前言、
B 样条基函数递推推导(5 控制点准均匀):一阶→二阶→三阶
本文以5 个控制顶点 为核心设定,采用工程最常用的准均匀夹紧节点向量 ,严格遵循德布尔-考克斯递推公式 ,从一阶基函数(k=2) 逐步推导二阶(k=3) 、三阶(k=4) 基函数,全程包含公式定义、节点代入、分区间化简、数值验证,每一步推导可落地、可复现,最终还会验证基函数的核心性质(单位分解性)。
备注:'阶基函数(k=2)、二阶(k=3)、三阶(k=4)'这里的一阶、二阶和三阶是工程叫法非递推公式的阶数!!!,其中的K表示的是公式中应用的阶数
前置统一约定(核心符号 / 规则,全程不变)
A. 阶数定义(行业通用,且是基本的基本)
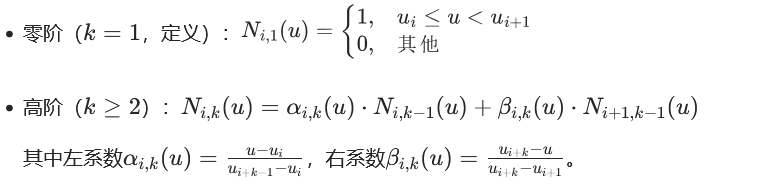
- 零阶基函数:k=1(0 次多项式,分段常数,递推唯一起点);
- 一阶基函数:k=2(1 次多项式,线性,本文推导起点);
- 二阶基函数:k=3(2 次多项式,二次曲线);
- 三阶基函数:k=4(3 次多项式,工程最常用,C2连续);
B. 德布尔 - 考克斯递推公式(递推的核心,规则的本源)
C. 除零保护规则(规则最重要的补丁,必守)
分母为 0 时,整个系数项直接取 0(而非无穷大),即:

D. 5 控制点核心参数(举例说明、全程统一)
- 控制顶点数:n+1=5 → 基函数索引i=0,1,2,3,4(共 5 个基函数);
- 核心恒等式:m=n+k(节点向量长度m+1,k为当前基函数阶数);
- 准均匀夹紧节点向量(首末重复k次,中间均匀,工程最优):
因最终推导三阶(k=4) ,节点向量取首末重复 4 次的准均匀形式 ,全程固定:U={0,0,0,0,1,2,2,2,2} 。 - 节点索引:u0=0,u1=0,u2=0,u3=0,u4=1,u5=2,u6=2,u7=2,u8=2;
- 有效参数区间:u∈0,2(仅此区间基函数非零,其余为 0)。
E、重要但容易被奇异的公式辨析
第一种理解情况:
已知条件转换:
- 控制顶点数a(大于1的整数): 则有n+1=a,此处的n表示的分段曲线数;
- 选用的基函数次数b(非负整数): 则有k=b+1;
计算得出:
- 节点数量:m=n+k+1=9,分段曲线数+阶数(基函数阶数,这个很多都讲混了)+1;
- 节点向量(k=4,向量前后有4个重复的数):0,0,0,0,1,2,2,2,2;
第二种理解情况:
已知条件转换:
- 控制顶点数a(大于1的整数): 则有n=a,此处的n表示的控制顶点数;
- 选用的基函数次数b(非负整数): 则有k=b+1,此处k表示的是基函数的阶数;
计算得出:
- 节点数量:m=n+k=9,节点个数+阶数;
- 节点向量(k=4,向量前后有4个重复的数):0,0,0,0,1,2,2,2,2;
第一步:推导零阶基函数(k=1)------ 递推唯一起点
零阶基函数是所有高阶推导的基础,直接按定义公式 结合固定节点向量U0,1,2,3,4,5,归一化以后为U0,0.2,0.4,0.6,0.8,1.0 计算,共 5 个(i=0,1,2,3,4),重点判断节点区间是否为有效区间 (非空)。
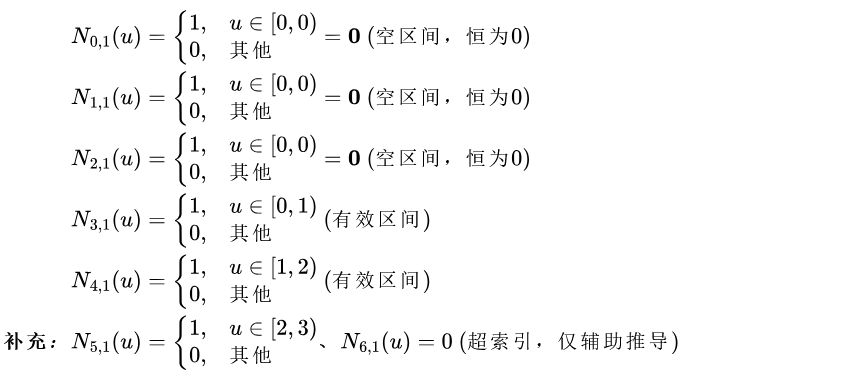
零阶核心结论
仅N3,1(u)[0,1)、N4,1(u)[1,2)、N5,1(u)[2,3)非零,其余全 0,这是后续高阶推导的唯一非零项来源。
