项目概述
创建一个完整的运动控制界面原型,模拟单轴运动控制系统的基本功能。这个项目将帮助你掌握 WinForms 的核心概念,为后续的运动控制卡开发打下基础。
项目目标
-
掌握 WinForms 常用控件的使用
-
理解事件驱动编程模型
-
学习窗体布局和界面设计
-
掌握数据绑定和状态显示
-
实现多窗体应用程序
-
练习 GDI+ 绘图(位置显示)
功能需求
1. 主界面功能
-
轴状态显示区
-
当前位置显示(Label 或 ProgressBar)
-
当前速度显示
-
轴状态指示(就绪/运动中/报警)- 使用不同颜色标识
-
-
参数设置区
-
目标位置输入(TextBox + NumericUpDown)
-
运行速度设置(TrackBar + TextBox)
-
加速度设置(TrackBar + TextBox)
-
-
手动操作区
-
正向点动按钮(JOG+)
-
反向点动按钮(JOG-)
-
回零按钮(Home)
-
急停按钮(Stop)- 红色,醒目
-
-
菜单栏
-
文件菜单:打开参数、保存参数、退出
-
设置菜单:参数配置(打开设置窗体)
-
帮助菜单:关于
-
-
状态栏
-
显示当前系统状态
-
显示连接状态(模拟)
-
2. 设置窗体功能
-
轴参数配置
-
脉冲当量
-
最大速度
-
最大加速度
-
软限位(正向/反向)
-
-
确定/取消按钮
-
参数保存到配置文件(JSON 或 XML)
3. 位置显示功能
-
使用 GDI+ 绘制位置指示器
-
显示当前位置在行程范围内的位置
-
实时更新显示
实现步骤
不管是做什么开发项目,最开始做的一定是做好框架,只有做好了条理清晰,分工明确的框架,才能在后续的开发中省去很多不必要的调试和麻烦。
正常开发中一般的框架一般分为数据模型层、业务服务层、静态资源层、通用工具类和主程序入口
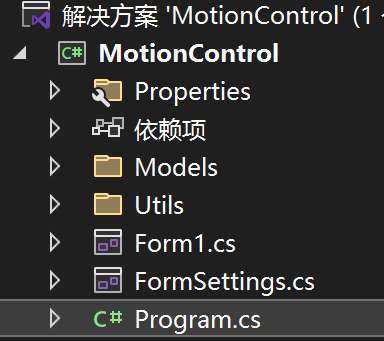
分析本项目的需求,一共分为基础界面搭建以及功能实现和完善这两个主要步骤
基础界面搭建
创建项目和主界面框架
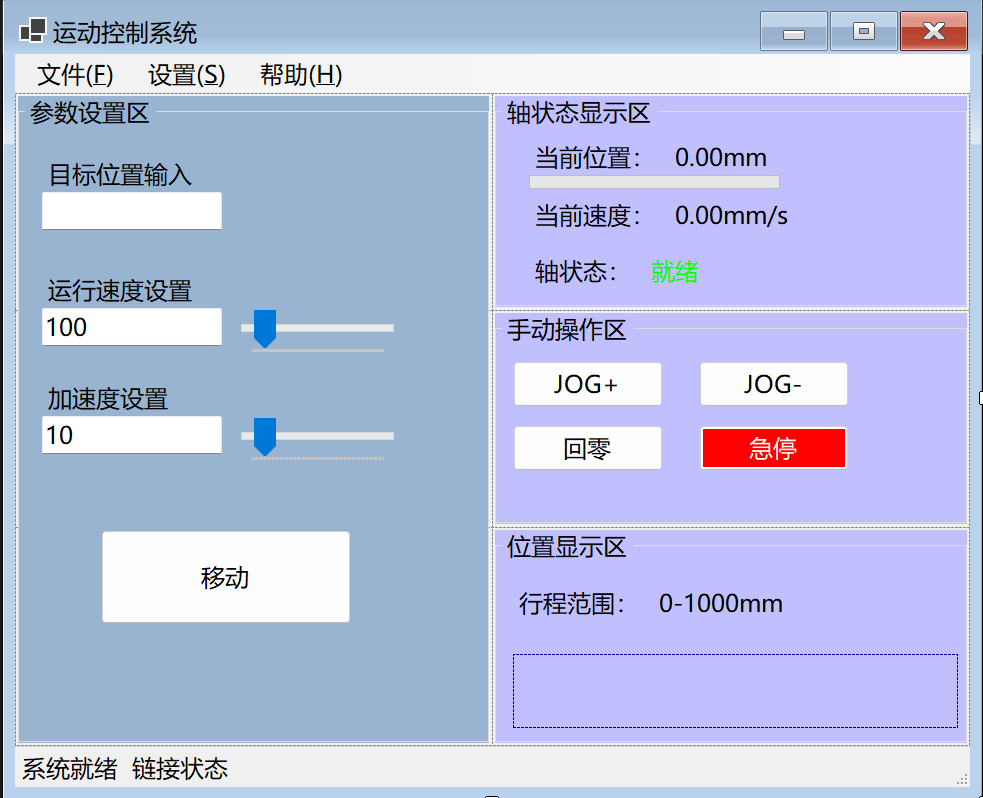
先在草稿中构建一个大致的框架,分析需求可得主界面一共有四个主要区域,分别是轴状态显示区、参数设置区、手动操作区、显示区。可用TableLayoutPanel划分主要区域,再在不同的区域中放置Panel容器进行单独的设计
功能实现和完善
主界面设置好后,下一步应该做的是创建数据模型,为什么这一步要先做呢,因为没有数据,后面具体的功能实现将寸步难行(比如条件的判断)。
创建数据模型
在Models文件夹下创建AxisState.cs类,封装轴状态的数据。
cs
namespace MotionControl.Models
{
public class AxisState
{
public double CurrentPosition { get; set; }
public double TargetPosition { get; set; }
public double CurrentSpeed { get; set; }
public double RunSpeed { get; set; }
public double Acceleration { get; set; }
public double MinPosition { get; set; }
public double MaxPosition { get; set; }
public string AxisStatus { get; set; }
public AxisState()
{
CurrentPosition = 0.0;
TargetPosition = 0.0;
CurrentSpeed = 0.0;
RunSpeed = 100.0;
Acceleration = 10.0;
AxisStatus = "就绪";
MinPosition = 0.0;
MaxPosition = 1000.0;
}
}实现手动操作功能
按下JOG+正向移动,按下JOG-负向移动,松开停止。
设置这个功能不仅仅要考虑移动的方向,还要考虑移动的速度,移动距离的限制
想控制轴体的移动方向,可以定义一个枚举,分别为正向、负向、和停止
在构造器中初始化为停止
cs
public JogDirection CurrentJogDirection { get; set; }
public enum JogDirection
{
None, // 不运动
Positive, // 正向运动
Negative // 反向运动
}设置运动方法
cs
// JOG+:正向点动开始
public void JogPositiveStart()
{
CurrentJogDirection = JogDirection.Positive;
