解决无人机移动后飞控位置偏移问题:Fast-LIO到MAVROS视觉定位转换
问题描述
在使用无人机进行实际飞行时,发现一个问题:当将无人机移动到其他位置后再放回原处,飞控的local position ned会发生改变,导致无人机无法准确悬停在期望位置。经过分析,怀疑是因为没有将外部视觉定位数据正确发送给飞控。
本次使用的飞控版本是:PX4 1.16.0 stable
问题分析
代码结构检查
通过检查项目代码结构,发现:
- ego planner 不直接发布
/mavros/vision_pose/pose话题 - px4ctrl 仅订阅通用
odom话题,但不将其转发到飞控 - Fast-LIO 发布
/Odometry话题,但未直接与 MAVROS 集成
关键代码分析
查看 px4ctrl 模块的代码:
PX4CtrlFSM.cpp实现了状态机逻辑,包括起飞、降落、悬停等模式input.h定义了Odom_Data_t结构体,用于接收里程计数据px4ctrl_node.cpp订阅odom话题并绑定到Odom_Data_t::feed函数
发现 px4ctrl 模块虽然接收了里程计数据用于控制,但没有将这些数据发送回飞控进行位置修正。
解决方案
!!等待香橙派所有节点都启动完成后,再启动本次的里程计转发节点!!
创建一个转换节点,将 Fast-LIO 发布的 /Odometry 话题数据转换并发布到 /mavros/vision_pose/pose 话题,使飞控能够接收外部视觉定位数据。
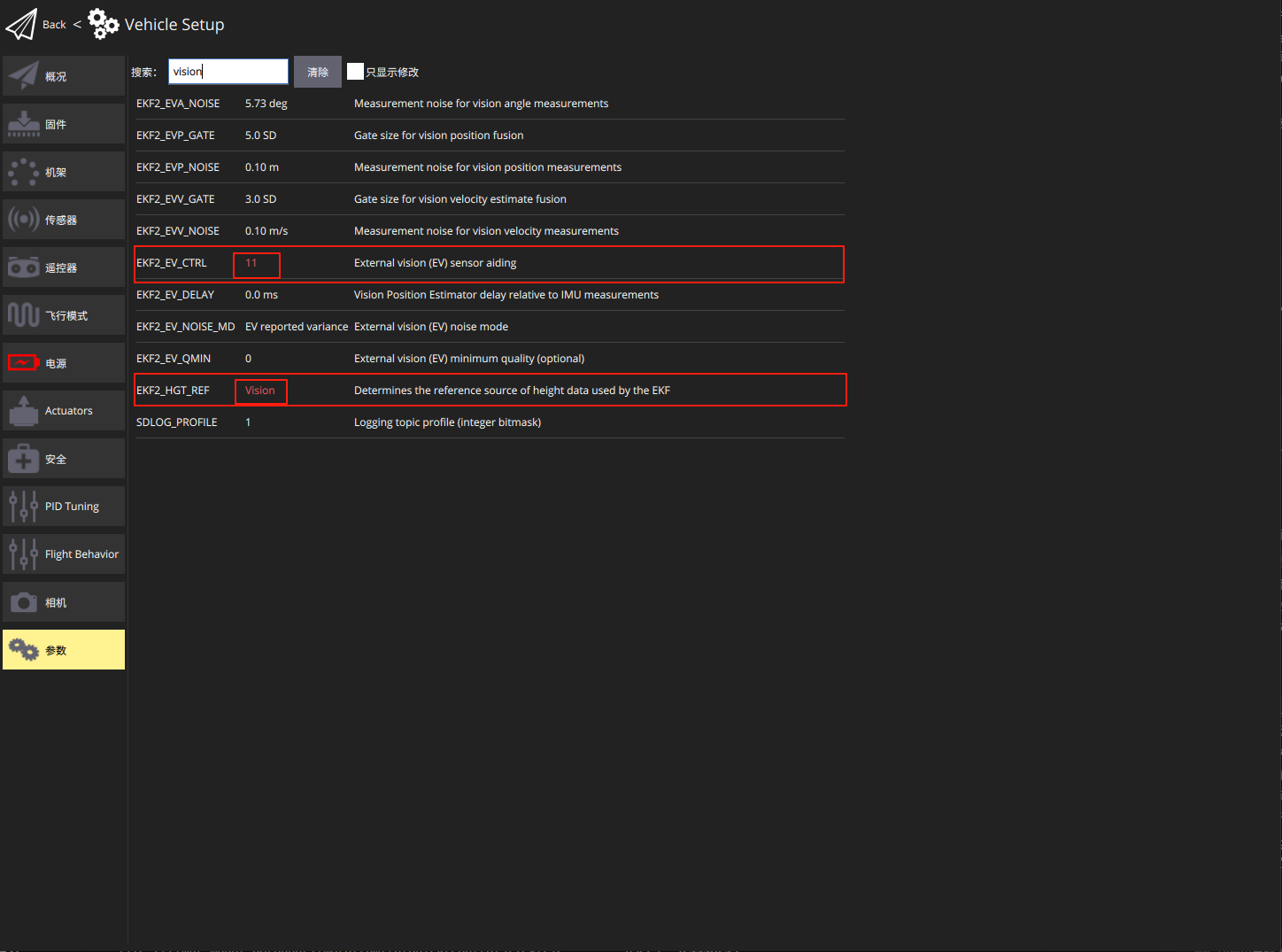
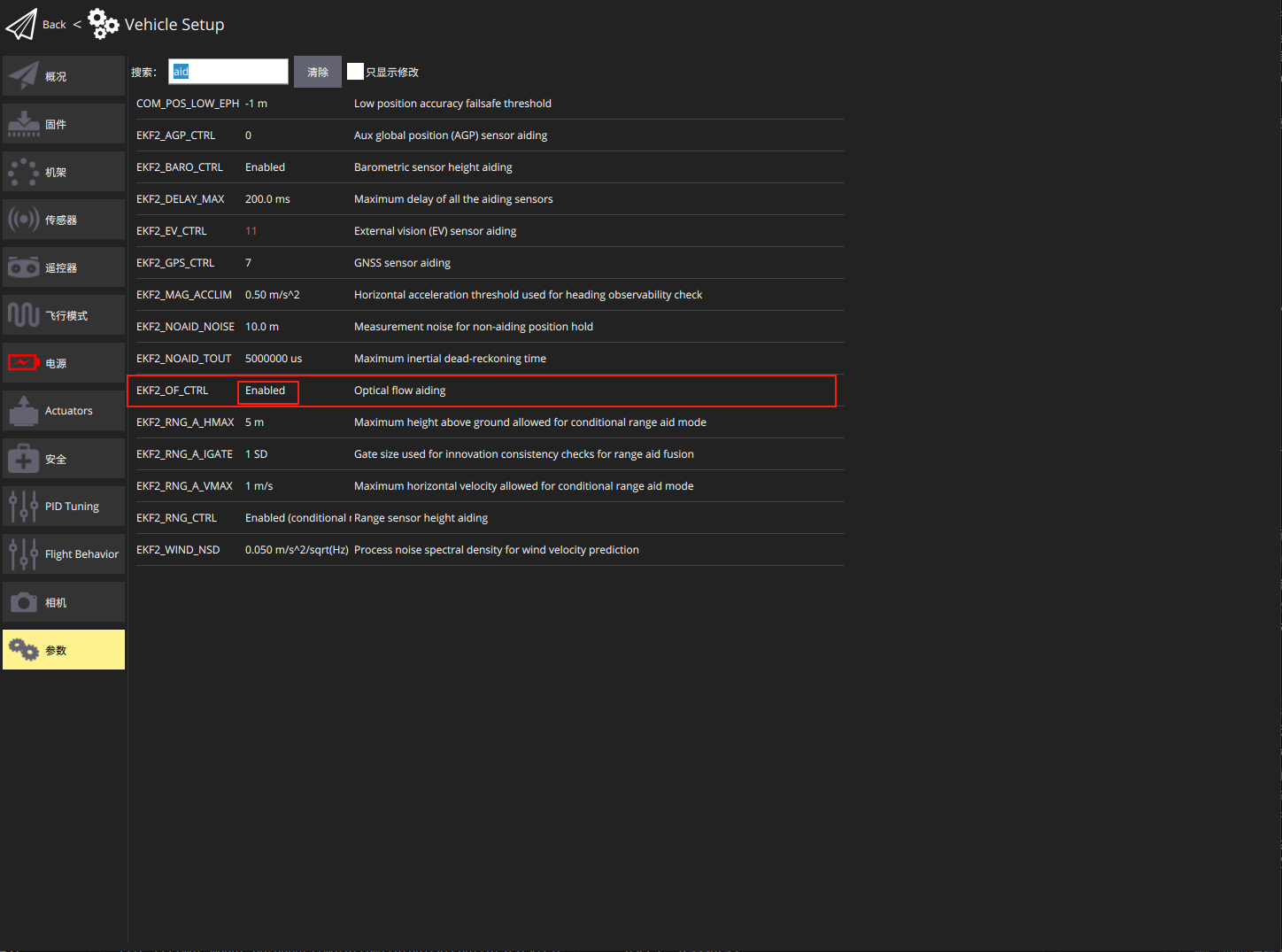
QGC设置飞控vision的ekf融合:
实现步骤
1. 创建功能包结构
bash
mkdir -p /home/rog/code/fast_drone_ws/src/fastlio_to_mavros/{launch,scripts}2. 配置文件
package.xml :定义功能包依赖和元信息
CMakeLists.txt :配置编译规则和安装路径
fastlio_to_mavros.launch:提供可配置的启动参数
3. 核心实现:优化后的转换脚本
python
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