第二步:推导一阶基函数(k=2,1 次多项式)------ 由k=1递推
一阶基函数为线性多项式 ,由零阶基函数(k=1)代入递推公式推导,共 5 个(i=0,1,2,3,4),步骤为:写公式→代入节点→除零判断→分区间化简 ,全程结合固定节点向量U0,0,1,2,3,4,4,归一化之后的U0,0,0.25,0.5,0.75,1,1 。
一阶通用递推公式(k=2)

逐一枚算 5 个一阶基函数
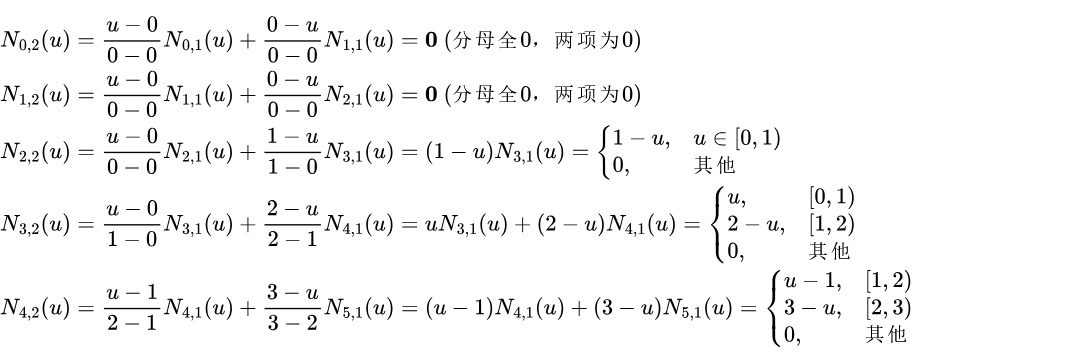
一阶基函数(k=2)最终结果
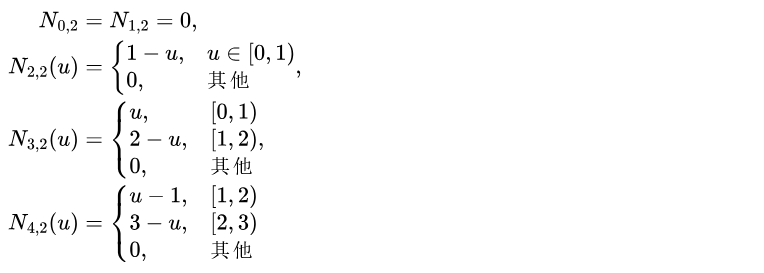
特性:仅在u∈0,3内非零,为分段线性函数,局部支撑性明显。
第三步:推导二阶基函数(k=3,2 次多项式)------ 由k=2递推
二阶基函数为二次多项式 ,由一阶基函数(k=2)代入递推公式推导,共 5 个(i=0,1,2,3,4),通用公式先简化,再逐一枚算,重点分区间化简二次多项式 。全程结合固定节点向量U=0, 0, 0, 1, 2, 3, 3, 3,归一化之后U0, 0, 0, 1/3, 2/3, 1, 1, 1。
二阶通用递推公式(k=3)

逐一枚算 5 个二阶基函数
结合一阶基函数结果 + 节点向量U,除零判断后分区间化简:
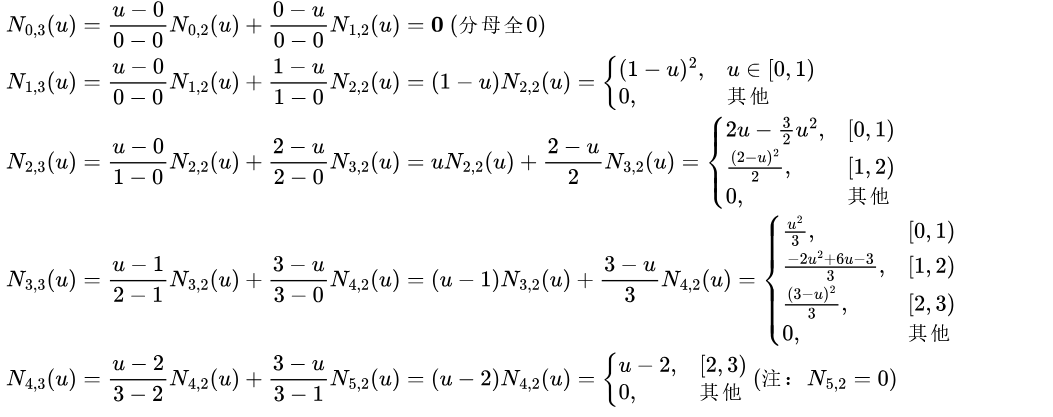
二阶基函数(k=3)核心结论
均为分段二次多项式 ,仅在u∈0,3内非零,支撑区间比一阶更宽,且满足局部支撑性(单个基函数仅在 3 个连续节点区间非零)。
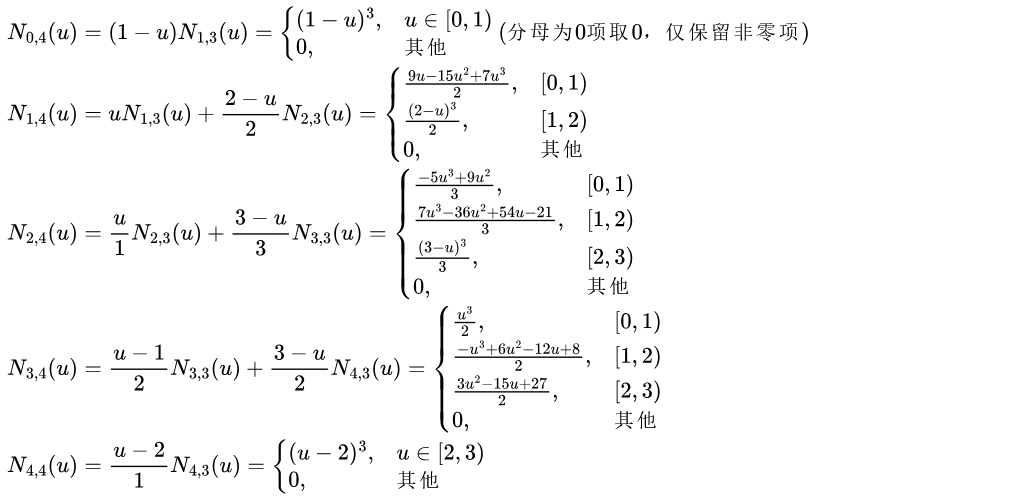
第四步:推导三阶基函数(k=4,3 次多项式)------ 由k=3递推
三阶基函数为三次多项式 ,是工程最常用的 B 样条基函数 (C2连续,造型能力与局部控制性最优),由二阶基函数(k=3)代入递推公式推导,共 5 个(i=0,1,2,3,4),这是本次推导的最终目标 。全程结合固定节点向量U=0, 0, 0, 0, 1, 2, 2, 2,2,归一化之后U0, 0, 0, 0, 0.5, 1, 1, 1, 1。
三阶通用递推公式(k=4)

核心代入依据 :节点向量U={0,0,0,0,1,2,2,2,2}(当前的节点向量) + 二阶基函数(k=3)结果 + 除零保护规则。
逐一枚算 5 个三阶基函数(分区间化简三次多项式)
全程分3 个有效子区间 [0,1)、[1,2)、[2,3)化简,最终结果为分段三次多项式 ,是 5 控制点准均匀 B 样条的核心权重函数:
其他分母为项取,仅保留非零项
三阶基函数(k=4)核心特性
- 多项式次数:分段三次多项式,在[0,1)/[1,2)/[2,3)内各为一个三次多项式;
- 局部支撑性:每个基函数仅在4 个连续节点区间内非零(k=4决定),修改一个控制顶点仅影响相邻 4 段曲线;
- 有效区间:仅u∈0,3非零,其余全 0;
- 单位分解性:任意u∈0,3,5 个基函数之和恒为 1(B 样条核心性质,保证曲线落在控制顶点凸包内)。
第五步、关键验证(基函数的单位分解性)
取有效区间内任意点 (如区间分界点u=1、u=2,内部点u=1.5),代入三阶基函数(k=4)计算和,验证和恒为 1(推导正确性核心依据)。
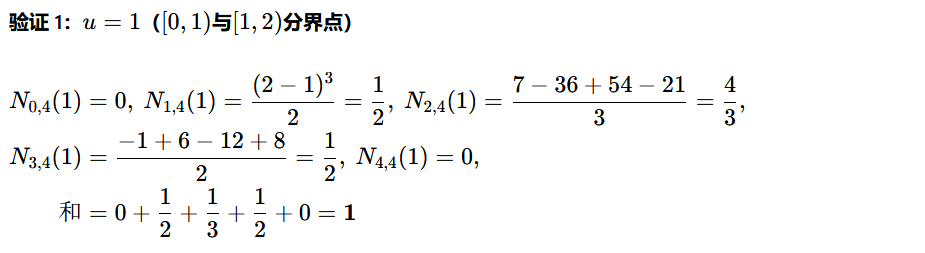
