KH-EtherCAT-CANFDX4-OP
EtherCAT ↔ 4× CAN FD 双向数据转发开源解决方案
🚀 项目介绍
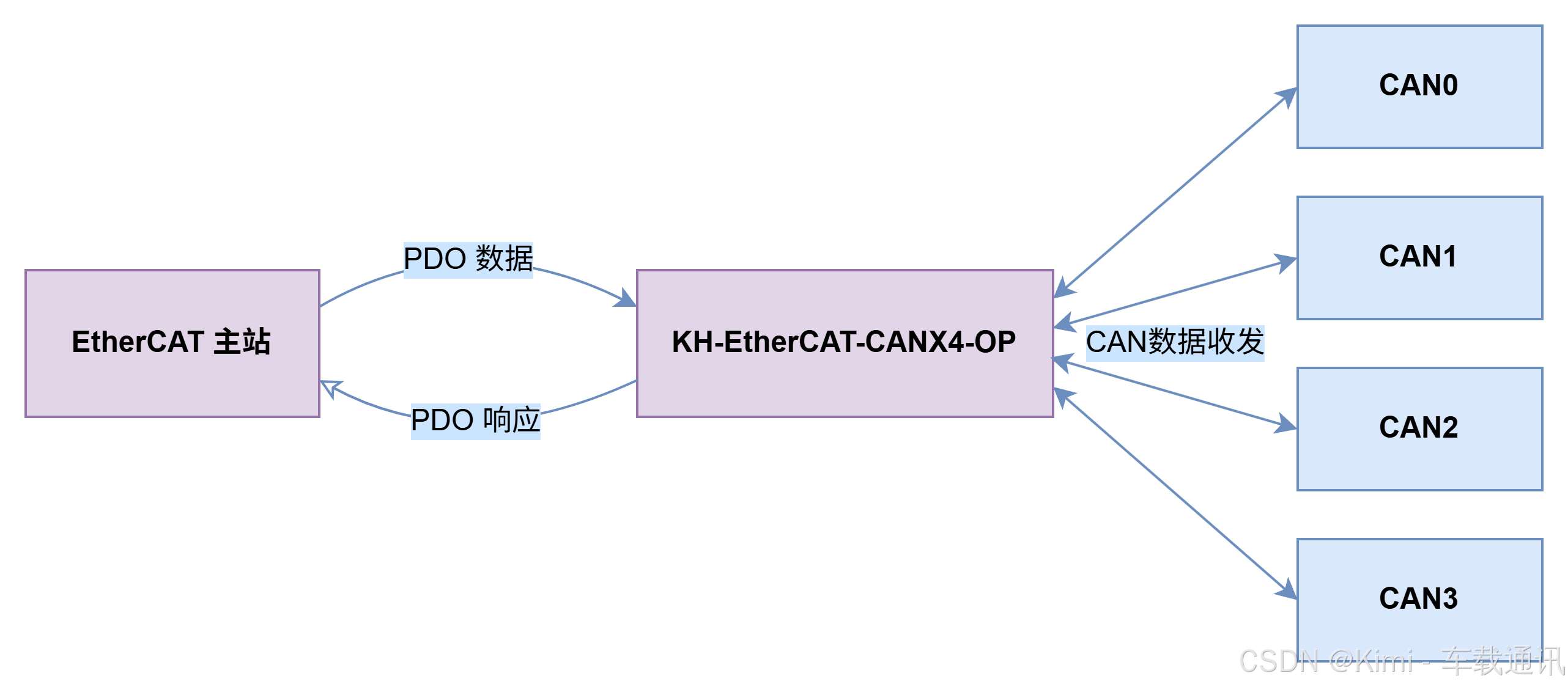
KH-EtherCAT-CANFDX4-OP 是一款开源硬件模块,模块基于 HPMicro HPM5E31 微控制器开发,实现 EtherCAT 与四通道 CAN FD 总线之间的实时双向数据转发。
功能
| 功能方向 | 说明 |
|---|---|
| Input(输入) | ECAT 主站 → ECAT 从站(接收 CAN 数据,或接收主站下发的状态/控制指令) |
| Output(输出) | ECAT 从站 → ECAT 主站(发送 CAN 数据,或向上层反馈状态) |
特性
- ✓ EtherCAT ↔ CAN FD 双向透明传输(支持 PDO/SDO 映射)
- ✓ 支持四路 CAN FD 高波特率通信,兼容传统 CAN 2.0
- ✓ 支持 EtherCAT 多从站级联
- ✓ 开源方案降低工业通信集成成本
