业务痛点:某区域物流公司(覆盖10城、500辆配送车、日均订单2万单)存在三大问题:
- 静态路径低效:依赖人工规划固定路线,早晚高峰拥堵路段绕路率25%,平均配送时间120分钟(行业标杆90分钟)
- 动态响应滞后:突发交通管制/订单追加时,司机凭经验调整路径,准点率仅75%(目标90%)
- 成本高企:燃油浪费(绕路)+超时罚款年超5000万元,客户满意度下降(投诉率12%)
算法团队:数据清洗(Spark)、特征工程(状态/动作/奖励特征)、Q-Learning模型训练(Ray分布式)、模拟环境构建(Gym)、策略存储(Feast)
业务团队:API网关、路径优化服务(调用Q-Learning策略)、配送调度系统集成(司机APP/控制台)、监控告警
物流运营团队:通过司机APP接收实时路径,调度员终端干预异常订单
数据准备与特征变化
(1)原数据结构(多源异构数据,来自物流系统)
① 订单系统(delivery_orders,Hive表)

② 车辆GPS(vehicle_gps,Kafka Topic)
json
// 实时车辆状态(每30秒上报)
{ "vehicle_id": "VH001", "lat": 39.9042, "lon": 116.4074, "speed_kmh": 45, "load_kg": 120, "timestamp": "2023-10-01T09:30:00Z" }③ 交通数据(traffic_status,API接口)

(2)数据清洗(详细代码,算法团队负责)
目标:处理缺失值、时空错位、噪声,输出标准化的订单、车辆、交通数据
代码文件:data_processing/src/main/python/data_cleaning.py
python
import pandas as pd
import numpy as np
from pyspark.sql import SparkSession
from pyspark.sql.functions import col,when,udf
from pyspark.sql.types import StructType,StructField,DoubleType,StringType,TimestampType
import logging
logging.basicConfig(level=logging.INFO)
logger = logging.getLogger(__name__)
def clean_order_data(spark,input_path:str,output:str):
"""清洗订单数据(处理缺失值、异常重量、时间窗口校验)"""
df = spark.read.parquet(input)
logger.info(f"原始订单数据量:{df.count()},缺失值统计:\n{df.select([count(when(col(c).isNull(), c)).alias(c) for c in df.columns]).show()}")
# 1.缺失值处理
# weight_kg缺失,用同类订单(同区域、同优先级)均值填充
df df.withColumn("weight_kg",# 修改或创建weight_kg列
when(col("weight_kg").isNull(),
df.filter(
col("origin_lat").between(39.9, 40.0) & #维度在39.9到40.0之间
col("priority") == 3 # 优先级等于3
).agg(avg("weight_kg")).first()[0]).otherwise(col("weight_kg"))
)
# 极端缺失(如区域无同类订单):用全局均值填充
global_mean_weight = df.agg(avg("weight_kg")).first()[0]
df = df.fillna({"weight_kg":global_mean_weight})
# 2.异常值处理
# weight_kg > 500kg(超大型货物,单独处理) 或<0.1kg(无效)->标记异常
df = df.withColumn("is_abnormal_weight",when((col("weight_kg")>500)|(col("weight_kg") < 0.1),1).otherwise(0))
#时间窗口校验:start >= end ->交换时间
df = df.withColumn("time_window_start", when(col("time_window_start") > col("time_window_end"), col("time_window_end")).otherwise(col("time_window_start")))
df = df.withColumn("time_window_end", when(col("time_window_start") > col("time_window_end"), col("time_window_start")).otherwise(col("time_window_end")))
# 3.去重与保存
df_clean = df.dropDuplicates(["order_id"]).select(
"order_id", "origin_lat", "origin_lon", "dest_lat", "dest_lon",
"weight_kg", "time_window_start", "time_window_end", "priority"
)
df_clean.write.mode("overrite").parquet(out_path)
logger.info(f"清洗后订单数据量:{df_clean.count()},保存至{output_path}")
return df_clean
if __name__ == "__main__":
spark = SparkSession.builder.appName("LogisticsDataCleaning").getOrCreate()
#输入/输出路径(数据湖存储)
order_input = "s3://logistics-data-lake/raw/delivery_orders.parquet"
order_output = "s3://logistics-data-lake/cleaned/orders_cleaned.parquet"
clean_order_data(spark,order_input,order_output)