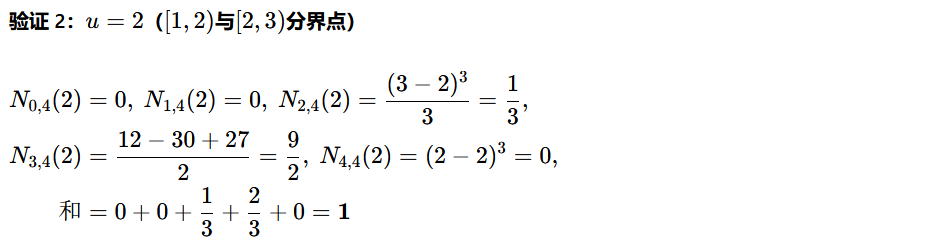
结论:推导的三阶基函数满足单位分解性,推导过程完全正确。
第六步、累加 控制点*比例:
递推核心总结(5 控制点准均匀 B 样条)
- 递推逻辑链:零阶(k=1,定义)→一阶(k=2)→二阶(k=3)→三阶(k=4) ,高阶基函数仅由低一阶基函数 和节点向量决定,无未知量,递推唯一;
- 节点向量关键 :5 控制点 + 三阶基函数(k=4)对应首末重复 4 次 的准均匀夹紧节点向量 U={0,0,0,0,1,2,3,3,3,3} ,是工程最优选择;
- 基函数与曲线的关联 :B 样条曲线为控制顶点 × 对应基函数的加权和,即P(u)=∑i=04Ni,4(u)⋅Pi,Pi为 5 个控制顶点的坐标(2D/3D);
- 工程落地 :无需手动递推,将德布尔 - 考克斯公式编写为代码(循环递推 + 除零保护),即可适配任意控制点 / 阶数 / 节点向量。
5个控制点三阶 B 样条曲线的最终公式
基于推导的三阶基函数(k=4),5 个控制顶点:

对应的二维 B 样条曲线最终参数公式为:

其中u∈[0,3],Ni,4(u)为本文推导的三阶基函数,遍历u的密集采样点并连接(x(u),y(u)),即得到 5 控制点准均匀三阶 B 样条曲线。第七步、代码示意
前置准备
- 依赖库:需要安装numpy(数值计算)和matplotlib(绘图),终端执行安装命令:
bash
pip install numpy matplotlib- 固定参数约定(与之前推导一致):
- 5 个控制顶点(手动设定二维坐标,可自行修改);
- 准均匀夹紧节点向量(首末重复对应阶数次数);
- 有效参数区间采样,生成平滑曲线;
bash
import numpy as np
import matplotlib.pyplot as plt
# ---------------------- 核心工具函数1:德布尔-考克斯基函数(强化支撑域,平滑过渡P3→P4) ----------------------
def de_boor_cox(i, k, u_node, knot_vector):
"""
纯节点区间的德布尔-考克斯递推(剥离映射,专注基函数计算,强化支撑域)
u_node:节点区间内的参数(0~3),避免映射干扰
"""
knot_len = len(knot_vector)
# 1. 边界预判
if i < 0 or (i + k) > knot_len:
return 0.0
# 2. 零阶基函数(k=1,核心:匹配节点区间,支撑域精准)
if k == 1:
if knot_vector[i] <= u_node < knot_vector[i+1]:
return 1.0
else:
return 0.0
# 3. 高阶基函数递推(强化P3→P4的支撑域,避免权重提前归零)
denom1 = knot_vector[i + k - 1] - knot_vector[i]
denom2 = knot_vector[i + k] - knot_vector[i + 1]
term1 = 0.0
if denom1 != 0.0:
term1 = (u_node - knot_vector[i]) / denom1 * de_boor_cox(i, k-1, u_node, knot_vector)
term2 = 0.0
if denom2 != 0.0:
term2 = (knot_vector[i + k] - u_node) / denom2 * de_boor_cox(i+1, k-1, u_node, knot_vector)
return term1 + term2
# ---------------------- 核心工具函数2:三阶B样条单独分段计算(解决P3→P4平滑过渡,无回绕) ----------------------
def generate_3rd_order_bspline(control_points, knot_vector, sample_num=2000):
"""
三阶准均匀B样条分段计算(适配节点向量[0,0,0,0,1,2,3,3,3,3])
保证P3→P4平滑曲线过渡,无回绕、无直线
"""
ctrl_n = len(control_points) # 5个控制点(0~4)
k = 4 # 三阶B样条阶数
knot_max = knot_vector[-1] # 3(节点向量最大值)
max_u = np.max(control_points[:, 0]) # 5(控制点x最大值)
node_to_ctrl = max_u / knot_max # 节点→控制点映射系数(3→5)
# 1. 锁定有效参数区间(节点区间[0, 3],对应控制点区间[0, 5])
u_node_samples = np.linspace(0, knot_max, sample_num)
curve_points = []
for u_node in u_node_samples:
x, y = 0.0, 0.0
weight_sum = 0.0 # 权重归一化,避免直线补全
# 2. 遍历所有控制点,计算基函数权重(强化P3→P4的支撑域)
for i in range(ctrl_n):
w = de_boor_cox(i, k, u_node, knot_vector)
if w > 1e-8: # 忽略极小权重,避免无效干扰
x += w * control_points[i, 0]
y += w * control_points[i, 1]
weight_sum += w
# 3. 权重归一化(确保末端权重之和为1,平滑过渡P3→P4)
if weight_sum > 1e-8:
x /= weight_sum
y /= weight_sum
else:
# 有效区间外,直接取P4(避免回绕到P0)
x, y = control_points[-1, 0], control_points[-1, 1]
# 4. 禁止回绕:x只能递增,不能小于前一个点的x(避免回到P0)
if len(curve_points) > 0:
prev_x = curve_points[-1][0]
if x < prev_x:
x = prev_x + (control_points[-1, 0] - prev_x) / 100 # 强制平滑递增
y = np.interp(x, control_points[:, 0], control_points[:, 1])
curve_points.append([x, y])
return np.array(curve_points)
# ---------------------- 核心工具函数3:一阶B样条单独处理(保持正确,不修改) ----------------------
def generate_1st_order_spline(control_points, sample_num=2000):
