《FPGA经典例程及解读--基于xilinx K325T平台》系列导航
本专栏主要针对与想学习FPGA的同学,从基础的点灯到之后的复杂功能实战例程,从入门到进阶,通过这些例程的学习和了解,希望可以帮助你从一个FPGA小白进阶到FPGA中级阶段,能够处理工作中大多数的FPGA使用场景。
本篇是该系列的第七篇内容
上一篇:FPGA例程(6):UART串口通讯协议解析_fpga串口通信程序详解-CSDN博客
**下一篇:**关注我,第一时间获取更新!!!
1 概述
上一篇我们介绍了UART串口的协议,本篇我们以UART串口接收程序为案例,说明一下状态机的写法。
2 状态机的结构简述
状态机的详细理论介绍,大家可以查看这一篇FPGA基础知识(六):状态机设计实战--从概念到可靠实现的完整指南-CSDN博客
2.1 状态机三要素
-
状态:不是简单的计数器,而是系统当前所处的"工作状态"
-
转移条件:状态变化的"触发事件",需要明确且无歧义
-
输出:在特定状态下产生的"动作响应"
2.2 状态机常见的的编码方式
- 顺序二进制编码:按00-01-10-11的顺序编码,资源最省,但多个状态位同时变化易产生毛刺
- 格雷码编码:按00-01-11-10的顺序编码,状态转化时只有一位变化,可靠性高,功耗低,但编码没有顺序二进制的方式直观
- 热编码:按0001-0010-0100-1000的方式编码,时序性能好,但需要更多的资源。
2.3 三段式状态机
经典模板如下:
// 第一段:状态寄存器(时序逻辑)
always @(posedge clk or negedge rst_n) begin
if (!rst_n)
current_state <= IDLE;
else
current_state <= next_state;
end
// 第二段:下一状态逻辑(组合逻辑)
always @(*) begin
next_state = current_state; // 默认保持当前状态
case (current_state)
IDLE: begin
if (start_signal)
next_state = START;
end
START: begin
if (ready_signal)
next_state = WORK;
else if (timeout)
next_state = IDLE;
end
WORK: begin
if (done_signal)
next_state = DONE;
end
DONE: begin
next_state = IDLE;
end
default:
next_state = IDLE;
endcase
end
// 第三段:输出逻辑(Moore风格 - 时序逻辑)
always @(posedge clk or negedge rst_n) begin
if (!rst_n) begin
output_bus <= 'b0;
control_sig <= 1'b0;
end else begin
// 默认输出值
output_bus <= 'b0;
control_sig <= 1'b0;
case (current_state) // Moore:输出只依赖于当前状态
START: control_sig <= 1'b1;
WORK: begin
output_bus <= work_data;
control_sig <= 1'b1;
end
DONE: output_bus <= result_data;
endcase
end
end为什么推荐这种结构?
-
时序清晰:状态注册和输出生成都在时钟沿完成
-
避免毛刺:组合逻辑只用于状态转移判断
-
综合友好:工具能够很好地进行时序分析和优化
3 UART串口接收模块程序设计
参考FPGA例程(6):UART串口通讯协议解析_fpga串口通信程序详解-CSDN博客的串口接收协议。
3.1 接收模块配置说明
串口接收模块是个参数可配置模块:
BAUD_DIV:依据波特率和采样时钟计算出的分频系数,例如采样时钟50MHz,我们希望波特率为115200bps,那BAUD_DIV = 50_000000 / 115200 = 434
D_WORD_NUM:数据位,我们使用的是8位,那这里就是8,有的时候会用到6位或者7位,修改这个值即可。
3.2 接收模块状态转移流程说明
接收模块状态机转移流程如下:
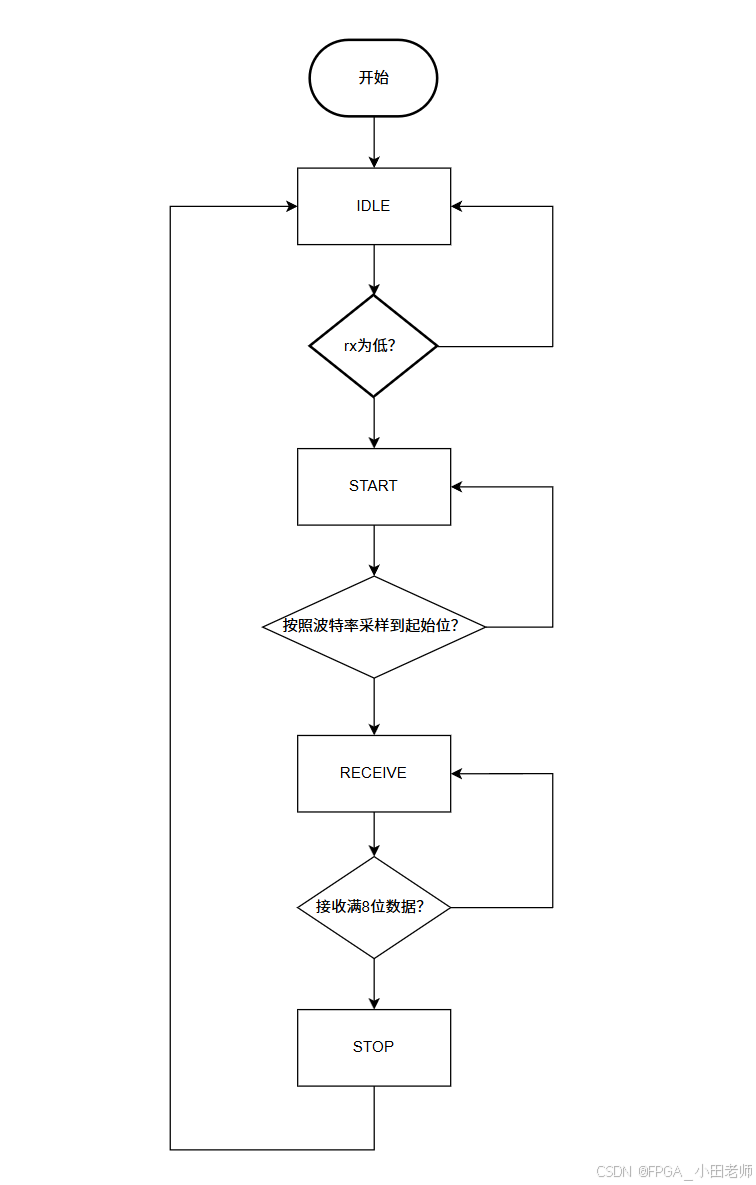
**IDLE:**是空闲状态,上电后进入IDLE状态,如果rx为低,我们认为接收到了串口的起始位,进入状态START
**START:**接收完起始位(即等待一个数据位的时间)后进入数据接收状态RECEIVE
**RECEIVE:**接收数据位,我们设定为8位,等待8位都接收完成之后进入STOP
**STOP:**停止位,之后再一次进入IDLE状态,等待下一包数据即可。
3.3 接收状态机设计
我们使用三段式状态机完成接收模块的设计
下面是第一段和第二段 :主要控制状态机的状态转移逻辑,其中,
第一段是时序逻辑,内部使用<=;
第二段是组合逻辑,内部使用=;
这里一定要注意,在同一个always块中,绝对不可以混用阻塞赋值和非阻塞赋值。
// =======================================================
// 状态机定义
localparam IDLE = 4'd0;
localparam START = 4'd1;
localparam RECEIVE = 4'd2;
localparam STOP = 4'd3;
// --------- 控制状态机
reg [3:0] current_state,next_state;
always @ (posedge clk or negedge rstn) begin
if (!rstn) begin
current_state <= IDLE;
end else begin