AxisStatus = "运动中";
}
// JOG+:正向点动停止
public void JogPositiveStop()
{
CurrentJogDirection = JogDirection.None;
CurrentSpeed = 0.0;
AxisStatus = "就绪";
}
// JOG-:反向点动开始
public void JogNegativeStart()
{
CurrentJogDirection = JogDirection.Negative;
AxisStatus = "运动中";
}
// JOG-:反向点动停止
public void JogNegativeStop()
{
CurrentJogDirection = JogDirection.None;
CurrentSpeed = 0.0;
AxisStatus = "就绪";
}设置对应的事件
cs
// JOG+ 按钮按下
private void btnJogPositive_MouseDown(object sender, MouseEventArgs e)
{
axisState.JogPositiveStart();
}
// JOG+ 按钮松开
private void btnJogPositive_MouseUp(object sender, MouseEventArgs e)
{
axisState.JogPositiveStop();
}
// JOG- 按钮按下
private void btnJogNegative_MouseDown(object sender, MouseEventArgs e)
{
axisState.JogNegativeStart();
}
// JOG- 按钮松开
private void btnJogNegative_MouseUp(object sender, MouseEventArgs e)
{
axisState.JogNegativeStop();
}现在运动的方法和对应的事件都完善了,但是数据并没有更新,所有还需要写一个更新方法
在更新方法中,移动速度很好更新赋值,但是移动了多远怎么判断呢?只需用速度×时间,再每一个事件触发的时间重新更新当前位置即可。
首先在AxisState中写下更新的方法
cs
public void UpdatePosition(double deltaTime)
{
// 根据当前 JOG 方向更新位置
if (CurrentJogDirection == JogDirection.Positive)
{
// 正向运动
CurrentSpeed = RunSpeed;
double positionChange = CurrentSpeed * deltaTime;
CurrentPosition += positionChange;
// 到达限位停止
if (CurrentPosition >= MaxPosition)
{
CurrentPosition = MaxPosition;
CurrentSpeed = 0.0;
AxisStatus = "就绪";
CurrentJogDirection = JogDirection.None;
}
}
else if (CurrentJogDirection == JogDirection.Negative)
{
// 反向运动
CurrentSpeed = -RunSpeed;
double positionChange = CurrentSpeed * deltaTime;
CurrentPosition += positionChange;
// 到达限位停止
if (CurrentPosition <= MinPosition)
{
CurrentPosition = MinPosition;
CurrentSpeed = 0.0;
AxisStatus = "就绪";
CurrentJogDirection = JogDirection.None;
}
}
}方法有了,在哪调用呢,当然是主程序中了,在form1中创建对应的触发事件,设置每一毫秒更新一次数据
cs
private System.Windows.Forms.Timer timer;//事件时间触发器
public Form1()
{
InitializeComponent();
axisState = new AxisState();
timer = new System.Windows.Forms.Timer();//初始化
timer.Interval = 100;//设置时间间隔
timer.Tick += UpdateTimer_Tick;订阅更新方法
timer.Start();触发事件
}现在只需要在主程序中创建一个方法调用更新方法就行了
