一、NVIC嵌套中断向量控制器
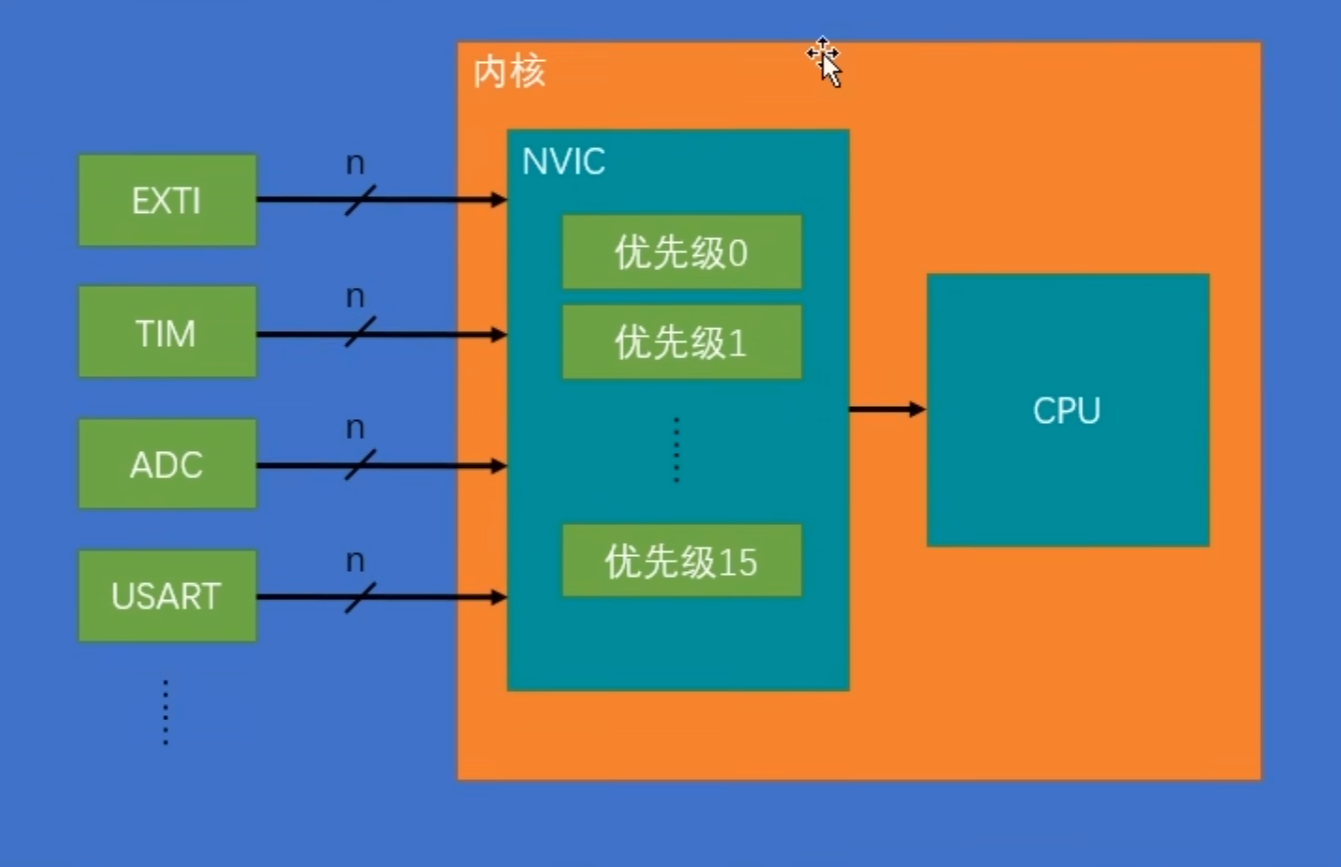
1.NVIC的作用是管理所有的中断,包括分配优先级。
2.NVIC的优先级分组
分类:抢占优先级、响应优先级
抢占优先级:可以打断正在执行的中断,直接执行。
响应优先级:可以优先排队。
分组方式:
二、EXTI外部中断
检测GPIO口信号,当电平变化时申请中断。
触发方式:上升沿、下降沿、双边沿、软件触发
注意:相同的Pin是不能同时发生中断的,例如GPIOA的PIN1和GPIOB的PIN1是不能同时开启的。
触发响应方式:中断响应:发送中断信号给芯片;事件响应:触发别的外设,不发送中断信号。
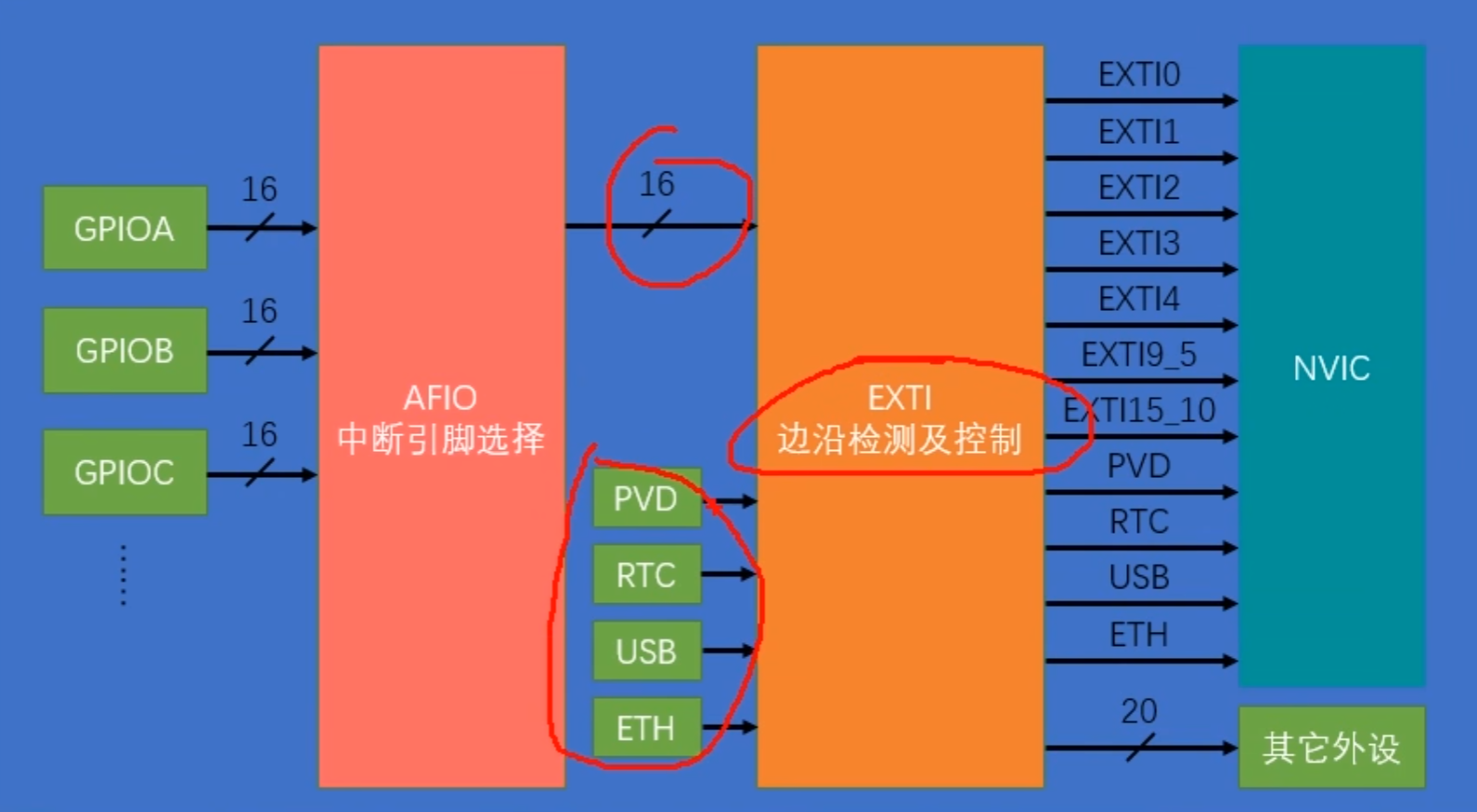
AFIO:管理引脚的复用映射,由于引脚数有限,很多外设都需要通过这些引脚进行工作,AFIO就是判断究竟是哪个外设使用这个引脚。