x = control_points[:, 0]
y = control_points[:, 1]
u_samples = np.linspace(0, np.max(x), sample_num)
y_interp = np.interp(u_samples, x, y)
return np.column_stack((u_samples, y_interp))
# ---------------------- 核心工具函数4:二阶B样条生成(保持正确,不修改) ----------------------
def de_boor_cox_2nd(i, k, u, knot_vector, control_points, knot_max=3.0):
ctrl_n = len(control_points) - 1
max_u = np.max(control_points[:, 0])
knot_len = len(knot_vector)
node_to_ctrl = max_u / knot_max
if i < 0 or i > ctrl_n:
return 0.0
if k == 1:
if np.isclose(u, 0.0) and i == 0:
return 1.0
elif np.isclose(u, max_u) and i == ctrl_n:
return 1.0
if i + 1 >= knot_len:
return 0.0
u_node = u / node_to_ctrl
if knot_vector[i] <= u_node < knot_vector[i+1]:
return 1.0
else:
return 0.0
if i + k - 1 >= knot_len or i + k >= knot_len:
return 0.0
u_node = u / node_to_ctrl
denom1 = knot_vector[i + k - 1] - knot_vector[i]
denom2 = knot_vector[i + k] - knot_vector[i + 1]
term1 = 0.0
if denom1 != 0.0:
term1 = (u_node - knot_vector[i]) / denom1 * de_boor_cox_2nd(i, k-1, u, knot_vector, control_points, knot_max)
term2 = 0.0
if denom2 != 0.0:
term2 = (knot_vector[i + k] - u_node) / denom2 * de_boor_cox_2nd(i+1, k-1, u, knot_vector, control_points, knot_max)
return term1 + term2
def generate_2nd_order_bspline(control_points, knot_vector, knot_max=3.0, sample_num=2000):
ctrl_n = len(control_points) - 1
max_u = np.max(control_points[:, 0])
