**前言:**之前使用基于scan context方法实现重定位;但是在高动态场景,仍需要手动重定位。
摘要
本文提出了一种新的三维位置识别全局描述子------稳定三角形描述子(Stable Triangle Descriptor,STD)。对于任意一个三角形,其形状可由边长或内角唯一确定,并且三角形的形状在刚体变换下保持完全不变。基于这一特性,本文首先设计了一种高效的三维点云局部关键点提取方法,并将这些关键点编码为三角形描述子。随后,通过匹配不同点云中三角形描述子的边长(及其他辅助信息)实现位置识别。由描述子匹配得到的点对应关系还可进一步用于几何一致性验证,从而显著提升位置识别的准确性。
本文的主要贡献总结如下:
- 提出了一种三角形描述子,其为一个六维向量,包含三条边的长度以及与每个三角形顶点相邻平面法向量之间的夹角。该描述子在保持高度判别性的同时,对旋转和平移具有完全不变性。
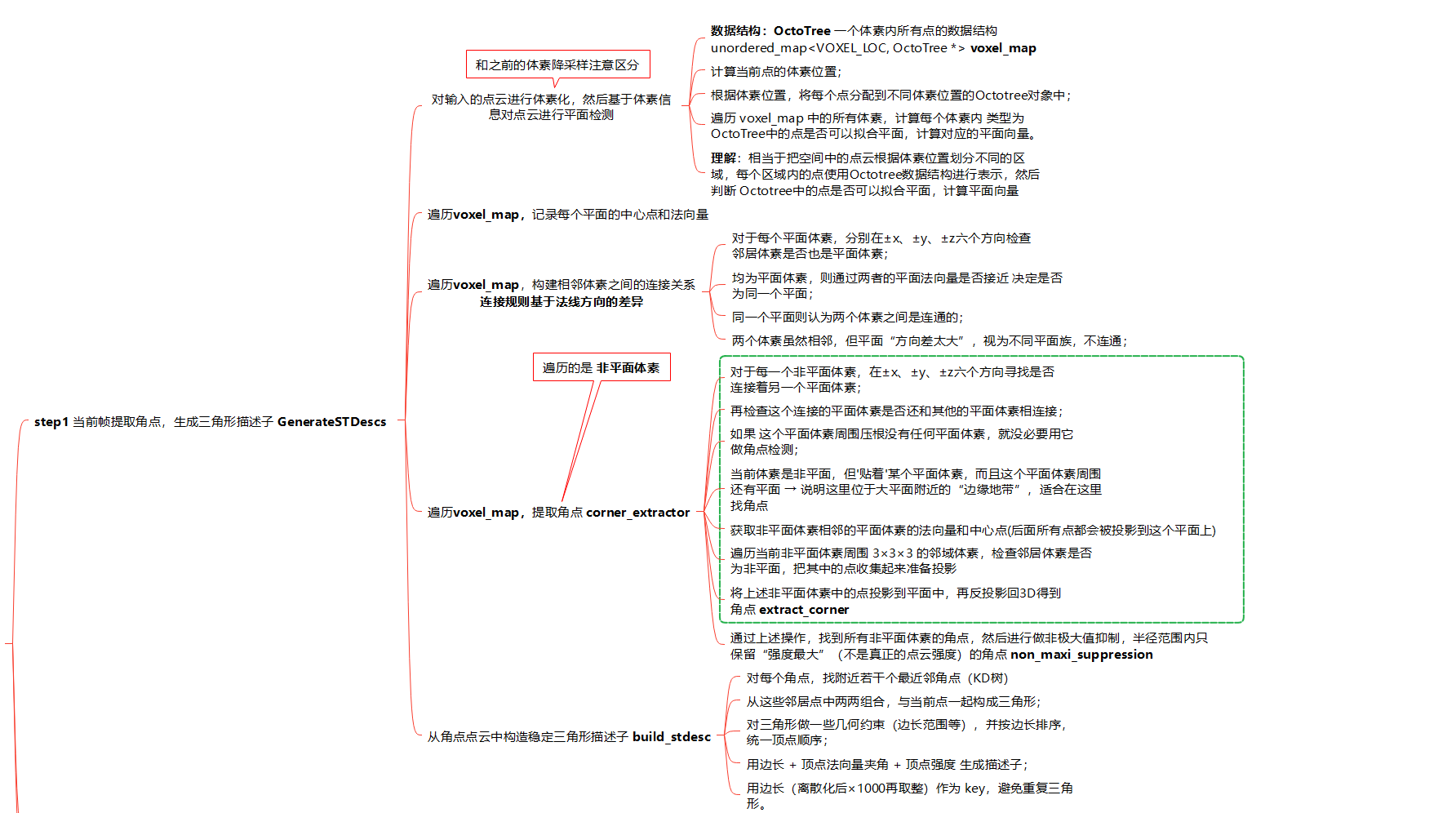
- 提出了一种基于关键帧的快速关键点提取方法。通过将点云投影至平面边界并提取结构关键点,以有效刻画场景的几何结构,并利用相邻关键点构建三角形描述子。
- 在多种场景和多类型 LiDAR 数据上进行了充分验证,包括城市环境、室内环境以及非结构化场景,同时涵盖传统旋转式 LiDAR 和固态 LiDAR。大量实验结果验证了所提方法的有效性和鲁棒性。
