1.什么是滑模控制?
滑模控制是一种变结构控制,属于非线性鲁棒控制方法。其核心思想是:
1.设计一个滑模面(SlidingSurface):一个在状态空间中的超平面或流形。当系统的状态轨迹被约束在这个面上时,系统将表现出预设的、理想的动态特性(如指数收敛),并且对匹配的干扰和模型不确定性具有完全鲁棒性。
2.设计控制律,将系统状态"驱赶"到滑模面上:控制律会故意地进行高频切换,一旦系统状态偏离滑模面,就以极大的控制力将其拉回。这个状态轨迹被强制"滑动"到平衡点的过程,就是"滑模"名称的由来。
核心比喻:就像让一个小球在一条不平整的斜槽中滚动。滑模面就是斜槽的"理想中线"。控制力就像在斜槽两侧快速、高频地敲击小球,让它始终沿着中线滚动,无论斜槽表面有多粗糙(代表干扰和不确定性),最终都能准确地滚到底部目标点。
2.无人机滑模控制模块的组成
一个典型的无人机(以最常见的四旋翼为例)滑模控制模块通常采用内外环级联结构:

滑模控制通常应用于姿态环,因为姿态动态非线性强、耦合度高,且对扰动(如风扰、模型误差)敏感。位置环有时也会使用。
一个滑模控制模块通常包含以下几个子模块:
a.状态误差计算模块

b.滑模面设计模块

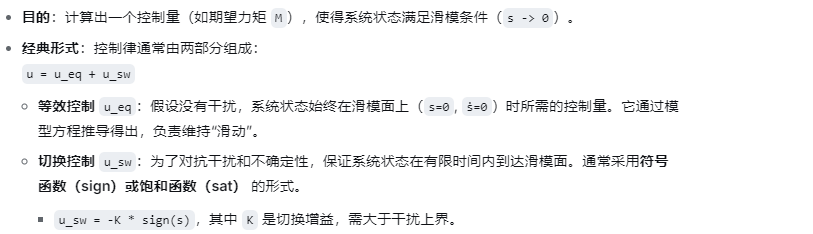
c.控制律计算模块
d.抖振缓解模块
问题:理想的`sign(s)`函数会导致控制量在高频切换,在实际系统中由于延迟和惯性,会引发剧烈的抖振,损坏执行器(电机、电调)并激发未建模动态。
解决方案:
高阶滑模:如超螺旋算法,能在保持鲁棒性的同时,将抖振"平滑"到控制量的高阶导数中。
自适应滑模:自适应地调整切换增益`K`,使其刚好略大于实际干扰,避免过大的增益导致抖振。
3.设计步骤示例
1.建立模型:

2.定义误差:

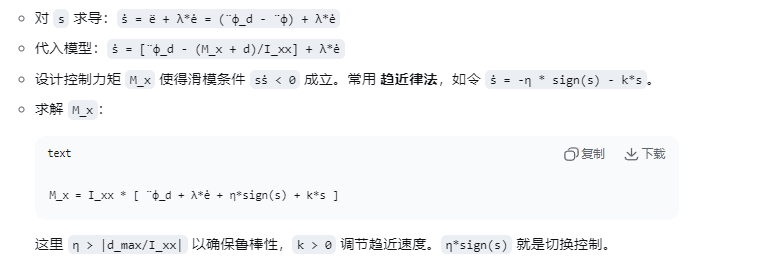
3.设计滑模面:

4.设计控制律:
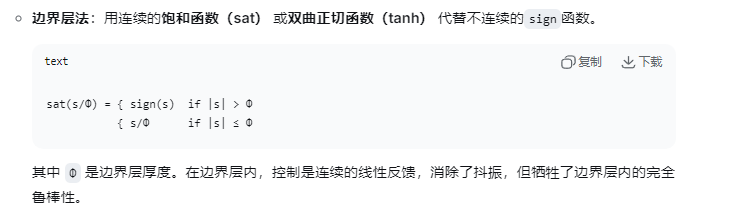
5.加入边界层:

4.高级变体与发展趋势
为了克服经典滑模的缺点,研究者提出了许多改进方案:
终端滑模:设计非线性滑模面,实现有限时间收敛,而非指数收敛。
积分滑模:消除稳态误差,提高跟踪精度。
自适应滑模:在线估计干扰上界或系统参数,自适应调整增益,减少保守性。
模糊/神经网络滑模:用智能方法逼近不确定项,降低对切换项的依赖。
高阶滑模:如超螺旋算法,无需系统状态的导数信息,且能显著抑制抖振。