K-means算法的优点:简单,快速,适合常规的数据集
缺点:k值难以确定,很难发现任意形状的簇
针对K-means算法的缺点,我们来介绍新的DBSCAN算法
DBSCAN 概念
DBSCAN(Density-Based Spatial Clustering of Applications with Noise)
基于密度的带噪声的空间聚类应用算法,它是将簇定义为密度相连的点的最大集合,能够把具有足够高密度的区域划分为簇,并在噪声的空间数据集中发现任意形状的聚类。
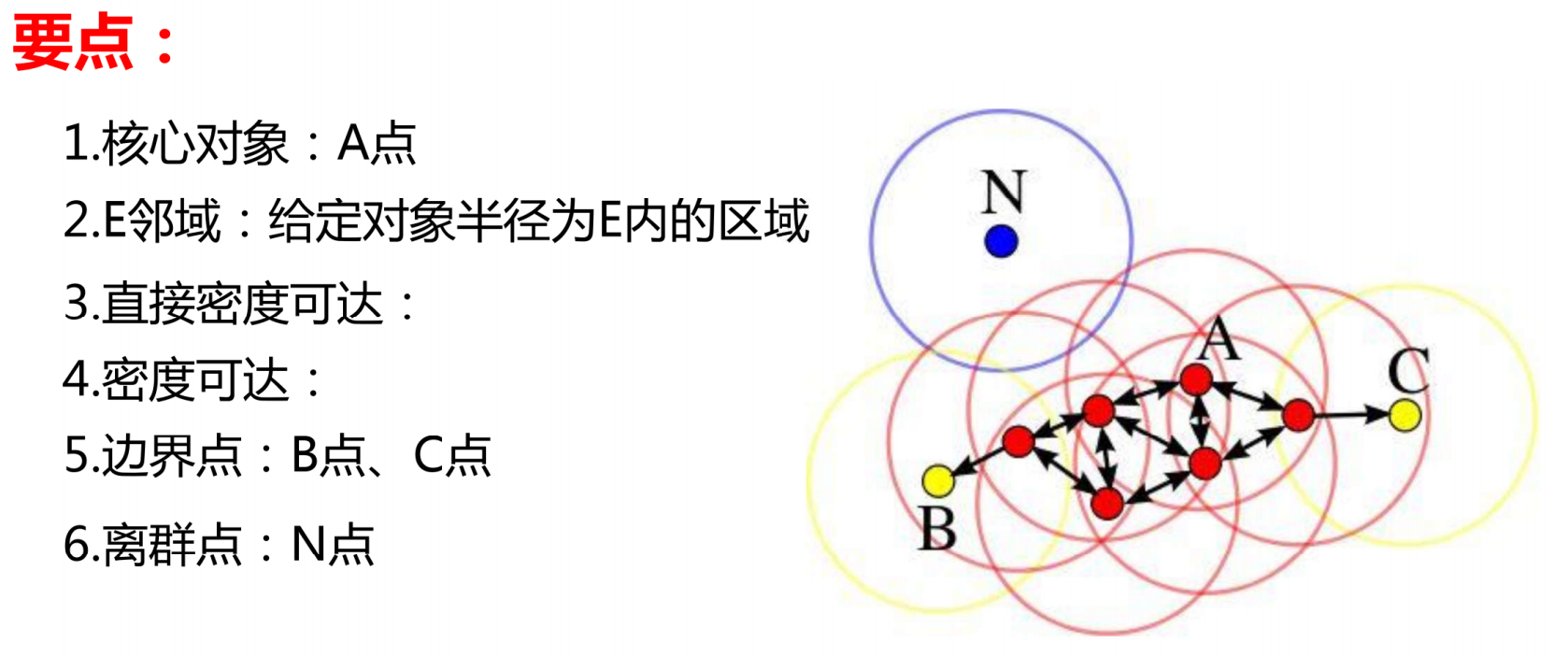
要理解这一算法,首先需要掌握以下六个关键概念:
-
核心对象(Core Object):假设存在一个数据点 A,以 A 为中心、指定半径 ε(E 邻域半径)画一个圆,若该圆形区域内包含的数据点数量达到或超过预设的密度阈值 MinPts,则点 A 被称为核心对象。核心对象是聚类形成的基础,代表了密度足够高的区域核心。
-
E 邻域(Epsilon Neighborhood):给定数据对象,以该对象为中心、半径为 ε 的圆形区域(在高维空间中为超球体)称为该对象的 E 邻域。E 邻域是衡量数据点密度的重要范围,其半径 ε 的取值直接影响聚类结果的精细程度。
-
直接密度可达(Directly Density-Reachable):若数据点 B 位于核心对象 A 的 E 邻域内,则称点 B 从点 A 直接密度可达。这种可达关系是单向的,仅当 A 为核心对象时,B 才能从 A 直接密度可达,反之则不成立。
-
密度可达(Density-Reachable):若存在一条数据点链 A₁、A₂、...、Aₙ,其中 A₁为核心对象,A₂从 A₁直接密度可达,A₃从 A₂直接密度可达,...,Aₙ从 Aₙ₋₁直接密度可达,则称点 Aₙ从点 A₁密度可达。密度可达关系具有传递性,是形成聚类簇的关键纽带。
-
边界点(Border Point):数据点 B、C 满足以下条件则为边界点:一是它们本身不是核心对象(即其 E 邻域内的数据点数量小于 MinPts);二是存在核心对象,使得这些点从该核心对象密度可达。边界点属于某一聚类簇,但不具备成为核心对象的密度条件,是聚类簇的边缘部分。
-
离群点(Outlier/Noise):数据点 N 既不是核心对象,也无法从任何核心对象密度可达,则称其为离群点。离群点不隶属于任何聚类簇,代表数据集中的噪声或异常值,这也是 DBSCAN 算法 "带噪声" 特性的体现。
可总结为一张图
DBSCAN 算法实现过程
DBSCAN 算法的实现逻辑清晰,主要分为四个核心步骤,无需迭代计算,效率较高:
(一)输入参数与数据集
