文章目录
- 引言:为什么你的代码三个月后就"不敢动"了?
- 一、诊断:典型的"烂设计"是如何长出来的?
-
- 阶段一:初学者的"任务=功能"误区
- 阶段二:全局变量的"无序狂欢"
- [阶段三:为了修 Bug 而打的"补丁"](#阶段三:为了修 Bug 而打的“补丁”)
- 二、重构核心:什么是"事件驱动状态机"?
- 三、实战演练:手把手搭建生产级架构
-
-
- [1. 定义系统的"语言":事件](#1. 定义系统的“语言”:事件)
- [2. 构建核心枢纽:事件队列](#2. 构建核心枢纽:事件队列)
- [3. 中断里的"极简主义"](#3. 中断里的“极简主义”)
- [4. 系统大脑:状态机任务 (The Main Loop)](#4. 系统大脑:状态机任务 (The Main Loop))
-
- 四、进阶:这套架构为什么"高级"?
- 五、高手避坑指南 (The Gotchas)
-
-
- [坑 1:事件队列满了怎么办?](#坑 1:事件队列满了怎么办?)
- [坑 2:大数据的传递](#坑 2:大数据的传递)
- [坑 3:看门狗怎么喂?](#坑 3:看门狗怎么喂?)
-
- 六、本文总结
- 七、相关推荐
引言:为什么你的代码三个月后就"不敢动"了?
在嵌入式开发圈,有一个心照不宣的噩梦:Demo 阶段风驰电掣,交付半年后寸步难行。
你可能经历过这样的场景:
- 为了加一个简单的"按键长按"功能,却导致串口数据偶尔丢包。
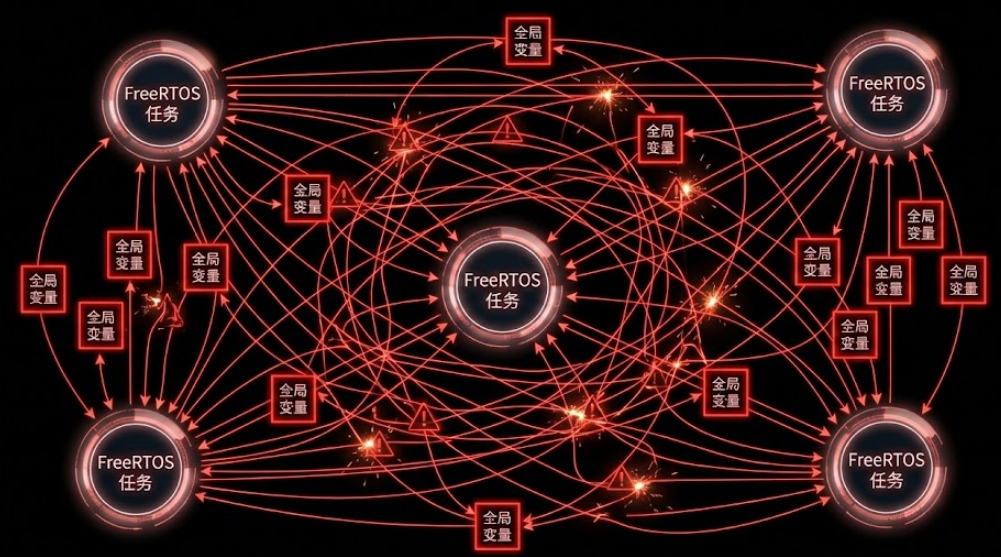
- 全局变量满天飞,
g_SystemState在五个任务和三个中断里被修改,出了 Bug 根本不知道是谁改的。 - 新人入职接手代码,看了一周后问你:"哥,这个
flag到底是在哪被清零的?"你支支吾吾答不上来。
这不是 你技术能力的问题,而是架构设计一开始就没为"时间"负责。
大多数 STM32 + FreeRTOS 的教程只教你 API 怎么调:怎么创建任务、怎么发信号量。但很少有人告诉你:当任务超过 5 个,代码量超过 2 万行时,该怎么组织代码才不会崩?
本文将剥离所有虚头巴脑的概念,带你重构一套能稳定运行三年、经得起反复迭代的"事件驱动状态机"架构。
一、诊断:典型的"烂设计"是如何长出来的?
