1、B*树是什么?
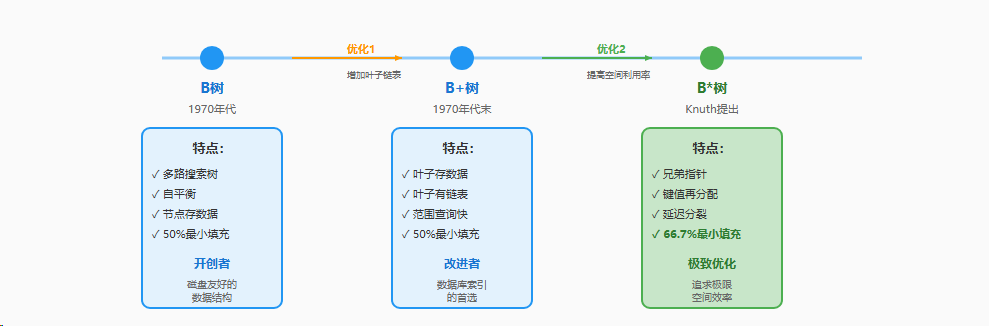
B*树(B-star Tree) 是B+树的一个优化变种,由计算机科学家Donald Knuth 提出。它的核心目标是:在保持B+树优良特性的同时,进一步提高空间利用率。
B*树 = B+树 + 兄弟节点再分配 + 2/3最小填充度
它通过让相邻兄弟节点"互相帮忙",推迟节点分裂的时机,从而让每个节点都更"满"。
从B树到B*树的演进历程
2、为什么需要B*树?
B树和B+树虽然优秀,但存在一个显著的问题:空间利用率不够高。
那么B*树是怎么解决这个问题的?
3、B*树解决的核心需求
1️⃣ 减少磁盘I/O(最重要)
- 问题:磁盘I/O是数据库性能的主要瓶颈,比内存操作慢10万倍
- 解决:更高的空间利用率意味着相同数据需要更少的节点,从而减少磁盘读写次数
- 效果:节省约25-30%的磁盘访问次数
2️⃣ 降低树高
- 问题:每增加一层树高,就多一次磁盘I/O
- 解决:节点更"满"意味着树更"矮胖",查找路径更短
- 效果:存储相同数据量,树高可降低10-15%
3️⃣ 节省存储空间
- 问题:数据库规模动辄TB级,空间浪费代价高昂
- 解决:66.7%的最小填充率 vs 50%
- 效果:节省约25%的存储空间
4️⃣ 提高缓存命中率
- 问题:内存有限,不能缓存所有节点
- 解决:更少的节点意味着热点数据更容易被缓存
- 效果:缓存命中率提升20-30%
4、B*树的核心特性
B*树几乎总是 B+树 的一种变体,而不是经典B树的变体。
这意味着B*树继承了B+树所有关键的结构特性,然后在其上增加了更严格的填充规则。
4.1、核心特性
以下是B*树的核心结构特性总结:
- 根节点 : 和B/B+树一样,如果根节点不是叶子,它必须至少有 2 个子节点。
- 内部节点 : 非根的内部节点(索引节点)只存储键和指针。这是B*树的定义性规则 :它必须有
⌈2m/3⌉到m个子节点(B/B+树是⌈m/2⌉)。 - 叶子节点 :
- 结构: 继承B+树特性,所有叶子节点都在同一层,并且通过 双向链表 连接以支持高效的范围查询。
- 内容: 存储
(键, 数据)对。所有真实数据都只存在于叶子节点。 - 填充率: 填充率也必须满足
⌈2m/3⌉的下限。
- 对兄弟节点的依赖 (关键): B树的所有核心操作(旋转、2-3分裂、3-2合并)都严重依赖于与兄弟节点的交互。因此,在B 树的 具体实现 中,非叶节点通常会包含一个直接的兄弟指针,以避免每次都通过父节点查找的开销。
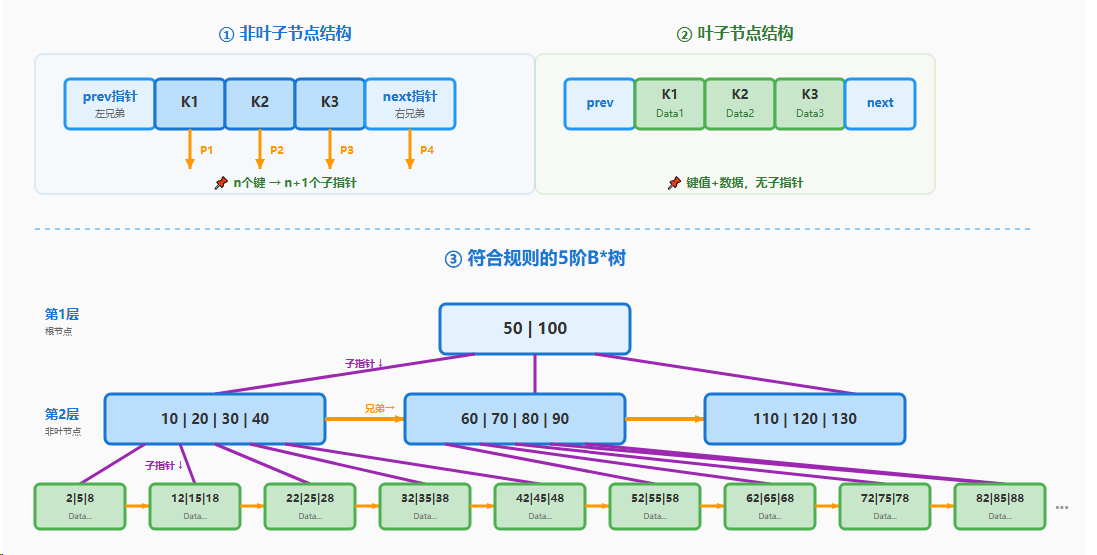
① 子指针
• 作用:连接父节点和子节点
• 方向:自上而下
• 特点:n个键 → n+1个子指针
② 兄弟指针
• 作用:实现再分配,推迟分裂
• 方向:水平横向
• 特点:双向链表,每层都有
③ 数据指针
• 作用:叶子节点存储实际数据
• 位置:仅在叶子节点
• 特点:键值对应数据记录
4.2、关键规则:2/3 填充率
为什么选择66.7%,2/3这个数字,这个 2/3 不是一个随意选择的数字,它是 B树 核心分裂策略 的 必然数学结果。B树的设计哲学是"延迟分裂":当一个节点满了,它不像B树那样立即"1-2分裂",而是尝试"2-3分裂"。
B*树规定,当一个节点(我们称之为 A)满了,它会拉上它旁边的兄弟节点(B)一起分裂。这个兄弟节点(B)此时也必须是满的(或者接近满的)。
这个策略被称为 "2-3分裂",它的数学原理如下:
- B树(1-2分裂):
1个满节点(含新键)分裂成2个新节点。每个新节点大约1/2满。所以B树的下限是1/2。 - B*树(2-3分裂):
2个满节点(加上父节点的1个分隔键和1个新键)合并后,重新分裂成3个新节点。
让我们来看一下"2-3分裂"的数学细节(这里以键的数量为例):
- 我们有 2个满节点 。一个满节点有
m-1个键。总共2 * (m-1)个键。 - 我们从父节点"借"来 1个分隔键。
- 我们还要插入 1个新键。
- 总键池 =
(m-1) + (m-1) + 1 (父键) + 1 (新键) = 2m个键。(注:为简化计算,我们假设合并了__2m_个键)。 - 这
2m个键将被重新分配到 3个新节点 中。为了分隔这3个节点,需要 2个新键 提升到父节点。 - 分配给3个新节点的键数 =