current_state <= next_state;
end
end
// ----------- 主状态机
always @ (*) begin
next_state = current_state;
case(current_state)
IDLE:begin
if (!rx_c1) begin
next_state = START;
end
end
START:begin
if(baud_clk)begin
next_state = RECEIVE;
end
end
RECEIVE:begin
if ((bit_cnt == D_WORD_NUM-1 ) && (baud_cnt == BAUD_DIV-1)) begin // 已接收8位
next_state = STOP;
end
end
STOP:begin
next_state = IDLE;
end
default:begin
next_state = IDLE;
end
endcase
end第三段为状态输入输出逻辑,一般按照我们的功能分为独立的always块
例如1:接收数据位计数块,always块内部仅产生bit_cnt,当在RECEIVE状态下,每采样一次bit_cnt+1;
// ------------ 接收数据位计数
reg [3:0] bit_cnt; // 位计数器
always @ (posedge clk or negedge rstn) begin
if (!rstn) begin
bit_cnt <= 4'd0;
end
else begin
if (baud_clk) begin
if (current_state == START) begin
bit_cnt <= 4'd0;
end
else if (current_state == RECEIVE) begin
bit_cnt <= bit_cnt + 4'd1;
end
else begin
bit_cnt <= bit_cnt;
end
end
end
end例如2:数据包有效的使能信号,当我们接收到rx的下降沿时,认为接收到有效数据,当我们接收够D_WORD_NUM的数据位后,认为该包数据接收完成,always块中仅产生start信号。
// ----------- 生成 单帧接收使能信号
reg start; // start有效时 才接收数据
always @ (posedge clk or negedge rstn) begin
if (!rstn) begin
start <= 1'b0;
end
else begin
if (!rx_c0 & rx_c1) begin
start <= 1'b1;
end
else if ((baud_cnt == BAUD_DIV-1) && (bit_cnt == D_WORD_NUM-1)) begin
start <= 1'b0;
end
else begin
start <= start;
end
end
end最终的实现代码如下:
`timescale 1ns / 1ps
//////////////////////////////////////////////////////////////////////////////////
// Company:
// Engineer:
//
// Create Date: 2026/01/16 16:29:11
// Design Name:
// Module Name: uart_rx
// Project Name:
// Target Devices:
// Tool Versions:
// Description:
//
// Dependencies:
//
// Revision:
// Revision 0.01 - File Created
// Additional Comments:
//
//////////////////////////////////////////////////////////////////////////////////
module uart_rx # (
parameter D_WORD_NUM = 4'd8,
parameter BAUD_DIV = 16'd434
)(
input clk,
input rstn,
input uart_rx_i,
output [D_WORD_NUM-1:0] uart_rx_data_o,
output uart_rx_done
);
// parameter D_WORD_NUM = 8;
// parameter BAUD_DIV = 16'd434;
// =======================================================
// 状态机定义
localparam IDLE = 4'd0;
localparam START = 4'd1;
localparam RECEIVE = 4'd2;
localparam STOP = 4'd3;
// --------- 控制状态机
reg [3:0] current_state,next_state;
always @ (posedge clk or negedge rstn) begin
if (!rstn) begin
current_state <= IDLE;
end else begin
current_state <= next_state;
end
end
// ----------- 主状态机
always @ (*) begin
next_state = current_state;
case(current_state)
IDLE:begin
if (!rx_c1) begin
next_state = START;
end
end
START:begin
if(baud_clk)begin
next_state = RECEIVE;
end