import rospy
from nav_msgs.msg import Odometry
from geometry_msgs.msg import PoseStamped
import tf
import numpy as np
from collections import deque
# 滑动窗口平均类,用于平滑 yaw 值
class SlidingWindowAverage:
def __init__(self, window_size):
self.window_size = window_size
self.data_queue = deque(maxlen=window_size) # 使用固定大小的队列
def add_data(self, new_data):
# 如果队列非空且新数据与最新数据差异过大,重置队列
if self.data_queue and abs(new_data - self.data_queue[-1]) > 0.01:
self.data_queue.clear()
self.data_queue.append(new_data)
return self.get_avg()
def get_size(self):
return len(self.data_queue)
def get_avg(self):
if self.data_queue:
return sum(self.data_queue) / len(self.data_queue)
else:
return 0.0
class FastLIOToMavros:
def __init__(self):
rospy.init_node('fastlio_to_mavros', anonymous=True)
# 获取参数
self.window_size = rospy.get_param('~window_size', 8)
publish_rate = rospy.get_param('~publish_rate', 30.0)
# 初始化位姿和四元数
self.p_lidar_body = np.zeros(3)
self.q_mav = [0, 0, 0, 1]
self.q_px4_odom = [0, 0, 0, 1]
# 创建滑动窗口平均器
self.swa = SlidingWindowAverage(self.window_size)
# 初始化标志
self.init_flag = False
self.init_q = tf.transformations.quaternion_from_euler(0, 0, 0)
# 订阅和发布器
self.vins_sub = rospy.Subscriber('~fastlio_odom', Odometry, self.fastlio_callback, queue_size=10)
self.px4_odom_sub = rospy.Subscriber('~px4_odom', Odometry, self.px4_odom_callback, queue_size=10)
self.vision_pub = rospy.Publisher('~vision_pose', PoseStamped, queue_size=10)
# 定时器控制发布频率
self.timer = rospy.Timer(rospy.Duration(1.0/publish_rate), self.publish_vision_pose)
rospy.loginfo("FastLIO to MAVROS converter initialized")
rospy.loginfo(f"Window size: {self.window_size}, Publish rate: {publish_rate} Hz")
def from_quaternion_to_yaw(self, q):
# 将四元数转换为 yaw 角
euler = tf.transformations.euler_from_quaternion(q)
return euler[2]
def fastlio_callback(self, msg):
# 获取 Fast-LIO 提供的位姿和四元数
self.p_lidar_body = np.array([
msg.pose.pose.position.x,
msg.pose.pose.position.y,
msg.pose.pose.position.z
])
self.q_mav = [
msg.pose.pose.orientation.x,
