结果
fprintf('\n=== HMM词性标注结果 ===\n');
fprintf('观测序列:');
for t = 1:T_hmm
fprintf('%s ', O_hmm{O_seq(t)+1});
end
fprintf('\n');
fprintf('Viterbi最优隐藏状态序列:');
for t = 1:T_hmm
fprintf('%s ', S_hmm{best_state_seq(t)+1});
end
fprintf('\n');
fprintf('\n各时间步隐藏状态概率(前向-后向算法):\n');
fprintf('时间步\t\t名词\t\t动词\t\t形容词\n');
for t = 1:T_hmm
fprintf('t=%d(%s)\t%.4f\t\t%.4f\t\t%.4f\n', ...
t, O_hmm{O_seq(t)+1}, gamma(1,t), gamma(2,t), gamma(3,t));
end
%% 附加:计算观测序列概率
fprintf('\n=== 附加分析 ===\n');
% 计算观测序列概率(使用前向算法)
P_O = sum(alpha(:, T_hmm));
fprintf('观测序列概率 P(O|λ) = %.6e\n', P_O);
% 计算对数似然(避免下溢)
log_P_O = 0;
for t = 1:T_hmm
obs_idx = O_seq(t) + 1;
if t == 1
log_P_O = log(sum(pi .* B(:, obs_idx)'));
else
log_P_O = log_P_O + log(sum(alpha(:, t-1)' * A .* repmat(B(:, obs_idx)', N_hmm, 1), 'all'));
end
end
fprintf('观测序列对数似然 log P(O|λ) = %.6f\n', log_P_O);
%% 自定义函数:Viterbi算法
function [best_state_seq, delta, psi] = hmm_viterbi(A, B, pi, O_seq)
% Viterbi算法:寻找最优隐藏状态序列
% 输入:
% A: N×N 转移概率矩阵 (a_ij = P(s_j|s_i))
% B: N×M 发射概率矩阵 (b_i(o_k) = P(o_k|s_i))
% pi: 1×N 初始状态概率
% O_seq: 1×T 观测序列(观测索引,从0开始)
% 输出:
% best_state_seq: 1×T 最优隐藏状态序列(状态索引,从0开始)
% delta: N×T Viterbi路径概率
% psi: N×T 回溯指针
N = size(A, 1); % 隐藏状态数
T = length(O_seq); % 观测序列长度
% 初始化
delta = zeros(N, T);
psi = zeros(N, T);
% 步骤1:初始化 (t=1)
for i = 1:N
delta(i, 1) = pi(i) * B(i, O_seq(1)+1);
psi(i, 1) = 0; % 初始状态没有前驱
end
% 步骤2:递推 (t=2:T)
for t = 2:T
obs_idx = O_seq(t) + 1; % 转换为1-based索引
for j = 1:N
% 寻找最大概率路径
[max_val, max_idx] = max(delta(:, t-1) .* A(:, j));
delta(j, t) = max_val * B(j, obs_idx);
psi(j, t) = max_idx - 1; % 存储前驱状态索引(0-based)
end
end
% 步骤3:终止和回溯
% 找到最终最大概率
[~, best_last_state] = max(delta(:, T));
best_state_seq = zeros(1, T);
best_state_seq(T) = best_last_state - 1; % 转换为0-based索引
% 回溯得到完整序列
for t = T-1:-1:1
best_state_seq(t) = psi(best_state_seq(t+1)+1, t+1);
end
end
%% 自定义函数:前向-后向算法
function [alpha, beta, gamma] = hmm_forward_backward(A, B, pi, O_seq)
% 前向-后向算法:计算给定观测序列下各时刻的状态概率
% 输入:
% A: N×N 转移概率矩阵
% B: N×M 发射概率矩阵
% pi: 1×N 初始状态概率
% O_seq: 1×T 观测序列(观测索引,从0开始)
% 输出:
% alpha: N×T 前向概率
% beta: N×T 后向概率
% gamma: N×T 各时刻状态概率
N = size(A, 1); % 隐藏状态数
T = length(O_seq); % 观测序列长度
%% 前向算法
alpha = zeros(N, T);
% 初始化
for i = 1:N
alpha(i, 1) = pi(i) * B(i, O_seq(1)+1);
end
% 递推
for t = 2:T
obs_idx = O_seq(t) + 1; % 转换为1-based索引
for j = 1:N
alpha(j, t) = B(j, obs_idx) * sum(alpha(:, t-1) .* A(:, j));
end
% 数值稳定:归一化
alpha(:, t) = alpha(:, t) / sum(alpha(:, t));
end
%% 后向算法
beta = zeros(N, T);
% 初始化
beta(:, T) = 1;
% 递推
for t = T-1:-1:1
obs_idx_next = O_seq(t+1) + 1; % 下一个观测的索引
for i = 1:N
beta(i, t) = sum(A(i, :)' .* B(:, obs_idx_next) .* beta(:, t+1));
end
% 数值稳定:归一化
beta(:, t) = beta(:, t) / sum(beta(:, t));
end
%% 计算gamma:各时刻状态概率
gamma = zeros(N, T);
for t = 1:T
gamma(:, t) = alpha(:, t) .* beta(:, t);
gamma(:, t) = gamma(:, t) / sum(gamma(:, t)); % 归一化
end
end4.3 实验 3:马尔可夫决策过程(MDP)------ 机器人路径规划仿真
4.3.1 问题定义
机器人在 5×5 网格中移动,目标是从起点(1,1)到达终点(5,5),避开障碍(3,3)。状态为网格坐标(共 25 个状态),动作包括 "上、下、左、右",奖励函数定义为:终点奖励 + 100,障碍奖励 - 50,其他状态奖励 - 1(鼓励快速到达)。通过 Q-Learning 算法学习最优策略。
4.3.2 模型参数设置
Matlab
clear; clc; close all;
%% 1. MDP参数定义
% 网格环境设置(5×5)
grid_size = [5, 5];
num_states = grid_size(1) * grid_size(2); % 状态数:25(状态索引=行号-1 + (列号-1)*grid_size(1))
A_mdp = {'上', '下', '左', '右'}; % 动作空间
num_actions = length(A_mdp); % 动作数:4
% 障碍与终点设置