cs
private void UpdateTimer_Tick(object sender, EventArgs e)
{
double deltaTime = 0.1;
axisState.UpdatePosition(deltaTime);
// 1. 更新位置显示
lblPositionValue.Text = axisState.CurrentPosition.ToString("F2") + "mm";
// 2. 更新速度显示
lblSpeedValue.Text = axisState.CurrentSpeed.ToString("F2") + "mm/s";
// 3. 更新状态显示
lblStatusValue.Text = axisState.AxisStatus;
// 4. 根据状态改变颜色
if (axisState.AxisStatus == "运动中")
{
lblStatusValue.ForeColor = Color.Red;
}
else if (axisState.AxisStatus == "就绪")
{
lblStatusValue.ForeColor = Color.Lime;
}
else if (axisState.AxisStatus == "报警")
{
lblStatusValue.ForeColor = Color.Orange;
}
// 5. 更新进度条
double positionRange = axisState.MaxPosition - axisState.MinPosition;
double progress = (axisState.CurrentPosition - axisState.MinPosition) / positionRange * 100;
progressBarPosition.Value = (int)Math.Clamp(progress, 0, 100);
// 6. 更新状态栏
statusLabel.Text = "系统状态:" + axisState.AxisStatus;
panelPositionDisplay.Invalidate();
}现在只剩回零和急停按钮了,比较好实现,只需要把相关逻辑完善就行了,更新已经写好了
回零和急停
在轴数据类中写方法
cs
// 回零:回到原点
public void Home()
{
CurrentPosition = 0.0;
CurrentSpeed = 0.0;
AxisStatus = "就绪";
}
// 急停:紧急停止
public void EmergencyStop()
{
CurrentSpeed = 0.0;
AxisStatus = "就绪";
}在form1中创建事件
cs
private void btnHome_Click(object sender, EventArgs e)
{
axisState.Home();
}
private void btnEmergencyStop_Click(object sender, EventArgs e)
{
axisState.EmergencyStop();
}实现位置显示
cs
private void panelPositionDisplay_Paint(object sender, PaintEventArgs e)
{
Graphics g = e.Graphics;
// 1. 获取 Panel 的尺寸
int width = panelPositionDisplay.Width;
int height = panelPositionDisplay.Height;
// 2. 计算边距
int margin = 20;
int drawWidth = width - 2 * margin;
// 3. 绘制行程线(水平线)
int lineY = height / 2;
g.DrawLine(Pens.Black, margin, lineY, width - margin, lineY);
// 4. 绘制起点和终点标记
g.FillEllipse(Brushes.Black, margin - 5, lineY - 5, 10, 10);
g.FillEllipse(Brushes.Black, width - margin - 5, lineY - 5, 10, 10);
// 5. 绘制刻度标签
g.DrawString("0mm", SystemFonts.DefaultFont, Brushes.Black, margin, lineY - 25);
g.DrawString("1000mm", SystemFonts.DefaultFont, Brushes.Black, width - margin - 40, lineY - 25);