msg.pose.pose.orientation.y,
msg.pose.pose.orientation.z,
msg.pose.pose.orientation.w
]
def px4_odom_callback(self, msg):
# 获取 PX4 的本地位置四元数,并计算 yaw 角
self.q_px4_odom = [
msg.pose.pose.orientation.x,
msg.pose.pose.orientation.y,
msg.pose.pose.orientation.z,
msg.pose.pose.orientation.w
]
# 更新滑动窗口平均
yaw = self.from_quaternion_to_yaw(self.q_px4_odom)
self.swa.add_data(yaw)
# 初始化 yaw 角
if self.swa.get_size() == self.window_size and not self.init_flag:
init_yaw = self.swa.get_avg()
self.init_q = tf.transformations.quaternion_from_euler(0, 0, init_yaw)
self.init_flag = True
rospy.loginfo(f"Initial yaw initialized: {init_yaw:.3f} rad")
def publish_vision_pose(self, event):
if not self.init_flag:
return
# 旋转位姿以对齐初始 yaw 角
rot_matrix = tf.transformations.quaternion_matrix(self.init_q)[:3, :3]
p_enu = np.dot(rot_matrix, self.p_lidar_body)
# 构建视觉位姿消息
vision_msg = PoseStamped()
vision_msg.header.stamp = rospy.Time.now()
vision_msg.header.frame_id = "map" # 根据实际情况设置
vision_msg.pose.position.x = p_enu[0]