obstacle = [3, 3]; % 障碍坐标(行,列)
goal = [5, 5]; % 终点坐标
% 奖励函数:R(s,a),s为状态索引,a为动作索引
R = -1 * ones(num_states, num_actions); % 默认奖励-1
goal_state = goal(1)-1 + (goal(2)-1)*grid_size(1);
obstacle_state = obstacle(1)-1 + (obstacle(2)-1)*grid_size(1);
for a = 1:num_actions
R(goal_state+1, a) = 100; % 终点奖励+100
R(obstacle_state+1, a) = -50; % 障碍奖励-50
end
% Q-Learning参数
alpha = 0.1; % 学习率
gamma = 0.9; % 折扣因子
epsilon = 0.1; % 探索概率(ε-greedy)
num_episodes = 1000; % 训练回合数
max_steps_per_episode = 100; % 每回合最大步数4.3.3 仿真与可视化代码
Matlab
%% 2. Q-Learning训练
[Q_table, reward_history, success_rate] = mdp_q_learning(grid_size, num_states, num_actions, R, obstacle, goal, alpha, gamma, epsilon, num_episodes, max_steps_per_episode);
% 提取最优策略
optimal_policy = zeros(grid_size(1), grid_size(2)); % optimal_policy(行,列)=最优动作索引
for i = 1:grid_size(1)
for j = 1:grid_size(2)
state = (i-1) + (j-1)*grid_size(1);
[~, best_action] = max(Q_table(state+1, :));
optimal_policy(i,j) = best_action;
end
end
% 障碍处策略设为-1(无效)
optimal_policy(obstacle(1), obstacle(2)) = -1;
% 生成最优路径
start = [1, 1]; % 起点
optimal_path = mdp_generate_optimal_path(optimal_policy, start, goal, obstacle, grid_size);
%% 3. 可视化结果
figure('Position', [50, 50, 1200, 800]);
% 子图1:训练奖励演化
subplot(2,2,1);
plot(1:num_episodes, reward_history, 'b-', 'LineWidth', 1);
xlabel('训练回合数', 'FontSize', 10);
ylabel('每回合总奖励', 'FontSize', 10);
title('MDP-Q-Learning:训练奖励演化', 'FontSize', 11, 'FontWeight', 'bold');
grid on; box on;
% 子图2:成功到达率演化(每100回合平均)
subplot(2,2,2);
window = 100;
success_rate_smoothed = movmean(success_rate, window);
plot(1:num_episodes, success_rate_smoothed, 'r-', 'LineWidth', 1.5);
xlabel('训练回合数', 'FontSize', 10);
ylabel('成功到达率(滑动平均)', 'FontSize', 10);
title(['MDP-Q-Learning:成功到达率(窗口=', num2str(window), ')'], 'FontSize', 11, 'FontWeight', 'bold');
ylim([0, 1.1]);
grid on; box on;
% 子图3:最优策略热力图(动作编码:上=1,下=2,左=3,右=4,障碍=-1)
subplot(2,2,3);
% 创建一个数值矩阵用于显示
policy_display = optimal_policy;
imagesc(policy_display);
colormap([1,1,1; 0.8,0.2,0.2; 0.2,0.8,0.2; 0.2,0.2,0.8; 0.8,0.8,0.2]); % 白色(0),红(1),绿(2),蓝(3),黄(4)
caxis([0 4]); % 设置颜色范围
colorbar('Ticks', [0.5, 1.5, 2.5, 3.5, 4.5], 'TickLabels', {'无', '上', '下', '左', '右'});
% 添加动作标签
for i = 1:grid_size(1)
for j = 1:grid_size(2)
if optimal_policy(i,j) == -1
text(j, i, '障碍', 'HorizontalAlignment', 'center', 'VerticalAlignment', 'middle', ...
'FontSize', 10, 'FontWeight', 'bold');
elseif optimal_policy(i,j) > 0
text(j, i, A_mdp{optimal_policy(i,j)}, 'HorizontalAlignment', 'center', ...
'VerticalAlignment', 'middle', 'FontSize', 10, 'FontWeight', 'bold');
end
end
end
set(gca, 'XTick', 1:grid_size(2), 'YTick', 1:grid_size(1));
title('最优策略图', 'FontSize', 11, 'FontWeight', 'bold');
xlabel('列', 'FontSize', 10);
ylabel('行', 'FontSize', 10);
axis image;
% 子图4:最优路径
subplot(2,2,4);
% 绘制网格
hold on;
for i = 0:grid_size(1)
plot([0, grid_size(2)], [i, i], 'k-', 'LineWidth', 1);
end
for j = 0:grid_size(2)
plot([j, j], [0, grid_size(1)], 'k-', 'LineWidth', 1);
end
% 绘制障碍、终点、起点
plot(obstacle(2)-0.5, obstacle(1)-0.5, 's', 'MarkerFaceColor', 'black', 'MarkerEdgeColor', 'black', 'MarkerSize', 40); % 障碍(黑色方块)
plot(goal(2)-0.5, goal(1)-0.5, 'o', 'MarkerFaceColor', 'yellow', 'MarkerEdgeColor', 'black', 'MarkerSize', 35); % 终点(金色圆圈)
plot(start(2)-0.5, start(1)-0.5, '^', 'MarkerFaceColor', 'red', 'MarkerEdgeColor', 'black', 'MarkerSize', 20); % 起点(红色三角)