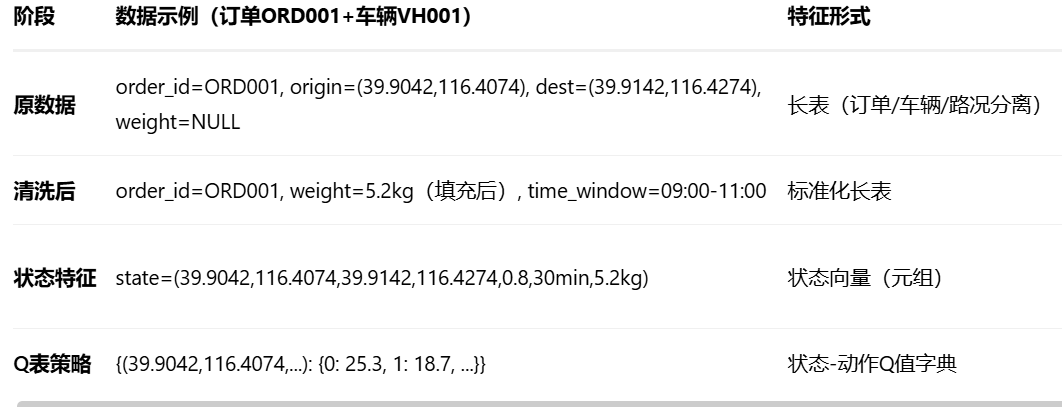
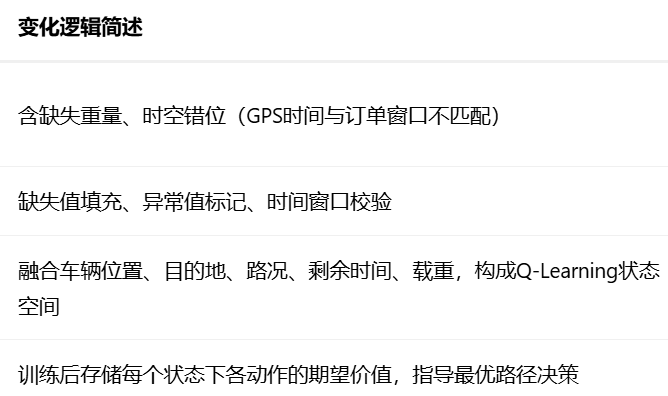
spark.stop()(3)特征工程与特征数据生成(明确feature_path/label_path)
将清洗后数据转换为Q-Learning可输入的状态特征矩阵(feature_path)和Q表策略模型(label_path),核心是设计状态、动作、奖励特征
① 状态特征生成(state_feature_generator.py)
python
import pandas as pd
from shapely.geometry import Point, LineString
import geopandas as gpd
import logging
logging.basicConfig(level=logging.INFO)
logger = logging.getLogger(__name__)
def calculate_distance(lat1, lon1, lat2, lon2):
"""计算两点间欧氏距离(简化版,实际用Haversine公式)"""
return ((lat1 - lat2)**2 + (lon1 - lon2)** 2)**0.5 * 111 # 1度≈111km
def generate_state_features(cleaned_orders: pd.DataFrame, vehicle_gps: pd.DataFrame, traffic_data: pd.DataFrame) -> pd.DataFrame:
"""生成Q-Learning状态特征(车辆位置+订单+路况)"""
# 1. 关联订单与车辆(假设1车1单,简化场景)
merged = pd.merge(vehicle_gps, cleaned_orders, left_on="current_order_id", right_on="order_id", how="left")
# 2. 计算状态特征
state_features = []
for _, row in merged.iterrows():
# 基础状态:位置、目的地、载重
state = {
"vehicle_id": row["vehicle_id"],
"order_id": row["order_id"],
"current_lat": row["lat"], "current_lon": row["lon"],
"dest_lat": row["dest_lat"], "dest_lon": row["dest_lon"],
"load_kg": row["load_kg"],
"remaining_time": (row["time_window_end"] - pd.Timestamp.now()).total_seconds() / 60 # 剩余时间(分钟)
}
# 路况特征:当前道路拥堵指数(关联GPS位置与交通数据)
current_road = traffic_data[traffic_data["road_id"] == row["current_road_id"]] # 假设GPS含道路ID
state["congestion_index"] = current_road["congestion_index"].iloc[0] if not current_road.empty else 0.5
# 距离特征:当前位置到目的地距离(km)
state["distance_to_dest"] = calculate_distance(
row["current_lat"], row["current_lon"], row["dest_lat"], row["dest_lon"]
)
state_features.append(state)
state_df = pd.DataFrame(state_features)
logger.info(f"生成状态特征:{len(state_df)}条,示例:\n{state_df.head(2)}")
return state_df② 特征数据生成(generate_feature_data.py,明确feature_path/label_path)
python
import pandas as pd
import joblib
import logging
from state_feature_generator import generate_state_features
logging.basicConfig(level=logging.INFO)
logger = logging.getLogger(__name__)
def generate_feature_data(cleaned_orders_path: str, vehicle_gps_path: str, traffic_data_path: str) -> tuple:
"""生成状态特征矩阵(feature_path)和Q表策略(label_path)"""
# 1. 加载清洗后数据
orders = pd.read_parquet(cleaned_orders_path)
gps = pd.read_parquet(vehicle_gps_path)
traffic = pd.read_parquet(traffic_data_path)
# 2. 生成状态特征矩阵(feature_path指向的文件)
state_df = generate_state_features(orders, gps, traffic)
feature_path = "s3://logistics-data-lake/processed/qlearning_state_features.parquet"
state_df.to_parquet(feature_path, index=False)
# 3. 初始化label_path(Q表策略文件,训练后生成)
label_path = "s3://logistics-data-lake/processed/q_table_policy.joblib"
logger.info(f"""
【算法团队特征数据存储说明】
- feature_path: {feature_path}
存储内容:Q-Learning状态特征矩阵(Parquet格式),含列:
vehicle_id(车辆ID)、order_id(订单ID)、current_lat/lon(当前位置)、dest_lat/lon(目的地)、