vision_msg.pose.position.y = p_enu[1]
vision_msg.pose.position.z = p_enu[2]
vision_msg.pose.orientation.x = self.q_mav[0]
vision_msg.pose.orientation.y = self.q_mav[1]
vision_msg.pose.orientation.z = self.q_mav[2]
vision_msg.pose.orientation.w = self.q_mav[3]
# 发布消息
self.vision_pub.publish(vision_msg)
# 每100次发布打印一次信息(减少终端输出)
if rospy.get_time() % 10 < 0.01:
rospy.loginfo_throttle(1.0,
f"Position (ENU): x={p_enu[0]:.3f}, y={p_enu[1]:.3f}, z={p_enu[2]:.3f}"
)
def main():
try:
converter = FastLIOToMavros()
rospy.spin()
except rospy.ROSInterruptException:
rospy.loginfo("FastLIO to MAVROS converter shutting down")
pass
if __name__ == '__main__':
main()关键技术实现
1. 滑动窗口平均
实现了 SlidingWindowAverage 类,用于平滑 yaw 角数据,提高定位稳定性:
python
class SlidingWindowAverage:
def __init__(self, window_size):
self.window_size = window_size
self.data_queue = deque(maxlen=window_size) # 使用固定大小的队列
def add_data(self, new_data):
# 如果队列非空且新数据与最新数据差异过大,重置队列
if self.data_queue and abs(new_data - self.data_queue[-1]) > 0.01:
self.data_queue.clear()