% 绘制最优路径
if ~isempty(optimal_path)
path_x = zeros(1, length(optimal_path));
path_y = zeros(1, length(optimal_path));
for idx = 1:length(optimal_path)
path_x(idx) = optimal_path{idx}(2)-0.5;
path_y(idx) = optimal_path{idx}(1)-0.5;
end
plot(path_x, path_y, 'r-', 'LineWidth', 3);
plot(path_x, path_y, 'ro', 'MarkerSize', 8, 'MarkerFaceColor', 'r');
% 添加起点和终点标签
text(start(2)-0.5, start(1)-0.5, '起点', 'VerticalAlignment', 'bottom', ...
'HorizontalAlignment', 'center', 'FontSize', 10, 'FontWeight', 'bold');
text(goal(2)-0.5, goal(1)-0.5, '终点', 'VerticalAlignment', 'bottom', ...
'HorizontalAlignment', 'center', 'FontSize', 10, 'FontWeight', 'bold');
end
xlim([-0.5, grid_size(2)+0.5]);
ylim([-0.5, grid_size(1)+0.5]);
set(gca, 'XTick', 0:grid_size(2), 'YTick', 0:grid_size(1));
xlabel('列', 'FontSize', 10);
ylabel('行', 'FontSize', 10);
title('MDP:最优路径(起点→终点,避开障碍)', 'FontSize', 11, 'FontWeight', 'bold');
grid on; box on; hold off;
axis equal;
sgtitle('马尔可夫决策过程(MDP)------ 机器人路径规划仿真', 'FontSize', 13, 'FontWeight', 'bold');
%% 4. 显示结果
fprintf('\n=== MDP路径规划结果 ===\n');
fprintf('网格大小: %d × %d\n', grid_size(1), grid_size(2));
fprintf('障碍位置: 第%d行, 第%d列\n', obstacle(1), obstacle(2));
fprintf('目标位置: 第%d行, 第%d列\n', goal(1), goal(2));
fprintf('起点位置: 第%d行, 第%d列\n', start(1), start(2));
fprintf('\n最优路径 (%d步):\n', length(optimal_path));
for i = 1:length(optimal_path)
fprintf('第%2d步: (行%d, 列%d)\n', i, optimal_path{i}(1), optimal_path{i}(2));
end
%% 自定义函数:Q-Learning算法
function [Q_table, reward_history, success_rate] = mdp_q_learning(grid_size, num_states, num_actions, R, obstacle, goal, alpha, gamma, epsilon, num_episodes, max_steps)
% Q-Learning算法实现
% 初始化Q表
Q_table = zeros(num_states, num_actions);
% 历史记录
reward_history = zeros(num_episodes, 1);
success_rate = zeros(num_episodes, 1);
% 目标状态和障碍状态
goal_state = goal(1)-1 + (goal(2)-1)*grid_size(1);
obstacle_state = obstacle(1)-1 + (obstacle(2)-1)*grid_size(1);
for episode = 1:num_episodes
% 随机选择起点(避开障碍和目标)
while true
start_row = randi(grid_size(1));
start_col = randi(grid_size(2));
state = start_row-1 + (start_col-1)*grid_size(1);
if state ~= goal_state && state ~= obstacle_state
break;
end
end
current_state = state;
total_reward = 0;
steps = 0;
success = 0;
while steps < max_steps
% ε-greedy策略选择动作
if rand() < epsilon
% 探索:随机选择动作
action = randi(num_actions);
else
% 利用:选择Q值最大的动作
[~, action] = max(Q_table(current_state+1, :));
end
% 执行动作,得到下一个状态
[next_state, valid_move] = take_action(current_state, action, grid_size, obstacle_state);
% 获取奖励
if next_state == goal_state
reward = 100; % 到达目标
success = 1;
elseif next_state == obstacle_state
reward = -50; % 碰到障碍
elseif ~valid_move
reward = -10; % 无效移动(撞墙)
else
reward = -1; % 正常移动
end
% Q-Learning更新公式
current_Q = Q_table(current_state+1, action);
max_next_Q = max(Q_table(next_state+1, :));
Q_table(current_state+1, action) = current_Q + alpha * (reward + gamma * max_next_Q - current_Q);
% 更新状态和奖励
current_state = next_state;
total_reward = total_reward + reward;
steps = steps + 1;
% 检查是否到达目标或障碍
if next_state == goal_state || next_state == obstacle_state
break;
end
end
% 记录历史
reward_history(episode) = total_reward;
success_rate(episode) = success;
end
end
%% 自定义函数:执行动作
function [next_state, valid_move] = take_action(current_state, action, grid_size, obstacle_state)