end
RECEIVE:begin
if ((bit_cnt == D_WORD_NUM-1 ) && (baud_cnt == BAUD_DIV-1)) begin // 已接收8位
next_state <= STOP;
end
end
STOP:begin
next_state = IDLE;
end
default:begin
next_state = IDLE;
end
endcase
end
// ==========================================================
// ------------- 输入信号同步
reg rx_c0,rx_c1;
always @ (posedge clk) begin
rx_c0 <= uart_rx_i;
rx_c1 <= rx_c0;
end
// ------------ 接收数据位计数
reg [3:0] bit_cnt; // 位计数器
always @ (posedge clk or negedge rstn) begin
if (!rstn) begin
bit_cnt <= 4'd0;
end
else begin
if (baud_clk) begin
if (current_state == START) begin
bit_cnt <= 4'd0;
end
else if (current_state == RECEIVE) begin
bit_cnt <= bit_cnt + 4'd1;
end
else begin
bit_cnt <= bit_cnt;
end
end
end
end
// ----------- 生成 单帧接收使能信号
reg start; // start有效时 才接收数据
always @ (posedge clk or negedge rstn) begin
if (!rstn) begin
start <= 1'b0;
end
else begin
if (!rx_c0 & rx_c1) begin
start <= 1'b1;
end
else if ((baud_cnt == BAUD_DIV-1) && (bit_cnt == D_WORD_NUM-1)) begin
start <= 1'b0;
end
else begin
start <= start;
end
end
end
// ------------ 波特率时钟生成
reg [15:0] baud_cnt; // 波特率计数器
always @(posedge clk or negedge rstn) begin
if (!rstn) begin
baud_cnt <= 16'd0;
end else begin
if (start) begin
if (baud_cnt >= BAUD_DIV - 1) begin
baud_cnt <= 16'd0;
end else begin
baud_cnt <= baud_cnt + 16'd1;
end
end
else begin
baud_cnt <= 16'd0;
end
end
end
wire baud_clk; // 波特率时钟
assign baud_clk = (baud_cnt == BAUD_DIV - 1) ? 1'b1:1'b0;
// ------------ 串并转换
wire data_en ;
assign data_en = (baud_cnt == BAUD_DIV >> 1)?1'b1:1'b0;
reg [ D_WORD_NUM-1:0] rx_shift; // 接收移位寄存器
always @(posedge clk or negedge rstn) begin
if (!rstn) begin
rx_shift <= 8'd0;
end
else begin
if (data_en && (current_state == RECEIVE)) begin
rx_shift <= {rx_c1, rx_shift[ D_WORD_NUM-1:1]}; // 右移,LSB在前
end
else begin
rx_shift <=rx_shift;
end
end
end
// -------------- 数据锁存
reg [7:0] data;
always @ (posedge clk or negedge rstn) begin
if (!rstn) begin
data <= 8'd0;
end
else begin
if (current_state == STOP) begin
data <= rx_shift; // 保存接收的数据
end
else begin
data <= data;
end
end
end
assign uart_rx_data_o = data;
// ----------------- 生成一帧数据接收完成的标志
reg rx_done;
always @ (posedge clk or negedge rstn) begin
if (!rstn) begin
rx_done <= 1'b0;
end
else begin
if (current_state == STOP) begin
rx_done <= 1'b1;
end
else begin
rx_done <= 1'b0;
end
end
end
assign uart_rx_done = rx_done;
// ==========================================================
endmodule4 总结
本文以串口接收程序为案例,讲述了状态机的编写方式,我很推荐大家进行这样编写,因为这种每个always块中仅产生一个信号的编写方式能让我们更明确这个信号的时序,当出现问题或者bug的时候,我们也仅需要对一个always块进行分析即可。那下一篇我们继续来说一说串口发送程序。