self.data_queue.append(new_data)
return self.get_avg()2. 位姿转换与发布
将 Fast-LIO 提供的位姿数据转换为 MAVROS 所需的格式,并以稳定的频率发布:
python
def publish_vision_pose(self, event):
if not self.init_flag:
return
# 旋转位姿以对齐初始 yaw 角
rot_matrix = tf.transformations.quaternion_matrix(self.init_q)[:3, :3]
p_enu = np.dot(rot_matrix, self.p_lidar_body)
# 构建视觉位姿消息
vision_msg = PoseStamped()
vision_msg.header.stamp = rospy.Time.now()
vision_msg.header.frame_id = "map"
vision_msg.pose.position.x = p_enu[0]
vision_msg.pose.position.y = p_enu[1]
vision_msg.pose.position.z = p_enu[2]
vision_msg.pose.orientation.x = self.q_mav[0]
vision_msg.pose.orientation.y = self.q_mav[1]
vision_msg.pose.orientation.z = self.q_mav[2]
vision_msg.pose.orientation.w = self.q_mav[3]
# 发布消息
self.vision_pub.publish(vision_msg)代码优化
针对原始代码,进行了以下优化:
- 使用 rospy.Timer 控制发布频率:确保稳定的 30Hz 发布频率,避免依赖 while 循环的精度问题
- 使用固定大小的 deque:简化滑动窗口实现,自动管理队列大小
- 添加参数化配置:支持通过 launch 文件配置窗口大小和发布频率
- 优化日志输出:使用 throttle 减少终端输出频率,提高性能
- 改进初始化逻辑:更清晰的初始化状态管理,便于调试
编译与运行
编译功能包