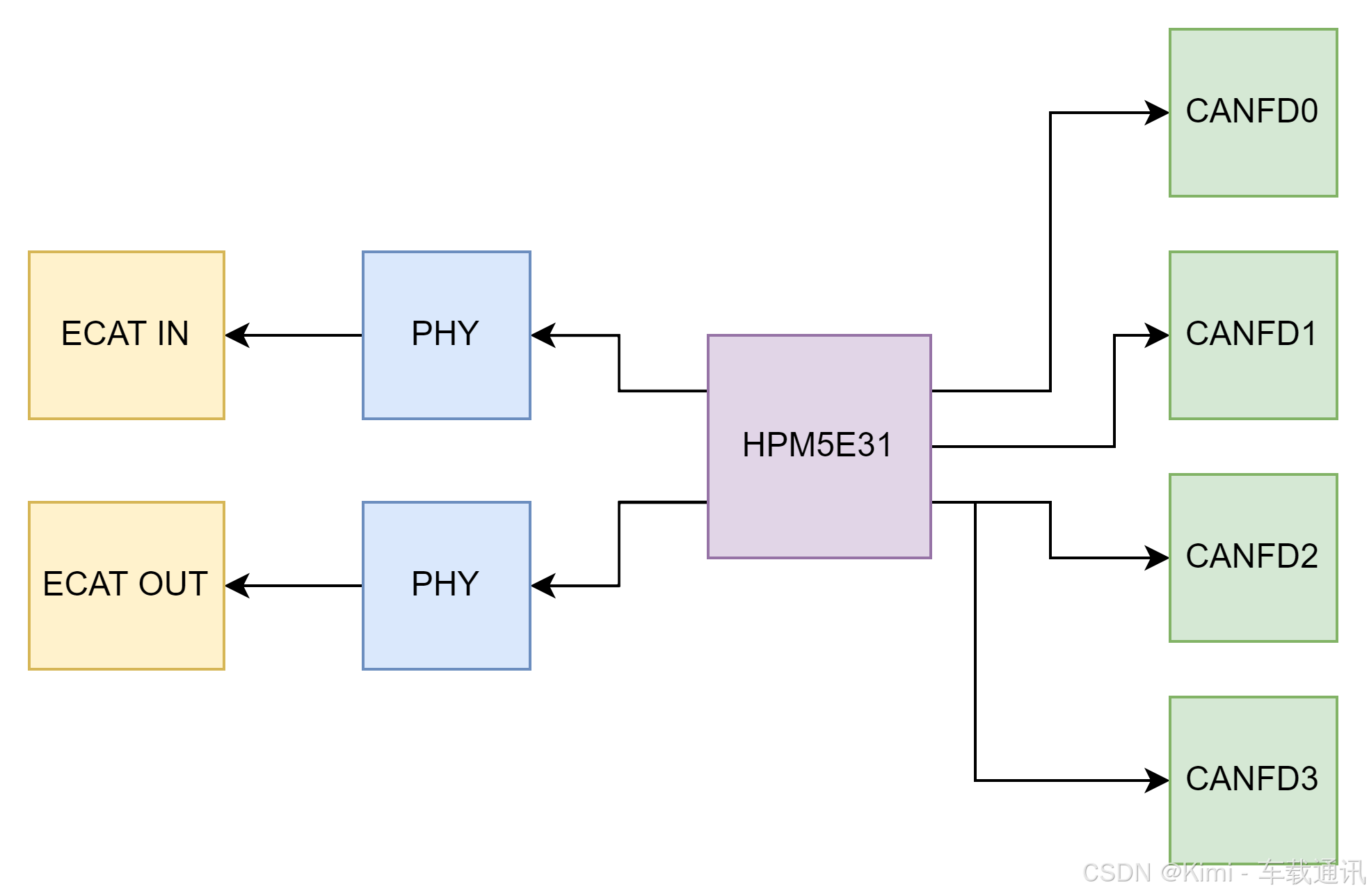
📦 硬件说明
系统框架
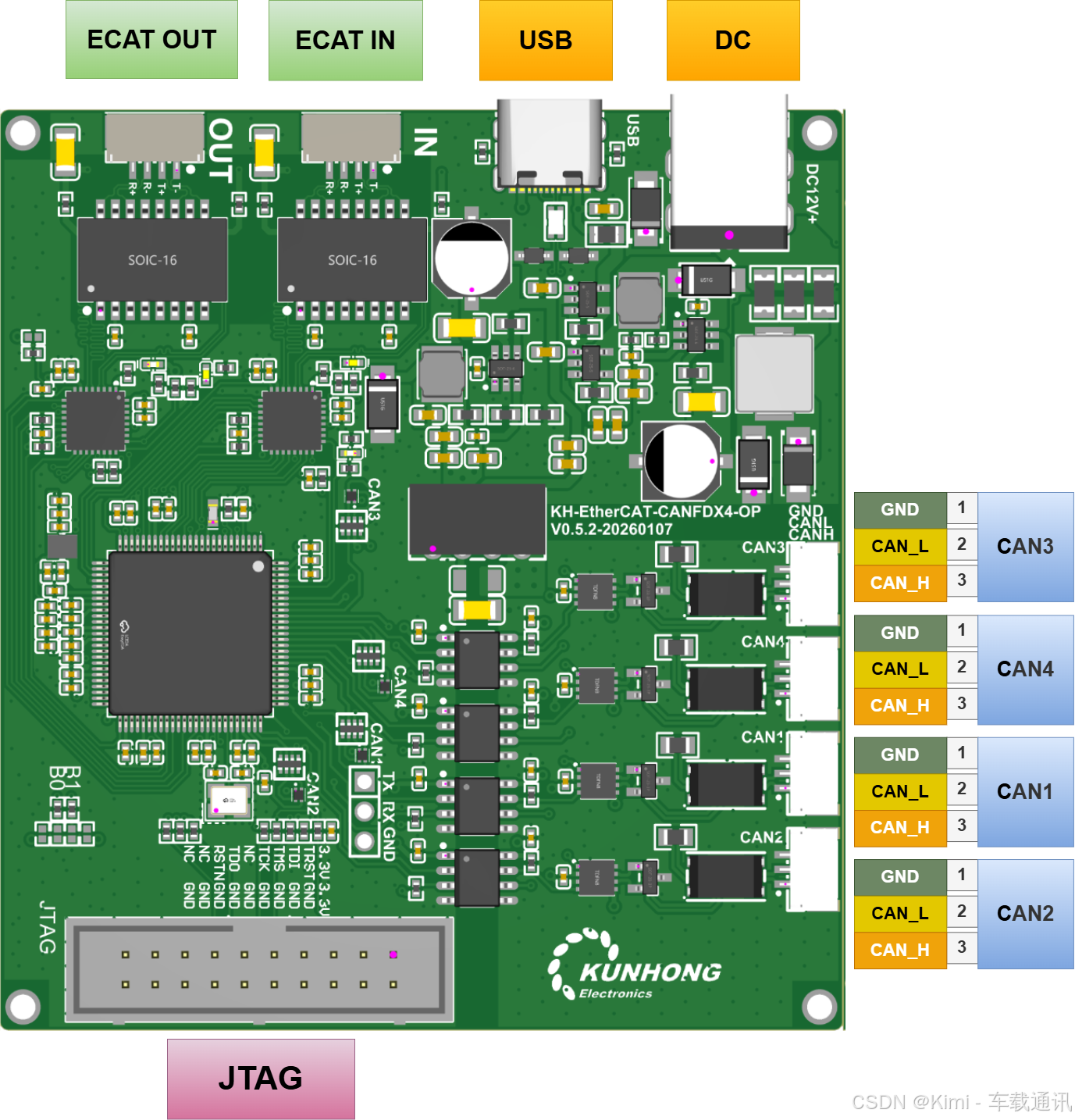
接口说明
| 接口标识 | 接口类型 | 说明 |
|---|---|---|
| IN | 4 针 GH1.25 | EtherCAT 输入接口 |
| OUT | 4 针 GH1.25 | EtherCAT 输出接口 |
| USB | USB-C 端口 | 支持 USB 口单独供电 |
| DC12V+ | 圆头直流电源接口 | 12V 直流供电输入 |
| CAN0-CAN3 | 3 针 GH1.25 | CAN 通信接口 |
| JTAG | 20 针 1.27mm 排针 | 固件烧录与调试 |
CAN 接口引脚定义
| 引脚 | 功能 | 说明 |
|---|---|---|
| 1 | GND | 信号地 |
| 2 | CAN_L | CAN 总线低电平 |
| 3 | CAN_H | CAN 总线高电平 |
🔧 测试固件
本项目提供开源测试固件,开源测试固件可满足基本的硬件测试验证,具备以下特性:
- EtherCAT 从站 : 包含 PHY 配置和先楫内置 ESC 驱动代码,可连接 TwinCAT 进行测试
- 4 通道 CANFD 驱动 : 支持独立的 4 路 CANFD 进行报文收发
- 协议转发 Demo : 固件包含 EtherCAT 转 4 路 CANFD 转发逻辑。连接 TwinCAT 后可进行 4 路 CANFD 报文的收发内容控制
🌟 开源与商业化支持
本项目开源硬件设计方案及基础测试固件源码。开源用户可参考本项目内容自行设计软硬件。
开源支持说明
- 我们不对开源用户提供单独的技术支持
- 相关技术问题可在本项目新建 Issue
- 采购成品板卡的用户,我们对板卡提供 3 个月硬件质保
用户基础要求
用户需具备以下基础,或自行学习相关内容,我们不提供相关软件和技术支持:
- EtherCAT 主站软件使用
- EtherCAT 从站固件开发
- CAN FD 相关基础知识
- HPM 先楫芯片开发基础
商业化定制支持
本项目支持按客户需求进行商业化定制,包括但不限于:
- 硬件定制:尺寸、接口、温度等级、防护要求等
- 固件定制:ESI 文件修改、通讯协议、其他固件功能
📺 功能演示
以下演示为使用本产品对达妙电机进行控制。
步骤 1:连接设备
- 设备处于 ECAT 从站工作模式
- CAN 接口连接电机,通道接口识别到对端 CAN 设备后,保持发送状态(绿灯闪烁)
步骤 2:观察 TwinCAT 界面
观察 TwinCAT 界面,可以观察到接收和发送的 CAN 帧信息:
- RxCan 显示 CAN0 持续接收电机的 CAN 帧信息,电机持续发送 ID 为 11,长度为 8 的状态数据
- TxCan 显示 CAN0 通道发送的 CAN 帧信息,持续发送信息 ID 为 1,DLC 数据长度为 8 的控制数据(对应电机 MIT 模式控制指令)
步骤 3:修改控制信息
在 TwinCAT 中修改 TxCan 控制信息,观察电机响应:
✅ 测试结果:电机响应符合预期,测试成功!
📖 项目链接
Gitee 链接 :https://gitee.com/ChengDu-KunHong/kh-ethercat-canfdx4-op
欢迎点击阅读原文或复制上方链接查看更多关于 KH-EtherCAT-CANFDX4-OP 项目信息