load_kg(载重)、remaining_time(剩余时间窗口)、congestion_index(拥堵指数)、distance_to_dest(距目的地距离)
示例数据(前2行):\n{state_df.head(2)}
- label_path: {label_path}
存储内容:Q表策略模型(Joblib格式),结构为字典:{state_tuple: {action: q_value}}
state_tuple: (current_lat, current_lon, dest_lat, dest_lon, congestion_index, ...)
action: 0-5(6个动作:0=直行,1=左转,2=右转,3=加速,4=减速,5=等待)
q_value: 状态-动作对的期望价值
生成时机:Q-Learning训练完成后,由train_qlearning.py写入
""")
return feature_path, label_path, state_df数据特征变化对比表(原数据→清洗后→状态特征→Q表策略):
代码结构
算法团队仓库(algorithm-path-optimization)
text
algorithm-path-optimization/
├── data_processing/ # 数据清洗(Spark/Scala)
│ ├── src/main/scala/com/logistics/DataCleaning.scala # 清洗代码(含订单/车辆/交通)
│ └── build.sbt # 依赖:spark-core, spark-sql
├── feature_engineering/ # 特征工程(状态/动作/奖励)
│ ├── state_feature_generator.py # 状态特征生成(含距离/路况计算)
│ ├── reward_calculator.py # 奖励函数实现(时效+成本+体验)
│ ├── generate_feature_data.py # 特征数据生成(含feature_path/label_path说明)
│ └── requirements.txt # 依赖:pandas, geopandas, shapely
├── model_training/ # Q-Learning模型训练(核心)
│ ├── q_learning.py # Q-Learning算法实现(含原理注释)
│ ├── train_qlearning.py # 训练入口(Ray分布式+模拟环境)
│ ├── simulate_environment.py # Gym定制物流仿真环境(路网/订单/交通)
│ └── qlearning_params.yaml # 调参记录(ε=0.1, α=0.5, γ=0.9)
├── feature_store/ # Feast特征存储(动态特征服务)
│ ├── feature_repo/ # Feast特征仓库
│ │ ├── features.py # 定义实体(vehicle_id)、特征视图(实时位置/路况)
│ │ └── feature_store.yaml # Feast配置(在线Redis/离线Parquet)
│ └── deploy_feast.sh # 部署Feast到K8s脚本
└── mlflow_tracking/ # MLflow实验跟踪
└── run_qlearning_experiment.py # 记录ε/α/γ/奖励曲线/收敛状态
python
import numpy as np
import pandas as pd
import logging
from collections import defaultdict
import ray
from simulate_environment import LogisticsEnv # 定制仿真环境
logging.basicConfig(level=logging.INFO)
logger = logging.getLogger(__name__)
class QLearningAgent:
def __init__(self, state_dim, action_dim, epsilon=0.1, alpha=0.5, gamma=0.9):
"""
Q-Learning智能体初始化
:param state_dim: 状态空间维度(特征数量)
:param action_dim: 动作空间维度(6个动作)
:param epsilon: ε-贪婪策略的探索率(默认10%探索)
:param alpha: 学习率(Q值更新步长,默认0.5)
:param gamma: 折扣因子(未来奖励权重,默认0.9)
"""
self.state_dim = state_dim
self.action_dim = action_dim
self.epsilon = epsilon # 探索率(ε-贪婪策略)
self.alpha = alpha # 学习率(α)
self.gamma = gamma # 折扣因子(γ)
# Q表:嵌套字典 {state: {action: q_value}},初始Q值为0
self.q_table = defaultdict(lambda: defaultdict(float))
def choose_action(self, state):
"""ε-贪婪策略选择动作:以ε概率探索(随机动作),1-ε概率利用(最大Q值动作)"""
if np.random.uniform(0, 1) < self.epsilon:
# 探索:随机选择动作(0-5)
return np.random.randint(0, self.action_dim)
else:
# 利用:选择当前状态下Q值最大的动作
state_actions = self.q_table[state]
if not state_actions: # 状态未见过,随机选
return np.random.randint(0, self.action_dim)
return max(state_actions, key=state_actions.get)
def update_q_value(self, state, action, reward, next_state):
"""Q值更新(核心公式):Q(s,a) ← Q(s,a) + α[r + γ·maxQ(s',a') - Q(s,a)]"""
current_q = self.q_table[state][action]