首先需要明确算法的输入内容:一是待聚类的原始数据集,数据集可以是二维、三维甚至高维空间中的数据点集合;二是两个关键参数,即 E 邻域半径 ε 和密度阈值 MinPts。这两个参数的选择是 DBSCAN 算法应用的核心,后续会详细介绍参数选择的方法。
(二)遍历数据点,识别核心对象
遍历数据集中的每一个数据点,对于每个点,计算其 E 邻域内包含的其他数据点数量。若该数量大于或等于 MinPts,则将该点标记为核心对象,存入核心对象集合中。这一步骤的核心是筛选出密度足够高的 "种子点",为后续聚类簇的形成奠定基础。
(三)基于核心对象,扩展聚类簇
从核心对象集合中随机选取一个未被访问的核心对象,以该核心对象为起点,寻找所有从它密度可达的数据点,这些点共同构成一个聚类簇。在扩展过程中,若遇到其他未被访问的核心对象,将其所有密度可达的点也纳入当前聚类簇,直到没有新的数据点可以加入该簇为止。此时,该聚类簇构建完成,标记簇内所有点为已访问。
(四)标记离群点
重复步骤(三),直到所有核心对象都被访问完毕。此时,数据集中未被任何聚类簇包含的点,即为离群点(噪声点),将其单独标记。至此,整个聚类过程结束,最终得到若干个密度相连的聚类簇和一组离群点。
可总结为以下三点
DBSCAN 算法的优缺点
(一)优点
-
无需指定簇数量:与 K-means 不同,DBSCAN 无需人工预先确定聚类簇的数量,可根据数据的密度分布自动识别簇的个数,降低了参数设置的难度。
-
支持任意形状簇:这是 DBSCAN 最突出的优势,它不受簇形状的限制,无论是环形、条形还是不规则形状的簇,都能准确识别,适用于处理复杂结构的数据集。
-
天然识别噪声:算法在聚类过程中可直接标记离群点,无需额外的噪声检测步骤,对含有噪声的数据集具有较强的鲁棒性。
-
对数据分布无要求:无需假设数据服从某种特定的分布(如正态分布),可处理密度不均匀、分布复杂的数据集。
(二)缺点
-
参数敏感性高:ε 和 MinPts 的取值对聚类结果影响极大,参数设置不当可能导致聚类效果极差(如簇被拆分或合并,噪声点过多或过少)。
-
高维数据处理能力有限:在高维空间中,距离的定义变得模糊,E 邻域的密度计算准确性下降,导致聚类效果变差。此时需要结合 PCA 等降维技术预处理数据。
-
密度不均匀数据集处理困难:当数据集中不同簇的密度差异较大时,统一的 ε 和 MinPts 难以适应所有簇,可能导致密度较低的簇被误判为噪声,或密度较高的簇被拆分。
-
大规模数据集效率较低:朴素的 DBSCAN 算法时间复杂度为 O (n²),对于百万级以上的大规模数据集,计算每个点的 E 邻域会消耗大量时间和内存,需通过空间索引(如 KD 树、R 树)优化
DBSCAN的API参数
class sklearn.cluster.DBSCAN (eps=0.5 , min_samples=5 , metric='euclidean' , metric_params=None , algorithm='auto' , leaf_size=30 , p=None , n_jobs=None )