// 6. 计算当前位置的 X 坐标
double positionRange = axisState.MaxPosition - axisState.MinPosition;
double positionRatio = (axisState.CurrentPosition - axisState.MinPosition) / positionRange;
int currentX = margin + (int)(positionRatio * drawWidth);
// 7. 绘制位置指示器(三角形)
Point[] triangle = new Point[]
{
new Point(currentX, lineY - 15), // 顶点
new Point(currentX - 8, lineY - 5), // 左下
new Point(currentX + 8, lineY - 5) // 右下
};
g.FillPolygon(Brushes.Red, triangle);
// 8. 绘制位置标签
string positionText = axisState.CurrentPosition.ToString("F2") + "mm";
g.DrawString(positionText, SystemFonts.DefaultFont, Brushes.Red, currentX - 20, lineY + 10);
}实现菜单功能
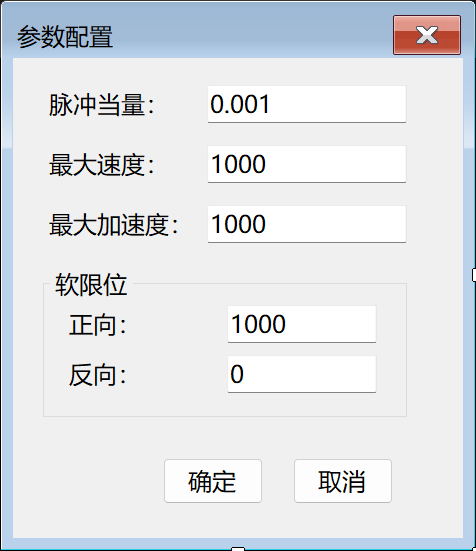
打开设置中的参数配置会打开一个小窗口,这个小窗口我们应该用模态窗口来实现,其中的数据我们应该在创建一个保存数据的类,实现多窗口之间的数据能够双向传递。
首先设置窗体框架
在models中创建数据类
cs
using System;
using System.Collections.Generic;
using System.Linq;
using System.Text;
using System.Threading.Tasks;
namespace MotionControl.Models
{
public class AxisConfig
{
public double PulseEquivalent { get; set; }
public double MaxSpeed { get; set; }
public double MaxAcceleration { get; set; }
public double SoftLimitPositive { get; set; }
public double SoftLimitNegative { get; set; }
public AxisConfig()
{
PulseEquivalent = 0.001;
MaxSpeed = 1000.0;
MaxAcceleration = 1000.0;
SoftLimitPositive = 1000.0;
SoftLimitNegative = 0.0;
}
}
}设置菜单栏的点击事件
cs
private void menuItemConfig_Click(object sender, EventArgs e)
{
FormSettings formSettings = new FormSettings(axisConfig);
DialogResult result = formSettings.ShowDialog();
if (result == DialogResult.OK)
{
// 用户点击了确定,使用修改后的配置
axisConfig = formSettings.Config;
// 应用配置到 axisState
axisState.MinPosition = axisConfig.SoftLimitNegative; // 反向限位
axisState.MaxPosition = axisConfig.SoftLimitPositive; // 正向限位
axisState.RunSpeed = axisConfig.MaxSpeed; // 最大速度
axisState.Acceleration = axisConfig.MaxAcceleration; // 最大加速度
// 更新 TrackBar 的 Maximum 属性
trackBarSpeed.Maximum = (int)axisConfig.MaxSpeed;
trackBarAccel.Maximum = (int)axisConfig.MaxAcceleration;
// 更新界面显示
trackBarSpeed.Value = (int)axisConfig.MaxSpeed;