bash
cd /home/rog/code/fast_drone_ws
catkin_make --pkg fastlio_to_mavros运行功能包
bash
roslaunch fastlio_to_mavros fastlio_to_mavros.launch检查是否输出数据:
bash
rostopic echo /mavros/vision_pose/pose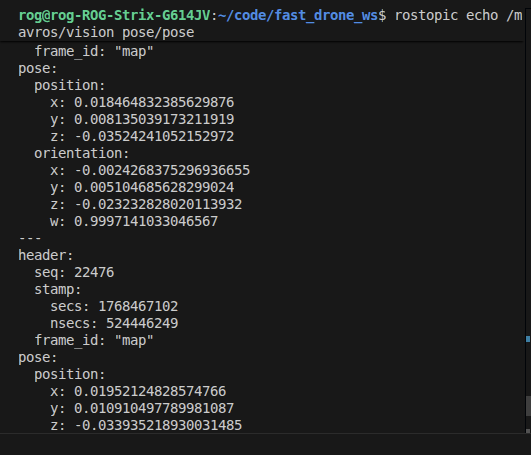 查看话题订阅关系:
查看话题订阅关系:
bash
rqt_graph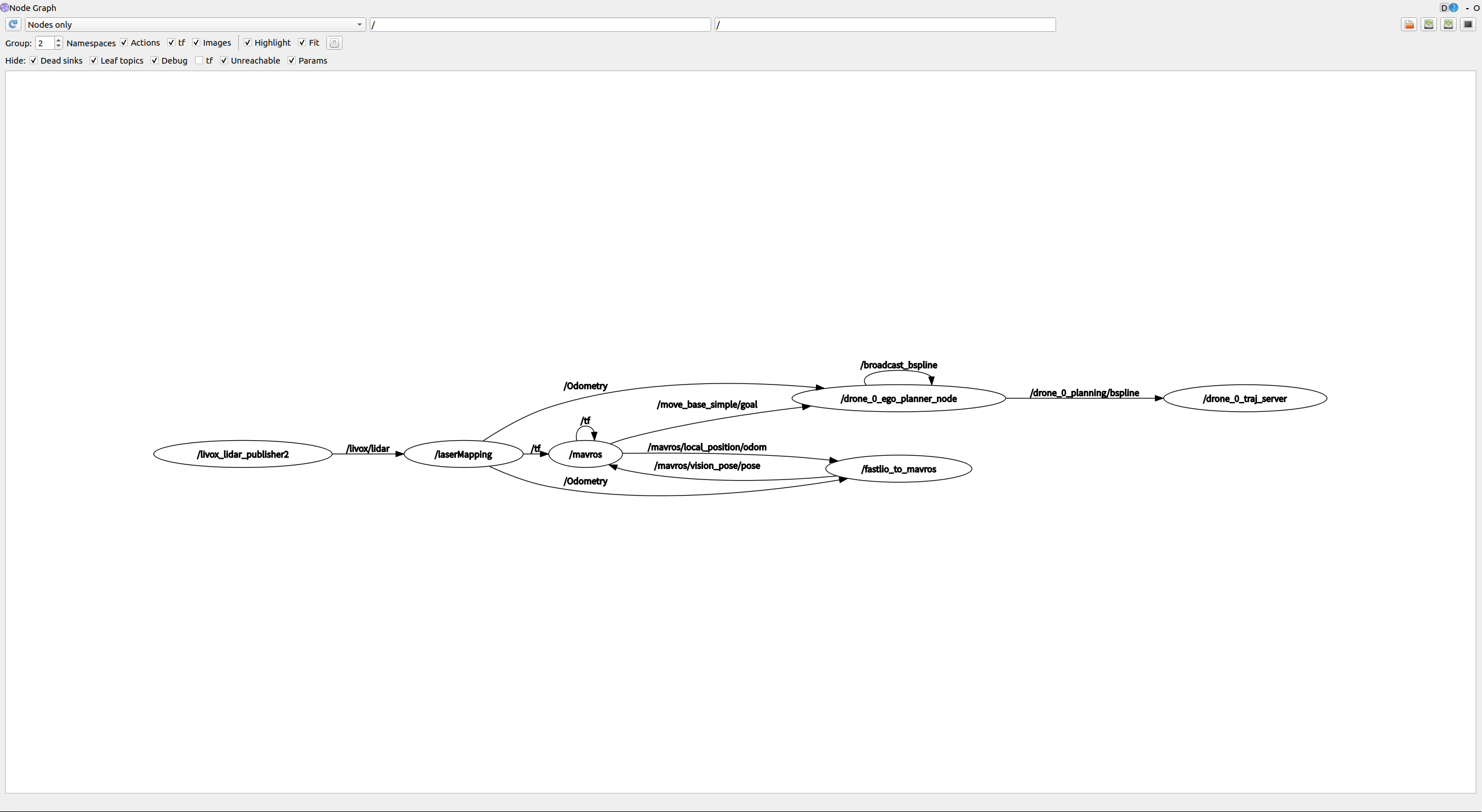
查看效果
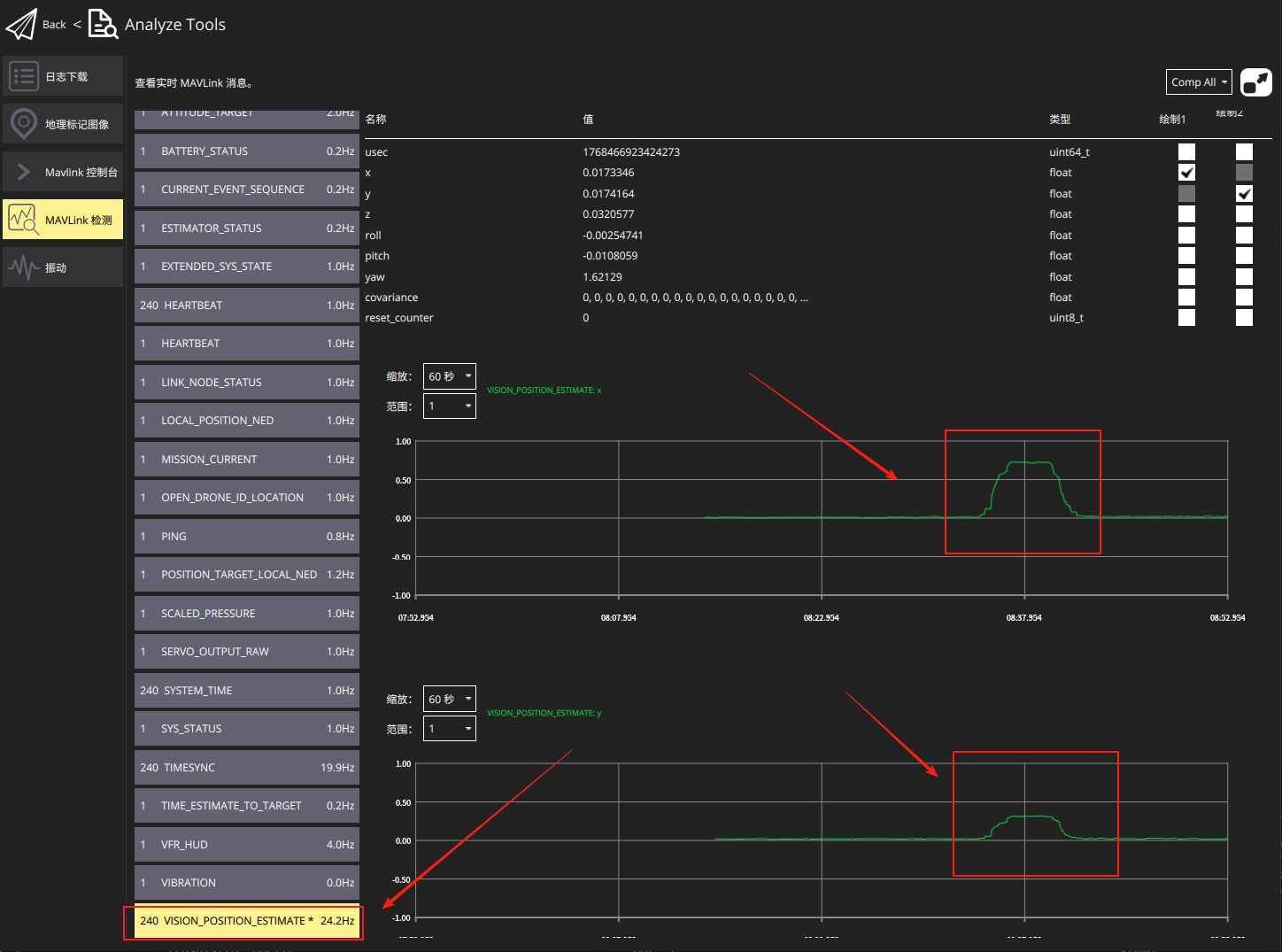
打开QGC到MAVLink检测,查看VISION_POSITION_ESTIMATE视觉位置估计:
运行里程计转发节点,查看EKF状态:
bash
rostopic echo /mavros/estimator_status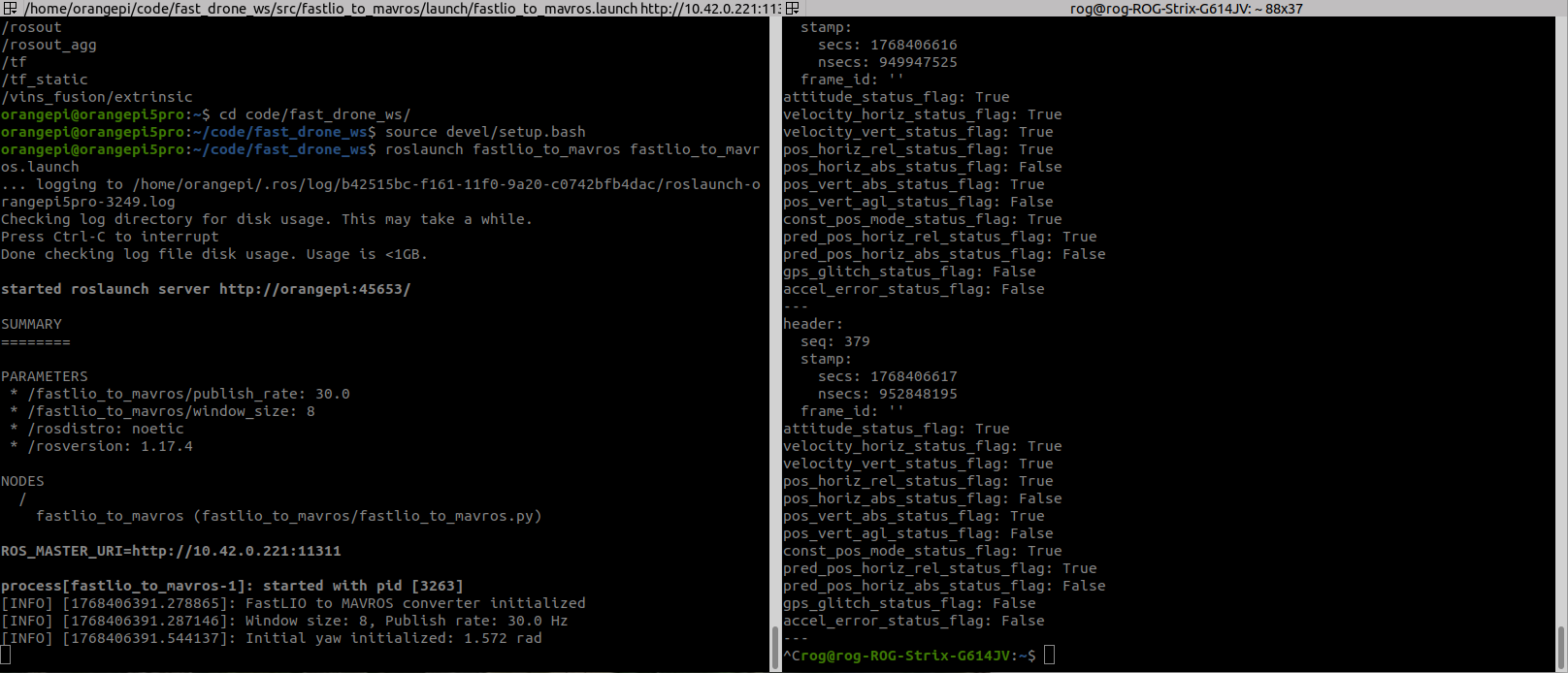 这份状态数据表明 核心定位问题已经解决 !所有自动驾驶必需的状态位均已变为
这份状态数据表明 核心定位问题已经解决 !所有自动驾驶必需的状态位均已变为 True,飞控已经具备执行 AUTO_HOVER 等自主模式的条件。
状态位关键变化解读
| 标志位 | 当前值 | 含义 | 状态判定 |
|---|---|---|---|
attitude_status_flag |
True | 姿态(滚转/俯仰/偏航)有效 | ✅ 基础条件满足 |
velocity_horiz_status_flag |
True | 水平速度有效 | ✅ 飞控能感知水平移动 |
pos_horiz_rel_status_flag |
True | 相对水平位置有效 | ✅ 核心!外部里程计已被PX4识别并启用 |
const_pos_mode_status_flag |
True | 位置控制模式已激活 | ✅ 飞控已准备好执行悬停/定位指令 |
pos_vert_abs_status_flag |
True | 垂直高度有效 | ✅ 定高功能正常 |
pos_horiz_abs_status_flag |