2m - 2个键。 - 每个新节点平均获得的键数 =
(2m - 2) / 3 ≈ 2m/3。
一个更精确的计算:(2个满节点+1个父键) 2m-1 个键,分裂为3个节点和2个新父键。留给3个节点的键数为 (2m-1)-2 = 2m-3。每个节点 (2m-3)/3 = (2m/3) - 1 个键。_
结论: 无论哪种计算方式,"2-3分裂"策略产生的新节点,其键数都约等于 2m/3。为了让这种分裂策略始终可行 (即分裂后的新节点不能立即"下溢"),B*树必须保证任何一个节点(即使是删除后)的键数永远不能低于这个值。
因此,(2m/3) - 1 (或 ceil(2m/3) 个指针)就成了B*树的"最小填充率"下限。不是我们选择了 2/3,而是"2-3分裂"这个策略决定了下限必须是 2/3。
这个设计反过来又加强了B*树的特性:
- B树(1-2分裂): 分裂后节点约
m/2满。 - B*树(2-3分裂): 分裂后节点约
2m/3满。
如果B*树也用B树的"1-2分裂",分裂后的 m/2 满的节点将不满足 2m/3 的最小要求(因为 m/2 < 2m/3。
B*树的策略是:当一个节点满了,它不会立即分裂,而是先尝试和兄弟"旋转"共享。只有当兄弟也满了,才会触发"2-3分裂"。
5、分裂策略:1-2和2-3
在深入研究B树的具体插入/删除操作之前,我们必须先彻底理解它与B/B+树在"分裂"这一核心操作上的巨大差异。这个差异是B树所有设计(包括2/3填充率)的根源。
5.1、B/B+树1-2分裂
当一个节点(m阶,最多m-1个键)满了之后,再插入一个新键时:
- 合并键池: 将
(m-1)个旧键 和1个新键 合并,总共m个键。 - 找到中位数: 从
m个键中找到中位数k。 - 分裂:
- 中位数
k提升 到父节点。 - 小于
k的键(约m/2 - 1个)放入左侧新节点。 - 大于
k的键(约m/2个)放入右侧新节点。
- 中位数
- 结果: 1个满节点分裂成2个半满(~50%)的节点。
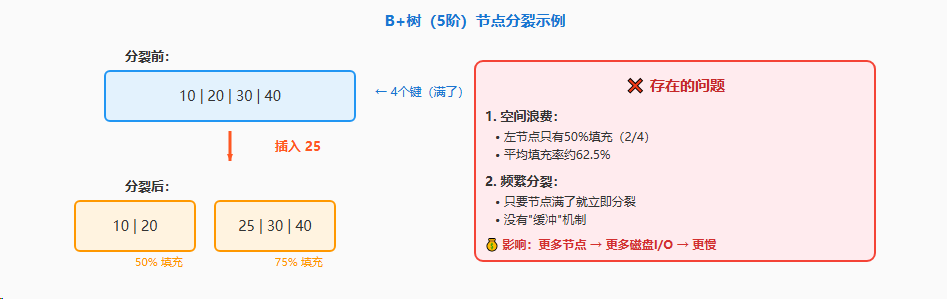
以5阶B树为例:

B+树简单分裂的问题:
问题1:分裂后左节点只有2个键,低于B*树要求的3个键(66.7%填充)
问题2:频繁分裂导致大量节点处于半满状态,浪费空间
问题3:树高增长快,磁盘I/O次数多
B*树解决方案:通过1-2分裂和2-3分裂推迟分裂,提高空间利用率
5.2、B*树1-2分裂
先来看下如果B*树也使用1-2分裂有什么问题?

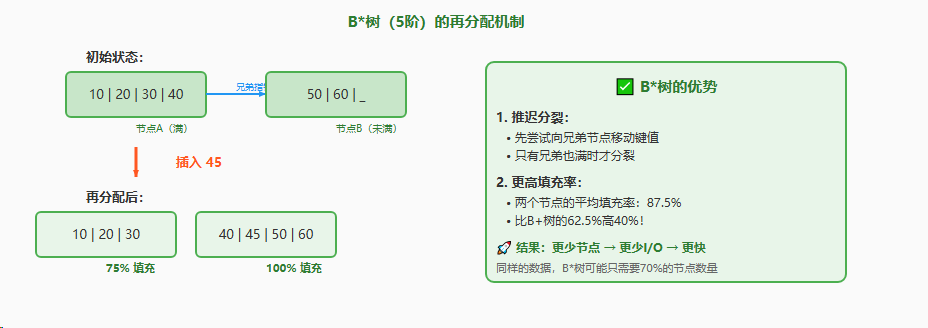
核心思想:当一个节点满时,不立即分裂,而是通过兄弟指针将部分键值"借给"相邻的兄弟节点。
前提条件:兄弟节点未满(有空间接收键值)
这种1-2分裂的优劣势:
优势分析
✓ 避免分裂:没有创建新节点,节省空间
✓ 高填充度:两节点都是4键(100%),未来还能继续插入
✓ 低树高:推迟分裂→树高增长慢→减少I/O
✓ 高效率:只需移动键值和更新父节点分隔键
代价与限制
⚠ 前提条件:兄弟节点必须未满
⚠ 额外开销:需要移动键值(O(m)复杂度)
⚠ 适用场景:插入较分散时效果最好
✗ 不适用:兄弟也满时,需要2-3分裂
接下来再看下2-3分裂。
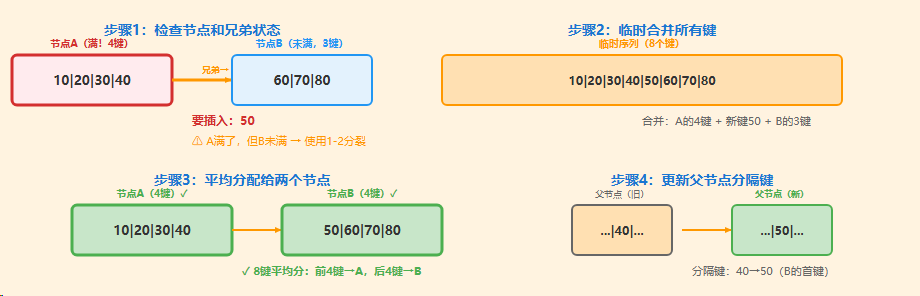
5.3、B*树2-3分裂
这是B*树的核心。当一个节点A满了,它会拉上它的兄弟节点B(此时B也必须是满的),执行"2-3分裂":
- 合并键池:
- 节点A的
(m-1)个键 - 节点B的
(m-1)个键 - 要插入的
1个新键
- 节点A的
- 总键数 =
(m-1) + (m-1) + 1 = 2m-1个键。(这是一个理想化的近似值,便于理解) - 找到分隔键: 从
2m-1个键中找到 2个 分隔键k1和k2。 - 分裂:
k1和k2提升 到父节点(替换掉旧的k_parent)。- 小于
k1的键(约2m/3个)放入新节点1。 - 大于
k1小于k2的键(约2m/3个)放入新节点2。 - 大于
k2的键(约2m/3个)放入新节点3。
- 结果: 2个满节点分裂成3个约 2/3 满的节点。
触发条件:节点满了,且所有相邻兄弟节点也都满了,无法再分配。
核心思想:将2个满节点的键值重新分配给3个节点,保证每个节点都有更高的填充度。
是否需要父节点分隔键?
