Harris 角点检测
1.什么是Harris 角点检测
Harris角点检测算法是一种常用的计算机视觉算法,用于检测图像中的角点。该算法通过计算图像中每个像素的局部自相关矩阵,来判断该像素是否为角点。
Harris 角点检测通过计算像素点在各个方向上的灰度变化,来判断该点是否为角点,其核心优势是具有旋转不变性。
2.角点检测算法的基本思想
使用一个固定的小窗口在图像上进行任意方向的滑动,比较滑动前与滑动后两种情况,窗口中的像素灰度变化程度,如果存在任意方向上的滑动,都有着较大灰度变化(sobel算子),那么我们可以认为该窗口中存在角点。
3.实现 Harris 角点检测
Harris 角点检测的核心函数是cornerHarris(img, blockSize, ksize, k, dst\[, borderType]) -> dst
参数说明:
img: 输入图像。
blockSize: 角点检测中要考虑的领域大小。
ksize: Sobel求导中使用的窗口大小。
k: Harris角点检测方程中的自由参数,取值参数为 0.04, 0.06。
dst: 返回numpy.ndarray对象,大小和src相同,值越大,对应像素点是角的概率越高
代码如下:
python
import cv2
import numpy as np
img = cv2.imread(r"C:\Users\LEGION\Desktop\OIP-C.webp")
#转为灰度图
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
#执行Harris角点检测
dst = cv2.cornerHarris(gray, blockSize=4, ksize=3, k=0.04)
# 标记检测到的角点
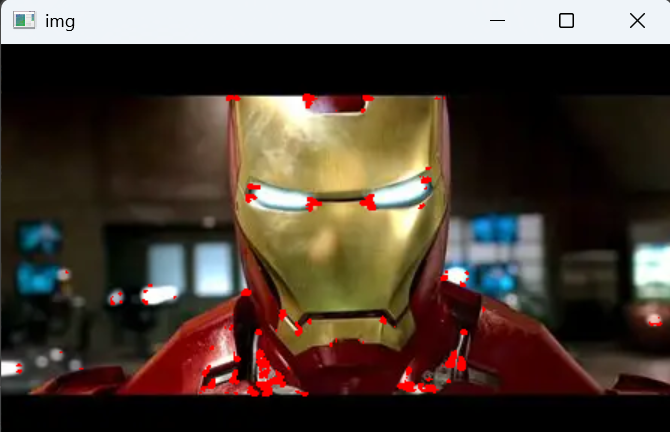
img[dst > 0.01 * dst.max()] = [0, 0, 255]
# 这里通过对角点响应进行阈值处理,标记出检测到的角点。
# 0.05 * dst.max() 是一个阈值,大于这个值的像素点会被标记为红色。
cv2.imshow('img', img)
cv2.waitKey(0)图像预处理 :彩色图像包含 RGB 三个通道的信息,角点检测只需要灰度信息即可,因此使用cv2.cvtColor()将彩色图转换为灰度图,减少计算量。
角点检测函数: cv2.cornerHarris()的返回值dst是一个与输入图像大小相同的 numpy 数组,每个元素对应原图像中对应像素点的角点响应值,响应值越高,该点是角点的可能性越大。
角点标记: 没有直接使用dst的原始值进行判断,而是使用阈值。这样可以过滤掉大量弱响应点,只保留最有可能的角点
运行结果:
SIFT 特征提取
1. 什么是 SIFT
SIFT(Scale Invariant Feature Transform)尺度不变特征变换。SIFT特征具有对旋转、尺度缩放、亮度变化等保持不变性,是一种非常稳定的局部特征。
2.SIFT 特征提取主要分为两个步骤
检测关键点(与 Harris 角点类似,但具有尺度不变性)。
计算关键点的描述符(将关键点转换为一组固定长度的向量,方便后期的特征匹配)。
3.SIFT算法的特点
1、图像的局部特征,对旋转、尺度缩放、亮度变化保持不变,对视角变化、仿射变换、噪声也保持一定程度的稳定性。
2、独特性好,信息量丰富,适用于海量特征库进行快速、准确的匹配。
3、多量性,即使是很少几个物体也可以产生大量的SIFT特征
4、高速性,经优化的SIFT匹配算法甚至可以达到实时性
5、扩招性,可以很方便的与其他的特征向量进行联合。
4.实现 SIFT 特征提取
python
man = cv2.imread(r"C:\Users\LEGION\Desktop\OIP-C.webp")
man_gray = cv2.cvtColor(man, cv2.COLOR_BGR2GRAY)#
sift = cv2.SIFT_create() #sift对象
kp = sift.detect(man_gray)
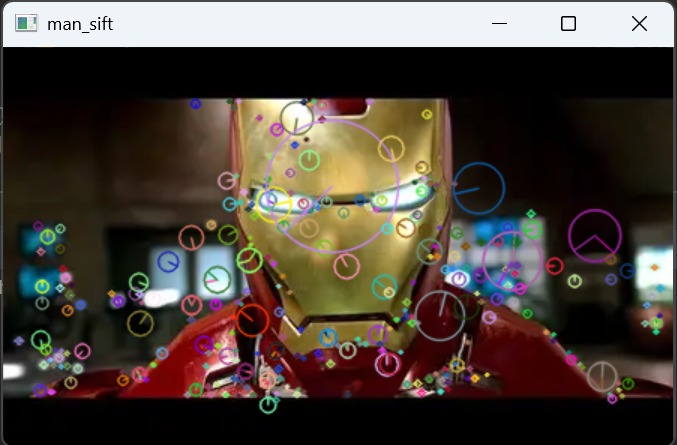
man_sift = cv2.drawKeypoints(man, kp, outImage=None, flags=cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)
cv2.imshow('man_sift', man_sift)
cv2.waitKey(0)
# 使用sift.compute()计算关键点描述符,方便后期的特征匹配
kp, des = sift.compute(man, kp) #
print(np.array(kp).shape, des.shape)
# 输出关键点的形状和描述符的形状。
# np.array(kp).shape 表示关键点的数量和属性。
# des.shape 表示描述符的数量和属性。创建 SIFT 对象 :cv2.SIFT_create()是创建 SIFT 特征提取对象的核心函数
检测关键点 :sift.detect()接收灰度图作为输入,返回一个关键点列表kp,每个关键点包含多个属性:
-
kp.pt:关键点的 (x, y) 像素坐标。 -
kp.size:关键点的大小(对应尺度空间中的尺度)。 -
kp.angle:关键点的方向(范围 0-360 度,保证旋转不变性)。 -
kp.response:关键点的响应值,用于筛选强特征点。
计算描述符 :sift.compute()用于计算关键点的描述符,描述符des是一个二维 numpy 数组,形状为(N, 128),其中N是关键点的数量,128 表示每个关键点对应一个 128 维的向量。这个向量具有独特性,能够唯一描述一个关键点,为后期的图像特征匹配提供数据支持。
输出形状信息 :np.array(kp).shape会输出关键点的数量(比如(120,)表示检测到 120 个关键点),des.shape会输出(120, 128),表示 120 个关键点对应 120 个 128 维描述符。
运行结果:
表示 347个关键点对应 347 个 128 维描述符
注意:
SIFT 算法对图像的光照变化具有一定的鲁棒性,但在强光照差异下效果会下降。
检测到的关键点数量与图像的复杂度相关,图像纹理越丰富,关键点数量越多。
128 维描述符是 SIFT 算法的默认设置,具有良好的独特性和匹配性能,无需特别修改。