在学习深度学习框架时,调用API往往只是一行代码,但理解其内部计算原理才能真正掌握模型。本文将从头实现RNN(循环神经网络)的前向传播,包括单向和双向版本,并与PyTorch官方实现进行对比验证。
一、RNN基础原理

核心公式
RNN的计算公式如下:
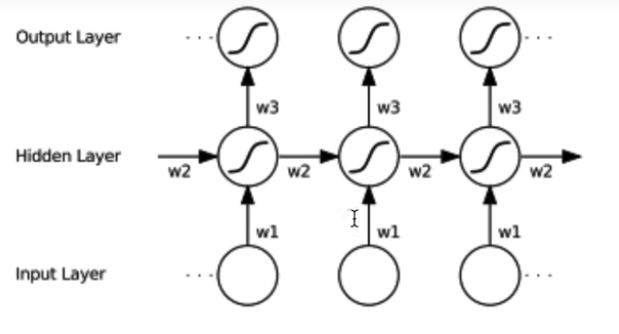
h t = tanh ( W i h x t + b i h + W h h h ( t − 1 ) + b h h ) h_t = \text{tanh}(W_{ih}x_t + b_{ih} +W_{hh}h_{(t-1)}+ b_{hh}) ht=tanh(Wihxt+bih+Whhh(t−1)+bhh)
其中:
- h t h_t ht: 表示当前状态
- x t x_t xt: 表示当前时刻的输入
- W i h W_{ih} Wih: 表示RNN对当前输入 x t x_t xt的权重矩阵------从输入层到隐藏层的权重矩阵
- b i h b_{ih} bih: 表示RNN对当前输入 x t x_t xt的偏置
- h ( t − 1 ) h_{(t-1)} h(t−1): 表示RNN上一时刻的状态
- W h h W_{hh} Whh: 表示RNN对 h ( t − 1 ) h_{(t-1)} h(t−1)的权重矩阵------从隐藏层到隐藏层的权重矩阵(循环连接)
- b h h b_{hh} bhh: 表示RNN对 h ( t − 1 ) h_{(t-1)} h(t−1)的偏置
PyTorch RNN参数详解
参数:
- input_size -- 输入 x x x 中期望的特征数量(输入特征维度)
- hidden_size -- 隐藏状态 h h h 中的特征数量(隐藏层维度)
- num_layers -- 循环层的数量。例如,设置
num_layers=2表示将两个RNN堆叠在一起形成堆叠RNN,其中第二个RNN接收第一个RNN的输出并计算最终结果。默认值:1 - nonlinearity -- 要使用的非线性激活函数。可以是
'tanh'或'relu'。默认值:'tanh' - bias -- 如果为
False,则该层不使用偏置权重 b i h b_{ih} bih 和 b h h b_{hh} bhh。默认值:True - batch_first -- 如果为
True,则输入和输出张量的格式为(batch, seq, feature)(批次大小、序列长度、特征维度),而不是(seq, batch, feature)。注意:这不适用于隐藏状态或细胞状态。详见下方输入/输出部分。默认值:False - dropout -- 如果非零,则在除最后一层外的每个RNN层输出上引入 Dropout 层,dropout 概率等于该参数值。默认值:
0 - bidirectional -- 如果为
True,则变为双向RNN。默认值:False,如果设置为True,则输出的大小是两倍的hidden_size
输入:input, hx
-
input: 张量的形状为:
- L L L is seq_len, N N N is batch size and H i n H_{in} Hin is input size.