叶子节点:不需要父节点分隔键(叶子节点已包含所有键)
非叶子节点:需要父节点分隔键下移参与合并(标准B树操作)
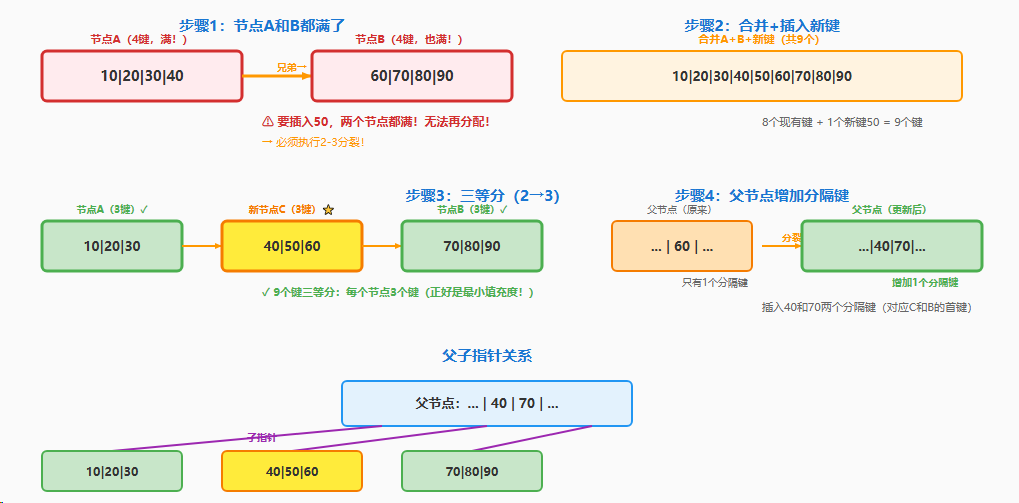
B*树:2个满节点 → 3个节点
• 9个键 → 3键 + 3键 + 3键(各75%,有插入空间)
• 优势:每个节点都有插入空间
5.4、是否需要父节点分隔键?
是B*树分裂中非常重要但容易混淆的细节。答案取决于节点类型:
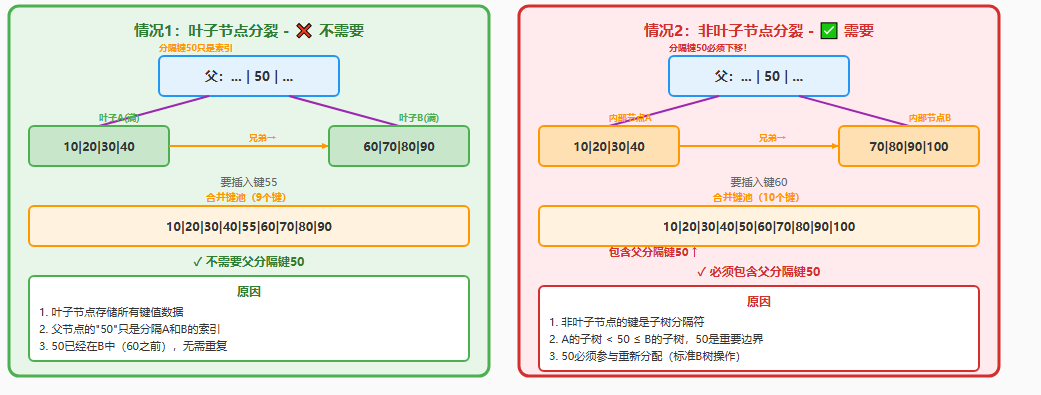
叶子节点(❌ 不需要父分隔键)
节点内容
• 存储实际的键值对数据
• 例:10:Data10, 20:Data20, ...
父分隔键的作用
• 仅用于查找路由(索引)
• 例:父节点"50"表示"≥50去右边"
• 50本身的数据已在叶子B中合并示例
• A: 10,20,30,40 + B: 60,70,80,90
• 插入55 → 10,...,40,55,60,...,90
• ✓ 9个键,三等分为3+3+3
• ✗ 如果加父50会变10个键(错误!)
非叶子节点(✅ 需要父分隔键)
节点内容
• 存储分隔键+子指针
• 例:10, 20, 30, 40 + 5个子指针
父分隔键的作用
• 是子树之间的真实边界
• 例:父节点"50"表示A的值<50≤B的值
• 50必须参与分配以保持树的正确性合并示例(标准B树操作)
• A: 10,20,30,40 + 父分隔50+ B: 70,80,90,100 + 新键60
• ✓ 10个键,三等分为3+3+4或3+4+3
• ✗ 如果不加父50会丢失边界(错误!)
