一、图的基本定义
✅ 什么是图?
图(Graph) 是由 顶点(Vertex)集合 V 和 边(Edge)集合 E 组成的一种非线性数据结构。
- 若边有方向 → 有向图
- 若边无方向 → 无向图
- 边有权重 → 带权图(网)
🔑 基本术语
| 术语 | 说明 |
|---|---|
| 度 | 顶点的边数;有向图中分为入度和出度 |
| 路径 | 从一个顶点到另一个顶点的顶点序列 |
| 连通图 | 任意两点间都有路径(无向图) |
| 强连通图 | 任意两点间都有双向路径(有向图) |
💡 考点:判断图的类型、计算度数、找路径长度
二、图的存储结构
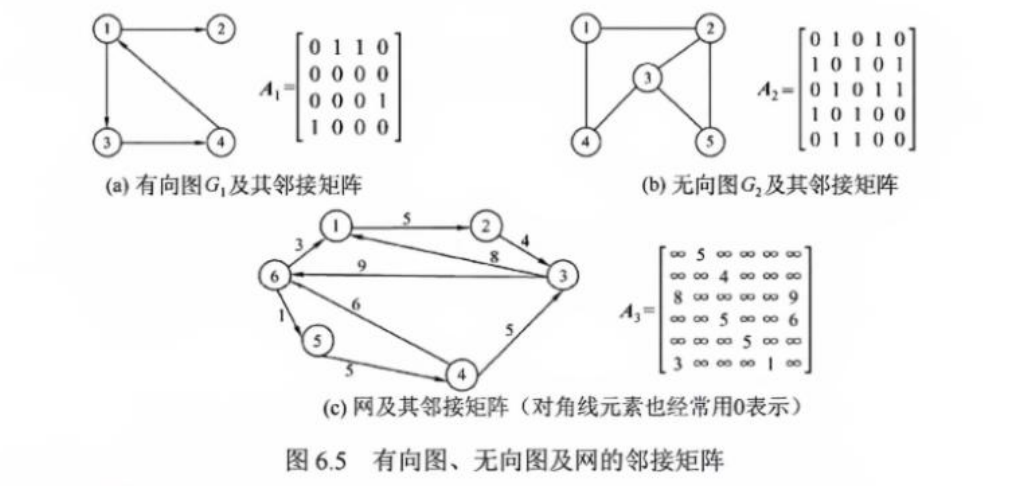
1. 邻接矩阵法(Adjacency Matrix)
- 用二维数组表示顶点间的连接关系
matrix[i][j] = 1表示存在边,否则为 0(或无穷大表示无边)
✅ 优点:
- 简单直观,便于判断任意两点是否相连
- 适合稠密图
❌ 缺点:
- 空间复杂度 O(n^2) ,稀疏图浪费严重
- 修改边操作较慢
✍️ 存储结构:
#define MaxVertexNum 100 // 顶点数目的最大值
typedef char VertexType; // 顶点对应的数据类型
typedef int EdgeType; // 边对应的数据类型
typedef struct {
VertexType vex[MaxVertexNum]; // 顶点表
EdgeType edge[MaxVertexNum][MaxVertexNum]; // 邻接矩阵,边表
int vexnum, arcnum; // 图当前的顶点数和边数
} MGraph;📌 考点:画邻接矩阵、判断是否连通
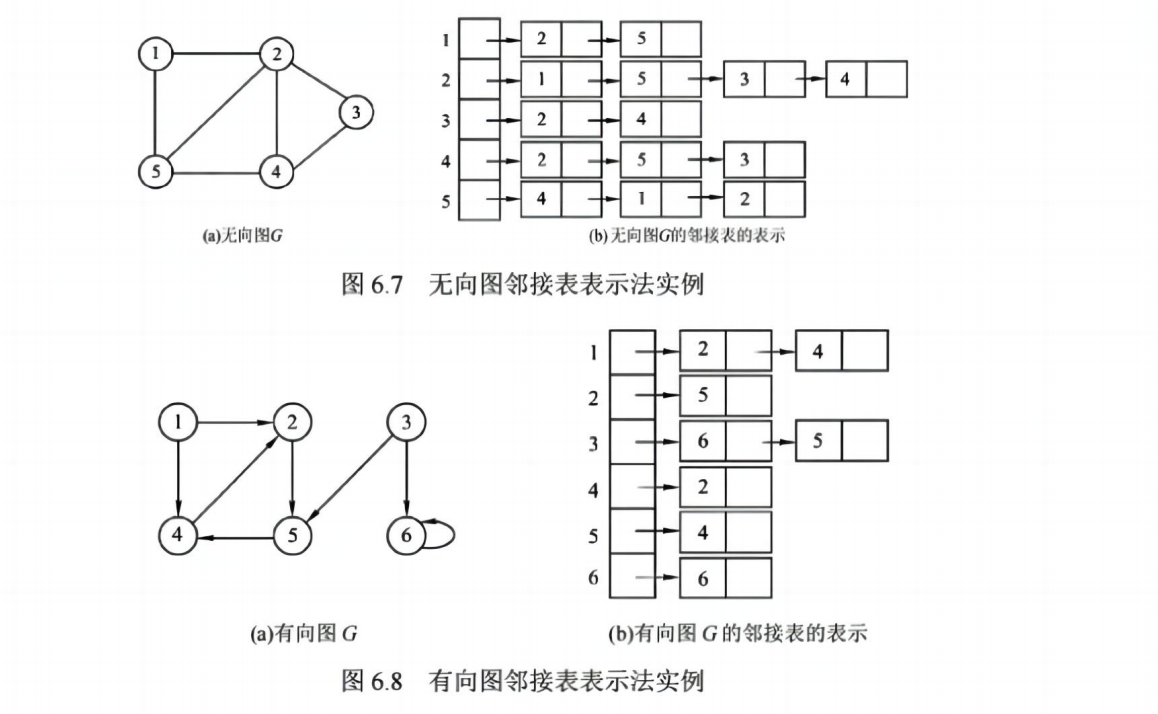
2. 邻接表法(Adjacency List)
- 每个顶点对应一个链表,存储其所有邻接顶点
- 适合稀疏图
✅ 优点:
- 存储空间节省, O(n+e)
- 遍历邻接顶点高效
❌ 缺点:
- 判断两个顶点是否直接相连需遍历链表
✍️ 存储结构:
cpp
typedef char VertexType; // 顶点对应的数据类型
#define MaxVertexNum 100 // 顶点数目的最大值