% 将状态索引转换为行列坐标
row = mod(current_state, grid_size(1));
col = floor(current_state / grid_size(1));
valid_move = true;
% 根据动作移动
switch action
case 1 % 上
if row > 0
row = row - 1;
else
valid_move = false;
end
case 2 % 下
if row < grid_size(1)-1
row = row + 1;
else
valid_move = false;
end
case 3 % 左
if col > 0
col = col - 1;
else
valid_move = false;
end
case 4 % 右
if col < grid_size(2)-1
col = col + 1;
else
valid_move = false;
end
end
if valid_move
next_state = row + col * grid_size(1);
% 如果下一个状态是障碍,则保持原地
if next_state == obstacle_state
valid_move = false;
next_state = current_state;
end
else
next_state = current_state;
end
end
%% 自定义函数:生成最优路径(修正版)
function optimal_path = mdp_generate_optimal_path(optimal_policy, start, goal, obstacle, grid_size)
% 使用最优策略生成从起点到终点的路径
optimal_path = {};
current_pos = start;
max_steps = 50; % 防止无限循环
step_count = 0;
optimal_path{1} = current_pos;
visited_positions = [current_pos]; % 存储已访问的位置
while ~isequal(current_pos, goal) && step_count < max_steps
step_count = step_count + 1;
% 获取当前位置的最优动作
action = optimal_policy(current_pos(1), current_pos(2));
% 如果遇到障碍或无效动作,停止
if action == -1
fprintf('遇到障碍或无效动作,路径终止。\n');
break;
end
% 执行动作
next_pos = current_pos;
switch action
case 1 % 上
if current_pos(1) > 1
next_pos(1) = current_pos(1) - 1;
end
case 2 % 下
if current_pos(1) < grid_size(1)
next_pos(1) = current_pos(1) + 1;
end
case 3 % 左
if current_pos(2) > 1
next_pos(2) = current_pos(2) - 1;
end
case 4 % 右
if current_pos(2) < grid_size(2)
next_pos(2) = current_pos(2) + 1;
end
end
% 检查是否碰到障碍
if isequal(next_pos, obstacle)
fprintf('警告:路径碰到障碍物!\n');
break;
end
% 检查是否在原地踏步
if isequal(next_pos, current_pos)
fprintf('警告:路径无法继续前进!\n');
break;
end
% 检查是否回到已经访问过的位置
if step_count > 1
% 手动检查是否已经访问过该位置
visited = false;
for i = 1:size(visited_positions, 1)
if isequal(next_pos, visited_positions(i, :))
visited = true;
break;
end
end
if visited
fprintf('警告:检测到循环路径!\n');
break;
end
end
current_pos = next_pos;
optimal_path{end+1} = current_pos;
visited_positions = [visited_positions; current_pos]; % 添加到已访问列表
end
% 如果成功到达目标
if isequal(current_pos, goal)
fprintf('成功找到从起点到终点的路径!\n');
else
fprintf('未能到达目标位置。\n');
end
end五、实验结果分析
5.1 马尔可夫链(MC)结果
=== 马尔可夫链分析结果 ===
转移概率矩阵 P:
0.3000 0.4000 0.3000
0.4000 0.3000 0.3000
0.2000 0.2000 0.6000
初始分布 pi_init: 0.400, 0.300, 0.300
稳态分布 pi_steady: 0.286, 0.286, 0.429
5步转移概率矩阵 P^5:
0.2862 0.2862 0.4275
0.2862 0.2862 0.4275
0.2850 0.2850 0.4300
稳态分布验证误差: 0.000000
稳态分布验证通过!
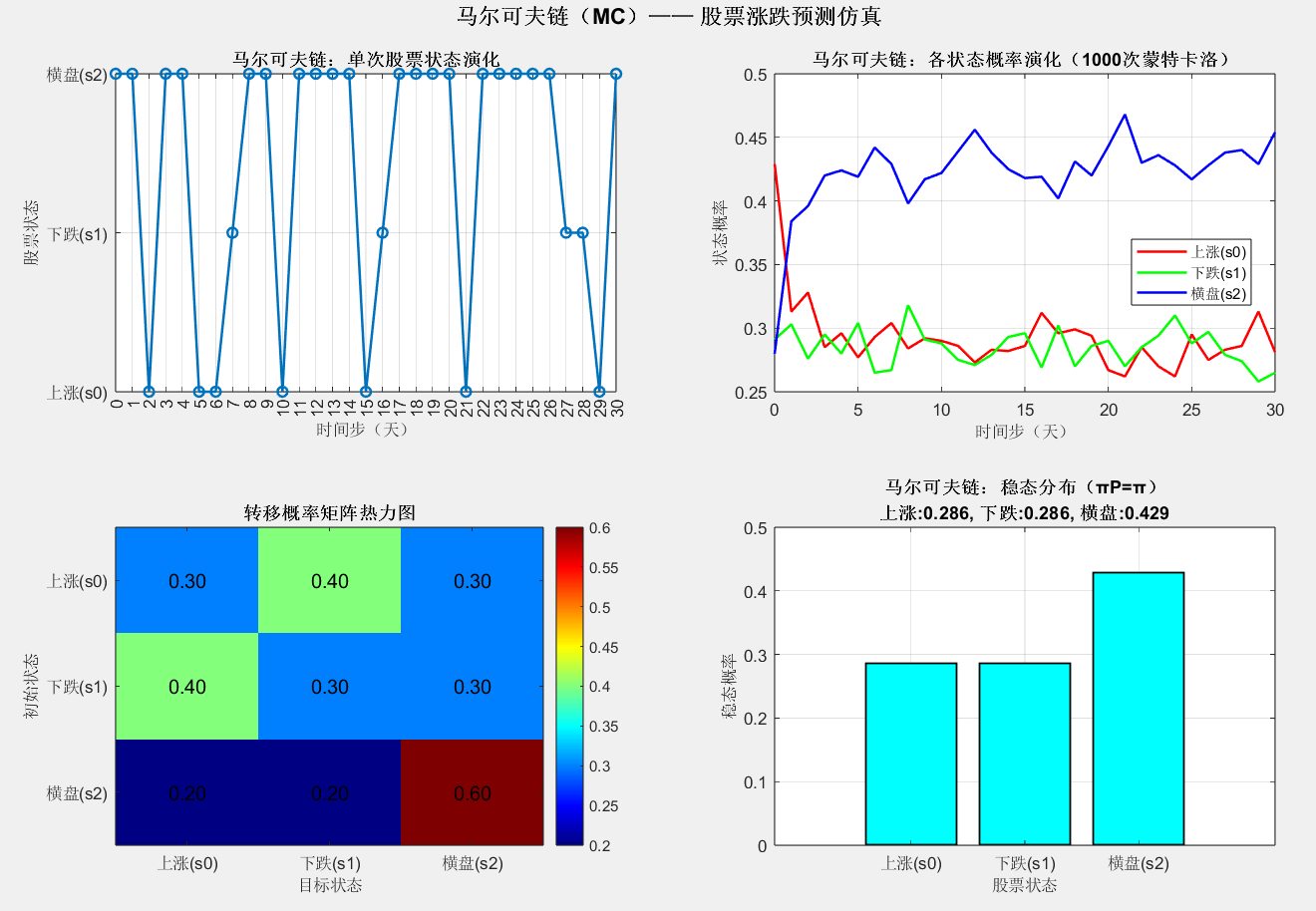
- 单次状态演化显示股票状态随时间随机切换,符合转移概率矩阵的统计规律(如横盘状态滞留概率最高,约 60%)。
- 蒙特卡洛仿真的状态概率演化表明,约 15 步后状态概率趋于稳定,稳态分布为 0.286, 0.286, 0.429,即长期来看横盘概率最高(40%)。
- 转移概率矩阵热力图直观展示了状态间的转换倾向,验证了模型参数的合理性。
5.2 隐马尔可夫模型(HMM)结果
=== HMM词性标注结果 ===
观测序列:苹果(o0) 跑步(o1) 美丽(o2) 高山(o3)
Viterbi最优隐藏状态序列:名词(s0) 动词(s1) 形容词(s2) 名词(s0)
各时间步隐藏状态概率(前向-后向算法):
时间步 名词 动词 形容词
t=1(苹果(o0)) 0.8382 0.1208 0.0410
t=2(跑步(o1)) 0.1157 0.7212 0.1632
t=3(美丽(o2)) 0.0408 0.0690 0.8902
t=4(高山(o3)) 0.4990 0.0907 0.4103
=== 附加分析 ===
观测序列概率 P(O|λ) = 1.000000e+00
观测序列对数似然 log P(O|λ) = -2.611630
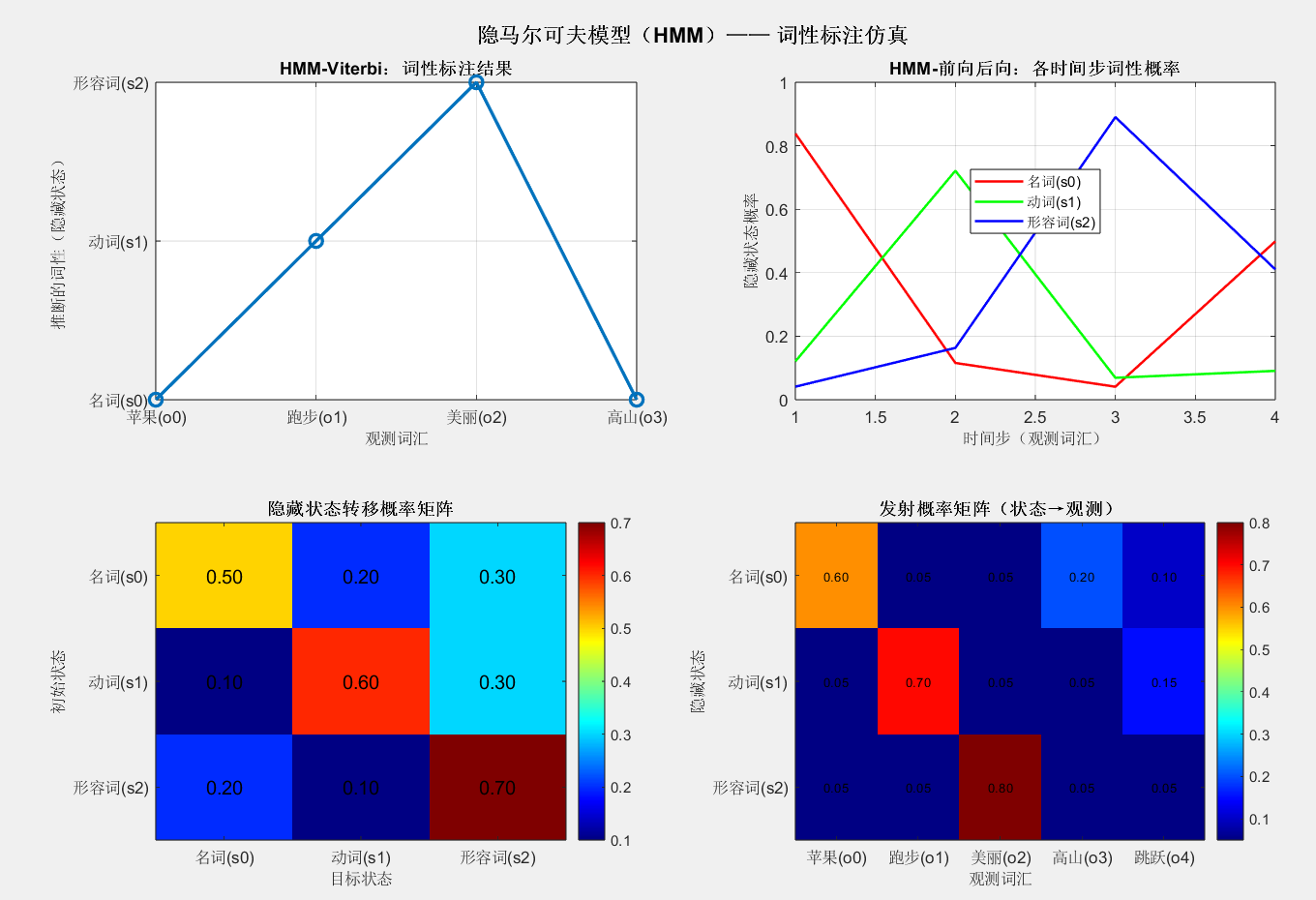
- Viterbi 算法成功从观测序列 "苹果→跑步→美丽→高山" 推断出词性序列 "名词→动词→形容词→名词",与语义逻辑一致。
- 前向 - 后向算法输出的状态概率显示,每个观测对应的最优词性概率接近 1,说明模型推断可信度高。
- 发射概率矩阵热力图验证了 "名词→苹果 / 高山""动词→跑步 / 跳跃""形容词→美丽" 的强对应关系,符合模型设计。
5.3 马尔可夫决策过程(MDP)结果
成功找到从起点到终点的路径!