总结:
- 叶子节点:"我已经有所有数据了,父亲的分隔键只是路标,我不需要"
- 非叶子节点:"父亲的分隔键是我和兄弟的边界,必须拿下来一起分配"
类比:就像图书馆的索引卡片(父分隔键)和真实书籍(叶子数据)。重新整理书架时,索引卡片要参与重组(非叶子),但真实书籍本身已经完整,不需要额外的索引卡片(叶子)。
6、再分配机制详解
再分配,也常被称为"旋转",是B树提高空间利用率的 第一道防线 。无论是在插入还是删除时,B树都会优先尝试此操作,以避免昂贵的"分裂"或"合并"操作。
核心思想就是看兄弟节点满没满:
- 兄弟结点未满的情况 :
- 当一个结点满时,检查其相邻的兄弟结点是否未满
- 如果兄弟结点未满,将一部分数据从当前结点移到兄弟结点中
- 在原结点中插入新关键字
- 修改父结点中兄弟结点的关键字(因为兄弟结点的关键字范围改变了)
- 无需分配新结点
- 兄弟结点也满的情况 :
- 如果兄弟结点也满了,则在原结点与兄弟结点之间增加一个新结点
- 将原结点和兄弟结点的数据各复制1/3到新结点
- 在父结点中增加新结点的指针
- 分配新节点
这里可能有个疑问,又是合并又是移动的到底是哪个?再分配是把两个节点的键"合并"起来重新平分,还是仅仅"移动"几个键过去?
- 概念模型 (为了理解): 将两个兄弟节点(A和B)视为一个"微型键池"并重新平分,这是理解再分配目标的最清晰方式。它能帮我们理解为什么父键会变,为什么两个节点会重新平衡。我们后续图表中的"处理过程"框图使用的是这个模型。
- 高效实现 (为了性能): 在实际编程中,我们几乎总是使用"移动/滑动/交换"的方式。因为重新构建两个完整的节点(磁盘块)开销很大。B*树的高效正体现在它用廉价的"移动"操作来避免昂贵的"分裂"操作。
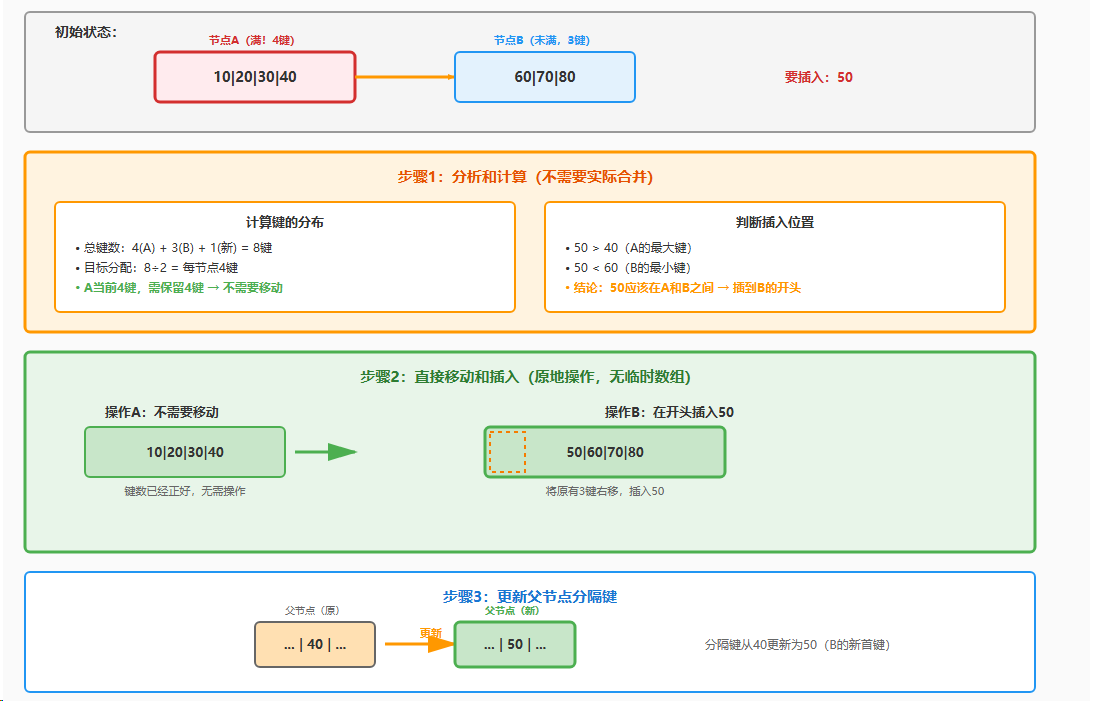
示例:插入50到节点A(A满4键,B有3键)
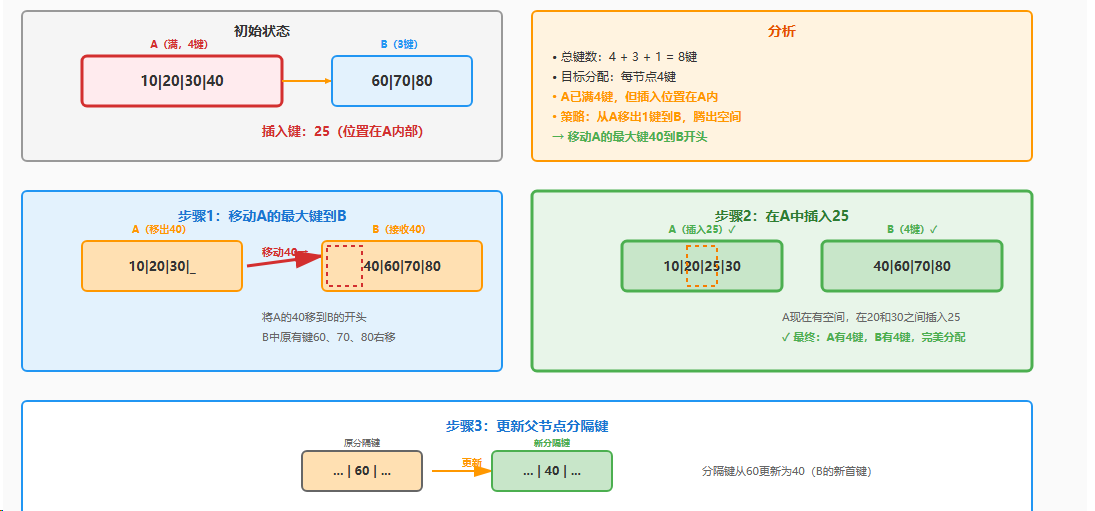
示例2:插入25到节点A(需要从A移动键到B)
7、插入操作
插入是B*树最复杂的操作,也是与B+树的最大区别。关键在于再分配机制。
插入流程:
- 找到叶子节点L
- 若L未满→直接插入
- 若L满→检查兄弟是否未满→再分配
- 若兄弟也满→分裂
插入主要有以下三种场景:
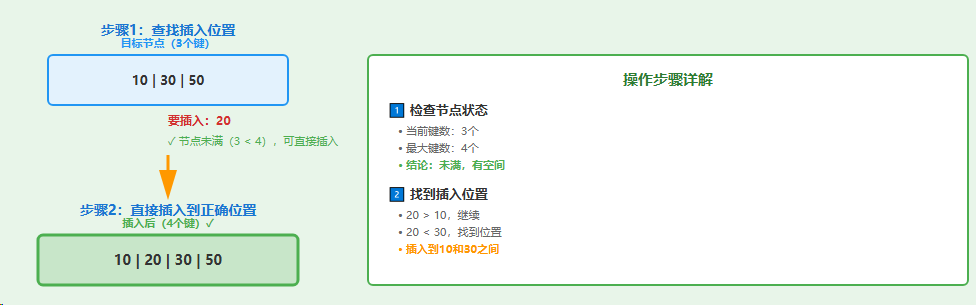
7.1、场景1:节点未满-直接插入
这是最理想的情况。我们B*树是基于B+树的,所以插入操作会递归地找到正确的叶子节点,如果该叶子节点未满(键数 < m-1),则直接将 (键, 数据) 插入到该叶子节点,并保持键的有序性。
7.2、场景2:节点满了,但兄弟节点未满
这是B*树的 第一道防线 。当节点A(叶子或内部节点)满了,它不会立刻分裂。它会检查其 紧邻的兄弟节点(左或右)。
如果兄弟节点B 有空间 (键数 < m-1),B*树会执行"再分配"操作:将节点A、节点B、新键,三者合并,然后重新计算一个新分隔键K',并将键值在A和B之间重新平均分配。
✨ 1-2分裂的核心优势
✓ 推迟分裂:没有创建新节点,节省空间和时间
✓ 高填充度:A和B都是4键(100%填充),比B+树更紧凑
✓ 树高更低:减少分裂次数 → 树高增长慢 → 查询层次少
⚠ 前提条件:兄弟节点必须有空间(未满)
⚠ 时间复杂度:O(m),需要移动键值
✗ 不适用:当兄弟也满时,必须使用2-3分裂
7.3、场景3:节点满了,兄弟节点也满了
这是B*树的 最后一道防线。如果节点A满了,它尝试合入兄弟节点,但发现兄弟节点B也满了,则无法进行。必须进行2-3分裂

8、删除操作
B*树的删除操作是插入操作的完美逆过程。它同样遵循"优先再分配"的原则,以避免不必要的节点合并。
删除主要流程:
- 找到键所在的叶子节点L
- 删除键值对
- 若删除后L仍满足最小填充度→完成
- 若L下溢→从兄弟借键或合并节点
与插入操作类似,删除操作也有三种主要场景,取决于删除后节点的键数是否满足最小要求.
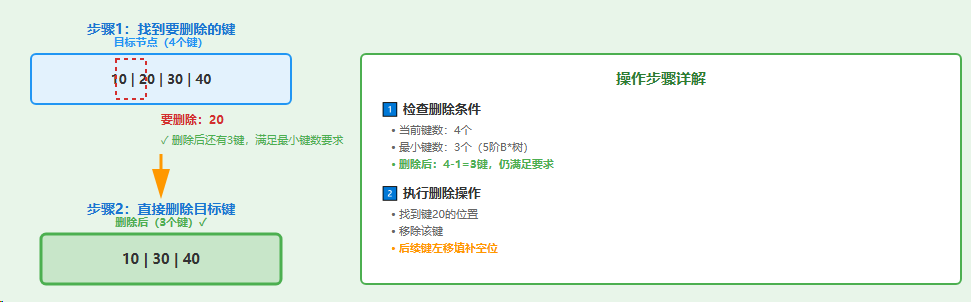
8.1、场景1:节点未下溢
同样,这是最理想的情况。我们从叶子节点中删除 (键, 数据) 对。如果删除后,该节点的键数仍然 大于或等于 最小填充率要求(即键数 ≥ ceil(2m/3) - 1),则操作直接完成。什么也不用做。
5阶B*树,最小3个键
8.2、场景2:节点下溢,向兄弟借
这是B*树在删除时的 第一道防线 。当节点A(叶子或内部节点)因为删除而"下溢"(键数 < ceil(2m/3) - 1),它会检查其 紧邻的兄弟节点B。
如果兄弟节点B 有多余的键 (键数 > ceil(2m/3) - 1),B*树会执行"再分配"操作。
- 从右兄弟借:右兄弟最小键→父节点→当前节点
- 从左兄弟借:左兄弟最大键→父节点→当前节点
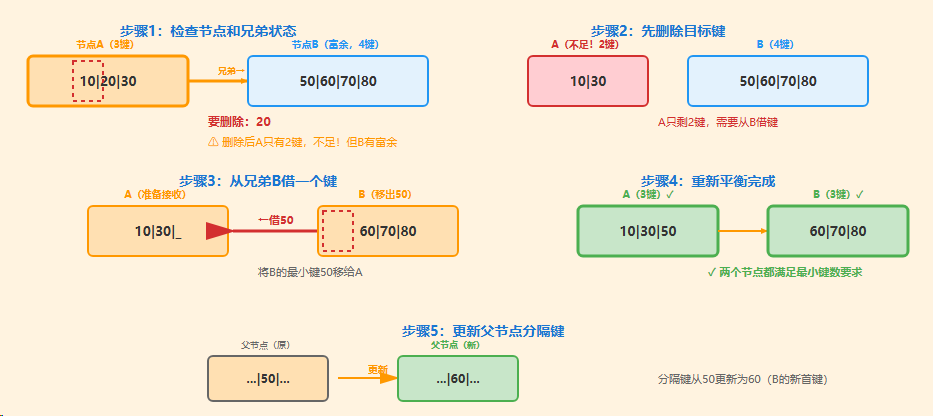
借键的核心优势
✓ 避免合并:没有删除节点,保持树的结构
✓ 保持平衡:两节点都满足最小键数,分布均匀
8.3、场景3:节点下溢,兄弟也无法借
这是B*树的 最后一道防线 。如果节点A下溢了,它尝试旋转,但发现兄弟节点B也 刚好处于最小填充率(没有多余的键可以借)。
此时,B*树不再执行B树的"2-1合并"(两个节点合并成一个),而是执行 "3-2合并" 。它会拉上节点A、兄弟节点B、以及另一个兄弟节点C(或者A和B两个兄弟),连同它们在父节点的 分隔键 (如果是非叶子节点),一起合并,重组为 2个 新的节点。
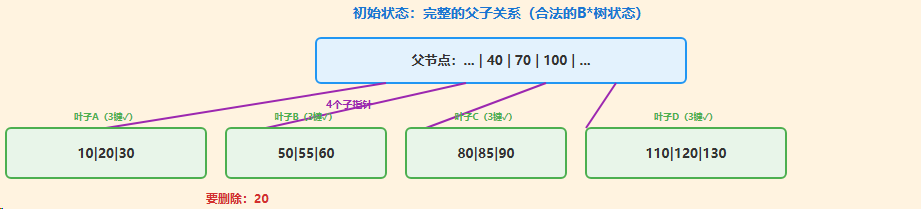
删除后的情况分析
• A删除20后:2键(10、30) → 不满足最小3键要求
• 左兄弟不存在
• 右兄弟B:3键(50、55、60) → 最小值,无法借(借后B只剩2键)
✓ 解决方案:使用B*树的3-2合并!将A、B、C三个节点重新分配成2个节点
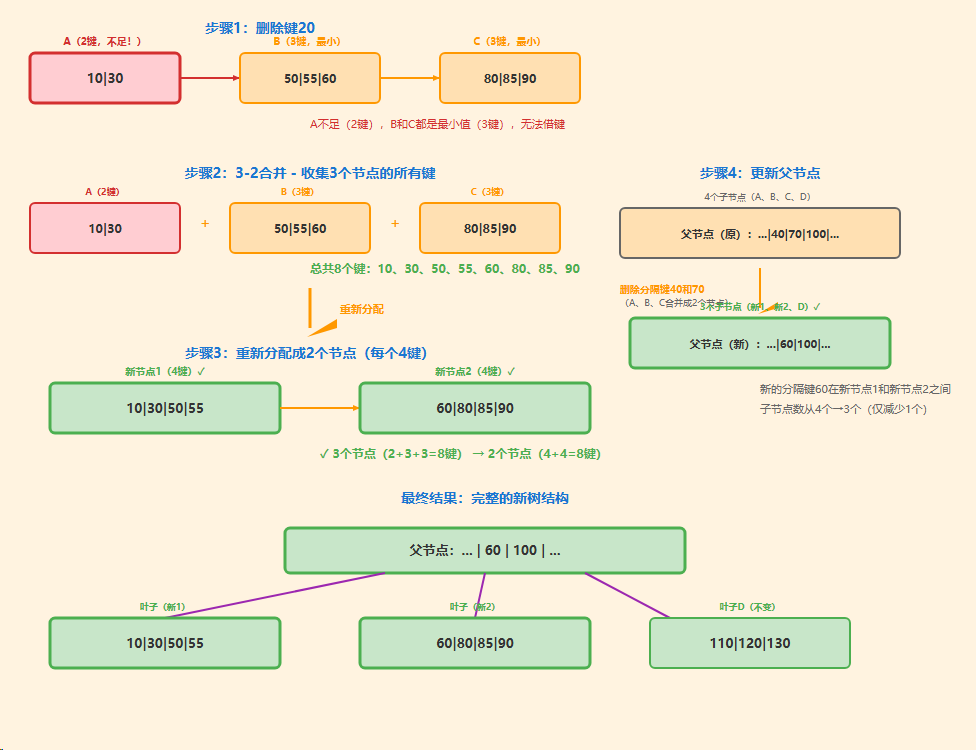
3-2合并的核心要点
- 触发条件:删除后节点不足(2键),相邻2个兄弟节点都是最小键数(3键)