typedef struct ArcNode { // 边表结点
int adjvex; // 该弧所指向的顶点的位置
struct ArcNode *nextarc; // 指向下一条弧的指针
} ArcNode;
typedef struct VNode {
VertexType data; // 顶点信息
ArcNode *firstarc; // 指向第一条依附该结点的弧的结点
} VNode, AdjList[MaxVertexNum];
typedef struct {
AdjList vertices; // 邻接表
int vexnum, arcnum; // 图的顶点数和弧数
} ALGraph; // ALGraph是以邻接表存储的图类型📌 考点:画邻接表、理解头结点与边结点
3. 十字链表(用于有向图)
- 结合邻接表和逆邻接表,每个边结点有两个指针
- 便于查找某顶点的出边和入边
✍️ 存储结构

🔹 弧结点(Arc Node)
弧结点用于表示一条有向边(弧) ,每个弧对应一个 headvex 和 tailvex 的关系。
| 域名 | 含义 |
|---|---|
| tailvex | 表示该弧的尾顶点编号 (即起点) 👉 指向这条边从哪个顶点出发。 |
| headvex | 表示该弧的头顶点编号 (即终点) 👉 指向这条边指向哪个顶点。 |
| hlink | 指向以同一头顶点 (即 headvex 相同)的下一个弧结点 👉 构成"逆邻接表":所有指向某个顶点的边连在一起。 |
| tlink | 指向以同一尾顶点 (即 tailvex 相同)的下一个弧结点 👉 构成"邻接表":所有从某个顶点发出的边连在一起。 |
| (info) | 可选字段,用于存储边的附加信息 ,如权重、长度等 👉 在无权图中可省略。 |
✅ 总结:
tlink实现了出边链表(从某顶点出发的所有边)hlink实现了入边链表(指向某顶点的所有边)- 这种双重链接结构使得可以快速访问某顶点的出边和入边
🔹 顶点结点(Vertex Node)
顶点结点用于表示图中的每一个顶点。
| 域名 | 含义 |
|---|---|
| data | 存储该顶点的数据信息 ,如顶点名称、值等 👉 例如:城市名、任务名等。 |