在谈"好架构"之前,我们先得有勇气直面"烂代码"。大多数不可维护的工程,都死在以下三个阶段的"自然生长"中。
阶段一:初学者的"任务=功能"误区
这是最直观,也是坑最深的写法。你觉得每个功能应该有一个任务:
c
// 串口任务
void Task_UART(void *arg) {
while(1) {
if(ReadByte(&data)) {
ProcessProtocol(data); // 就在这里处理协议
}
}
}
// 按键任务
void Task_Key(void *arg) {
while(1) {
if(HAL_GPIO_ReadPin(...) == LOW) {
ExecuteKeyLogic(); // 就在这里执行业务
}
vTaskDelay(10);
}
}死因分析 :
业务逻辑被"硬编码"在具体的硬件驱动任务里。如果哪天需求变了:"收到串口指令后,模拟一次按键按下"。你怎么改?你得在串口任务里调用按键处理函数,耦合瞬间产生。
阶段二:全局变量的"无序狂欢"
为了让任务间通信,你引入了全局变量:
c
// 全局状态
volatile int system_state = 0;
void Task_A() {
if (system_state == IDLE) { ... }
}
void HAL_UART_RxCpltCallback() {
// 中断里直接改业务状态,大忌!
system_state = BUSY;
}死因分析:
- 竞态风险:谁都在读,谁都在写,且没有原子保护。
- 逻辑黑洞 :中断里写业务逻辑是系统不稳定的万恶之源。中断只应该做一件事:通知 。
阶段三:为了修 Bug 而打的"补丁"
系统偶尔死机,你查不出原因,于是开始加 vTaskDelay,加 EnterCritical,甚至在回调函数里写复杂的 if-else。最终,这坨代码变成了谁也不敢动的"神圣屎山"。
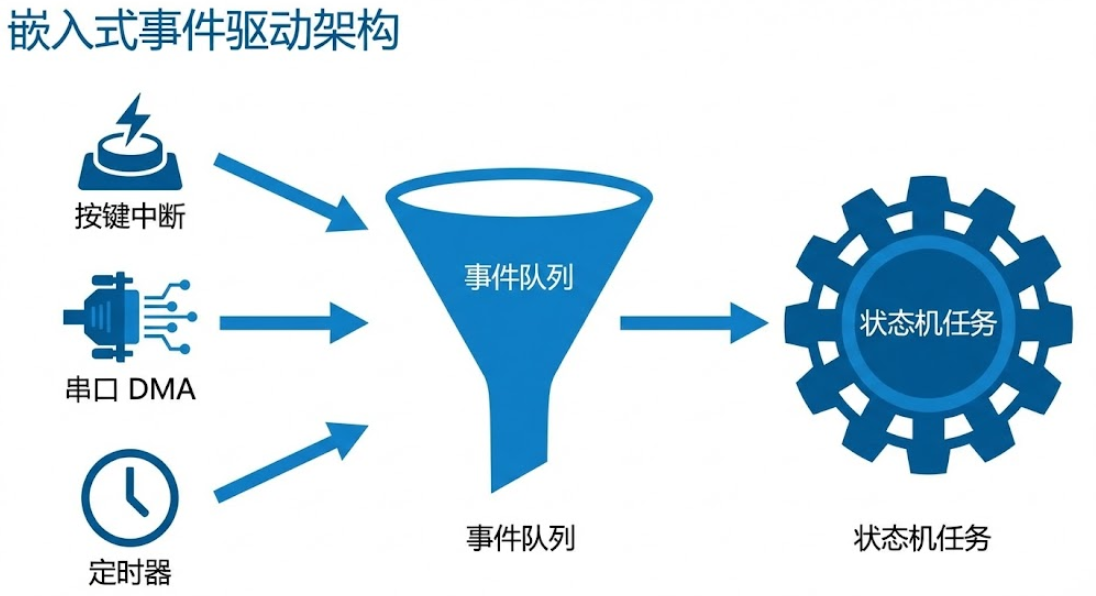
二、重构核心:什么是"事件驱动状态机"?