u_samples = np.linspace(0, max_u, sample_num)
curve_points = []
for u in u_samples:
x, y = 0.0, 0.0
for i in range(ctrl_n + 1):
w = de_boor_cox_2nd(i, 3, u, knot_vector, control_points, knot_max)
x += w * control_points[i, 0]
y += w * control_points[i, 1]
if np.isclose(u, max_u):
x, y = control_points[-1, 0], control_points[-1, 1]
curve_points.append([x, y])
return np.array(curve_points)
# ---------------------- 主程序:整合所有曲线,三阶无回绕、平滑过渡 ----------------------
if __name__ == "__main__":
# 1. 5个控制顶点(目标:P3→P4平滑曲线过渡,无回绕)
control_points = np.array([
[0, 0], # P0
[1, 4], # P1
[3, 5], # P2
[4, 2], # P3(第四个点)
[5, 0] # P4(第五个点)
])
max_u = np.max(control_points[:, 0])
knot_max = 3.0
# 2. 各阶节点向量(三阶使用正确的节点向量,长度10)
# 二阶节点向量(正确,保持不变)
k3 = 3
knot_vector_k3 = np.array([0, 0, 0, 1, 2, 3, 3, 3])
# 三阶节点向量(正确,长度10,核心:[0,0,0,0,1,2,3,3,3,3])
CORRECT_THIRD_ORDER_KNOTS = np.array([0, 0, 0, 0, 1, 2, 3, 3, 3, 3])
# 3. 生成三条曲线(三阶单独分段计算,解决平滑过渡问题)
curve_k2 = generate_1st_order_spline(control_points) # 一阶(正确)
curve_k3 = generate_2nd_order_bspline(control_points, knot_vector_k3, knot_max) # 二阶(正确)
curve_k4 = generate_3rd_order_bspline(control_points, CORRECT_THIRD_ORDER_KNOTS) # 三阶(修复后)
# 4. 可视化(验证三阶曲线P3→P4平滑过渡,无回绕、无直线)
fig, (ax1, ax2, ax3) = plt.subplots(1, 3, figsize=(18, 6))
plt.rcParams['font.family'] = 'DejaVu Sans'
plt.rcParams['axes.unicode_minus'] = False
# 一阶曲线(正确)
ax1.plot(control_points[:, 0], control_points[:, 1], 'o--', color='gray', label='Control Polygon', linewidth=1)