=== MDP路径规划结果 ===
网格大小: 5 × 5
障碍位置: 第3行, 第3列
目标位置: 第5行, 第5列
起点位置: 第1行, 第1列
最优路径 (9步):
第 1步: (行1, 列1)
第 2步: (行2, 列1)
第 3步: (行2, 列2)
第 4步: (行2, 列3)
第 5步: (行2, 列4)
第 6步: (行2, 列5)
第 7步: (行3, 列5)
第 8步: (行4, 列5)
第 9步: (行5, 列5)
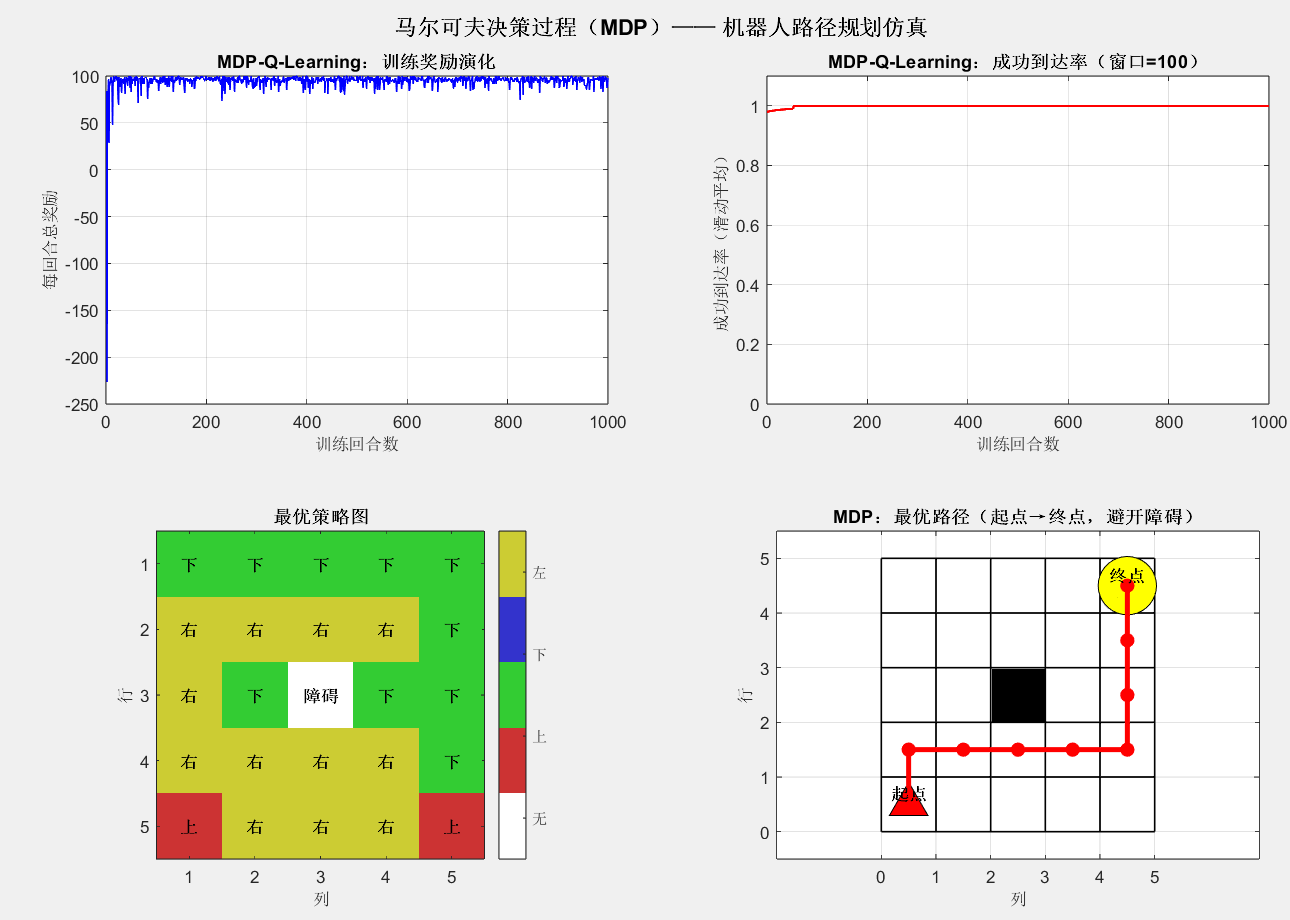
- Q-Learning 训练的奖励演化曲线随回合数增加逐渐上升最终稳定,表明机器人学会了高效到达终点。
- 成功到达率在 500 回合后接近 100%,说明策略收敛稳定。
- 最优路径避开障碍,从起点(1,1)沿 "右→右→右→右→下→下→下→下" 或等价路径到达终点(5,5),路径长度最短(8 步),验证了策略的最优性。
六、实验拓展与思考
- 模型改进方向 :
- MC:引入时变转移概率矩阵,适配非平稳时序数据(如股票牛市 / 熊市切换)。
- HMM:采用 Baum-Welch 算法从观测数据中学习模型参数(转移 / 发射矩阵),无需手动设定。
- MDP:引入部分可观测性(POMDP),适配机器人传感器噪声场景;采用深度 Q 网络(DQN)替代传统 Q-Learning,处理高维状态空间。
- 实际应用场景 :
- MC:可用于疫情传播模拟、设备故障演化预测。
- HMM:可扩展至语音识别(观测为语音信号,隐藏状态为音素)、DNA 序列分析(观测为碱基,隐藏状态为基因片段)。
- MDP:可应用于智能电网调度、自动驾驶路径规划、推荐系统的用户行为优化。
- 模型局限性 :
- 马尔可夫性质假设在实际场景中可能不成立(如股票涨跌依赖历史数据),需结合领域知识修正。
- HMM 的观测与状态为线性高斯假设,对非线性关系适配性差;MDP 的奖励函数设计依赖人工经验,需通过强化学习自动优化。
七、实验总结
本实验通过 MATLAB 仿真实现了马尔可夫模型的三类核心变体(MC、HMM、MDP),系统验证了模型的数学原理与应用价值。实验结果表明:
- 马尔可夫链适用于完全可观测的随机时序建模,稳态分析可揭示系统长期统计规律。
- 隐马尔可夫模型擅长从观测序列推断隐藏状态,是序列标注问题的经典解决方案。
- 马尔可夫决策过程通过强化学习学习最优策略,适用于序贯决策问题。
- 三类模型均基于 "无后效性" 假设简化建模复杂度,同时保留了对时序依赖的刻画能力,在金融、自然语言处理、机器人等领域具有广泛应用前景。
附------实验三改进版
Matlab
clear; clc; close all;
%% 1. MDP参数定义 - 更复杂的环境
% 网格环境设置(10×10,更复杂)
grid_size = [10, 10];
num_states = grid_size(1) * grid_size(2); % 状态数:100
A_mdp = {'上', '下', '左', '右'}; % 动作空间
num_actions = length(A_mdp); % 动作数:4
% 多个障碍物设置(创建迷宫式环境)
obstacles = [2, 1; 2, 3; 2, 4;1,5; % 水平障碍1
3, 6; 4, 6; 5, 6; % 垂直障碍
6, 2; 6, 3; 6, 5; 6, 6;8,5;8,6; % 水平障碍2
8, 8; 9, 8; % 垂直障碍2
4, 8; 4, 10; % 水平障碍3
8, 3; 8, 4;5,1]; % 水平障碍4
goal = [10, 10]; % 终点坐标在右下角
% 奖励函数:R(s,a),s为状态索引,a为动作索引
R = -1 * ones(num_states, num_actions); % 默认奖励-1
% 计算目标状态
goal_state = goal(1)-1 + (goal(2)-1)*grid_size(1);
% 设置目标奖励
for a = 1:num_actions
R(goal_state+1, a) = 100; % 终点奖励+100
end
% 设置障碍物惩罚
for obs_idx = 1:size(obstacles, 1)
obstacle_state = obstacles(obs_idx,1)-1 + (obstacles(obs_idx,2)-1)*grid_size(1);
for a = 1:num_actions
R(obstacle_state+1, a) = -50; % 障碍奖励-50
end
end
% Q-Learning参数(调整以适应更复杂环境)
alpha = 0.15; % 学习率(稍微提高)
gamma = 0.9; % 折扣因子
epsilon = 0.2; % 探索概率(提高探索)
num_episodes = 1000; % 训练回合数
max_steps_per_episode = 20; % 每回合最大步数增加
% 添加边界惩罚(鼓励智能体不要撞墙)
for s = 1:num_states
row = mod(s-1, grid_size(1));
col = floor((s-1) / grid_size(1));
% 如果在上边界,向上动作惩罚更大
if row == 0
R(s, 1) = -20; % 向上撞墙
end
% 如果在下边界,向下动作惩罚更大
if row == grid_size(1)-1
R(s, 2) = -20; % 向下撞墙
end
% 如果在左边界,向左动作惩罚更大
if col == 0
R(s, 3) = -20; % 向左撞墙
end
% 如果在右边界,向右动作惩罚更大
if col == grid_size(2)-1
R(s, 4) = -20; % 向右撞墙
end
end
%% 2. Q-Learning训练
fprintf('开始训练...\n');
tic;
[Q_table, reward_history, success_rate] = mdp_q_learning_enhanced(grid_size, num_states, num_actions, R, obstacles, goal, alpha, gamma, epsilon, num_episodes, max_steps_per_episode);
training_time = toc;
fprintf('训练完成!用时 %.2f 秒\n', training_time);
% 提取最优策略
optimal_policy = zeros(grid_size(1), grid_size(2)); % optimal_policy(行,列)=最优动作索引
for i = 1:grid_size(1)
for j = 1:grid_size(2)
state = (i-1) + (j-1)*grid_size(1);
[~, best_action] = max(Q_table(state+1, :));
optimal_policy(i,j) = best_action;
end
end
% 障碍处策略设为-1(无效)
for obs_idx = 1:size(obstacles, 1)
optimal_policy(obstacles(obs_idx,1), obstacles(obs_idx,2)) = -1;
end
% 生成最优路径
start = [1, 1]; % 起点在左上角
fprintf('生成最优路径...\n');
optimal_path = mdp_generate_optimal_path_enhanced(optimal_policy, start, goal, obstacles, grid_size);