要解决上述问题,必须通过架构手段强行物理隔离"发生了什么 "(事件)和"要做什么"(业务)。
我们需要的架构图如下:
业务逻辑层 (Consumer)
核心调度层 (Broker)
硬件/驱动层 (Producer)
发送事件
发送事件
发送事件
提取事件
匹配状态+事件
更新状态
GPIO 中断
系统事件队列
UART DMA
定时器回调
主控状态机任务
执行动作 Action
State 变量
三大铁律:
- 唯一入口:所有外部刺激(中断、按键、超时)必须封装成"事件",扔进同一个队列。
- 唯一大脑 :系统只有一个高优先级的任务(状态机任务)有权从队列取事件,并拥有修改
Current_State的独家解释权。 - 无状态动作:具体的执行函数(Action)只负责干活,不负责保存状态。
三、实战演练:手把手搭建生产级架构
下面我们将基于 C 语言,在 STM32 平台上实现这套架构。代码不追求炫技,只追求稳健。
1. 定义系统的"语言":事件
不要用 0, 1, 2 这种魔鬼数字,用枚举清晰定义系统中发生的所有事。
c
// system_event.h
// 1. 事件类型定义(只描述事实,不描述动作)
typedef enum {
EVT_NONE = 0,
// 硬件输入类
EVT_KEY_SHORT_PRESS, // 短按
EVT_KEY_LONG_PRESS, // 长按
EVT_USB_PLUG_IN, // USB插入
// 通信类
EVT_UART_PACKET_RECV, // 收到完整数据包
EVT_WIFI_DISCONNECTED, // WiFi断开
// 内部定时类
EVT_TIMEOUT_HEARTBEAT, // 心跳超时
EVT_TIMEOUT_DISPLAY, // 亮屏超时
} sys_event_type_t;
// 2. 事件载体结构
typedef struct {
sys_event_type_t type; // 事件类型
uint32_t param; // 附加参数 (如: 哪个按键,或者数据指针)
void *ptr; // 扩展指针 (用于变长数据,需注意内存管理)
} sys_event_t;2. 构建核心枢纽:事件队列
这是连接中断和任务的唯一桥梁。
c
// system_core.c
static QueueHandle_t g_sys_event_queue = NULL;
void System_Core_Init(void) {
// 深度根据业务繁忙程度定,一般 16-32 足够
g_sys_event_queue = xQueueCreate(32, sizeof(sys_event_t));
if (g_sys_event_queue == NULL) {
Error_Handler(); // 核心组件创建失败,必须死锁或复位
}
}
// 发送事件的通用接口(线程安全)
bool System_SendEvent(sys_event_t *evt) {
if (xPortIsInsideInterrupt()) {
BaseType_t xHigherPriorityTaskWoken = pdFALSE;
xQueueSendFromISR(g_sys_event_queue, evt, &xHigherPriorityTaskWoken);
portYIELD_FROM_ISR(xHigherPriorityTaskWoken); // 关键!及时切换
return true;
} else {
return (xQueueSend(g_sys_event_queue, evt, 10) == pdPASS);
}
}3. 中断里的"极简主义"
在中断回调中,严禁 写任何业务逻辑,甚至连 printf 都不要写。只做一件事:打包事件,发送。
c
// stm32_it.c 或 main.c 的回调中
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin) {
if (GPIO_Pin == USER_BUTTON_Pin) {
sys_event_t evt;
evt.type = EVT_KEY_SHORT_PRESS;
evt.param = 0; // 可以用来区分是哪个按键
System_SendEvent(&evt);
}
}
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart) {