主要方法
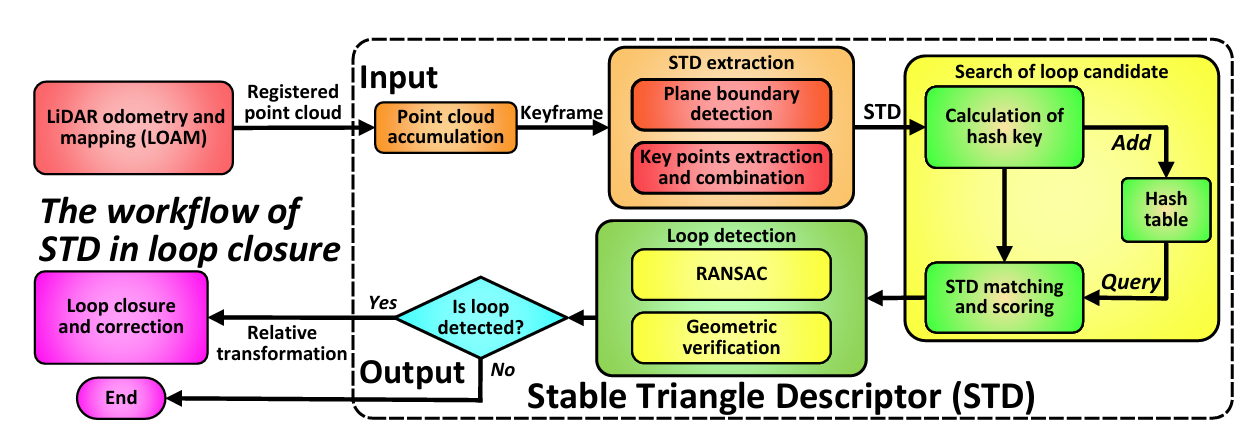
本文方法首先从关键帧中计算稳定三角形描述子,并利用哈希表构建描述子数据库,以实现高效的存储与匹配。在回环检测阶段,根据描述子匹配得分选取匹配度最高的前 10 帧作为回环候选帧。当候选帧通过几何一致性验证后,即被判定为有效回环,同时可估计当前帧与回环帧之间的相对位姿变换。
稳定三角形描述子(Stable Triangle Descriptor)
回环候选帧搜索(Search of Loop Candidates)

备注 1: 由于边界关键点是从三维点云中提取的平面上进行投影,而非从距离图像中提取,因此所获得的关键点对视角变化具有不变性。此外,所采用的六个描述子属性均对任意刚体变换保持不变性,从而使得整体方法同时具备旋转和平移不变性。
备注 2: 得益于三角形边长的有序排列以及三角形本身的几何稳定性,若且仅若两个三角形的有序边长完全相等,则可判定这两个三角形相同,而无需枚举不同边之间的对应关系。
回环检测(Loop Detection)
对于每一个回环候选关键帧,我们首先进行几何一致性验证,以剔除因描述子匹配错误导致的虚假回环。