# 下一状态的最大Q值(若next_state未见过,max_q=0)
max_next_q = max(self.q_table[next_state].values()) if self.q_table[next_state] else 0
# 更新Q值
new_q = current_q + self.alpha * (reward + self.gamma * max_next_q - current_q)
self.q_table[state][action] = new_q
def train(self, env, episodes=1000):
"""训练Q-Learning智能体:与环境交互episodes轮"""
for episode in range(episodes):
state = env.reset() # 重置环境,获取初始状态
total_reward = 0
done = False
while not done:
# 1. 选择动作(ε-贪婪策略)
action = self.choose_action(state)
# 2. 执行动作,获取环境反馈(下一状态、奖励、是否结束)
next_state, reward, done, info = env.step(action)
# 3. 更新Q值
self.update_q_value(state, action, reward, next_state)
# 4. 转移到下一状态
state = next_state
total_reward += reward
# 每100轮打印训练进度
if episode % 100 == 0:
logger.info(f"Episode {episode}, Total Reward: {total_reward:.2f}, Epsilon: {self.epsilon}")
# 衰减探索率(随训练进行减少探索)
self.epsilon = max(0.01, self.epsilon * 0.995)
logger.info("Q-Learning训练完成,Q表收敛")
return self.q_table
# 示例:物流场景状态编码(将状态特征元组化,作为Q表键)
def encode_state(state_features: dict) -> tuple:
"""将状态特征字典编码为Q表键(元组)"""
return (
round(state_features["current_lat"], 4), round(state_features["current_lon"], 4),
round(state_features["dest_lat"], 4), round(state_features["dest_lon"], 4),
round(state_features["congestion_index"], 2), round(state_features["remaining_time"], 1),
round(state_features["load_kg"], 1)
)
python
import joblib
import pandas as pd
from q_learning import QLearningAgent, encode_state
from simulate_environment import LogisticsEnv
from feature_engineering.generate_feature_data import generate_feature_data
import ray
import logging
logging.basicConfig(level=logging.INFO)
logger = logging.getLogger(__name__)
def train_and_save_policy():
# 1. 初始化Ray分布式训练
ray.init(num_cpus=4)
# 2. 生成特征数据(获取feature_path和label_path)
feature_path, label_path, state_df = generate_feature_data(
cleaned_orders_path="s3://logistics-data-lake/cleaned/orders_cleaned.parquet",
vehicle_gps_path="s3://logistics-data-lake/cleaned/gps_cleaned.parquet",
traffic_data_path="s3://logistics-data-lake/cleaned/traffic_cleaned.parquet"
)
# 3. 加载状态特征,初始化仿真环境
env = LogisticsEnv(state_df) # 定制物流仿真环境(路网+订单+交通)
state_dim = len(env.state_features[0]) # 状态特征维度
action_dim = 6 # 6个动作(0-5)
# 4. 训练Q-Learning智能体
agent = QLearningAgent(
state_dim=state_dim, action_dim=action_dim,
epsilon=0.1, alpha=0.5, gamma=0.9
)
q_table = agent.train(env, episodes=2000) # 训练2000轮
# 5. 保存Q表策略到label_path(Joblib文件)
joblib.dump(q_table, label_path)
logger.info(f"Q表策略已保存至{label_path},共{len(q_table)}个状态")
# 6. 记录MLflow实验
import mlflow
with mlflow.start_run(run_name="q_learning_path_optimization"):
mlflow.log_param("epsilon", agent.epsilon)
mlflow.log_param("alpha", agent.alpha)
mlflow.log_param("gamma", agent.gamma)
mlflow.log_metric("q_table_size", len(q_table))
mlflow.log_artifact(label_path) # 上传Q表文件
if __name__ == "__main__":
train_and_save_policy()业务团队仓库(business-path-optimization)