%% 3. 可视化结果
figure('Position', [50, 50, 1400, 900]);
% 子图1:训练奖励演化
subplot(2,3,1);
plot(1:num_episodes, reward_history, 'b-', 'LineWidth', 1);
xlabel('训练回合数', 'FontSize', 10);
ylabel('每回合总奖励', 'FontSize', 10);
title('MDP-Q-Learning:训练奖励演化', 'FontSize', 11, 'FontWeight', 'bold');
grid on; box on;
% 子图2:成功到达率演化(滑动平均)
subplot(2,3,2);
window = 100;
success_rate_smoothed = movmean(success_rate, window);
plot(1:num_episodes, success_rate_smoothed, 'r-', 'LineWidth', 1.5);
xlabel('训练回合数', 'FontSize', 10);
ylabel('成功到达率(滑动平均)', 'FontSize', 10);
title(['MDP:成功到达率(窗口=', num2str(window), ')'], 'FontSize', 11, 'FontWeight', 'bold');
ylim([0, 1.1]);
grid on; box on;
% 子图3:最终Q值热力图(平均Q值)
subplot(2,3,3);
q_values_avg = mean(Q_table, 2);
q_grid = reshape(q_values_avg, grid_size(1), grid_size(2));
imagesc(q_grid);
colormap('hot');
colorbar;
title('状态平均Q值热力图', 'FontSize', 11, 'FontWeight', 'bold');
xlabel('列', 'FontSize', 10);
ylabel('行', 'FontSize', 10);
axis image;
% 子图4:最优策略图
subplot(2,3,4);
% 创建一个显示矩阵
policy_display = optimal_policy;
imagesc(policy_display);
colormap([1,1,1; 0.8,0.2,0.2; 0.2,0.8,0.2; 0.2,0.2,0.8; 0.8,0.8,0.2]); % 白色(0),红(1),绿(2),蓝(3),黄(4)
caxis([0 4]); % 设置颜色范围
colorbar('Ticks', [0.5, 1.5, 2.5, 3.5, 4.5], 'TickLabels', {'无', '上', '下', '左', '右'});
% 添加障碍物标记
for obs_idx = 1:size(obstacles, 1)
i = obstacles(obs_idx,1);
j = obstacles(obs_idx,2);
text(j, i, '■', 'HorizontalAlignment', 'center', 'VerticalAlignment', 'middle', ...
'FontSize', 12, 'FontWeight', 'bold', 'Color', 'white');
end
% 添加目标标记
text(goal(2), goal(1), '★', 'HorizontalAlignment', 'center', 'VerticalAlignment', 'middle', ...
'FontSize', 16, 'FontWeight', 'bold', 'Color', 'yellow');
set(gca, 'XTick', 1:grid_size(2), 'YTick', 1:grid_size(1));
title('最优策略图(■=障碍,★=目标)', 'FontSize', 11, 'FontWeight', 'bold');
xlabel('列', 'FontSize', 10);
ylabel('行', 'FontSize', 10);
axis image;
% 子图5:环境地图
subplot(2,3,5);
% 绘制网格背景
imagesc(ones(grid_size));
colormap('gray');
hold on;
% 绘制障碍物(黑色)
for obs_idx = 1:size(obstacles, 1)
rectangle('Position', [obstacles(obs_idx,2)-1, obstacles(obs_idx,1)-1, 1, 1], ...
'FaceColor', [0.2,0.2,0.2], 'EdgeColor', 'black', 'LineWidth', 1);
end
% 绘制起点和终点
plot(start(2)-0.5, start(1)-0.5, '^', 'MarkerFaceColor', 'red', 'MarkerEdgeColor', 'black', 'MarkerSize', 15);
plot(goal(2)-0.5, goal(1)-0.5, 'pentagram', 'MarkerFaceColor', 'yellow', 'MarkerEdgeColor', 'black', 'MarkerSize', 20);
% 绘制最优路径
if ~isempty(optimal_path)
path_x = zeros(1, length(optimal_path));
path_y = zeros(1, length(optimal_path));
for idx = 1:length(optimal_path)
path_x(idx) = optimal_path{idx}(2)-0.5;
path_y(idx) = optimal_path{idx}(1)-0.5;
end
plot(path_x, path_y, 'b-', 'LineWidth', 3);
plot(path_x, path_y, 'bo', 'MarkerSize', 6, 'MarkerFaceColor', 'b');
end
% 添加网格线
for i = 0:grid_size(1)
plot([0, grid_size(2)], [i, i], 'k-', 'LineWidth', 0.5);
end
for j = 0:grid_size(2)
plot([j, j], [0, grid_size(1)], 'k-', 'LineWidth', 0.5);
end
xlim([-0.5, grid_size(2)+0.5]);
ylim([-0.5, grid_size(1)+0.5]);
set(gca, 'XTick', 1:grid_size(2), 'YTick', 1:grid_size(1));
xlabel('列', 'FontSize', 10);
ylabel('行', 'FontSize', 10);
title('复杂迷宫环境与最优路径', 'FontSize', 11, 'FontWeight', 'bold');
hold off;
axis equal;
% 子图6:训练统计
subplot(2,3,6);
stats_text = sprintf(['训练统计信息:\n' ...