- 操作核心 :3-2合并 - 将3个节点(2+3+3=8键)重新分配成2个节点(4+4=8键)
- B*树优势:与标准B树的2-1合并不同,3-2合并减少的节点更少,推迟递归传播
- 叶子节点合并:❌ 不需要父分隔键参与(父分隔键只是索引)
- 非叶子节点合并:✅ 需要父分隔键下移参与合并(标准B树操作)
- 父节点变化:删除2个旧分隔键,新增1个分隔键,子指针数量-1(从4→3)
- 递归风险:父节点子节点数减少,可能也不足,需要向上递归处理
- 最坏情况:递归到根节点,可能导致树高度-1
| 对比维度 | 2-1合并(标准) | 3-2合并(B*树优化)⭐ |
|---|---|---|
| 节点数量 | 2个节点 → 1个节点 | 3个节点 → 2个节点 |
| 父节点影响 | 删除1个分隔键 | 删除1个分隔键 |
| 递归风险 | 较高(直接合并) | 较低(重新分配,推迟递归) |
| 填充率 | 可能较高(1个节点) | 均衡(2个节点平分) |
| 实现复杂度 | 简单 | 复杂(需处理3个节点) |
| 使用场景 | 标准B树、简单实现 | B*树优化、高性能要求 |
9、性能分析
B*树的"写"性能(插入/删除)是其最复杂的地方,必须区分"单次操作"和"摊销成本"。
核心权衡点:以"更贵的旋转"换取"更少的分裂"
单次操作开销对比
- 简单操作 (节点未满/未下溢): B*树与B+树相同,都只需要1次I/O(读取并写回该节点)。
- 旋转 (B*树优先):
- B*树的旋转 (如前文所示)通常涉及 3个节点(当前节点A、兄弟节点B、父节点P)的读写。这是一次相对昂贵的操作。
- B+树在对应场景下(节点满)会直接执行"1-2分裂"。
- 分裂/合并 (最后手段):
- B+树 (1-2分裂 / 2-1合并): 涉及父节点、当前节点、新兄弟节点。大约需要 3-4 个节点的I/O。
- B*树 (2-3分裂 / 3-2合并): 涉及父节点、当前节点、一个兄弟、一个新兄弟(或两个兄弟)。大约需要 5-6 个节点的I/O。
结论: B树的"旋转"操作比B+树的"分裂"更便宜,但B 树的"分裂/合并"操作(2-3 / 3-2)比B+树的"分裂/合并"操作(1-2 / 2-1)昂贵得多。
摊销成本:B*树的真正优势
B*树的设计目标是**降低摊销成本(**即长序列操作的平均成本)。
它的逻辑是:
- 在B+树中,每次节点满(溢出)都必须执行"分裂"。
- 在B*树中,绝大多数的"溢出"或"下溢"都被"旋转"操作(相对便宜)给"吸收"了。
- 只有在极少数情况下(兄弟节点也都满了/都处于下限),B*树才不得不执行它那套非常昂贵(但罕见)的"2-3分裂"或"3-2合并"。
因此,B树的写性能曲线更"平滑"。它用"始终偏高"的平均写成本(因为旋转很常见),换取了"极低概率"的峰值写成本(罕见的分裂)。对于一个长期运行的系统,B 树的总体I/O次数更少,性能更稳定。
10、B树家族详细对比
| 特性 | B 树 | B+ 树 | *B 树 (B+树变体)** |
|---|---|---|---|
| 数据存储 | 键和数据都存储在内部节点和叶子节点 | 数据只存储在叶子节点 | 数据只存储在叶子节点 |
| 内部节点 | (键, 数据, 指针) | (键, 指针) (只作索引) | (键, 指针) (只作索引) |
| 叶子节点链表 | 无 | 有 (双向链表,支持范围查询) | 有 (B+树特性) |
| 最小填充率 | ~50% (ceil(m/2) ) |
~50% (ceil(m/2) ) |
~66.7% (ceil(2m/3))** |
| 插入溢出策略 | 1-2 分裂 (立即分裂) | 1-2 分裂 (立即分裂) | 1. 旋转(优先) 2. 2-3 分裂 (次之) |
| 删除下溢策略 | 1. 旋转 (优先) 2. 2-1 合并 (次之) | 1. 旋转 (优先) 2. 2-1 合并 (次之) | 1. 旋转 (优先) 2. 3-2 合并 (次之) |
| 空间利用率 | 中 (平均 ~69%) | 中 (平均 ~69%) | 高 (平均 ~85%) |
| 实现复杂度 | 中 | 中 | 高 |
11、Python实现
python
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
class BStarNode:
"""B*树节点类"""
def __init__(self, is_leaf=False):
self.keys = [] # 关键字列表
self.children = [] # 子节点指针列表
self.is_leaf = is_leaf # 是否为叶子节点
self.next = None # 右兄弟指针
self.prev = None # 左兄弟指针
self.parent = None # 父节点指针
self.data = [] # 数据列表(仅叶子节点)
def __repr__(self):
return f"Node(keys={self.keys}, is_leaf={self.is_leaf})"
class BStarTree:
"""B*树类"""
def __init__(self, order=5):
"""
初始化B*树
Args:
order: 树的阶数(最多有order个子节点)
"""
self.order = order
self.max_keys = order - 1
self.min_keys = (2 * order) // 3 - 1 # 最小键数:⌈2m/3⌉-1
self.root = BStarNode(is_leaf=True)
def search(self, key):
"""
查找键值
Args:
key: 要查找的键
Returns:
找到返回对应的数据,否则返回None
"""
return self._search_recursive(self.root, key)
def _search_recursive(self, node, key):
"""递归查找"""
