文章目录
-
- 一、引言:为什么需要灰度化与二值化?
-
- [1.1 基本概念](#1.1 基本概念)
- 二、图像灰度化:数据的精炼艺术
- 三、图像二值化:非黑即白的决策智慧
-
- [3.1 二值化的基本原理](#3.1 二值化的基本原理)
- [3.2 三种主要二值化方法](#3.2 三种主要二值化方法)
-
- [3.2.1 简单阈值法(全局阈值)](#3.2.1 简单阈值法(全局阈值))
- [3.2.2 自适应阈值法(局部阈值)](#3.2.2 自适应阈值法(局部阈值))
- [3.2.3 Otsu's 二值化(大津算法)](#3.2.3 Otsu's 二值化(大津算法))
- [3.3 方法对比与选择](#3.3 方法对比与选择)
- 四、实战应用场景
-
- [4.1 文档扫描预处理](#4.1 文档扫描预处理)
- [4.2 工业视觉检测](#4.2 工业视觉检测)
- 五、方法选择流程图
- 六、核心要点总结
一、引言:为什么需要灰度化与二值化?
在计算机视觉和图像处理领域,灰度化 和二值化是两个基础而关键的预处理步骤。它们如同从彩色世界到黑白世界的转换器,通过简化图像信息,为后续的特征提取、目标识别等高级任务奠定基础。
1.1 基本概念
- 灰度化:将彩色图像转换为单通道灰度图像
- 二值化:将灰度图像转换为只有黑白两色的图像
二、图像灰度化:数据的精炼艺术
2.1 灰度化的意义
- 降低计算复杂度:从三通道简化为单通道,处理速度提升 3 倍
- 突出结构特征:消除颜色干扰,专注于形状、纹理和轮廓
- 统一处理标准:不同颜色空间图像可统一处理
2.2 常用灰度化方法
方法对比表
| 方法 | 计算公式 | 适用场景 |
|---|---|---|
| 平均值法 | Gray = (R+G+B)/3 | 快速简单处理 |
| 加权平均法 | Gray = 0.299R+0.587G+0.114B | 符合人眼感知(推荐) |
| 最大值法 | Gray = max(R,G,B) | 保留高亮信息 |
| 最小值法 | Gray = min(R,G,B) | 保留暗部细节 |
代码实现示例
import cv2
import numpy as np
# 读取图像
image = cv2.imread('input.jpg')
# 加权平均法(推荐)
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 平均值法
gray_avg = np.mean(image, axis=2).astype(np.uint8)三、图像二值化:非黑即白的决策智慧
3.1 二值化的基本原理
二值化通过设置阈值 T,将灰度图像转换为黑白图像:
- 像素值 ≥ T → 255(白色)
- 像素值 < T → 0(黑色)
3.2 三种主要二值化方法
3.2.1 简单阈值法(全局阈值)
特点:整个图像使用同一个阈值
# 基本二值化
ret, binary = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
# 其他阈值类型
# THRESH_BINARY_INV: 反二值化
# THRESH_TRUNC: 截断
# THRESH_TOZERO: 阈值化为零3.2.2 自适应阈值法(局部阈值)
特点:根据像素局部邻域动态计算阈值,适用于光照不均图像