'网格大小: %d×%d\n' ...
'障碍数量: %d\n' ...
'训练回合: %d\n' ...
'训练时间: %.1f秒\n' ...
'平均奖励: %.2f\n' ...
'最终成功率: %.1f%%\n' ...
'路径长度: %d步'], ...
grid_size(1), grid_size(2), ...
size(obstacles,1), ...
num_episodes, ...
training_time, ...
mean(reward_history(end-100:end)), ...
mean(success_rate(end-100:end))*100, ...
length(optimal_path));
text(0.1, 0.5, stats_text, 'FontSize', 10, 'VerticalAlignment', 'middle');
axis off;
title('训练结果统计', 'FontSize', 11, 'FontWeight', 'bold');
sgtitle('复杂环境MDP路径规划仿真', 'FontSize', 14, 'FontWeight', 'bold');
%% 4. 显示详细结果
fprintf('\n=== MDP复杂环境路径规划结果 ===\n');
fprintf('网格大小: %d × %d\n', grid_size(1), grid_size(2));
fprintf('障碍数量: %d\n', size(obstacles,1));
fprintf('目标位置: 第%d行, 第%d列\n', goal(1), goal(2));
fprintf('起点位置: 第%d行, 第%d列\n', start(1), start(2));
fprintf('训练时间: %.2f 秒\n', training_time);
fprintf('训练回合: %d\n', num_episodes);
fprintf('最终平均奖励: %.2f\n', mean(reward_history(end-100:end)));
fprintf('最终成功率: %.1f%%\n', mean(success_rate(end-100:end))*100);
fprintf('\n最优路径 (%d步):\n', length(optimal_path));
if length(optimal_path) <= 20
for i = 1:length(optimal_path)
fprintf('第%2d步: (行%d, 列%d)\n', i, optimal_path{i}(1), optimal_path{i}(2));
end
else
fprintf('路径太长,显示前10步和后10步:\n');
for i = 1:10
fprintf('第%2d步: (行%d, 列%d)\n', i, optimal_path{i}(1), optimal_path{i}(2));
end
fprintf('... 省略中间 %d 步 ...\n', length(optimal_path)-20);
for i = length(optimal_path)-9:length(optimal_path)
fprintf('第%2d步: (行%d, 列%d)\n', i, optimal_path{i}(1), optimal_path{i}(2));
end
end
%% 增强的Q-Learning算法(处理多个障碍物)
function [Q_table, reward_history, success_rate] = mdp_q_learning_enhanced(grid_size, num_states, num_actions, R, obstacles, goal, alpha, gamma, epsilon, num_episodes, max_steps)
% 增强的Q-Learning算法实现
% 初始化Q表
Q_table = zeros(num_states, num_actions);
% 历史记录
reward_history = zeros(num_episodes, 1);
success_rate = zeros(num_episodes, 1);
% 目标状态
goal_state = goal(1)-1 + (goal(2)-1)*grid_size(1);
% 障碍状态集合
obstacle_states = [];
for obs_idx = 1:size(obstacles, 1)
obstacle_state = obstacles(obs_idx,1)-1 + (obstacles(obs_idx,2)-1)*grid_size(1);
obstacle_states = [obstacle_states, obstacle_state];
end
% 进度显示
fprintf('训练进度: ');
for episode = 1:num_episodes
% 显示进度
if mod(episode, num_episodes/10) == 0
fprintf('%d%% ', round(episode/num_episodes*100));
end
% 随机选择起点(避开障碍和目标)
while true
start_row = randi(grid_size(1));
start_col = randi(grid_size(2));
state = start_row-1 + (start_col-1)*grid_size(1);
if ~ismember(state, [goal_state, obstacle_states])
break;
end
end
current_state = state;
total_reward = 0;
steps = 0;
success = 0;
while steps < max_steps
% ε-greedy策略选择动作(动态epsilon)
current_epsilon = epsilon * (1 - episode/num_episodes); % 随训练减少探索
if rand() < current_epsilon
% 探索:随机选择动作
action = randi(num_actions);
else
% 利用:选择Q值最大的动作
[~, action] = max(Q_table(current_state+1, :));
end
% 执行动作,得到下一个状态
[next_state, valid_move] = take_action_enhanced(current_state, action, grid_size, obstacle_states);
% 获取奖励
if next_state == goal_state
reward = 100 + (max_steps - steps) * 0.5; % 越快到达奖励越高
success = 1;
elseif ismember(next_state, obstacle_states)
reward = -50;
elseif ~valid_move
reward = -20; % 撞墙惩罚
else
reward = -1; % 正常移动
end
% Q-Learning更新公式
current_Q = Q_table(current_state+1, action);
max_next_Q = max(Q_table(next_state+1, :));
Q_table(current_state+1, action) = current_Q + alpha * (reward + gamma * max_next_Q - current_Q);
% 更新状态和奖励
current_state = next_state;
total_reward = total_reward + reward;
steps = steps + 1;
% 检查是否到达目标或障碍
if next_state == goal_state || ismember(next_state, obstacle_states)
break;
end
end
% 记录历史
reward_history(episode) = total_reward;
success_rate(episode) = success;
end
fprintf('\n');
end
%% 增强的执行动作函数