| firstin | 指向以该顶点为头顶点 的第一个弧结点(即指向它的第一条边) 👉 即该顶点的入边链表头指针。 |
| firstout | 指向以该顶点为尾顶点 的第一个弧结点(即从它发出的第一条边) 👉 即该顶点的出边链表头指针。 |
✅ 总结:
firstout→ 从该顶点出发的所有边(出度)firstin→ 指向该顶点的所有边(入度)
🔹 示例图
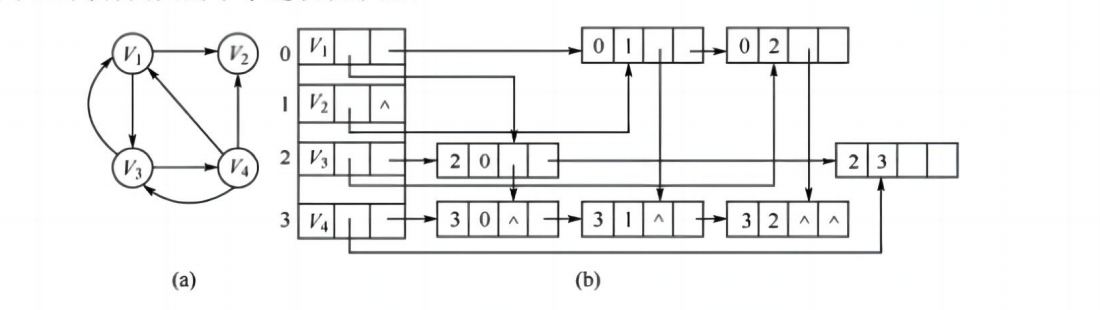
⚠️ 注:主要用途是支持有向图的边操作,近年未考
4. 邻接多重表(用于无向图)
- 一条边用两个边结点表示,共享同一记录
- 便于删除边(如网络拓扑)
✍️ 存储结构
🔹 边结点(Edge Node)

| 域名 | 含义 |
|---|---|
| ivex | 该边连接的第一个顶点的编号 |
| jvex | 该边连接的第二个顶点的编号 |
| ilink | 指向另一个与 ivex 相连的边(即从 ivex 出发的下一条边) |
| jlink | 指向另一个与 jvex 相连的边(即从 jvex 出发的下一条边) |
| (info) | 可选字段,存储边的附加信息(如权重) |
💡 关键理解:
- 一条边
(u, v)被存为一个结点- 它通过
ilink接入 u 的边链表- 同时通过
jlink接入 v 的边链表- 因此,删除一条边只需修改两个指针,而不用像邻接表那样删两次
🔹 顶点结点(Vertex Node)------每个顶点一个

| 域名 | 含义 |
|---|---|
| data | 存储顶点的数据(如名称、编号) |
| firstedge | 指向第一条与该顶点相连的边(即该顶点的边链表头指针) |
✅ 举例:顶点 A
firstedge指向任意一条包含 A 的边(如 A---B)- 通过该边的
ilink或jlink(取决于 A 是 ivex 还是 jvex),可继续找到 A 的其他邻边
🔹 示例图
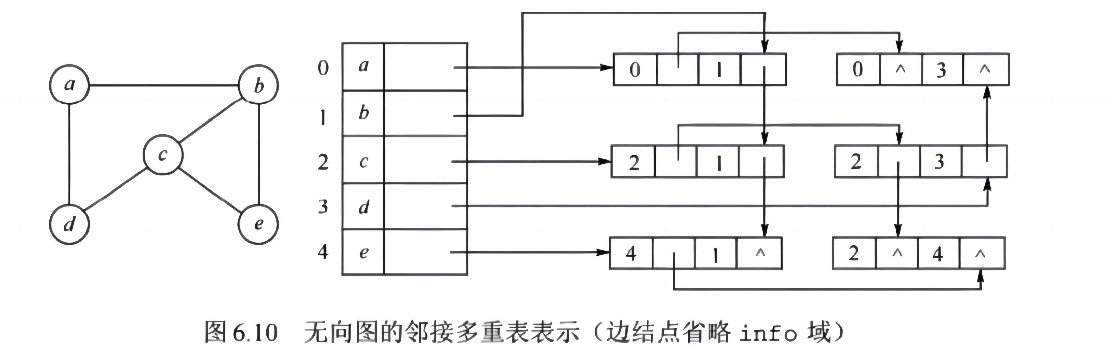
⚠️ 注:仅适用于无向图,考研较少考
✅ 存储方式对比表
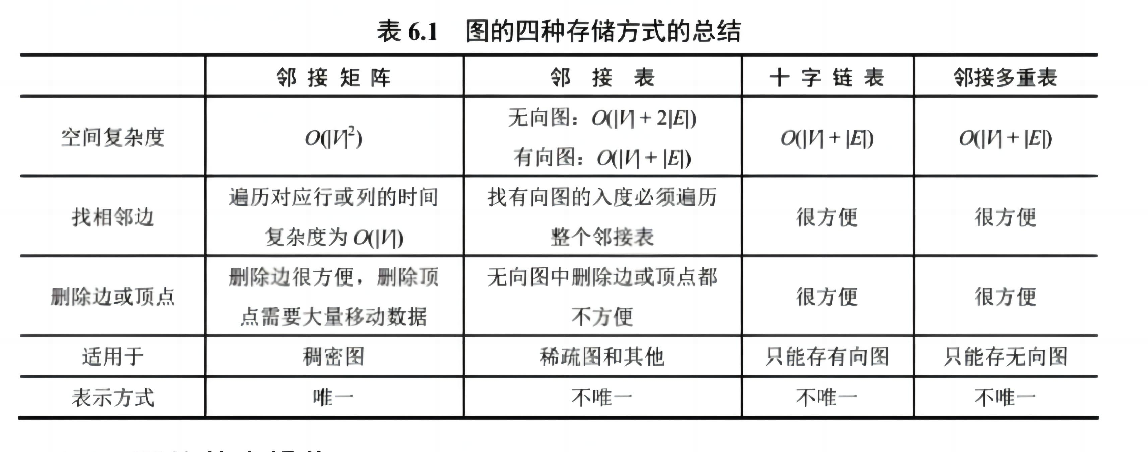
✅ 考研重点:邻接矩阵 vs 邻接表 的优缺点对比(必考选择题)
三、图的遍历(核心考点)
图的遍历是后续算法的基础,必须掌握!