// 假设使用了 DMA+空闲中断,这里只是示意
sys_event_t evt;
evt.type = EVT_UART_PACKET_RECV;
evt.param = rx_buffer_len;
System_SendEvent(&evt);
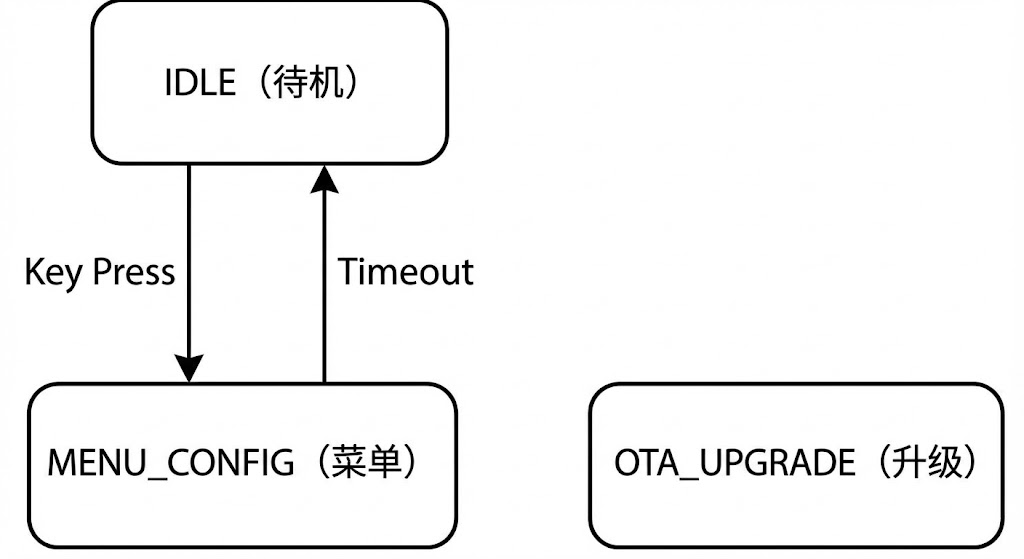
}4. 系统大脑:状态机任务 (The Main Loop)
有待机状态,菜单状态,升级状态。
这是整个工程最核心的代码段。
c
// app_main_task.c
// 定义系统状态
typedef enum {
STATE_IDLE, // 待机
STATE_MENU_CONFIG, // 设置菜单
STATE_OTA_UPGRADE, // 升级中
STATE_ERROR_LOCK, // 故障锁定
} sys_state_t;
static sys_state_t g_current_state = STATE_IDLE;
// 状态机处理函数 (纯逻辑,无阻塞)
static void Process_StateMachine(sys_event_t *evt) {
switch (g_current_state) {
// --- 待机状态 ---
case STATE_IDLE:
if (evt->type == EVT_KEY_SHORT_PRESS) {
LCD_TurnOn(); // 动作
g_current_state = STATE_MENU_CONFIG; // 状态迁移
}
else if (evt->type == EVT_UART_PACKET_RECV) {
Protocol_Parse(evt->ptr); // 处理数据
// 保持状态不变
}
break;
// --- 菜单设置状态 ---
case STATE_MENU_CONFIG:
if (evt->type == EVT_TIMEOUT_DISPLAY) {
LCD_TurnOff();
g_current_state = STATE_IDLE; // 超时自动回首页
}
else if (evt->type == EVT_KEY_SHORT_PRESS) {
Menu_NextItem(); // 切换选项
}
break;
// --- 更多状态... ---
}
}
// 主任务
void Task_System_Core(void *arg) {
sys_event_t evt;
for (;;) {
// 永久阻塞等待事件,不费 CPU
if (xQueueReceive(g_sys_event_queue, &evt, portMAX_DELAY) == pdPASS) {
// 收到事件,进入状态机处理
Process_StateMachine(&evt);
// 如果事件带有动态内存指针,必须在这里释放!
if (evt.ptr != NULL) {
vPortFree(evt.ptr);
}
}
}
}四、进阶:这套架构为什么"高级"?
你可能会问:"这不就是加了个 Switch-Case 吗?有什么了不起?"
这背后的认知升级在于:它把系统的时间复杂度从 O(N*M) 降到了 O(1)。
- 解耦了"源"与"端" :
按键驱动根本不需要知道现在系统是"待机"还是"OTA"。它只管发EVT_KEY。如果明天需求变了,说"OTA 时按键无效",你只需要去STATE_OTA_UPGRADE的 Case 里删掉对按键事件的响应即可,驱动代码一行都不用改。 - 消灭了"隐式状态" :
以前你可能通过if (flag_a && flag_b && !flag_c)来判断能否执行某操作。现在,所有合法的路径都白纸黑字写在switch-case里。如果STATE_ERROR下没有处理EVT_UART_PACKET,那么系统在故障时就绝不会响应串口指令。这叫**"默认安全" (Secure by Default)**。 - 调试极其清晰 :
遇到 Bug,你只需要在Process_StateMachine入口处打印一行 log:
[LOG] State: 1, Event: 5
你就能复现出系统死机前的所有动作序列。这在复杂现场问题的排查中是上帝视角。
五、高手避坑指南 (The Gotchas)
尽管这套架构很强,但如果不注意细节,依然会翻车。以下是三个血泪教训:
坑 1:事件队列满了怎么办?