EXTI: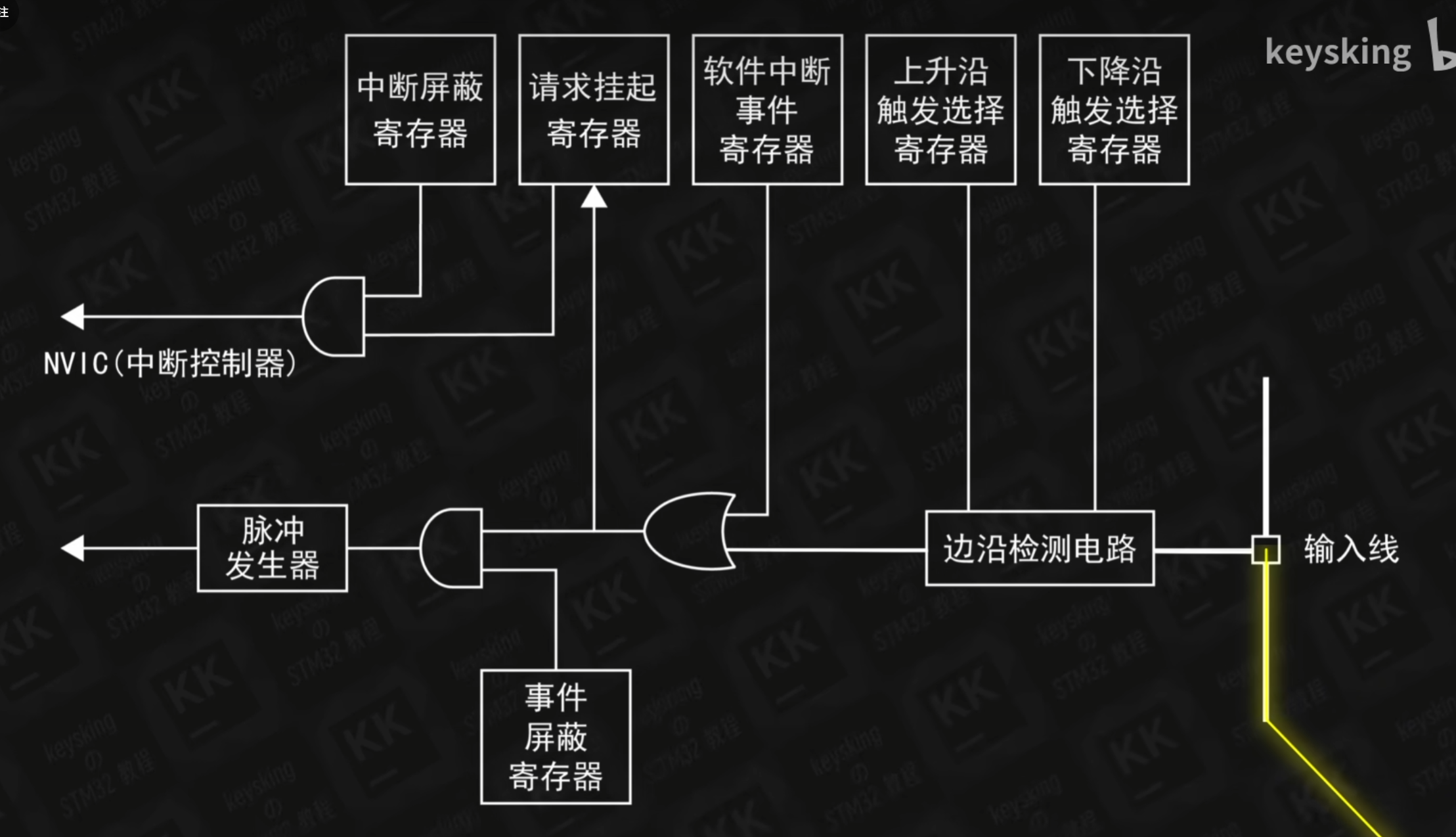
NVIC:内部储存有中断向量表,经过判断后,它会导通对应地址的电路,将信号发送到中断回调函数执行的位置。它在一直检测中断线是否激活,当函数处理完成后,它会依然检测到中断线处于激活状态,无限执行函数。为避免此,我们需要在执行完一遍函数之后,将请求挂起寄存器对应位数清除为0。
三、STM32中的EXTI外部中断的配置
需要按照上面的流程,依次打开GPIO、AFIO、EXTI、NVIC
1.打开各级时钟线

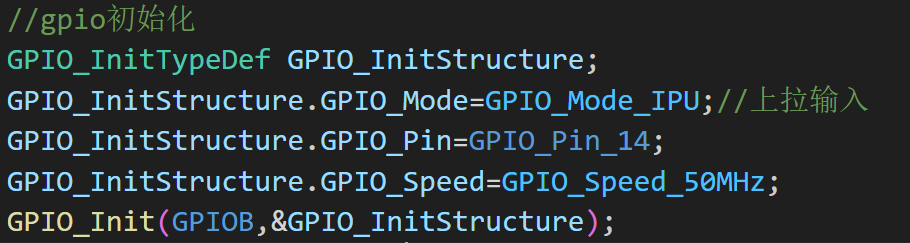
2.配置GPIO
需要配置:GPIO模式、GPIO引脚选择、GPIO频率
3.配置AFIO
需要选择打开中断的引脚

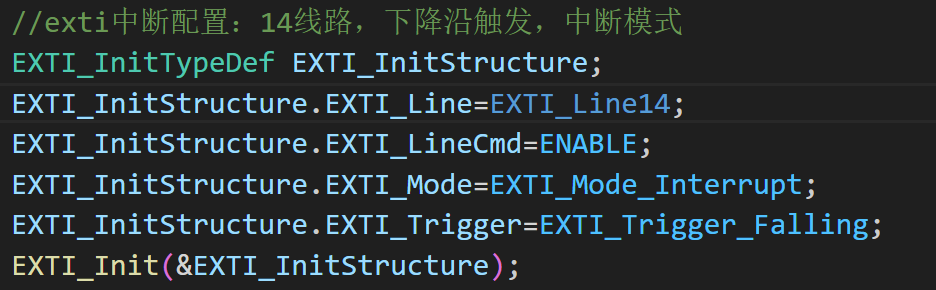
4.配置EXTI
需要配置:线路、边沿检测方式、模式