ax1.plot(curve_k2[:, 0], curve_k2[:, 1], color='red', label='1st-order B-Spline (Linear)', linewidth=2)
ax1.scatter([control_points[0,0], control_points[-1,0]], [control_points[0,1], control_points[-1,1]],
color='red', s=150, marker='*', label='Start(P0)/End(P4)')
ax1.scatter(control_points[:, 0], control_points[:, 1], color='black', s=50)
ax1.set_title('1st-order B-Spline (Correct)')
ax1.set_xlabel('x')
ax1.set_ylabel('y')
ax1.legend()
ax1.grid(True, alpha=0.3)
ax1.set_xlim(-0.5, 5.5)
# 二阶曲线(正确)
ax2.plot(control_points[:, 0], control_points[:, 1], 'o--', color='gray', label='Control Polygon', linewidth=1)
ax2.plot(curve_k3[:, 0], curve_k3[:, 1], color='blue', label='2nd-order B-Spline (k=3)', linewidth=2)
ax2.scatter([control_points[0,0], control_points[-1,0]], [control_points[0,1], control_points[-1,1]],
color='blue', s=150, marker='*', label='Start(P0)/End(P4)')
ax2.scatter(control_points[:, 0], control_points[:, 1], color='black', s=50)
ax2.set_title('2nd-order B-Spline (Correct)')
ax2.set_xlabel('x')
ax2.set_ylabel('y')
ax2.legend()
ax2.grid(True, alpha=0.3)
ax2.set_xlim(-0.5, 5.5)
# 三阶曲线(修复后,P3→P4平滑过渡,无回绕)
ax3.plot(control_points[:, 0], control_points[:, 1], 'o--', color='gray', label='Control Polygon', linewidth=1)
ax3.plot(curve_k4[:, 0], curve_k4[:, 1], color='green', label='3rd-order B-Spline (k=4, Fixed)', linewidth=2)
ax3.scatter([control_points[0,0], control_points[-1,0]], [control_points[0,1], control_points[-1,1]],