eps : DBSCAN算法参数,即我们的ϵϵ-邻域的距离阈值,和样本距离超过ϵϵ的样本点不在ϵϵ-邻域内。默认值是0.5.一般需要通过在多组值里面选择一个合适的阈值。eps过大,则更多的点会落在核心对象的ϵϵ-邻域,此时我们的类别数可能会减少, 本来不应该是一类的样本也会被划为一类。反之则类别数可能会增大,本来是一类的样本却被划分开。
min_samples: DBSCAN算法参数,即样本点要成为核心对象所需要的ϵϵ-邻域的样本数阈值。默认值是5. 一般需要通过在多组值里面选择一个合适的阈值。通常和eps一起调参。在eps一定的情况下,min_samples过大,则核心对象会过少,此时簇内部分本来是一类的样本可能会被标为噪音点,类别数也会变多。反之min_samples过小的话,则会产生大量的核心对象,可能会导致类别数过少。
metric: 最近邻距离度量参数。可以使用的距离度量较多,一般来说DBSCAN使用默认的欧式距离(即p=2的闵可夫斯基距离)就可以满足我们的需求。可以使用的距离度量参数有:
a) 欧式距离 "euclidean":
b) 曼哈顿距离 "manhattan"
c) 切比雪夫距离"chebyshev"
...
还有一些其他不是实数的距离度量,一般在DBSCAN算法用不上,这里也就不列了。
metric_params ******:******不用管。
******algorithm:******最近邻搜索算法参数,算法一共有三种,第一种是蛮力实现,第二种是KD树实现,第三种是球树实现。对于这个参数,一共有4种可选输入,'brute'对应第一种蛮力实现,'kd_tree'对应第二种KD树实现,'ball_tree'对应第三种的球树实现, 'auto'则会在上面三种算法中做权衡,选择一个拟合最好的最优算法。需要注意的是,如果输入样本特征是稀疏的时候,无论我们选择哪种算法,最后scikit-learn都会去用蛮力实现'brute'。个人的经验,一般情况使用默认的 'auto'就够了。 如果数据量很大或者特征也很多,用"auto"建树时间可能会很长,效率不高,建议选择KD树实现'kd_tree',此时如果发现'kd_tree'速度比较慢或者已经知道样本分布不是很均匀时,可以尝试用'ball_tree'。而如果输入样本是稀疏的,无论你选择哪个算法最后实际运行的都是'brute'。
******p:******最近邻距离度量参数。只用于闵可夫斯基距离和带权重闵可夫斯基距离中p值的选择,p=1为曼哈顿距离, p=2为欧式距离。如果使用默认的欧式距离不需要管这个参数。
【属性】
Labels_:
每个点的分类标签。