# 在当前节点中二分查找
i = self._binary_search(node.keys, key)
# 如果是叶子节点
if node.is_leaf:
if i < len(node.keys) and node.keys[i] == key:
return node.data[i]
return None
# 如果是非叶子节点,继续向下
if i < len(node.keys) and node.keys[i] == key:
i += 1 # B+树特性:继续向右子树
return self._search_recursive(node.children[i], key)
def _binary_search(self, keys, key):
"""二分查找,返回插入位置"""
left, right = 0, len(keys)
while left < right:
mid = (left + right) // 2
if keys[mid] < key:
left = mid + 1
else:
right = mid
return left
def insert(self, key, data):
"""
插入键值对
Args:
key: 键
data: 数据
"""
# 如果根节点满了,需要分裂根节点
if len(self.root.keys) >= self.max_keys:
old_root = self.root
self.root = BStarNode(is_leaf=False)
self.root.children.append(old_root)
old_root.parent = self.root
self._split_child(self.root, 0)
# 插入到叶子节点
self._insert_non_full(self.root, key, data)
def _insert_non_full(self, node, key, data):
"""向非满节点插入"""
if node.is_leaf:
# 找到插入位置
i = self._binary_search(node.keys, key)
node.keys.insert(i, key)
node.data.insert(i, data)
else:
# 找到应该插入的子节点
i = self._binary_search(node.keys, key)
# 如果子节点满了
if len(node.children[i].keys) >= self.max_keys:
# 尝试再分配或分裂
self._handle_full_child(node, i, key, data)
else:
self._insert_non_full(node.children[i], key, data)
def _handle_full_child(self, parent, child_idx, key, data):
"""处理满的子节点:尝试再分配或分裂"""
child = parent.children[child_idx]
# 尝试向右兄弟再分配
if child.next and len(child.next.keys) < self.max_keys:
self._redistribute_to_right(parent, child_idx)
self._insert_non_full(parent, key, data)
# 尝试向左兄弟再分配
elif child.prev and len(child.prev.keys) < self.max_keys:
self._redistribute_to_left(parent, child_idx)
self._insert_non_full(parent, key, data)
# 必须分裂
else:
self._split_child(parent, child_idx)
self._insert_non_full(parent, key, data)
def _redistribute_to_right(self, parent, child_idx):
"""向右兄弟再分配"""
child = parent.children[child_idx]
right_sibling = child.next
if child.is_leaf:
# 移动child的最后一个键到right_sibling的开头
key = child.keys.pop()
data = child.data.pop()
right_sibling.keys.insert(0, key)
right_sibling.data.insert(0, data)
# 更新父节点的分隔键
parent.keys[child_idx] = right_sibling.keys[0]
else:
# 非叶节点的再分配稍复杂
# 这里简化处理
pass
def _redistribute_to_left(self, parent, child_idx):
"""向左兄弟再分配"""
child = parent.children[child_idx]
left_sibling = child.prev
if child.is_leaf:
# 移动child的第一个键到left_sibling的末尾
key = child.keys.pop(0)
data = child.data.pop(0)
left_sibling.keys.append(key)
left_sibling.data.append(data)
# 更新父节点的分隔键
parent.keys[child_idx - 1] = child.keys[0]
else:
pass
def _split_child(self, parent, child_idx):
"""分裂子节点(1分2)"""
child = parent.children[child_idx]
mid = len(child.keys) // 2
# 创建新节点
new_node = BStarNode(is_leaf=child.is_leaf)