False | 绝对水平位置无效 | ❌ 无GPS,不影响(我们用相对定位) |
下一步:测试 AUTO_HOVER 模式(验证修复效果)
现在可以放心测试自主悬停,步骤如下:
-
重启所有节点 (确保配置生效)
bashpkill -9 roslaunch bash 你的启动脚本.sh # 包含mavros/Fast-LIO/里程计转发 -
解锁无人机(通过RC遥控器)
-
切换到 AUTO_HOVER 模式
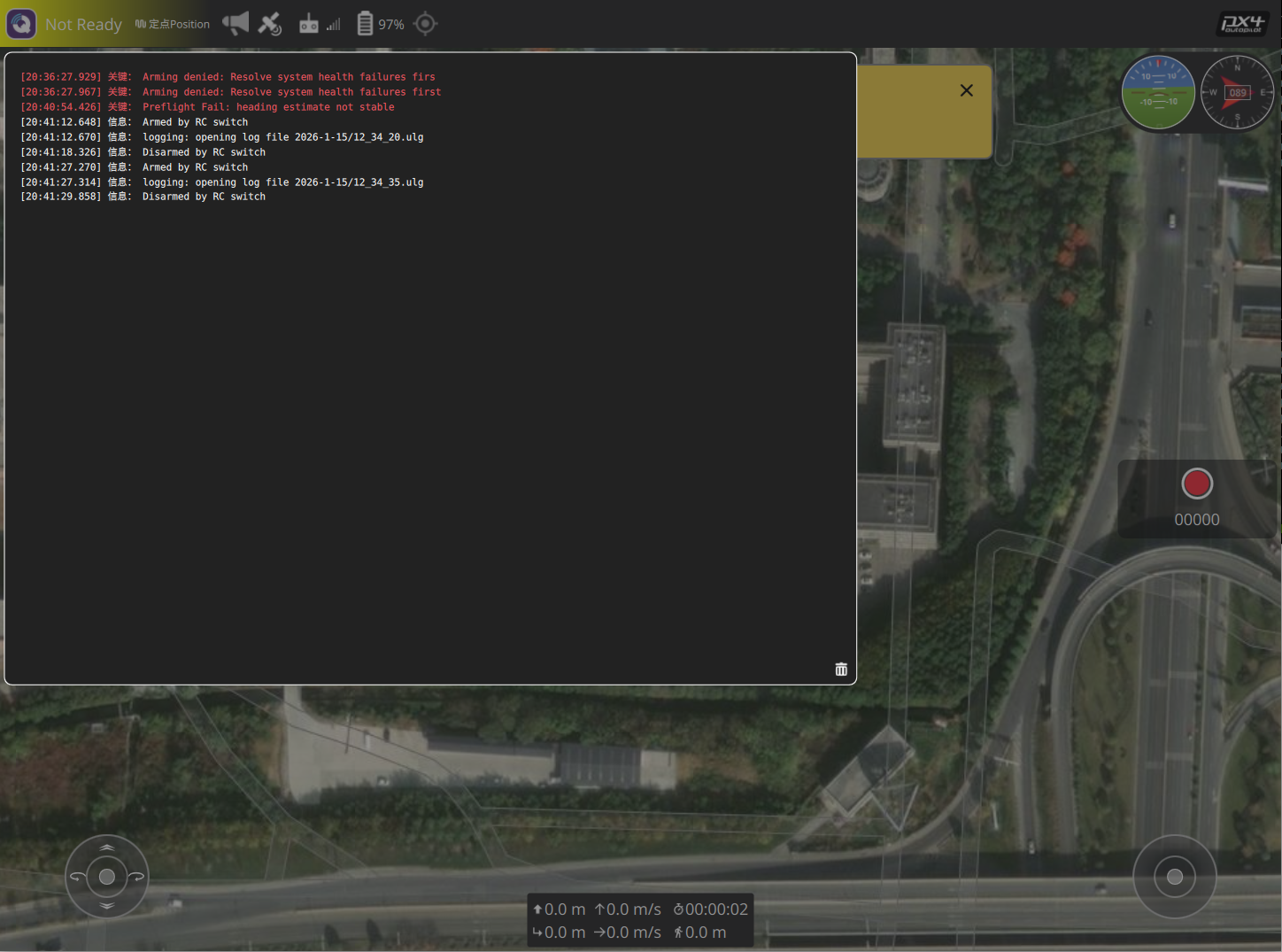
- 观察飞控日志,
Failsafe activated提示应该彻底消失; - 无人机应能稳定悬停,无漂移。
- 观察飞控日志,
优化参数,提升悬停稳定性
若悬停时有轻微漂移,可微调以下参数降低里程计噪声权重:
bash
# 降低外部里程计的位置噪声(让PX4更信任里程计数据)
rosrun mavros mavparam set EKF2_POS_NOISE 0.005
rosrun mavros mavparam set EKF2_VEL_NOISE 0.005
rosrun mavros mavparam save注意事项
- 确保话题正确 :确保 Fast-LIO 正在发布
/Odometry话题,MAVROS 已正确连接并发布/mavros/local_position/odom话题 - 飞控参数设置:需要在 PX4 飞控中启用视觉定位输入(EKF2 参数设置)
- 坐标系一致性:检查 Fast-LIO 和 PX4 使用的坐标系定义是否一致
- 启动顺序:建议先启动 Fast-LIO 和 MAVROS,再启动转换节点
结论
通过创建 fastlio_to_mavros 转换节点,成功将 Fast-LIO 的视觉定位数据发送给飞控,解决了无人机移动后飞控位置偏移的问题。该方案具有以下优点:
- 模块化设计:作为独立功能包,易于集成和维护
- 可配置性:支持通过参数调整窗口大小和发布频率
- 稳定性:使用滑动窗口平均提高了数据稳定性
- 高效性:优化的代码结构和日志输出,减少了系统资源占用
此实现为无人机提供了更准确的视觉定位,确保无人机在移动后放回原处时能够准确悬停在期望位置。
参考资料:
https://blog.csdn.net/qq_44998513/article/details/133144421