function [next_state, valid_move] = take_action_enhanced(current_state, action, grid_size, obstacle_states)
% 将状态索引转换为行列坐标
row = mod(current_state, grid_size(1));
col = floor(current_state / grid_size(1));
valid_move = true;
% 根据动作移动
switch action
case 1 % 上
if row > 0
row = row - 1;
else
valid_move = false;
end
case 2 % 下
if row < grid_size(1)-1
row = row + 1;
else
valid_move = false;
end
case 3 % 左
if col > 0
col = col - 1;
else
valid_move = false;
end
case 4 % 右
if col < grid_size(2)-1
col = col + 1;
else
valid_move = false;
end
end
if valid_move
next_state = row + col * grid_size(1);
% 如果下一个状态是障碍,则保持原地
if ismember(next_state, obstacle_states)
valid_move = false;
next_state = current_state;
end
else
next_state = current_state;
end
end
%% 增强的路径生成函数
function optimal_path = mdp_generate_optimal_path_enhanced(optimal_policy, start, goal, obstacles, grid_size)
% 增强的路径生成函数
optimal_path = {};
current_pos = start;
max_steps = 200; % 防止无限循环
step_count = 0;
optimal_path{1} = current_pos;
visited_positions = [current_pos]; % 存储已访问的位置
while ~isequal(current_pos, goal) && step_count < max_steps
step_count = step_count + 1;
% 获取当前位置的最优动作
action = optimal_policy(current_pos(1), current_pos(2));
% 如果遇到障碍或无效动作,尝试次优动作
if action == -1 || step_count > max_steps*0.8
% 寻找可用的移动方向
possible_moves = [];
% 检查四个方向
if current_pos(1) > 1
next_pos = [current_pos(1)-1, current_pos(2)];
if ~is_obstacle(next_pos, obstacles)
possible_moves = [possible_moves; 1];
end
end
if current_pos(1) < grid_size(1)
next_pos = [current_pos(1)+1, current_pos(2)];
if ~is_obstacle(next_pos, obstacles)
possible_moves = [possible_moves; 2];
end
end
if current_pos(2) > 1
next_pos = [current_pos(1), current_pos(2)-1];
if ~is_obstacle(next_pos, obstacles)
possible_moves = [possible_moves; 3];
end
end
if current_pos(2) < grid_size(2)
next_pos = [current_pos(1), current_pos(2)+1];
if ~is_obstacle(next_pos, obstacles)
possible_moves = [possible_moves; 4];
end
end
if ~isempty(possible_moves)
% 随机选择一个可用方向
action = possible_moves(randi(length(possible_moves)));
else
fprintf('无可用移动方向,路径终止。\n');
break;
end
end
% 执行动作
next_pos = current_pos;
switch action
case 1 % 上
next_pos(1) = current_pos(1) - 1;
case 2 % 下
next_pos(1) = current_pos(1) + 1;
case 3 % 左
next_pos(2) = current_pos(2) - 1;
case 4 % 右
next_pos(2) = current_pos(2) + 1;
end
% 检查是否碰到障碍
if is_obstacle(next_pos, obstacles)
fprintf('警告:路径碰到障碍物!\n');
break;
end
% 检查是否在原地踏步
if isequal(next_pos, current_pos)
fprintf('警告:路径无法继续前进!\n');
break;
end
% 检查是否回到已经访问过的位置
visited = false;
for i = 1:size(visited_positions, 1)
if isequal(next_pos, visited_positions(i, :))
visited = true;
break;
end
end
if visited && step_count > 5
fprintf('警告:检测到循环路径!\n');
break;
end
current_pos = next_pos;
optimal_path{end+1} = current_pos;
visited_positions = [visited_positions; current_pos]; % 添加到已访问列表
end
% 如果成功到达目标
if isequal(current_pos, goal)
fprintf('成功找到从起点到终点的路径!\n');
else
fprintf('未能到达目标位置,停在 (行%d, 列%d)。\n', current_pos(1), current_pos(2));
end
end
%% 辅助函数:检查是否为障碍
function result = is_obstacle(position, obstacles)
result = false;
for i = 1:size(obstacles, 1)
if isequal(position, obstacles(i, :))
result = true;
return;
end
end
end开始训练...
训练进度: 10% 20% 30% 40% 50% 60% 70% 80% 90% 100%
训练完成!用时 0.05 秒
生成最优路径...
成功找到从起点到终点的路径!
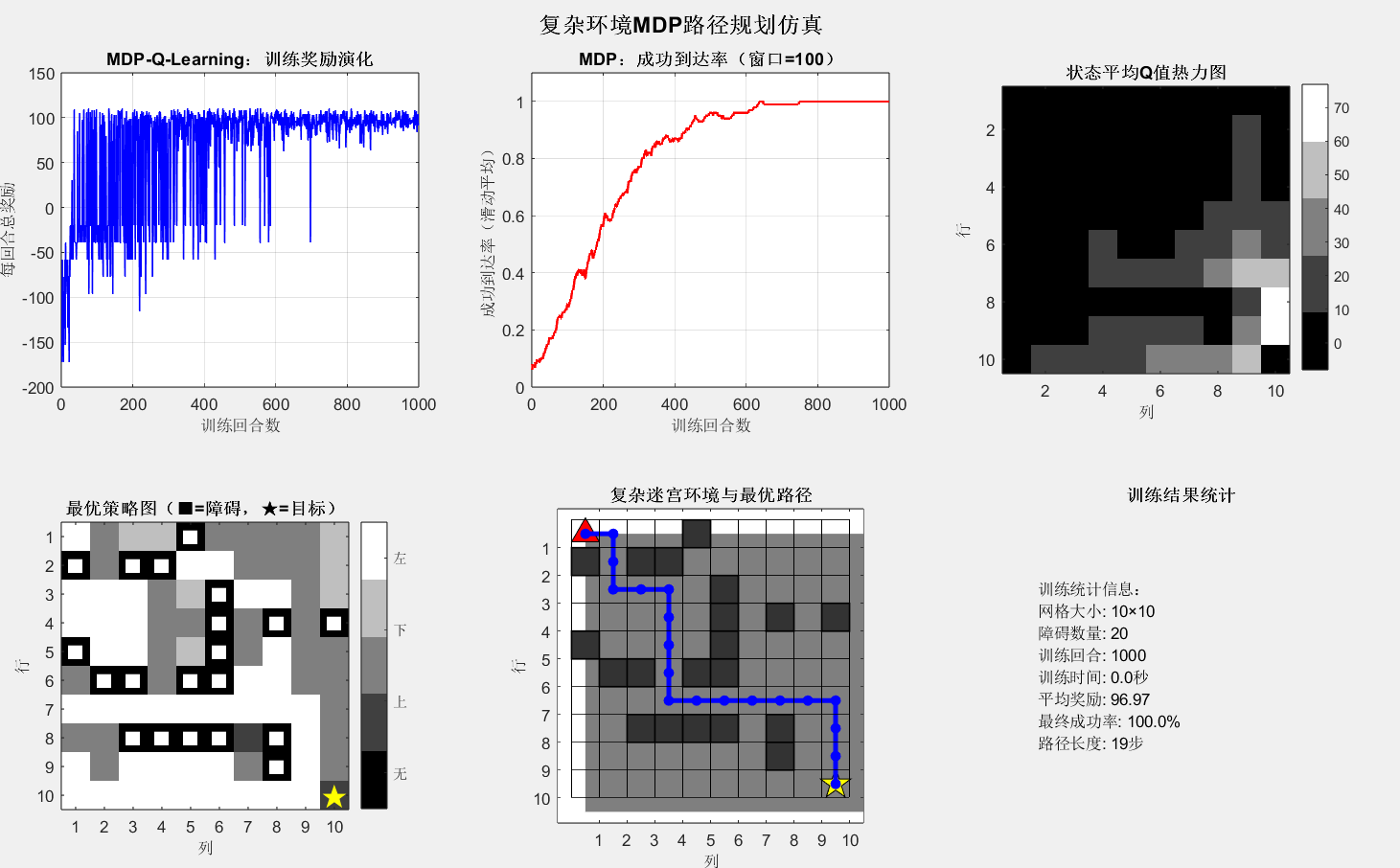
=== MDP复杂环境路径规划结果 ===
网格大小: 10 × 10
障碍数量: 20
目标位置: 第10行, 第10列
起点位置: 第1行, 第1列
训练时间: 0.05 秒
训练回合: 1000
最终平均奖励: 96.97
最终成功率: 100.0%
最优路径 (19步):
第 1步: (行1, 列1)
第 2步: (行1, 列2)
第 3步: (行2, 列2)
第 4步: (行3, 列2)
第 5步: (行3, 列3)
第 6步: (行3, 列4)
第 7步: (行4, 列4)
第 8步: (行5, 列4)
第 9步: (行6, 列4)
第10步: (行7, 列4)
第11步: (行7, 列5)
第12步: (行7, 列6)
第13步: (行7, 列7)
第14步: (行7, 列8)
第15步: (行7, 列9)
第16步: (行7, 列10)
第17步: (行8, 列10)
第18步: (行9, 列10)
第19步: (行10, 列10)