- 非批处理输入: ( L , H i n ) (L, H_{in}) (L,Hin)
batch_first=False时: ( L , N , H i n ) (L, N, H_{in}) (L,N,Hin),(seq, batch, feature)batch_first=True时: ( N , L , H i n ) (N, L, H_{in}) (N,L,Hin),(batch, seq, feature)
包含输入序列的特征。输入也可以是打包的变长序列(packed variable length sequence)。
-
hx: 张量的形状为:
- 非批处理输入: ( D × num_layers , H o u t ) (D \times \text{num\layers}, H{out}) (D×num_layers,Hout)
- 批处理输入: ( D × num_layers , N , H o u t ) (D \times \text{num\layers}, N, H{out}) (D×num_layers,N,Hout)
包含输入序列批次的初始隐藏状态。如果未提供,默认为零。
其中:
N = batch size(批次大小) L = sequence length(序列长度) D = 2 如果 bidirectional=True,否则为 1 H i n = input_size(输入维度) H o u t = hidden_size(隐藏层维度) \begin{aligned} N &= \text{batch size(批次大小)} \\ L &= \text{sequence length(序列长度)} \\ D &= 2 \text{ 如果 bidirectional=True,否则为 } 1 \\ H_{in} &= \text{input\size(输入维度)} \\ H{out} &= \text{hidden\_size(隐藏层维度)} \end{aligned} NLDHinHout=batch size(批次大小)=sequence length(序列长度)=2 如果 bidirectional=True,否则为 1=input_size(输入维度)=hidden_size(隐藏层维度)
输出:output, h_n
-
output: 张量的形状为:
- 非批处理输入: ( L , D × H o u t ) (L, D \times H_{out}) (L,D×Hout)
batch_first=False时: ( L , N , D × H o u t ) (L, N, D \times H_{out}) (L,N,D×Hout)batch_first=True时: ( N , L , D × H o u t ) (N, L, D \times H_{out}) (N,L,D×Hout)
包含RNN最后一层在每个时刻 t t t 的输出特征 ( h t ) (h_t) (ht)。
-
h_n: 张量的形状为:
- 非批处理输入: ( D × num_layers , H o u t ) (D \times \text{num\layers}, H{out}) (D×num_layers,Hout)
- 批处理输入: ( D × num_layers , N , H o u t ) (D \times \text{num\layers}, N, H{out}) (D×num_layers,N,Hout)
包含批次中每个元素的最终隐藏状态。
二、手撕单向RNN
首先准备数据,并调用PyTorch官方API作为对比基准:
python
import torch
import torch.nn as nn
batch_size, sequence_len = 2, 3
input_size, hidden_size = 2, 3 #输入层大小即(num_features), 隐藏层大小
input = torch.randn(batch_size, sequence_len, input_size) # 随机初始化一个输入特征序列 input: [B, L, Hin(input_size)]
h_prev = torch.zeros(batch_size, hidden_size) # 初始化隐含状态 h_prev: [B, hidden_size]
# step1 调用PyTorch RNN API
rnn = nn.RNN(input_size=input_size, hidden_size=hidden_size, batch_first=True)
# rnn_output: [B, L, D*Hout] state_final: [D*numlayers, B, Hout]
rnn_output, state_final = rnn(input, h_prev.unsqueeze(0)) 接下来是核心部分------手动实现RNN前向传播:
python
# step2 手写一个rnn_forward(), 实现单向RNN的计算原理
def rnn_forward(input, weight_ih, weight_hh, bias_ih, bias_hh, h_prev):
# weight_ih: [Hout, Hin] 即 [h_dim, Hin]
# weight_hh: [Hout, Hout]
batch_size, sequence_len, input_size = input.shape
h_dim = weight_ih.shape[0] # h_dim is hidden_size weight_ih:[Hout, Hin]
h_out = torch.zeros(batch_size, sequence_len, h_dim) # [B, L, Hout] 初始化一个输出状态矩阵