txtSpeed.Text = axisConfig.MaxSpeed.ToString();
trackBarAccel.Value = (int)axisConfig.MaxAcceleration;
txtAccel.Text = axisConfig.MaxAcceleration.ToString();
// 更新行程范围显示
lblTravelRangeValue.Text = $"{axisConfig.SoftLimitNegative}-{axisConfig.SoftLimitPositive}mm";
MessageBox.Show("配置已保存", "提示",
MessageBoxButtons.OK, MessageBoxIcon.Information);
}
else
{
// 用户点击了取消,不使用修改
MessageBox.Show("配置未保存", "提示",
MessageBoxButtons.OK, MessageBoxIcon.Information);
}
}到此为止修改参数这一部分就完成了,只剩最后一个任务,参数保存到配置文件
参数保存到配置文件
我们可以讲数据转换为json数据类型,保存在文件夹中,方便读取和保存文件,保存时只需要把axis config中的数据转换为json形式保存就行了,读取时也只需要把数据读取出来后,让axis state提取axisconfig中的数据就行。
既然想要做到这些事,肯定就需要方法,这就是工具,我们应该将其放到utils中专门写一个转换json的代码
cs
using MotionControl.Models;
using System;
using System.Collections.Generic;
using System.Linq;
using System.Text;
using System.Text.Json;
using System.Threading.Tasks;
namespace MotionControl.Utils
{
public static class ConfigHelper
{
// 配置文件名常量
private static readonly string ConfigFileName = "axis_config.json";
/// <summary>
/// 保存轴配置到 JSON 文件
/// </summary>
/// <param name="config">要保存的配置对象</param>
public static void SaveConfig(AxisConfig config) // 定义静态方法,参数是 AxisConfig 类型
{
try
{
var options = new JsonSerializerOptions
{
WriteIndented = true, // 设置为 true,输出的 JSON 会格式化(有缩进和换行)
PropertyNamingPolicy = JsonNamingPolicy.CamelCase
};
string jsonString = JsonSerializer.Serialize(config, options);
File.WriteAllText(ConfigFileName, jsonString);
}
catch (Exception ex) // 捕获所有类型的异常,ex 是异常对象
{
// 抛出新的异常,并附加友好的错误信息
// ex.Message 获取原始异常的错误信息
throw new Exception("保存配置文件失败:" + ex.Message);
}
}
// 加载配置方法
public static AxisConfig? LoadConfig()// 返回类型是 AxisConfig?,表示可能返回 null
{
try
{
if (!File.Exists(ConfigFileName))
{
return null; // 返回 null
}
string jsonString = File.ReadAllText(ConfigFileName);
// 创建 JSON 反序列化选项对象
var options = new JsonSerializerOptions
{
PropertyNameCaseInsensitive = true // 设置为 true,属性名不区分大小写
};
// 使用 JsonSerializer.Deserialize() 将 JSON 字符串反序列化为 AxisConfig 对象
// 第一个参数是 JSON 字符串,第二个参数是反序列化选项
// <AxisConfig> 指定要反序列化成的类型
AxisConfig? config = JsonSerializer.Deserialize<AxisConfig>(jsonString, options);