1. 深度优先遍历(DFS)
- 类似树的前序遍历,使用栈 或递归实现
- 从某个顶点出发,尽可能深地访问子节点
✅ 特点:
- 可用于求解连通分量、拓扑排序、判断环
📌 算法步骤:
- 标记当前顶点已访问
- 依次访问其未访问的邻接顶点(递归)
- 回溯
💡 考点:手写 DFS 序列、判断是否连通
2. 广度优先遍历(BFS)
- 使用队列,逐层扩展
- 从起点开始,先访问距离为 1 的顶点,再访问距离为 2 的......
✅ 特点:
- 可用于求最短路径(无权图)、层次遍历
📌 算法步骤:
- 将起点入队
- 出队一个顶点,访问其所有未访问邻接顶点并入队
- 重复直到队空
💡 考点:手写 BFS 序列、求最短路径(无权图)
✅ DFS vs BFS 对比
| 项目 | DFS | BFS |
|---|---|---|
| 数据结构 | 栈 / 递归 | 队列 |
| 是否保证最短路径 | 否 | 是(无权图) |
| 时间复杂度 | O(n+e) | O(n+e) |
| 空间复杂度 | O(n) | O(n) |
| 适用场景 | 连通性、环检测 | 最短路径、层次遍历 |
✅ 考研重点:会手写 DFS/BFS 遍历序列(给图后填空)
四、图的相关应用(重中之重!)
1. 最小生成树(MST)
在连通无向图中,选出 n-1 条边,使所有顶点连通且总权重最小。
✅ 两种经典算法:
| 算法 | 思想 | 时间复杂度 |
|---|---|---|
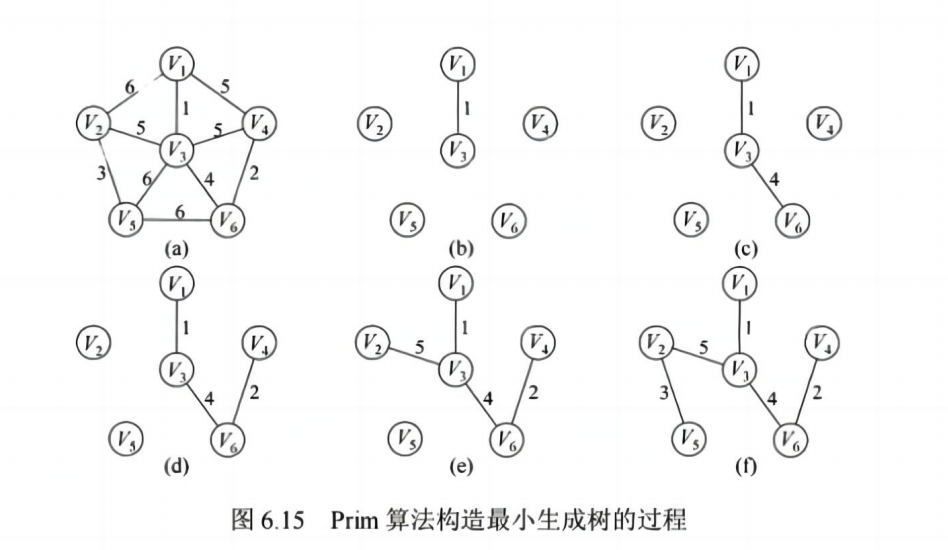
| Prim 算法 | 从一个顶点开始,逐步加入最近的顶点 | O(n^2) 或 O(elog2n) |
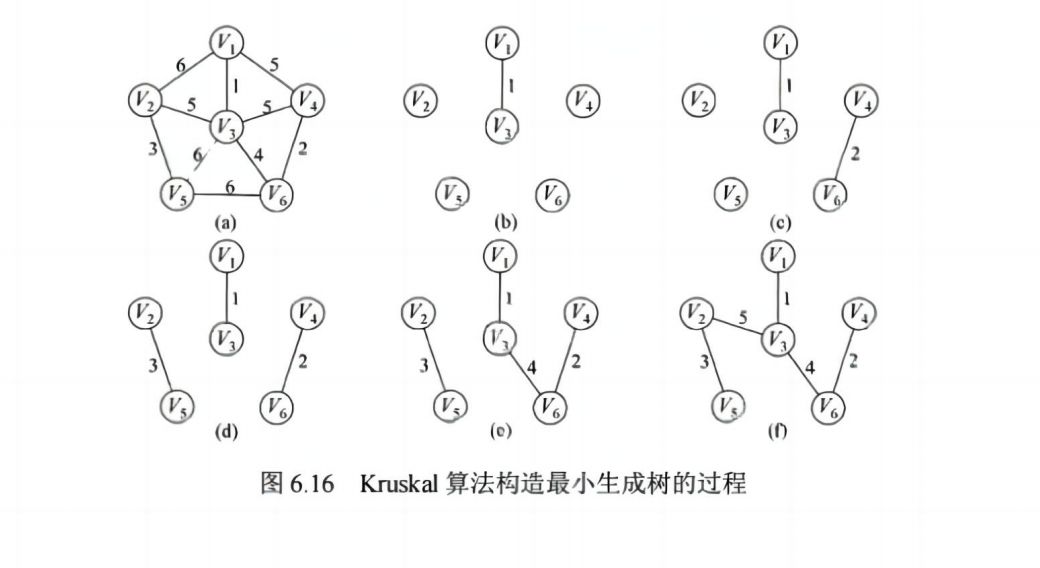
| Kruskal 算法 | 按边权从小到大选边,避免成环 | O(elog2e) |
📌 区别:
- Prim:适合稠密图(顶点多)
- Kruskal:适合稀疏图(边少)
💡 考点:比较两者的区别、手写 Prim/Kruskal 步骤
2. 最短路径
✅ Dijkstra 算法(单源最短路径)
- 从起点出发,每次选择距离最小的未访问顶点
- 适用于非负权图
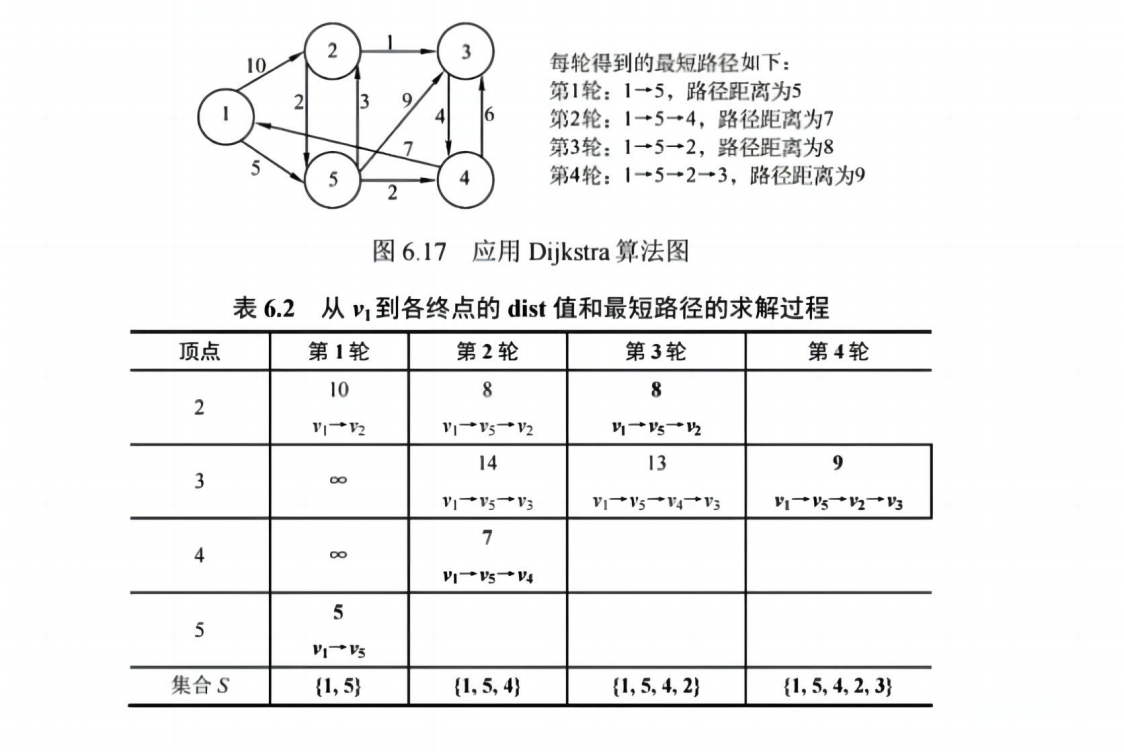
⚠️ 不适用于负权边!