# 均值自适应
adaptive_mean = cv2.adaptiveThreshold(
gray, 255,
cv2.ADAPTIVE_THRESH_MEAN_C,
cv2.THRESH_BINARY, 11, 2
)
# 高斯自适应
adaptive_gaussian = cv2.adaptiveThreshold(
gray, 255,
cv2.ADAPTIVE_THRESH_GAUSSIAN_C,
cv2.THRESH_BINARY, 11, 2
)3.2.3 Otsu's 二值化(大津算法)
特点:自动寻找最佳阈值,最大化前景与背景的类间方差
# Otsu自动阈值
ret, otsu_binary = cv2.threshold(
gray, 0, 255,
cv2.THRESH_BINARY + cv2.THRESH_OTSU
)
print(f"自动计算的最佳阈值: {ret}")3.3 方法对比与选择
| 特性 | 简单阈值法 | 自适应阈值法 | Otsu's 算法 |
|---|---|---|---|
| 计算复杂度 | 低 | 中 | 中 |
| 适用场景 | 光照均匀图像 | 光照不均匀图像 | 双峰直方图图像 |
| 参数调整 | 需手动设置阈值 | 需设置邻域大小 | 自动确定阈值 |
| 处理速度 | 快 | 中等 | 中等 |
四、实战应用场景
4.1 文档扫描预处理
def preprocess_document(image):
"""文档图像预处理流程"""
# 1. 灰度化
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 2. 降噪处理
blurred = cv2.GaussianBlur(gray, (5, 5), 0)
# 3. 自适应二值化(处理光照不均)
binary = cv2.adaptiveThreshold(
blurred, 255,
cv2.ADAPTIVE_THRESH_GAUSSIAN_C,
cv2.THRESH_BINARY, 15, 10
)
return binary4.2 工业视觉检测
def detect_industrial_parts(image):
"""工业零件检测"""
# 1. 灰度化
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 2. Otsu二值化(自动阈值)
ret, binary = cv2.threshold(
gray, 0, 255,
cv2.THRESH_BINARY + cv2.THRESH_OTSU
)
# 3. 形态学处理去除噪声
kernel = np.ones((3, 3), np.uint8)
cleaned = cv2.morphologyEx(binary, cv2.MORPH_OPEN, kernel)
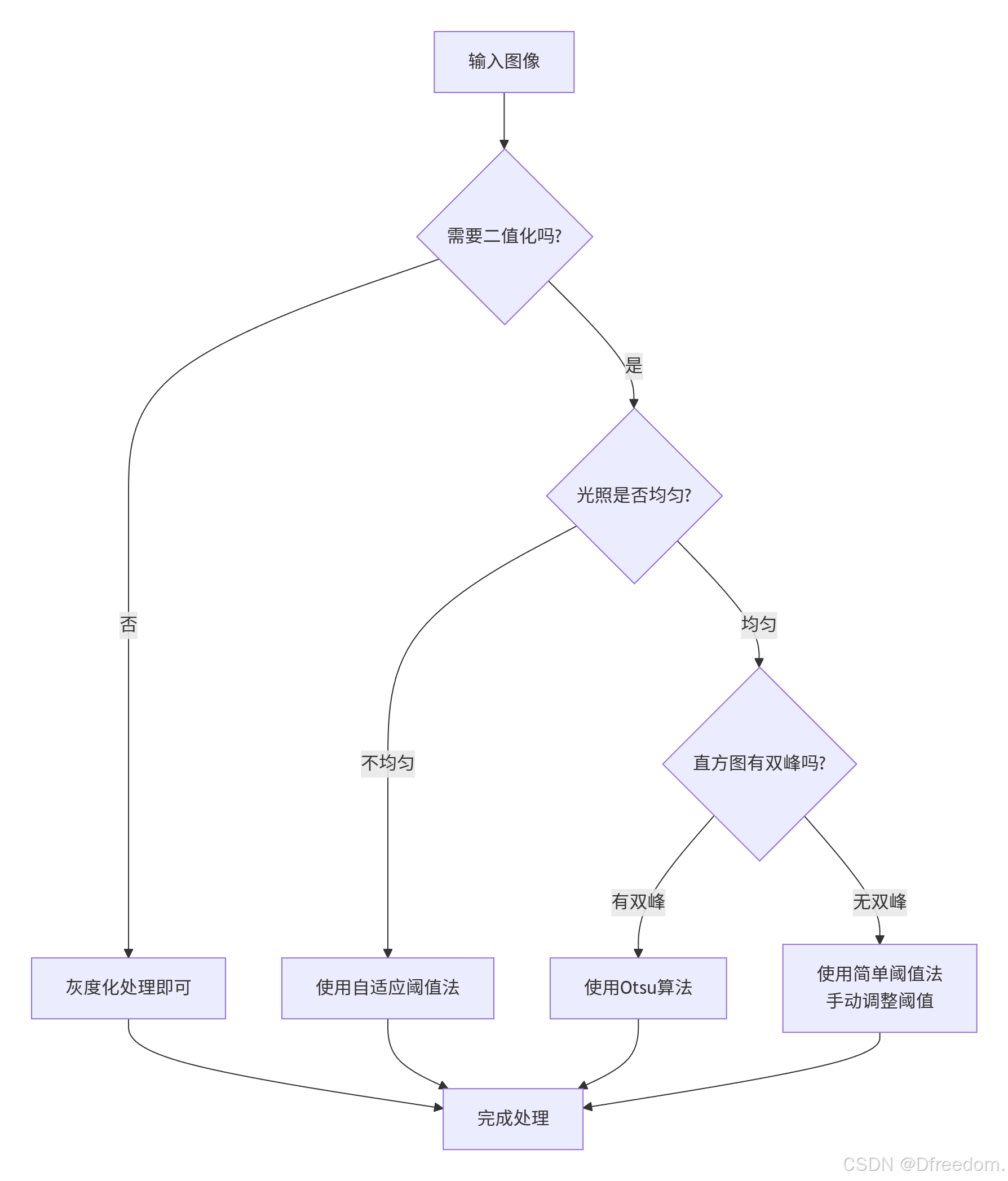
return cleaned五、方法选择流程图
六、核心要点总结
- 灰度化是降维过程,推荐使用加权平均法(0.299R+0.587G+0.114B)
- 简单阈值法适合光照均匀、对比度高的场景
- 自适应阈值法适合光照不均、背景复杂的场景
- Otsu 算法能自动寻找最佳阈值,适合双峰直方图图像