// 返回反序列化得到的配置对象
return config;
}
catch (Exception ex) // 捕获所有类型的异常
{
// 抛出新的异常,并附加友好的错误信息
throw new Exception("加载配置文件失败:" + ex.Message);
}
}
}
}方法写好后,form1中添加事件去调用他就行了
cs
private void menuItemOpen_Click(object sender, EventArgs e)
{
try // 开始 try 块,捕获可能的异常
{
// 调用 ConfigHelper.LoadConfig() 加载配置
AxisConfig? loadedConfig = ConfigHelper.LoadConfig();
// 检查是否加载成功(loadedConfig 不为 null)
if (loadedConfig != null)
{
// 将加载的配置赋值给 axisConfig
axisConfig = loadedConfig;
// 应用配置到 axisState
axisState.MinPosition = axisConfig.SoftLimitNegative; // 设置最小位置
axisState.MaxPosition = axisConfig.SoftLimitPositive; // 设置最大位置
axisState.RunSpeed = axisConfig.MaxSpeed; // 设置运行速度
axisState.Acceleration = axisConfig.MaxAcceleration; // 设置加速度
// 更新 TrackBar 的 Maximum 属性(最大值)
trackBarSpeed.Maximum = (int)axisConfig.MaxSpeed; // 速度滑块的最大值
trackBarAccel.Maximum = (int)axisConfig.MaxAcceleration; // 加速度滑块的最大值
// 更新界面显示
trackBarSpeed.Value = (int)axisConfig.MaxSpeed; // 设置速度滑块的值
txtSpeed.Text = axisConfig.MaxSpeed.ToString(); // 设置速度文本框的值
trackBarAccel.Value = (int)axisConfig.MaxAcceleration; // 设置加速度滑块的值
txtAccel.Text = axisConfig.MaxAcceleration.ToString(); // 设置加速度文本框的值
// 更新行程范围显示
lblTravelRangeValue.Text = $"{axisConfig.SoftLimitNegative}-{axisConfig.SoftLimitPositive}mm"
;
// 弹出提示框,告诉用户加载成功
MessageBox.Show("配置加载成功!", "提示",
MessageBoxButtons.OK, MessageBoxIcon.Information);
}
else
{
// 如果 loadedConfig 是 null,说明文件不存在
MessageBox.Show("未找到配置文件", "提示",
MessageBoxButtons.OK, MessageBoxIcon.Information);
}
}
catch (Exception ex) // 捕获所有异常
{
// 弹出错误提示框,显示错误信息
MessageBox.Show(ex.Message, "错误",
MessageBoxButtons.OK, MessageBoxIcon.Error);
}
}
private void menuItemSave_Click(object sender, EventArgs e)
{
try // 开始 try 块,捕获可能的异常
{
// 调用 ConfigHelper.SaveConfig() 保存配置
ConfigHelper.SaveConfig(axisConfig);
// 弹出提示框,告诉用户保存成功
MessageBox.Show("配置保存成功!", "提示",
MessageBoxButtons.OK, MessageBoxIcon.Information);
}
catch (Exception ex) // 捕获所有异常
{
// 弹出错误提示框,显示错误信息
MessageBox.Show(ex.Message, "错误",
MessageBoxButtons.OK, MessageBoxIcon.Error);
}
}到此位置,本项目圆满完成