✅ Floyd 算法(多源最短路径)
- 动态规划思想,枚举中间点
- 求任意两点间最短路径
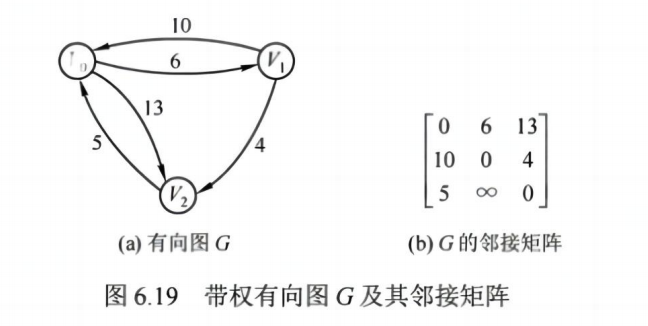
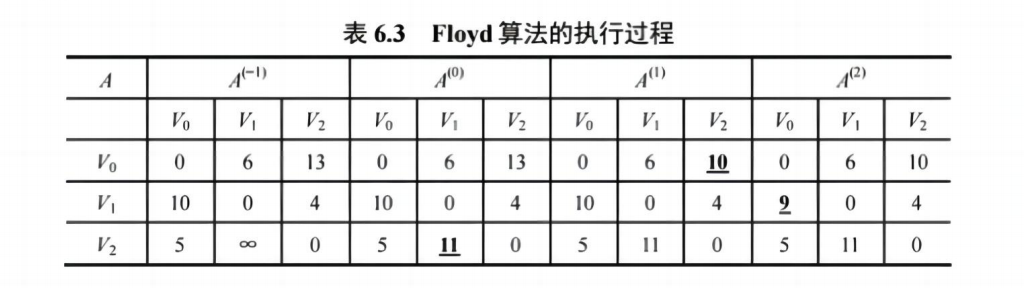
✅ 时间复杂度: O(n^3),适合小规模图
✅ 最短路径算法对比表
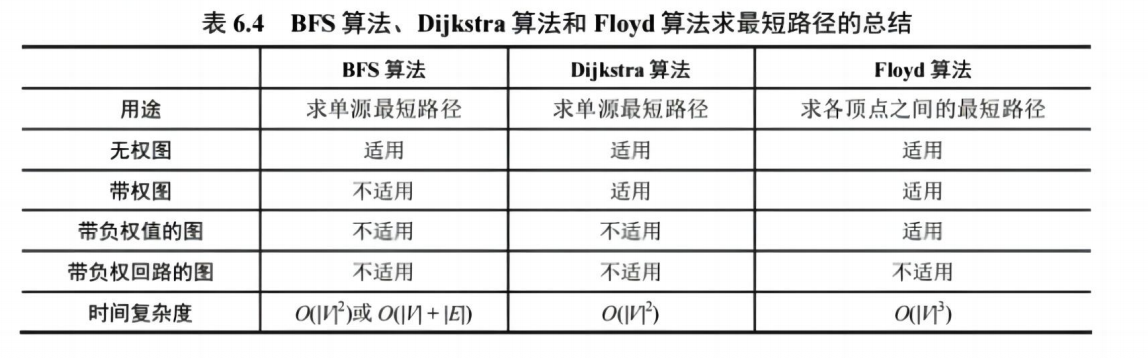
💡 考点:Dijkstra 与 Floyd 的应用场景对比、手写 Dijkstra 步骤
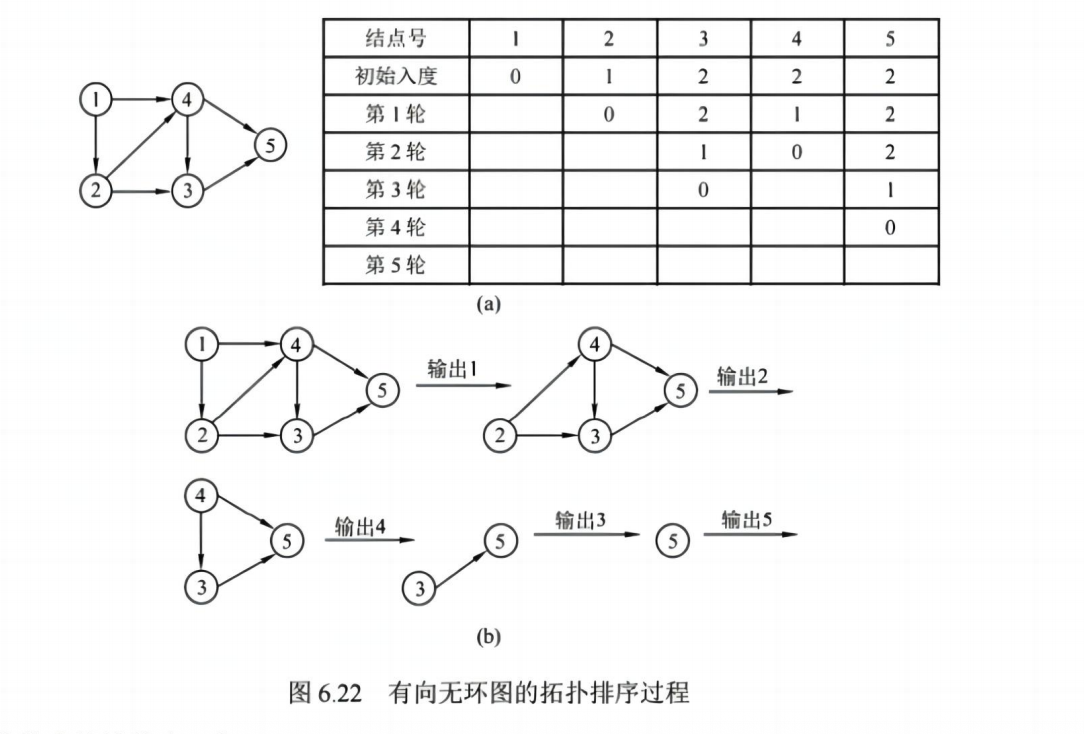
3. 拓扑排序(AOV 网)
AOV 网(Activity On Vertex):顶点表示活动,边表示依赖关系
✅ 拓扑排序规则:
- 找入度为 0 的顶点