for t in range(sequence_len):
# input: [B, L, Hin]
# 获取当前时刻输入特征
x = input[: , t, :] # 获取在所有batch下, 第t时刻下, 全部的input
# 所以x: [B, Hin]
x = x.unsqueeze(2)
# x.unsqueeze(2): [B, Hin, 1]
# weight_ih: [Hout, Hin]
# weight_ih_batch: [1, Hout, Hin]--->[B, Hout, Hin]
# weight_hh_batch: [1, Hout, Hout]--->[B, Hout, Hout]
weight_ih_batch = weight_ih.unsqueeze(0).tile(batch_size, 1, 1) # [B, Hout, Hin]
weight_hh_batch = weight_hh.unsqueeze(0).tile(batch_size, 1, 1) # [B, Hout, Hout]
# torch.bmm() Batch Matrix Multiplication(批次矩阵乘法),用于对多个矩阵对同时进行矩阵乘法
# 可以用torch.matmul()代替
# weight_ih_batch: [B, Hout, Hin]
# x: [B, Hin, 1]
w_times_x = torch.bmm(weight_ih_batch, x) # w_times_x: [B, Hout, 1]
w_times_x = w_times_x.squeeze(-1) # w_times_x: [B, Hout]
# h_prev: [B, Hout]
# weight_hh: [B, Hout, Hout]
# h_prev.unsqueeze(2): [B, Hout, 1]
w_times_h = torch.bmm(weight_hh_batch, h_prev.unsqueeze(2)) # w_times_h: [B, Hout, 1]
w_times_h = w_times_h.squeeze(-1) # w_times_h: [B, Hout]
h_prev = torch.tanh(w_times_x + bias_ih + w_times_h + bias_hh) # h_prev: [B, Hout]
# 将当前时间步的隐藏状态 h_prev 存入 h_out 的第 t 个位置。
# h_prev: [B, Hout]
# h_out[:, t, :]: [B, Hout]
# h_out: [B, L, Hout]
h_out[:, t, :] = h_prev
h_prev = h_prev.unsqueeze(0) # h_prev:[B, Hout]--->[1, B, Hout]
return h_out, h_prev # h_out: [B, L, Hout] h_prev: [1, B, Hout]关键实现细节解析:
-
批次矩阵乘法(bmm) :为了实现批次并行计算,需要将权重矩阵扩展到批次维度。
weight_ih.unsqueeze(0).tile(batch_size, 1, 1)将[Hout, Hin]扩展为[B, Hout, Hin],使得每个样本都能应用相同的权重进行并行计算。 -
维度对齐 :输入
x的形状是[B, Hin],通过unsqueeze(2)变为[B, Hin, 1],这样与[B, Hout, Hin]进行bmm后得到[B, Hout, 1],再squeeze回[B, Hout]。 -
状态存储 :
h_out用于存储所有时间步的输出(对应PyTorch的output),而h_prev在循环结束后保存最后时刻的状态(对应PyTorch的h_n)。
验证实现正确性:
python
# 验证单向RNN的准确性
# k是参数, v是name, 获取前面调用RNN 的API的参数, 以该参数输入我们手搓的单向RNN, 如果结果与RNN API的输出结果一致, 说明成功
custom_rnn_output, custom_state_final = rnn_forward(
input, rnn.weight_ih_l0, rnn.weight_hh_l0,
rnn.bias_ih_l0, rnn.bias_hh_l0, h_prev
)
print("Pytorch API output:")
print(rnn_output, state_final)
print("rnn_forward function output:")
print(custom_rnn_output, custom_state_final)如果两者输出一致,说明我们的手写实现与PyTorch内部计算逻辑完全吻合。
三、手撕双向RNN(Bi-RNN)
双向RNN包含两个独立的RNN:一个按正序处理序列(Forward),一个按逆序处理序列(Backward)。最终输出是两者拼接。
python
# step3 手写一个bidirectional_rnn_forward(), 实现双向RNN的计算原理
def bidirectional_rnn_forward(
input, weight_ih, weight_hh, bias_ih, bias_hh, h_prev,
weight_ih_reverse, weight_hh_reverse, bias_ih_reverse, bias_hh_reverse, h_prev_reverse,
):