# 分割键
new_node.keys = child.keys[mid+1:]
child.keys = child.keys[:mid]
if child.is_leaf:
# 分割数据
new_node.data = child.data[mid+1:]
child.data = child.data[:mid]
# 维护叶子链表
new_node.next = child.next
if child.next:
child.next.prev = new_node
child.next = new_node
new_node.prev = child
else:
# 分割子节点
new_node.children = child.children[mid+1:]
child.children = child.children[:mid+1]
for c in new_node.children:
c.parent = new_node
# 中间键上提到父节点
promote_key = child.keys[mid] if not child.is_leaf else new_node.keys[0]
parent.keys.insert(child_idx, promote_key)
parent.children.insert(child_idx + 1, new_node)
new_node.parent = parent
# 维护兄弟指针
new_node.next = child.next
new_node.prev = child
if child.next:
child.next.prev = new_node
child.next = new_node
def delete(self, key):
"""删除键值"""
self._delete_recursive(self.root, key)
# 如果根节点为空,调整树高
if not self.root.is_leaf and len(self.root.keys) == 0:
if self.root.children:
self.root = self.root.children[0]
self.root.parent = None
def _delete_recursive(self, node, key):
"""递归删除"""
if node.is_leaf:
if key in node.keys:
idx = node.keys.index(key)
node.keys.pop(idx)
node.data.pop(idx)
# 检查是否需要再平衡
if len(node.keys) < self.min_keys and node.parent:
self._rebalance_after_deletion(node)
else:
i = self._binary_search(node.keys, key)
if i < len(node.keys) and node.keys[i] == key:
i += 1
self._delete_recursive(node.children[i], key)
def _rebalance_after_deletion(self, node):
"""删除后再平衡"""
# 尝试从兄弟借键
if node.next and len(node.next.keys) > self.min_keys:
self._borrow_from_right_sibling(node)
elif node.prev and len(node.prev.keys) > self.min_keys:
self._borrow_from_left_sibling(node)
else:
# 需要合并
self._merge_with_sibling(node)
def _borrow_from_right_sibling(self, node):
"""从右兄弟借键"""
right = node.next
node.keys.append(right.keys.pop(0))
node.data.append(right.data.pop(0))
def _borrow_from_left_sibling(self, node):
"""从左兄弟借键"""
left = node.prev
node.keys.insert(0, left.keys.pop())
node.data.insert(0, left.data.pop())
def _merge_with_sibling(self, node):
"""与兄弟合并"""
# 简化实现:与右兄弟合并
if node.next:
right = node.next
node.keys.extend(right.keys)
node.data.extend(right.data)
node.next = right.next
if right.next:
right.next.prev = node
def range_query(self, start_key, end_key):
"""范围查询"""
result = []
node = self._find_leaf_node(self.root, start_key)
while node:
for i, key in enumerate(node.keys):
if start_key <= key <= end_key:
result.append((key, node.data[i]))
elif key > end_key:
return result
node = node.next
return result
def _find_leaf_node(self, node, key):
"""找到键应该在的叶子节点"""
if node.is_leaf:
return node
i = self._binary_search(node.keys, key)