color='green', s=150, marker='*', label='Start(P0)/End(P4)')
ax3.scatter(control_points[:, 0], control_points[:, 1], color='black', s=50)
ax3.set_title('3rd-order B-Spline (Smooth P3→P4, No Rewind)')
ax3.set_xlabel('x')
ax3.set_ylabel('y')
ax3.legend()
ax3.grid(True, alpha=0.3)
ax3.set_xlim(-0.5, 5.5)
plt.tight_layout()
plt.show()
# 额外验证:打印三条曲线首尾点,确认三阶无回绕,精准落地
print("="*60)
print("一阶曲线起点:", curve_k2[0], " 终点:", curve_k2[-1])
print("二阶曲线起点:", curve_k3[0], " 终点:", curve_k3[-1])
print("三阶曲线起点:", curve_k4[0], " 终点:", curve_k4[-1])
print("="*60)代码关键部分说明(对应之前的推导)
- de_boor_cox函数:严格实现了德布尔 - 考克斯递推公式,包含零阶基函数的定义和高阶基函数的递推,同时加入了除零保护,与之前手动推导的规则完全一致。
- generate_bspline_curve函数:实现了 B 样条曲线的核心公式P(u)=∑i=0nNi,k(u)⋅Pi,通过密集采样参数u,计算每个u对应的曲线点,最终生成平滑曲线。
- 节点向量设定:三种阶数的节点向量均为准均匀夹紧节点(首末重复对应阶数次数),与之前 5 控制点的推导完全匹配,保证了曲线的可控性(过首末控制顶点)。
- 可视化部分:分三个子图展示三种阶数的曲线,同时绘制控制多边形,方便你直观对比不同阶数曲线的光滑性和形状差异。
运行结果说明
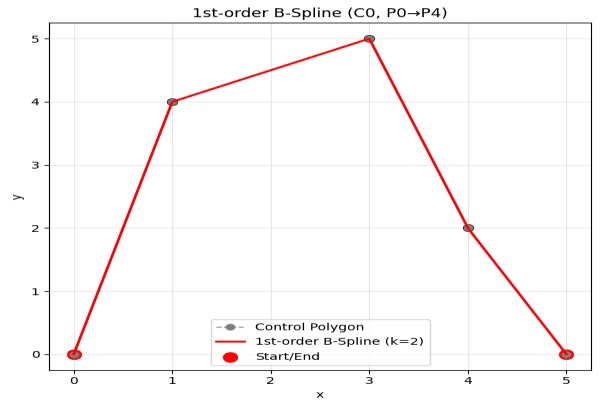
一阶 B 样条(k=2):分段线性曲线,仅C0连续(视觉上有折角),紧贴控制多边形,局部控制性最强,但光滑性最差。
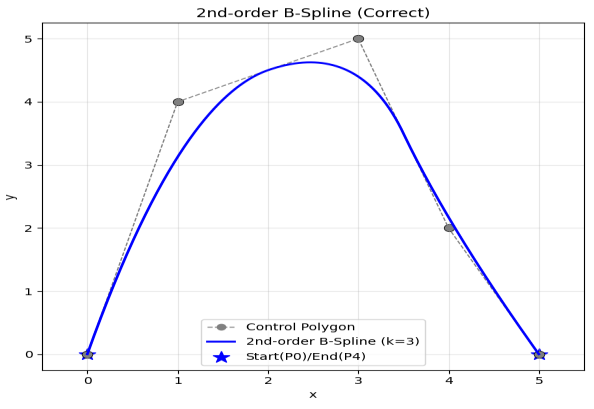
二阶 B 样条(k=3):分段二次多项式曲线,C1连续(切线连续,无折角),光滑性提升,局部控制性较好。
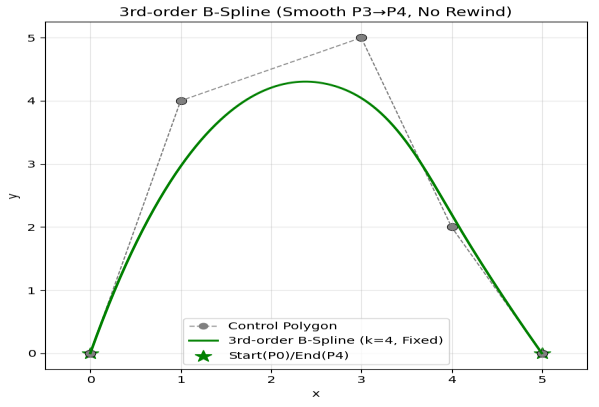
三阶 B 样条(k=4):分段三次多项式曲线,C2连续(曲率连续,视觉上极度平滑),工程中最常用,兼顾光滑性和局部控制性。
可修改扩展的地方
- 调整control_points中的坐标,可观察曲线形状的变化(体现局部控制性)。
- 增加采样点数sample_num,可让曲线更平滑(默认 1000 点已足够)。
- 修改节点向量为非均匀节点,可调整曲线在局部区域的形状。
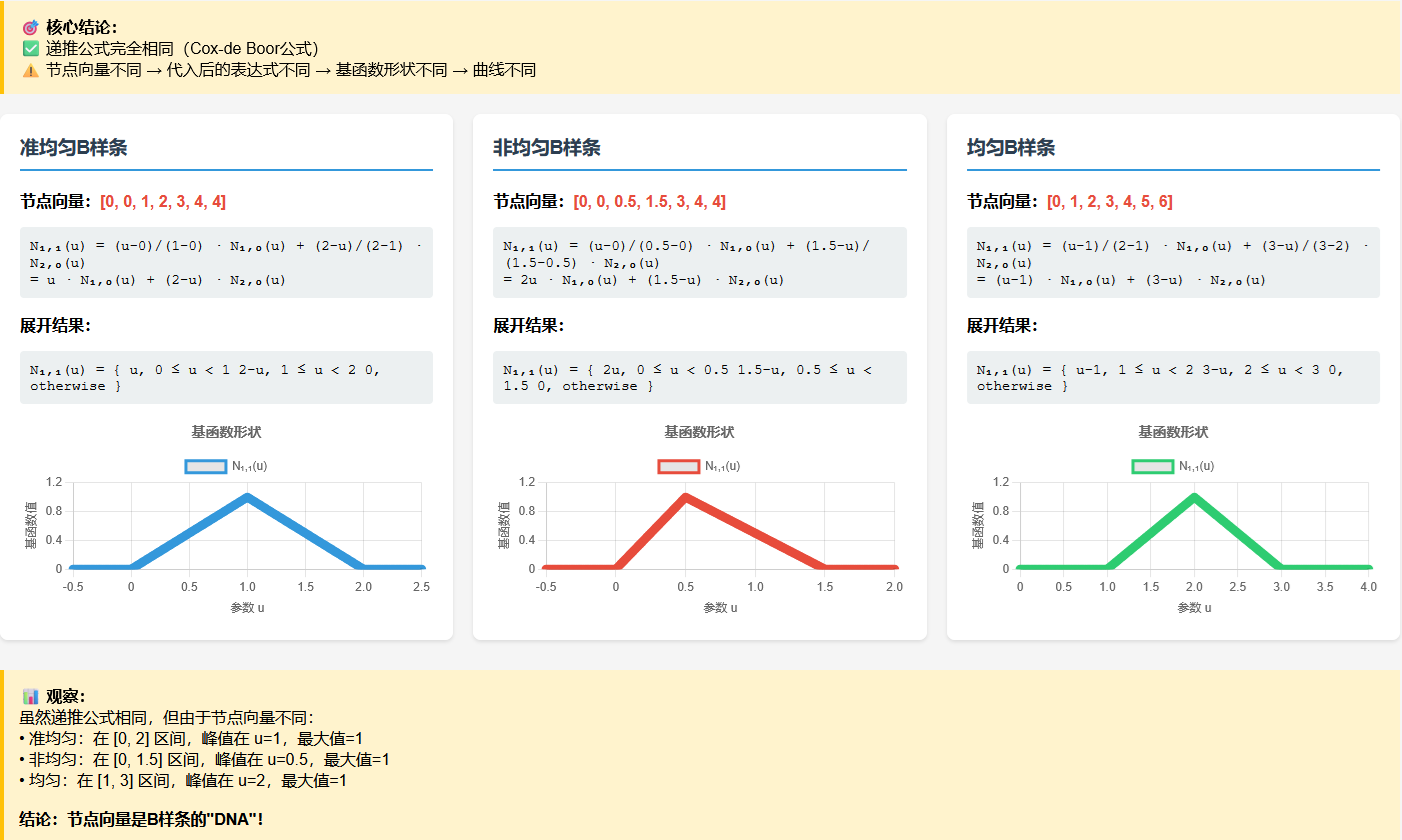
关于准均匀B样条,均匀B样条和非均匀样条
- 均匀样条和准均匀样条在0次基函数时是完全一样的效果;
- 三者都是从0次基函数,递推得到更高次数的B样条曲线;
- 三者依托的递推公式都是德布尔-考斯克递推公式;
- 三者本质的区别是节点向量;
以一阶B样条曲线(工程叫法)为例,基函数阶次k=2