# weight_ih: [Hout, Hin] 即 [h_dim, Hin]
# weight_hh: [Hout, Hout]
batch_size, sequence_len, input_size = input.shape
h_dim = weight_ih.shape[0] # h_dim is hidden_size weight_ih:[Hout, Hin]
h_out = torch.zeros(batch_size, sequence_len, h_dim*2) # [B, L, Hout*D] 初始化一个输出状态矩阵, 双向是两倍的特征大小
# forward layer
forward_output = rnn_forward(input, weight_ih, weight_hh, bias_ih, bias_hh, h_prev)[0] # 只获取`output`
# backward layer
# torch.flip(input, dims):沿指定维度翻转张量,dims 是要翻转的维度列表。
# 需要翻转sequence_len
backward_output = rnn_forward(
torch.flip(input, [1]), weight_ih_reverse, weight_hh_reverse,
bias_ih_reverse, bias_hh_reverse, h_prev_reverse
)[0] # 只获取`output`
# 把forward_output 和 backward_output填充到h_out中
h_out[:, :,:h_dim] = forward_output
h_out[:, :, h_dim: ] = torch.flip(backward_output, [1])
# 获取最后一个维度的状态
h_n = torch.zeros(batch_size, 2, h_dim) # h_n: [B, 2, Hout]
h_n[:, 0, :] = forward_output[:, -1, :] # 最后时刻的状态在L=0时候, 拼接上forward_output倒数第一个时刻的全部Hout
h_n[:, 1, :] = backward_output[:, -1, :] # 最后时刻的状态在L=1时候, 拼接上backward_output倒数第一个时刻的全部Hout
h_n = h_n.transpose(0, 1) # h_n: [2, B, Hout]
# h_out: [B, L, Hout*2]
# h_n: [2 , B, Hout]
return h_out, h_n双向RNN的实现要点:
-
反向处理 :使用
torch.flip(input, [1])将序列沿时间维度翻转,这样原来的最后一个时间步变成了第一个,实现了反向传播。 -
输出拼接 :
h_out的形状是[B, L, Hout*2],前Hout维存储正向结果,后Hout维存储反向结果。注意反向输出需要再次flip回来,保证时间步对齐。 -
最终状态处理 :
h_n需要包含两个方向的最后状态。注意对于反向层,虽然我们在翻转后的序列上计算,但backward_output[:, -1, :]实际上对应原序列的第一个时间步的状态(因为翻转了)。
验证双向RNN:
python
# 验证一下bidirectional_rnn_forward的正确性
bi_rnn = nn.RNN(input_size=input_size, hidden_size=hidden_size, batch_first=True, bidirectional=True)
h_prev = torch.zeros(2, batch_size, hidden_size)
bi_rnn_output, bi_state_final = bi_rnn(input, h_prev)
custom_bi_rnn_output, custom_bi_state_final = bidirectional_rnn_forward(
input, bi_rnn.weight_ih_l0, bi_rnn.weight_hh_l0,
bi_rnn.bias_ih_l0, bi_rnn.bias_hh_l0, h_prev[0],
bi_rnn.weight_ih_l0_reverse, bi_rnn.weight_hh_l0_reverse,
bi_rnn.bias_ih_l0_reverse,
bi_rnn.bias_hh_l0_reverse, h_prev[1],
)
print("Pytorch API output:")
print(bi_rnn_output, bi_state_final)
print("custom bi_rnn_forward function output:")
print(custom_bi_rnn_output, custom_bi_state_final)四、RNN的优缺点总结
-
RNN的优点:
- 可处理变长序列
- 模型大小与序列长度无关
- 计算量与序列长度呈线性增长
- 考虑历史信息
- 便于流式输出
- 权重时不变
-
RNN的缺点:
- 串行计算比较慢
- 无法获取太长的历史信息(梯度消失/爆炸问题)
五、总结
通过手撕RNN的实现,我们深入理解了:
- 循环机制:隐藏状态如何在时间步之间传递
- 批次处理 :如何使用
bmm实现高效的并行计算 - 双向结构:如何通过翻转序列实现双向信息融合
- 维度对齐 :理解PyTorch中各种
[B, L, H]、[L, B, H]等格式转换
虽然实际项目中我们直接使用 nn.RNN 即可,但这种底层实现训练有助于理解更复杂的变体(如LSTM、GRU)以及进行自定义修改(如加入注意力机制等)。
完整代码已验证:上述代码可直接运行,输出结果与PyTorch官方API完全一致,证明我们的数学推导和实现逻辑正确无误。