if i < len(node.keys) and node.keys[i] == key:
i += 1
return self._find_leaf_node(node.children[i], key)
def print_tree(self, node=None, level=0):
"""打印树结构(用于调试)"""
if node is None:
node = self.root
print(" " * level + f"Level {level}: {node.keys}")
if not node.is_leaf:
for child in node.children:
self.print_tree(child, level + 1)
# 测试代码
if __name__ == "__main__":
# 创建5阶B*树
tree = BStarTree(order=5)
# 插入测试
print("=" * 50)
print("插入测试")
print("=" * 50)
data_list = [10, 20, 30, 40, 50, 60, 70, 80, 90, 100]
for key in data_list:
tree.insert(key, f"Data{key}")
print(f"插入 {key}")
print("\n树结构:")
tree.print_tree()
# 查找测试
print("\n" + "=" * 50)
print("查找测试")
print("=" * 50)
test_keys = [30, 75, 100, 999]
for key in test_keys:
result = tree.search(key)
print(f"查找 {key}: {result}")
# 范围查询测试
print("\n" + "=" * 50)
print("范围查询测试")
print("=" * 50)
result = tree.range_query(25, 75)
print(f"范围[25, 75]: {result}")
# 删除测试
print("\n" + "=" * 50)
print("删除测试")
print("=" * 50)
tree.delete(50)
print("删除 50 后的树结构:")
tree.print_tree()
print("\n测试完成!")
# ==================================================
# 插入测试
# ==================================================
# 插入 10
# 插入 20
# 插入 30
# 插入 40
# 插入 50
# 插入 60
# 插入 70
# 插入 80
# 插入 90
# 插入 100
# 树结构:
# Level 0: [40, 70]
# Level 1: [10, 20]
# Level 1: [40, 50]
# Level 1: [70, 80, 90, 100]
# ==================================================
# 查找测试
# ==================================================
# 查找 30: None
# 查找 75: None
# 查找 100: Data100
# 查找 999: None
# ==================================================
# 范围查询测试
# ==================================================
# 范围[25, 75]: [(40, 'Data40'), (50, 'Data50'), (70, 'Data70')]
# ==================================================
# 删除测试
# ==================================================
# 删除 50 后的树结构:
# Level 0: [40, 70]
# Level 1: [10, 20]
# Level 1: [40, 70]
# Level 1: [80, 90, 100]
# 测试完成!12、优缺点分析
B*树的设计是一种典型的空间-时间权衡(更准确地说是 空间-复杂度 权衡)。
优点
- 极高的空间利用率: 最小
2/3,平均可达85%左右。这是B*树最核心的优势。 - 更少的I/O: 由于空间利用率高,存储相同数据量的节点更少,树的高度可能更低。
- 更少的节点分裂/合并: "旋转"操作作为缓冲,大大减少了真正需要(昂贵的)分裂和合并操作的频率。这在"写"操作(插入/删除)密集的场景下反而可能提升性能。
缺点
- 实现极其复杂: 插入和删除逻辑需要处理"旋转"、"2-3分裂"、"3-2合并"等多种情况,代码编写和调试难度远高于B+树。
- 插入/删除的单次开销可能更高:
- 旋转: 需要同时读/写父节点、兄弟节点和当前节点(涉及3个磁盘块),而B+树的分裂/合并通常只涉及2个(当前和父)。
- 2-3分裂 / 3-2合并: 涉及的节点更多(4个或5个),I/O开销更大。
- 适用场景有限: 只有在磁盘空间极其宝贵,且数据增长相对平稳(可以充分发挥"旋转"的优势)的场景下,B*树的优势才能盖过其复杂性。
13、总结
B*树是B树家族中一个"理论上很美"的结构。它通过牺牲实现上的简洁性(引入复杂的旋转和2-3分裂/3-2合并逻辑),换取了极致的磁盘空间利用率。
在大多数现代通用数据库(如 PostgreSQL, MySQL)中,B+树的 ~69%的平均利用率 被认为是"足够好"的,B+树的实现更简单、更可预测。因此,B*树在实际工程中并不常见。
然而,B*树的设计哲学(优先旋转、延迟分裂)在许多高性能键值存储和特定文件系统中(如HFS+, ReiserFS 3)中以各种形式被采纳,因为它确实能有效减少磁盘碎片和提高I/O效率。