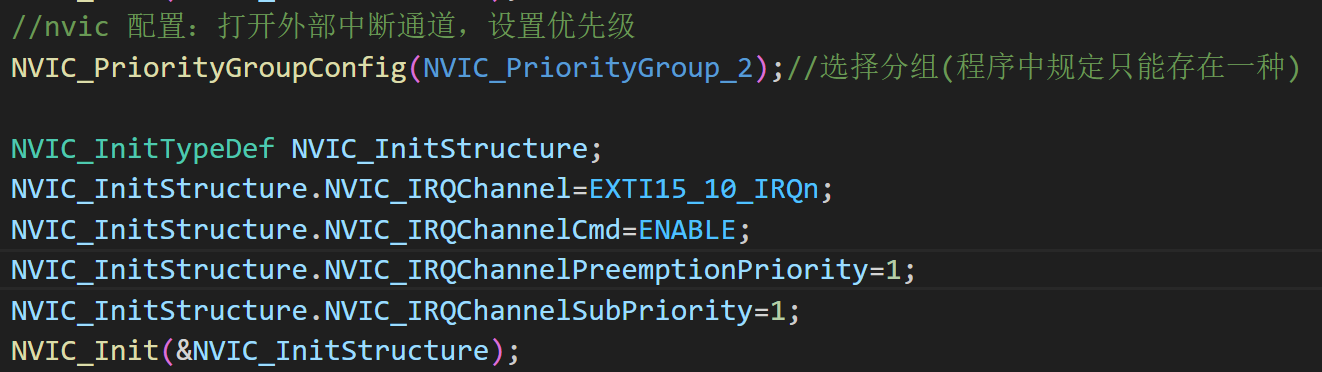
5.配置NVIC
需要设置:外部中断的分组、中断通道、中断优先级
中断分组一般默认是0组就可以。
四、标准库中的EXTI函数
cpp
//将EXTI的设置复位
void EXTI_DeInit(void);
//配置EXTI的线路
void EXTI_Init(EXTI_InitTypeDef* EXTI_InitStruct);
//软件触发中断函数
void EXTI_GenerateSWInterrupt(uint32_t EXTI_Line);
//检查线路的标志位(判断是否发生了外部中断)
FlagStatus EXTI_GetFlagStatus(uint32_t EXTI_Line);
//清空线路的标志位
void EXTI_ClearFlag(uint32_t EXTI_Line);
//判断是否有中断请求
ITStatus EXTI_GetITStatus(uint32_t EXTI_Line);
//在中断服务函数(ISR)的末尾必须调用,清除指定 EXTI_Line 的中断挂起位。
void EXTI_ClearITPendingBit(uint32_t EXTI_Line);五、中断回调函数
cpp
//中断函数
void EXTI15_10_IRQHandler()//查询得相应通道的中断回调函数名称
{
if(EXTI_GetITStatus(EXTI_Line14)==SET)//判断产生了中断请求
{
CountSensor++;//使用标志位记录
EXTI_ClearITPendingBit(EXTI_Line14);//在中断服务函数(ISR)的末尾必须调用,清除指定 EXTI_Line 的中断挂起位
}
}注意,中断是瞬时发生的事情,我们一般并不希望它占用太长的时间,但对于必须要一些时间执行的函数,我们选择在中断中放置标志位,在其他位置判断标志位来执行相应的程序。