一、研究背景与动机
传统插值(nearest-neighbor、bilinear、bicubic)基于"点像素"模型,把像素当成无面积的点,易产生锯齿、模糊或振铃。
论文提出"area pixel model":把像素视为具有均匀光强的正方形小瓦片;面积守恒、能量守恒,更符合图像采集物理过程。
目标:在保证边缘清晰度的同时,显著降低计算复杂度和存储带宽,使之适合低成本 LCD 控制器、FPGA 或 VLSI 实时实现。
二、核心算法原理
2.1 面积像素模型
原图每个像素看作 1×1 的正方形,强度恒定,缩放因子 (m,n) 后,目标像素变为 1/m × 1/n 的长方形,其强度取为与原图所有重叠面积加权和。
总面积守恒:∑目标像素面积 = ∑原像素面积,避免能量漂移。
2.2 插值公式
缩放后像素值计算:
P = S R × ( A 0 ⋅ C 0 + A 1 ⋅ C 1 + A 2 ⋅ C 2 + A 3 ⋅ C 3 ) P=SR×(A0⋅C0+A1⋅C1+A2⋅C2+A3⋅C3) P=SR×(A0⋅C0+A1⋅C1+A2⋅C2+A3⋅C3)
其中:
-
S R = w i n W × w i n H 1 SR=winW×winH1 SR=winW×winH1 为缩放比例因子
-
C0 -C3 为原始图像中最多4个相关像素的值
-
A0 -A3 为滤波窗口与各原始像素的重叠面积
同一公式适用于放大和缩小
2.3 边缘保持机制
• 面积模型天然具有低通滤波特性,但又不像 bicubic 那样在边缘处产生过冲;
• 通过调节"smoothness factor"(权重归一化方式)可在锐度和平滑之间折中。
三、性能评估
3.1 主观质量
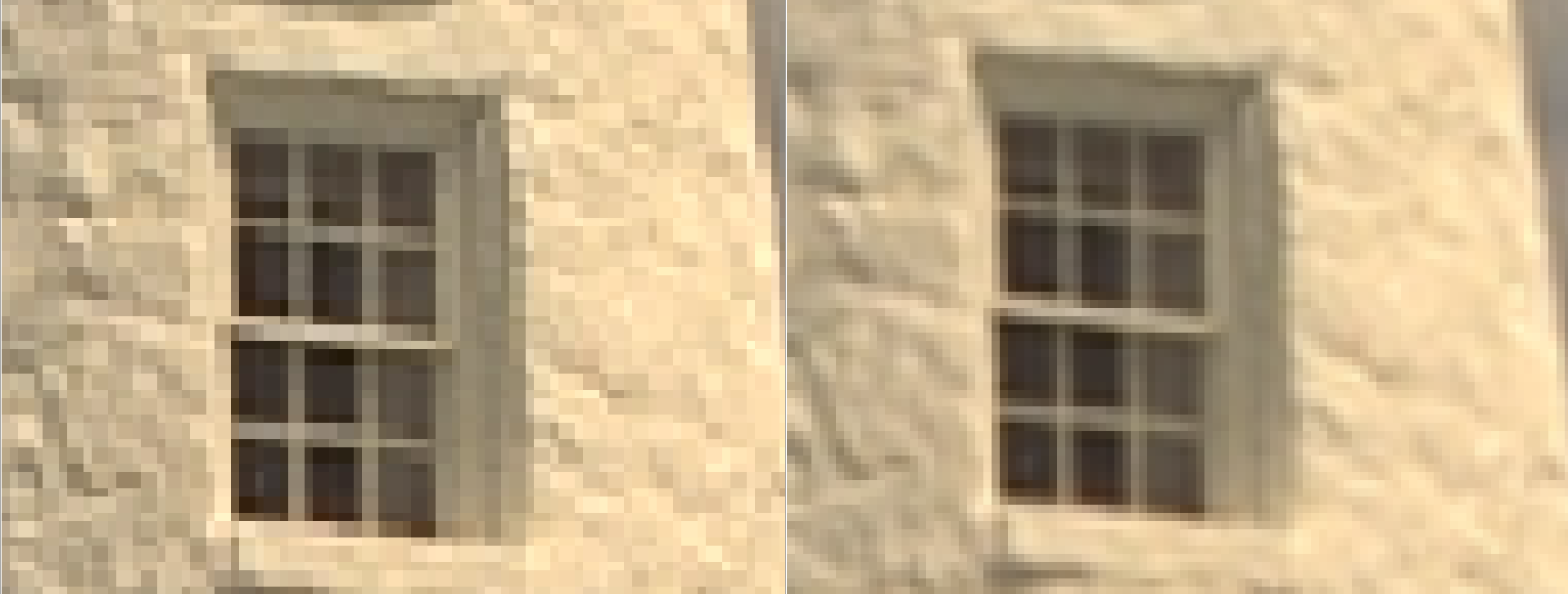
左侧是Winscale效果,右侧是bilinear效果。
与 bilinear 相比,Winscale 边缘更锐利,阶梯和模糊现象明显降低;
与 bicubic 相比,无振铃,但极细纹理略逊于 bicubic。
3.2 客观指标(文献汇总)
• RMSE/PSNR:平均优于 bilinear 0.5--1.2 dB;比 bicubic 低 0.2--0.4 dB。
• 边缘宽度(Edge width)指标减小 8--15%,表明边缘更陡。
四、优点与局限性 优点
- 算法简单,适合低门数、低功耗场景;
- 边缘保持优于 bilinear,无 bicubic 振铃;
- 支持 up/down 任意比例,比例实时可变;
结论
Winscale 以"面积像素"思想为核心,用极低的硬件成本换取了优于 bilinear 的视觉效果,成为 2000 年代初中端 LCD 控制器、视频 SoC 的默认 scaler。其提出的面积守恒模型对后续低功耗、流式图像处理算法设计具有长期启发意义。
觉得本文对您有一点帮助,欢迎讨论、点赞、收藏,您的支持激励我多多创作。