现象 :系统高负荷时,按键没反应,或者丢包。
对策:
- 区分优先级:不要把高频传感器数据(如 1kHz 的加速度计采样)直接塞进这个事件队列。高频数据应由 DMA 搬运,只发一个"数据准备好"的事件。
- 队列防爆 :
xQueueSend失败时,必须要有错误处理(如亮红灯或记录日志),不能默默丢弃。
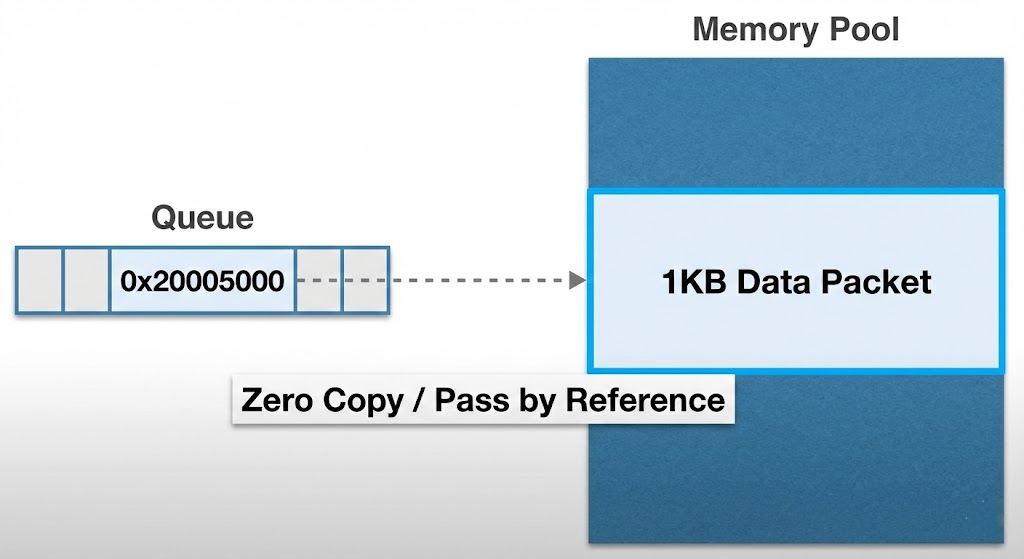
坑 2:大数据的传递
现象 :串口收到了 1KB 的数据包,怎么发给状态机?
错误做法 :在 sys_event_t 结构体里开个 uint8_t data[1024] 数组。这会瞬间爆掉任务栈,且队列复制极其耗时。
正确做法:
- 申请内存(
pvPortMalloc)或使用内存池(Memory Pool)。 - 将数据拷贝进去。
- 将指针 赋值给
evt.ptr发送。 - 切记 :在状态机处理完后,必须释放内存(如前文代码所示)。
坑 3:看门狗怎么喂?
现象 :系统没事干时,任务阻塞在 xQueueReceive,看门狗复位了。
对策:
- 使用独立看门狗任务。
- 或者使用
xQueueReceive的超时机制(例如 100ms 超时),在超时处理中喂狗,确保系统虽然没干活,但还是"活着"的。
六、本文总结
架构设计,本质上是对复杂度的管理。
- 初级工程师写代码,是在堆砌功能;
- 高级工程师写架构,是在设计约束。
这套 STM32 + FreeRTOS 事件驱动状态机,核心价值在于它强行约束了你:
- 不能随意修改状态。
- 不能在中断里做业务。
- 不能绕过事件队列搞"私下交易"。
当你习惯了这种约束,你会发现,你的代码变得无聊了------因为惊喜(Bug)变少了。而这,正是工程稳定性的最高境界。
互动话题 :
你目前的工程中,有没有遇到过"改一个 Bug 冒出两个新 Bug"的情况?欢迎在评论区贴出你的"痛苦面具",我们一起探讨。
激励自己的话 :
"真正的技术高手,不是代码写得最快的人,而是懂得用'架构的约束'去对抗'无序的熵增',让系统在岁月中从容生长的人。"