text
business-path-optimization/
├── api_gateway/ # API网关(Kong配置)
├── path_optimization_service/ # 路径优化服务(Go)
│ ├── main.go # FastAPI风格Go服务(调用Q表策略+Feast特征)
│ └── Dockerfile # 容器化配置
├── dispatch_system/ # 配送调度系统(Java+React)
│ ├── backend/ # Spring Boot后端(订单管理/路径渲染)
│ ├── frontend/ # React前端(司机APP/控制台)
│ └── sql/ # PostgreSQL表结构(路径历史/策略版本)
├── monitoring/ # 监控告警(Prometheus+Grafana)
└── deployment/ # K8s部署配置(服务/Ingress)
go
package main
import (
"encoding/json"
"fmt"
"log"
"net/http"
"path/to/joblib" // 伪代码:Joblib加载Q表
"path/to/feast" // 伪代码:Feast客户端
)
// 请求/响应结构体
type PathRequest struct {
VehicleID string `json:"vehicle_id"`
OrderID string `json:"order_id"`
CurrentLat float64 `json:"current_lat"`
CurrentLon float64 `json:"current_lon"`
}
type PathResponse struct {
VehicleID string `json:"vehicle_id"`
OptimalAction int `json:"optimal_action"` // 0-5动作
NextWaypoint struct {
Lat float64 `json:"lat"`
Lon float64 `json:"lon"`
} `json:"next_waypoint"`
ETA string `json:"eta"` // 预计到达时间
}
// 全局变量:加载Q表策略和Feast客户端
var qTable map[string]map[int]float64 // 伪代码:Q表结构
var feastClient *feast.Client
func init() {
// 加载Q表策略(label_path文件)
qTable = joblib.Load("s3://logistics-data-lake/processed/q_table_policy.joblib")
// 初始化Feast客户端(调用算法团队特征服务)
feastClient = feast.NewClient("feast-feature-service:6566") // K8s内部服务名
}
// 路径优化API处理函数
func optimizePathHandler(w http.ResponseWriter, r *http.Request) {
var req PathRequest
if err := json.NewDecoder(r.Body).Decode(&req); err != nil {
http.Error(w, "Invalid request", http.StatusBadRequest)
return
}
// 1. 调用Feast获取实时特征(路况/剩余时间)
features, err := feastClient.GetOnlineFeatures(
[]string{"congestion_index", "remaining_time"},
map[string]interface{}{"vehicle_id": req.VehicleID},
)
if err != nil {
http.Error(w, "Failed to get features", http.StatusInternalServerError)
return
}
// 2. 构造状态特征(编码为Q表键)
state := encodeState(req.CurrentLat, req.CurrentLon, features.DestLat, features.DestLon,
features.CongestionIndex, features.RemainingTime, 0) // 载重简化处理
// 3. 查询Q表,选择最优动作(最大Q值)
actionQValues := qTable[state]
if actionQValues == nil {
// 状态未见过,随机选择动作(探索)
actionQValues = make(map[int]float64)
for i := 0; i < 6; i++ {
actionQValues[i] = 0.0
}
}
optimalAction := 0
maxQ := -1e9
for action, q := range actionQValues {
if q > maxQ {
maxQ = q
optimalAction = action
}
}
// 4. 构造响应(动作→下一航点)
resp := PathResponse{
VehicleID: req.VehicleID,
OptimalAction: optimalAction,
NextWaypoint: calculateNextWaypoint(req.CurrentLat, req.CurrentLon, optimalAction),
ETA: calculateETA(req.CurrentLat, req.CurrentLon, features.DestLat, features.DestLon),
}
w.Header().Set("Content-Type", "application/json")
json.NewEncoder(w).Encode(resp)
}
func main() {
http.HandleFunc("/api/optimize-path", optimizePathHandler)
log.Println("Path optimization service started on :8080")
log.Fatal(http.ListenAndServe(":8080", nil))
}