- 删除该顶点及其出边
- 重复直到无顶点可删
✅ 排序过程
✅ 应用:
- 课程安排、任务调度
💡 考点:判断是否有环、手写拓扑序列
4. 关键路径(AOE 网)
AOE 网(Activity On Edge):边表示活动,顶点表示事件
✅ 核心概念:
- 关键路径:从起点到终点的最长路径
- 关键活动:在关键路径上的活动
- 最早发生时间(ve):顶点最早能发生的时刻
- 最迟发生时间(vl):顶点最晚不能超过的时刻
✅ 求解步骤:
- 求 ve(正向 DP)
- 求 vl(反向 DP)
- 求每个活动的最早开始时间(e)和最迟开始时间(l)
- 若 e == l,则为关键活动
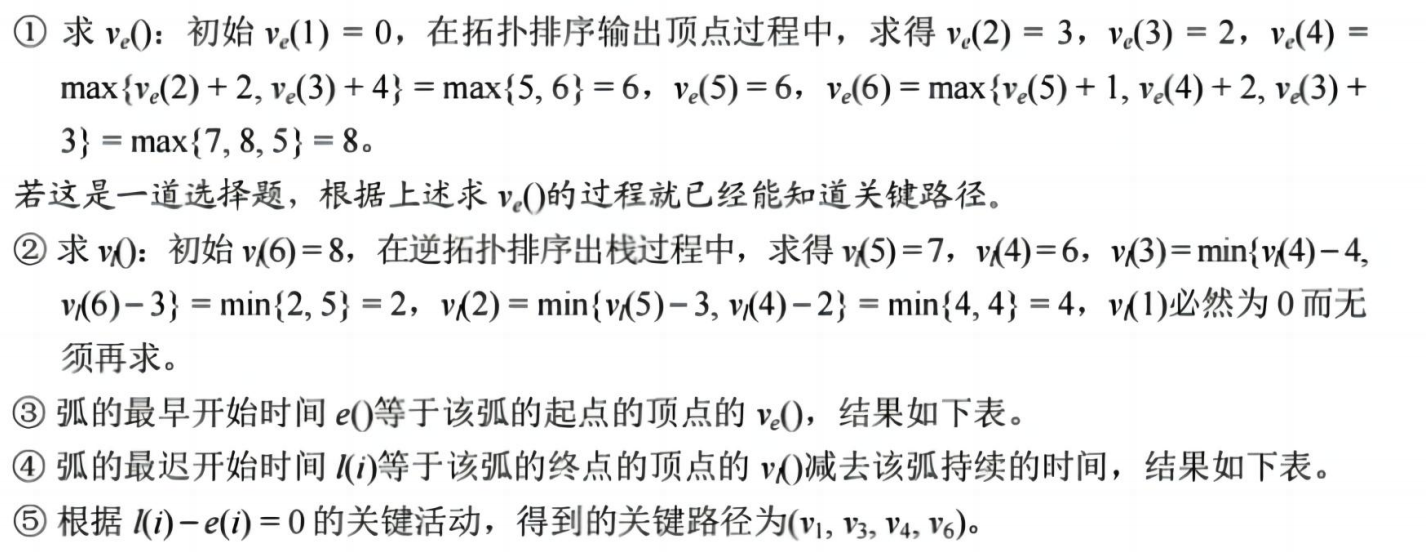
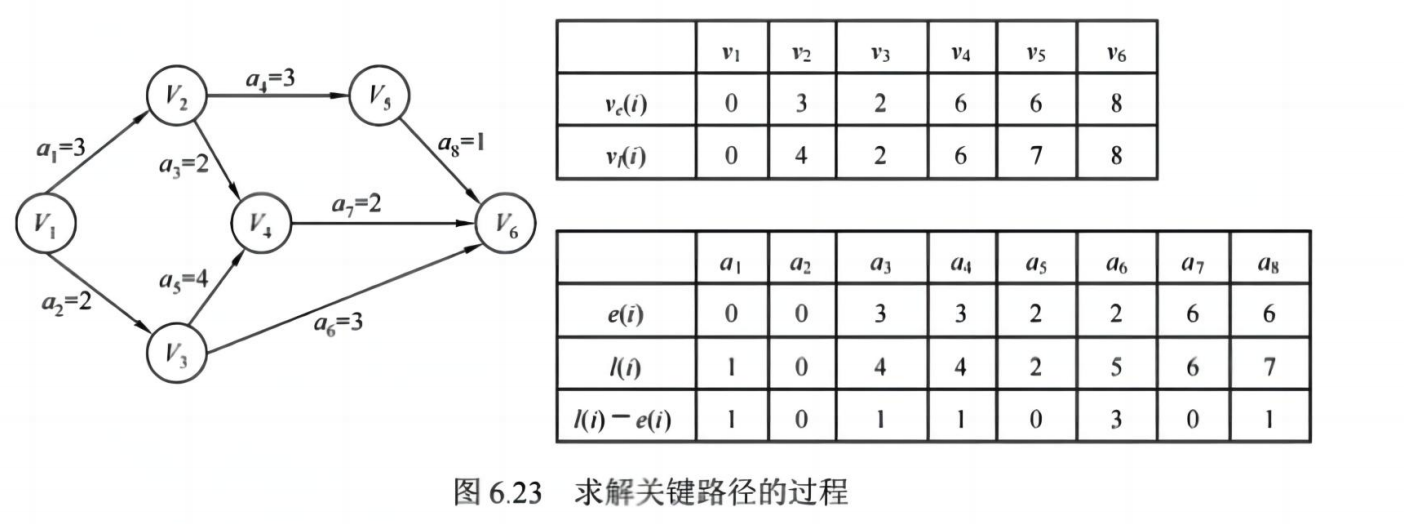
💡 考点:求关键路径、判断关键活动
五、高频考点总结
| 题型 | 考点 |
|---|---|
| 选择题 | - 图的存储方式对比 - DFS/BFS 的特点 - MST 算法适用场景 |
| 填空题 | - 写出 DFS/BFS 遍历序列 - 求最小生成树边数 |
| 简答题 | - 解释 DFS 与 BFS 的区别 - 说明 Dijkstra 为何不能处理负权边 |
| 算法题 | - 手写 Prim/Kruskal 步骤 - 实现拓扑排序 - 求关键路径 |
图相关算法时间复杂度对比

六、一句话口诀(背下来!)
"图存邻接表,遍历看 DFS/BFS;
最小生成树 用 Prim/Kruskal,最短路径 Dijkstra 和 Floyd;
拓扑排 AOV,关键路 AOE!"